1. Introduction
In recent years, a variety of different applications, such as face, speech, images or handwriting recognition, natural language processing, and automatic medical diagnostics, have demonstrated outstanding performance by applying Deep Learning (DL) techniques [
1]. To further improve application performance and add additional features, complex Deep Neural Networks (DNN) designs are currently being studied. However, this results in increasingly high computational requirements. To satisfy these requirements, integrated circuit manufacturers have focused on increasing the number of available cores, the working frequencies of processing cores and memory systems, and the specialized hardware circuits. Lately specialized hardware accelerators paired with high bandwidth memory systems is the preferred architecture to manage the high computational demands at manageable power levels. Apart from these mainstream applications, a new class of systems is trying to take advantage of DNN algorithms to solve various tasks. These applications come from the field of smart sensors and devices. Unlike mainstream applications, these have lower complexity but, at the same time, require very low power consumption, as most of these systems have to operate on batteries for long periods of time. Some of these applications can even be implemented on low-cost, low-power microcontrollers such as the ones built around the ARM Cortex-M core.
This paper aims to briefly review the representative achievements in the area of DL implementations on low-cost ARM Cortex-M core-based microcontrollers. In addition to this overview, we also highlight the current challenges for DL implementation on low-power microcontrollers. The ARM Cortex-M core-based architecture is already present in the focus of researchers because of the tooling and firmware support provided by the manufacturers that are very helpful, especially to reduce the development effort, time, and cost. A recent systematic review for tiny machine learning existing research [
2] has shown that STM32 microcontrollers and ARM Cortex-M series represent the top of hardware devices used in the field. Our aim is to promote and encourage future research in this area by presenting the state-of-the-art applications already available in this field. To the best of our knowledge, this is the first work addressing an overview of the utilization of ARM Cortex-M core-based microcontrollers for DL paradigms.
More specifically, we will focus on the following main topics needed in building efficient edge processing systems: Typical DNN embedded architectures, Optimization Techniques (Pruning, Quantization, etc.), the ARM Cortex-M core (M3, M4, M7, etc.), the selected microcontroller and the chip manufacturer (STM (Plan-les-Ouates, Switzerland), TI (Dallas, TX, USA), Samsung (Suwon City, Korea), Application/Use Case and, finally, Experimental Results with special emphasis on the reported accuracy, inference time, and power consumption.
We summarize our main contributions as follows:
We present some low-cost, e.g., less than USD 10 per microcontroller, representative hardware devices and support libraries or tools that are commonly used for DL deployments.
We provide a brief overview of more than 10 papers using ARM Cortex-M core-based microcontrollers for DL applications. The following main points are presented: model architecture, hardware features (e.g., memory footprint, core architecture, and operating frequency), tools and support libraries, and results obtained (e.g., accuracy, inference time, and power consumption).
We discuss the results with a focus on the papers in which the best results were obtained. The main reasons that make it difficult to achieve the target results are also discussed.
We provide challenges and research opportunities that emphasize important issues that hinder progress in this area.
This paper is organized as follows. In
Section 2 we introduce the migration from cloud to edge computing. We also describe some hardware devices and support libraries or tools for DL embedded implementation. In
Section 3 we present an overview of DL implementations using the ARM Cortex-M core. In
Section 4, based on the earlier review, we provide insights related to the topic of the paper along with future research challenges and trends.
Section 5 concludes this paper.
2. From Cloud to Edge Computing
Usually, DL models require high computational power and substantial available memory, especially if we refer to State-Of-The-Art (SOTA) models. For this reason, some applications based on DL models use cloud computing services, e.g., Google Colaboratory [
3], which is a free cloud service hosted by Google. There are also other popular services such as AWS Deep Learning AMIs [
4], the Microsoft MLOps solution for accelerated training, deployment, and management of the deep learning projects, and Azure [
5]. At the same time, using a cloud computing approach has some significant drawbacks. On the one hand, in a classical cloud computing paradigm, a large number of computational tasks are executed in the cloud. Therefore, traffic overload of the network may cause unacceptable delays in some real-time scenarios [
6]. On the other hand, real-time inference is an important consideration, especially for latency-sensitive applications such as autonomous driving. In this case, a cloud computing approach can introduce significant latencies. In addition, there are concerns about whether data transmission to the cloud can usually be performed in a sufficiently secure manner. For these reasons, on-device computing is a new trend that brings deep learning models computation directly to the source of data, rather than transmitting the data to remote devices with high computational capabilities. This approach is generally found under the name of edge computing [
7]. The relevant DL applications for edge computing are present in several fields such as smart multimedia, smart transportation, smart cities, and smart industry [
8].
This migration from cloud computing to edge computing also comes with certain constraints or limitations that must be considered when developing a DL architecture for a certain task. This is due to computational limitations that are inherent when considering edge computing using resource-constrained low-power embedded devices. To mitigate this problem, two approaches are commonly used: (1) different compression methods are applied to existing DL models and (2) the architecture itself must be optimized directly from the design stage [
9].
Considering the first approach, to run a DL model on embedded devices, one or more compression algorithms must be applied. Examples of the most common compression algorithms are: quantization of the model parameters [
10], neural network pruning [
11], network distillation [
12], and binarization [
13].
For the second approach, the basic idea is to obtain an optimized architecture that after the training process does not require the use of compression methods. SqueezeNet architecture made a significant contribution in this direction [
14]. The main purpose of this architecture is to obtain a small number of parameters with minimal impact on accuracy.
It is important to note that the embedded devices are suitable only for the inference task, which is much less expensive in terms of computational resources compared to the training process. Among these embedded devices are also general-purpose microcontrollers that have been used with high efficiency in various fields, such as IoT applications [
15].
2.1. Embedded Hardware for Deep Learning
In the last decade, computational constraints have become easier to cope with due to the introduction of specialized hardware devices on the market, at an accelerated pace [
16]. These hardware devices that are found in the context of DL are usually called hardware accelerators. They are optimized and specialized hardware architectures that can reduce system cost and power consumption by optimizing the necessary resources while improving performance [
17]. For instance, common implementations of hardware accelerators are based on the use of FPGAs, GPUs, ASICs [
18], or Tensor Processing Units (TPUs) developed by Google [
19]. The embedded system used to implement deep learning applications must have high processing capacity, as well as be able to acquire and process data in real time. At the same time, the processor must have enough memory to store the model data and the parameters.
System-On-Chip (SoC) devices are an attractive solution that, in addition to high processing capabilities, includes multiple peripheral devices that can be very helpful for the sophisticated requirements of deep-learning applications. Examples of manufacturers that develop AI integrated circuits for edge computing are Samsung, Texas Instruments, Qualcomm, and STM. Some of their recent products are briefly presented below.
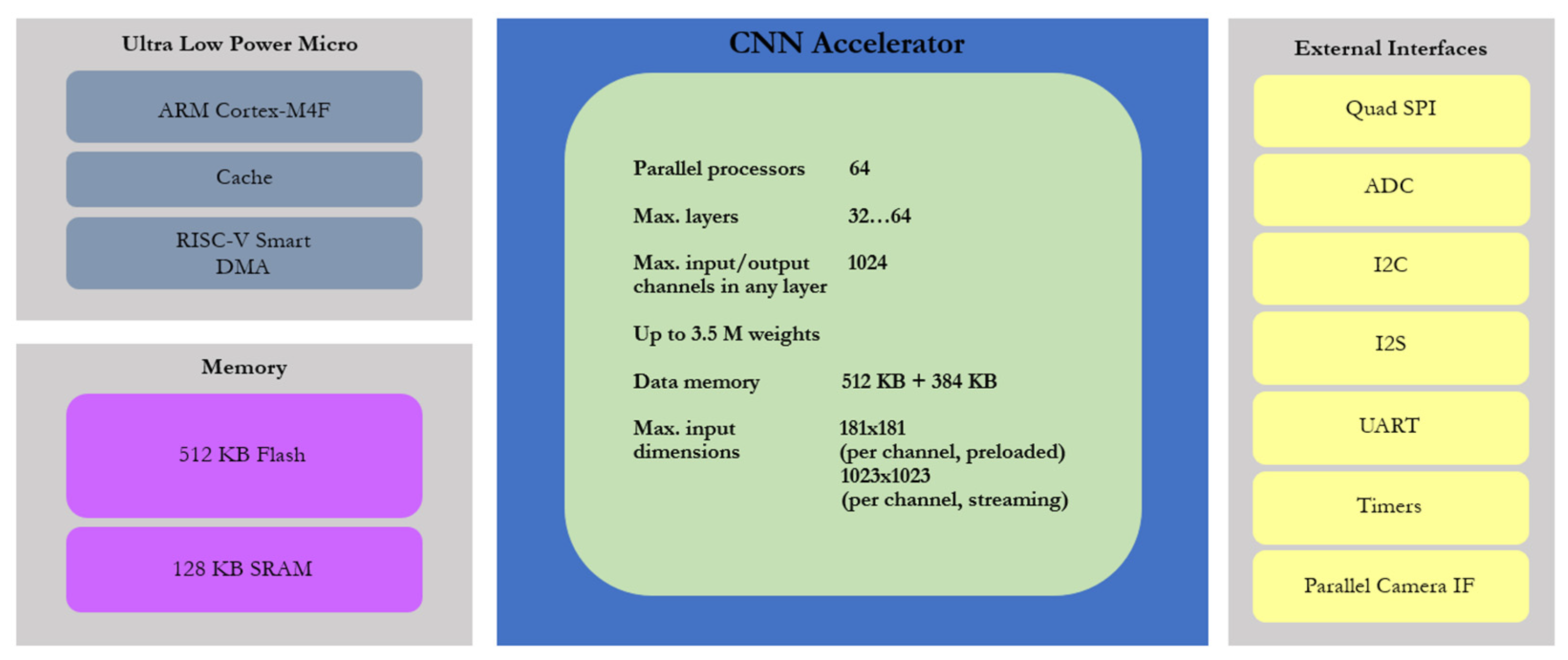
The Maxim Integrated MAX78000 ultra-low power microcontroller is a relatively new device specially designed for edge Artificial Intelligence (AI) applications. Integrates a dedicated Convolutional Neural Network (CNN) accelerator along with a low-power ARM Cortex-M4 core and a RISC-V core [
20]. Low power AI applications can be developed using this architecture, because it provides a variety of configuration options such as different oscillators, clock sources, or operation modes. One of the main advantages of this device is that it combines an energy-efficient AI processing unit with Maxim Integrated’s proven ultra-low power microcontrollers. It is suitable for battery-powered applications. The architecture is briefly presented in
Figure 1, which summarizes the main features of the CNN accelerator and the microcontroller, such as cores, memory footprint, and external interfaces. The microcontroller has a dual core architecture: an ARM Cortex-M4 Processor with FPU running at clock frequencies of up to 100 MHz and a 32-Bit RISC-V Coprocessor running up to 60 MHz. To demonstrate the performance of this device, two applications were used: Keywords Spotting [
21] and Face Identification [
22]. The accuracy results are quite promising, 99.6% for keywords spotting and 94.4% for face identification.
STMicroelectronics is another example of a manufacturer that has made important contributions to the market to support AI edge computing as a new paradigm for IoT. These contributions were aimed at running neural networks on STM32 general purpose microcontrollers, with a significant impact on the productivity of edge AI system developers by reducing application deployment time. In this case, the focus is not on hardware accelerators, but on an extensive software toolchain designed to port DNN models to standard STM32 microcontrollers with high efficiency for the ARM Cortex-M4 and M7 processor core. The STM32CubeMX.AI framework will be detailed in the next section. A similar solution is also developed for SPC5 automotive microcontrollers. In this case an AI plug-in called SPC5-STUDIO-AI of the SPC5-STUDIO development environment is used.
A Parallel-Ultralow Power (PULP) SoC architecture has been developed [
23] in order to achieve peak performance for the new generation of IoT applications, which have higher computing power requirements, up to giga operations per second (GOp/s), and a memory footprint of up to a few MB. However, to be competitive for IoT applications, the power consumption budged had to be maintained at levels similar to those of existing solutions such as ARM Cortex-M microcontrollers. Named Mr. Wolf [
23], the device is a fully programmable SoC for IoT edge computing. It contains a RISC-V general purpose processor and a parallel computing cluster. The RISC-V processor was designed to handle the connectivity tasks and manage the I/O peripherals for the system integration with the outside world. This accelerator was designed to handle computationally intensive tasks. It consists of eight customized RISC-V cores, with DSP capabilities and other extensions such as Single Instruction Multiple Data (SIMD) or bit manipulations instructions. Mr. Wolf SoC has already been used in several applications such as tactile data decoding [
24], electromyographic gesture recognition [
25], stress detection using a wearable multisensor bracelet [
26], electroencephalography signals classification for brain–machine interfaces [
27]. The results showed that Mr. Wolf exceeds the performance of ARM Cortex-M processors, while maintaining low power consumption.
Other SoCs also have optimization and embedding solutions. For instance, a 16 nm SoC [
28] was recently developed with dedicated optimizations for automatic speech recognition real-life applications. Another example is the TI TDAx series of boards [
29].
2.2. Deep Learning Frameworks and Tools for Embedded Implementation
Firmware support for microcontrollers has seen accelerated development in recent years. Some examples of firmware and framework solutions are: CMSIS-NN released by ARM in 2018 which is an open source library consisting of efficient kernels developed to maximize Neural Network (NN) performance on ARM Cortex-M processors [
30], TensorFlow Lite Micro which is an open source Machine Learning framework to enable DL models on embedded systems [
31], STM X-CUBE-AI expansion package providing capabilities of automatic conversion of a pretrained Neural Network for 32 bit microcontrollers [
32], MicroTensor (µTensor) which is a lightweight Machine Learning (ML) framework used for TensorFlow models and optimized for ARM cores [
33], and PyTorch Mobile to execute ML models on edge devices using the PyTorch ecosystem [
34].
CMSIS-NN was developed to help build IoT applications that run small neural networks directly on the systems that collect the data. This approach is preferred over cloud computing, as the number of IoT nodes is increasing. This leads to bandwidth limitations, as well as increasing latencies. The utility of this library has been demonstrated using a CNN designed for image classification task on the CIFAR-10 dataset. An ARM Cortex-M7 platform was used for the demonstration, obtaining a classification of 10.1 images per second with an accuracy of 79.9% [
30,
35].
With the multitude of available embedded platforms, with different hardware support, converting and optimizing an inference model to run on such a device is a very difficult task. TensorFlow Lite Micro was designed to address this situation and provide a unified ML framework. Covers these shortcomings with a flexible ML framework for embedded devices. In summary, this is an interpreter-based approach where hardware vendors have the possibility to provide platform-specific optimizations; it can be easily adapted to new applications and official benchmark solutions are supported.
X-CUBE-AI is a package that extends the capabilities of STM32CubeMX.AI. It adds the possibility to convert a pre-trained NN into an ANSI C library that is performance optimized for STM32 microcontrollers based on ARM Cortex-M4 and M7 processor cores. The generated ANSI C source files are then compiled to run inference on the microcontroller. The generation process using this framework is depicted in
Figure 2. In fact, CMSIS-NN kernels are used at a low level, but using this tool has a series of advantages for the developers such as: a graphical user interface, support for different DL frameworks such as Keras and TensorFlow Lite, 8-bit-quantization, and compatibility with different STM32 microcontroller series.
µTensor is a framework that converts a model built and trained with TensorFlow into a microcontroller-optimized C++ code. Its structure consists of a runtime library and an offline tool that make this conversion possible. The resulting C++ source files can be compiled to obtain an efficient and optimized inference engine that can run on ARM microcontrollers.
3. Deep Learning on ARM Cortex-M. Case Reviews of Uses
F. Alongi et al. [
36] used deep learning techniques to perform weather forecasting using a Deep Tiny Neural Network (DTNN) running on a standalone system without cloud dependencies. The standalone system was based on the STM32 microcontroller and the X-CUBE-AI toolchain to automatically convert the neural network model to an optimized microcontroller version. The predictions are made using atmospheric pressure as input parameter. They provide a detailed description of the system architecture constructed around the STM32 microcontroller. The core is ARM Cortex-M4 microcontroller with 512 kB flash memory and 96 kB SRAM memory. Additionally, a Raspberry PI is used to manage the data visualizer. A real-time operating system Miosix is used for thread management [
37]. The authors investigated several models. Recurrent Neural Networks (RNN) such as Long Short-Term Memory (LSTM) and Gated Recurrent Units (GRU) were employed because they are used quite often for time series data processing. Mixed-architecture CNN-RNN was investigated due to the promising results for time series data processing. In the end, the authors settled on four different families of models: LSTM, GRU, CNN-LSTM and CNN-GRU. The model with the best performance for each family was selected. The dataset used was obtained from a certified weather station and used further as input data through specific pre-processing steps. For training, the Keras and TensorFlow frameworks have been considered. The results were presented using the following metrics: Normalized Root Mean Square Error (NRMSE) and Normalized Mean Absolute Error (NMAE). They provide a detailed description of the models that have shown the best performance, such as number of layers, LSTM cells, and filters. Based on the results, LSTM and GRU have been selected as promising candidates. After further analysis of the memory footprint using the X-CUBE-AI Analyze tool, considering the trade-off between complexity and accuracy, a LSTM model has been selected for the final evaluation. The performance of the system has been evaluated in real-time conditions for 30 days. The results are slightly different from those obtained in the validation stage. This could be explained because the tests were performed approximately 50 km from the place where the training data were acquired. The NRMSE result was 0.0328 and NMAE 0.0251.
S. Akhtari et al. [
38] implemented a Deep Neural Network (DNN) running on a STM32 microcontroller to monitor the applied load in a powertrain system. More specifically, the goal was, using smart sensors, to monitor the condition in order to perform predictive maintenance, to reduce costs. If the applied forces are known, the operating conditions can be estimated, and possible defects can be predicted in time. To detect the applied forces, they measure the vibrations using a capacitive accelerometer. They used the microcontroller STM32F469AI, an ARM Cortex-M4 with 2 MB flash memory and 384 + 4 kB SRAM memory working at a frequency of 180 MHz Fast Fourier Transform (FFT) was calculated for the vibration signal and implemented on the same microcontroller. They used the Keras framework to build the DNN neural network. The DNN has three convolutional layers, followed by three fully connected dense layers having approximately 45,000 training parameters. The main objective behind this topology was to extract useful characteristics from the vibration signal in the frequency domain using the convolutional layers and to classify them using the fully connected layers. Seven forces have been selected to be classified, resulting in seven output classes. The pre-trained model was automatically converted to an optimized C library using the STM32Cube.AI tool. The overall accuracy is 97.71%, slightly lower than the accuracy obtained with the original model before conversion. The lowest accuracy is still higher than 90%. Therefore, it can be concluded that this work is a very good example of a DNN implementation on the STM32 ARM Cortex-M4 microcontroller, providing good results for industrial applications when using the STM32Cube.AI toolchain. As an important note, the microcontroller can handle the DNN and FFT algorithms with the help of the DSP features of the STM32.
A. A. Jordan et al. [
39] proposed the implementation of a Convolutional Neural Network (CNN) for the detection of drowsiness. The system was integrated in smart glasses, as a wearable device. The method has been compared with a method commonly used in similar applications, which is based on threshold detection mechanisms. An IR sensor was used to provide the input data. The detection is based on the eye blink events. This is a difficult task because there may be different normal situations that could be interpreted as blinking. They provide a detailed description of the dataset used and the IR signal waveform. The basic CNN architecture is composed of two 1D convolution layers with 6 and 12 filters, with a filter size of 7 for both layers. Every convolution layer is followed by a mean-pooling layer. At the end, a fully connected layer is used to predict the class. The model has been optimized using the binary cross-entropy loss function and the efficient Adam version of gradient descent. After training for 30 epochs using a batch size of 10, the average accuracy achieved for 5 iterations was 98.2%, ±0.8%. In order to improve the accuracy, the number of convolutional layers and the number of filters per layer as well as the size of the filters and the type of down-sampling operation have been varied. As a result, they present seven CNN models that have shown the best accuracy. Specifically, the highest average accuracy was 99.5%. The microcontroller that was integrated in the glasses belongs to the STM32L451xx family. It is designed on the 32 bits ARM Cortex-M4 core and was used at a frequency of 40 MHz. It has a ROM memory of 512 kB and 160 kB of RAM memory. The X-CUBE-AI toolchain has been used in order to convert the pre-trained models. On top of the accuracy constraint, there was an additional application requirement to limit the ROM memory used to 90 kB. The resulting usage by X-CUBE-AI is 47 kB. They provided a detailed description of different performance metrics for all the models evaluated compared to the threshold-based mechanism. Examples of the performance metrics that were considered are: execution time, average power consumption, sensitivity, specificity, and accuracy. They concluded that CNN models provide better accuracy than the threshold-based mechanism method. For every model, they discussed the behavior regarding performance metrics. The lowest average accuracy was 87.4% and the highest was 90.8%. Finally, the model that proved the best performance had the following specificities compared to the threshold-based mechanism: sensitivity, specificity, and accuracy were improved with 10%, more than 4%, and almost 6%, respectively. As a drawback, power and memory consumption increased. However, for the average MCU power consumption there is only a slight increase from 3.5 mW to maximum 5 mW. The authors concluded that the ability to generalize was improved compared to the threshold-based method, respecting the constraints of memory and power consumption.
F. de Vita et al. [
40] developed an AI-based system in the field of IoT smart agriculture. The system is intended to use a neural network to detect diseases in coffee plants, and it can run on resource-constrained devices, such as low-power microcontrollers. Because of the limitations imposed by cloud computing, such as latency and security, and edge computing approach has been considered more suitable for this work, as the processing is performed directly on the device. The application is called Deep Leaf and uses a Quantized Convolutional Neural Network (Q-CNN) running on the STM32 microcontroller. They implemented five different models using the X-CUBE-AI tool: (1) a 32-bit floating point model, (2) a compressed model, (3) a quantized model using TensorFlow Lite converter, (4) a quantized model using an integer representation, and (5) a quantized model using a fixed-point Q-format representation. They provide performance analysis using the following metrics: inference time, memory utilization, and energy consumption. A STM32F746GDISCOVERY development platform with the ARM Cortex-M7 core-based STM32F746NG microcontroller was used. It has 1 MB of flash memory and 340 kB of RAM memory. The features of the X-CUBE-AI tool, such as compression and quantization techniques, have been used to convert the model to meet microcontroller constraints. The dataset used consists of images of healthy and diseased coffee leaves. Data augmentation techniques have been applied to increase the number of images, and noise has been added to the images to improve noise tolerance. A detailed description of the CNN architecture is provided: the number of layers and filters, the type of activation function, etc. Four classes are selected to be considered: (1) healthy, (2) miner, (3) phoma, and (4) rust. The system consists of a box where a leaf is introduced to be analyzed. For all five models, the accuracy, precision, and recall metrics have been measured. The same performance was obtained for the TensorFlow Lite and integer quantized models as for the 32-bit floating point model. For the Qm,n quantized model, a slight decrease in accuracy was obtained. This was 95%, a percent lower than the maximum accuracy. Additionally, the models have been compared in terms of flash and RAM utilization, average inference time, and average energy consumption. The authors concluded that the quantized model using a fixed-point Q-format representation is suitable for deployment on the microcontroller. For this model, the average energy consumption is 134.12 mJ, the lowest compared to the other models. An important conclusion was that the quantization techniques outperformed the compression method in all performance metrics considered.
L. Grzymkowski et al. [
41] present a performance analysis of Convolutional Neural Networks (CNNs) deployed on an ARM microcontroller. This work addresses the problem from a different perspective, namely the performance impact of CNN depending on various aspects such as core frequency, memory access, or DSP instructions utilization. They provide a description of Real-Valued and Complex-Valued Neural Networks (RVNN and CVNN), highlighting the differences especially for the complex-valued type. TensorFlow Lite and CMSIS NN have been used as inference engines developing benchmarks to measure the performance of CNNs under various conditions. In order to execute the benchmarks, they used NXP i.MX RT1050 development board with ARM Cortex-M7 core and 512 kB SRAM memory. Different CNN architectures derived from a baseline model have been tested. Both RVNNs and CVNNs have been tested with a focus on the inference time and less on the accuracy. The input images used belong to the CIFAR-10 dataset, which consists of 32 × 32 color images. The results concerning the memory footprint showed that the required flash memory using CMSIS NN is significantly lower than using TensorFlow Lite. RAM memory utilization depends on the NN size (the number of layers or parameters), and was similar for both CMSIS NN and TendorFlow Lite for the same NN size. Regarding the inference time, with TensorFlow Lite better results have been obtained. The efficiency of computation with TensorFlow Lite is higher when the NNs are deeper, unlike CMSIS NN, where the efficiency remains constant. The inference time for RVNN and CVNN has been measured in detail for every layer, concluding that with DSP acceleration the computation times are similar for both. Therefore, if a complex-valued representation is required from the accuracy point of view, this can be used without penalty on the inference time. Finally, an analysis was performed using different core frequencies and cache configuration. Detailed results have been provided that highlight the importance of these configurations to achieve an optimal system. For example, the effects of memory latency at different core frequencies on inference time were analyzed. The importance of understanding the whole system in order to obtain an energy efficiency application, improving the inference time using DSP instructions, and considering memory access latency represents a key conclusion of the presented approach.
M. T. Nyamukuru et al. [
42] developed a shallow Gated Recurrent Unit (GRU) neural network on a low power ARM Cortex-M0+ microcontroller to classify eating episodes called Tiny Eats GRU. To detect eating episodes, they used a contact microphone that senses jaw movement whose output is analyzed by a microcontroller. For the detection of audio events, the GRU neural network was used. The network was modified to comply with the memory and computation constraints of the microcontroller. The ARM Cortex-M0+ is the most energy-efficient ARM processor operating at 48 MHz clock frequency with a very restricted memory footprint of 32 kB RAM and 156 kB flash. The dataset used was collected from 20 participants classified as eating and not eating. A pre-processing step has been applied to the dataset by computing a Short-Time Fourier Transform (STFT) to extract the features. These features were used to train the neural network. A floating-point model was initially trained using Python and TensorFlow Keras, followed by an integer quantized model implemented in Pytorch. The trained integer quantized model was implemented on the microcontroller. The feature extraction was performed using only 23 kB (9%) of memory. The GRU inference time was 6 ms for one sample, using 12 kB (4%) of memory. The authors, on the one hand, show that it is possible to develop an efficient GRU neural network on a low-cost resource-constraint ARM Cortex-M0+ microcontroller that includes the implementation of STFT and 8-bit quantization with only 2% decrease in accuracy. On the other hand, they show that the usage of computational efficiency soft-sign activation function achieving a cross-validation accuracy of 96.13% and 94.41% for floating-point and quantized weight implementation, respectively.
G. Cerutti et al. [
43] proposed an implementation of an outdoor sound event detection application using deep learning techniques on the ARM Cortex-M4 microcontroller, as part of the IoT concept. The authors present this as the first work in which a student-teacher approach is used for sound event recognition at the edge. This approach refers to the fact that a smaller network (student) is trained to mimic the output of the larger one (teacher). The UrbanSound8K dataset has been selected for training/testing purposes. It consists of 8732 city environment audio samples organized in 10 classes. The teacher model consists of a VGGish feature extractor, and a Gated Recurrent Unit (GRU) classifier followed by a fully connected layer. A new distillation strategy is presented, called two-stage distillation. Using this strategy, an accuracy of 72.67% was achieved, with a three-point improvement compared to the traditional distillation strategy. The STM32L476RG platform has been selected for implementation. The CMSIS-NN framework was used to implement the networks on the ARM Cortex-M4 microcontroller. A detailed description of the quantization design from 32-bit floating-point to 8-bit fixed-point representation is provided. The main target was to achieve a prediction accuracy as close as possible to the 32-bit floating point representation. The results have been evaluated in terms of power consumption, execution, and recognition accuracy. The average accuracy performance decrease has been only 2% compared to the floating-point implementation. The execution time is compared using a SIMD unit as a ‘fast’ implementation and a ‘basic’ implementation (not using the SIMD unit). Experiments show that a ‘basic’ convolutional layer takes more than half of the overall execution time. In addition, the implementation with SIMD directives has been compared with a plain C implementation. The conclusion of this comparison was that the optimized CMSIS-NN implementation increases the execution time by 2.32 times. The execution time for each 1-second audio-clip was of 125.6 ms, significantly lower than of the plain C model that was of 291.4 ms. The average power consumption has been of 5.5 mW. The RAM memory required was 34.4 kB.
S. Adhau et al. [
44] have implemented a Deep Neural Network for Model Predictive Control (DNN-MPC) using an ARM microcontroller. More specifically, they investigated the performance of a deep learning-based MPC model for anesthesia control for intravenous anesthesia drug delivery. Since linear MPC models have high computational demands, they are not suitable for real-time implementation. However, by using deep learning methods to provide an accurate approximation of the linear MPC control law, the computational complexity and memory footprint are reduced. A Recurrent Neural Network (RNN) has been chosen, as such a model is usually used for MPC applications. Training data was collected from simulations. The training process was performed offline using the MATLAB-based neural network time series function and the Levenberg–Marquardt method. The training was stopped when no further generalization improvement was visible, and the Mean Squared Error (MSE) and the Regression (R) got close to zero. The microcontroller was an ARM Cortex-M3 with 512 kB flash memory and 96 kB SRAM memory, running at a frequency of 84 MHz. The computational time of the iteration is reduced from 11.354 ms to 2.99 ms. These results are shown as a comparison between a linear MPC and a DNN MPC, including data and program memory usage. The memory footprint was similar, but they mentioned that, in the case of larger systems, the difference will be much more visible.
G. Cerutti et al. [
45] implemented a Convolutional Neural Network (CNN) for the detection of outdoor human presence using a low-resolution thermal camera. The inference is executed on a 32-bit ARM Cortex-M4 microcontroller with 1 MB flash memory and 128 kB SRAM memory. Grid-EYE infrared array sensor is used to sense an 8 × 8 thermal image every 10 Hz. Thermal cameras are more suitable to be used, but the cost and power consumption are much higher than PIR sensors. The dataset used is a custom one, which has been extended by adding images taken under different temperature circumstances. Some preprocessing steps were applied to the image (background subtraction and running background average) before being used as input to the CNN. The network architecture is simple, targeting a binary classification: ‘person’ or ‘no person’. It consists of three convolutional layers and one fully connected layer. The hyperparameters kernel size and stride were three and one, respectively. The Rectified Linear Unit (ReLu) activation function was used for the convolutional layers and sigmoid for the last dense layer because of the binary classification. The training process has been performed using TensorFlow framework for 1000 epochs. The cross-entropy cost function and the Adam optimization algorithm were used. CMSIS-NN optimized kernels for ARM Cortex-M have been used and 8-bit fixed-point quantization of the weights and activations was performed. The STM NUCLEO-L476RG generic development board was used. Power consumption was 16.5 mW, execution time of 4.01 ms, and memory footprint of 25.08 kB (text, BSS and data). The classification performance has been analyzed using both models, TensorFlow (32-bit floating point representation) and CMSIS-NN (8-bit fixed point implementation). They used for the test all the three divisions of the dataset: train, validation, and test. The classification performance decreased by 0.2%, 1.0%, and 0.2%, respectively. The CMSIS-NN model classification performance was of 80.9%, 76.4%, and 76.7%, respectively. In conclusion, an inference time of only 4 ms was obtained with 2.3 mW power consumption. Experiments show that the 8-bit fixed point representation does not significantly affect the performance, introducing a maximum 1% accuracy loss.
G. Crocioni et al. [
46] presented different ML algorithms to estimate the State of Health (SoH) and the maximum releasable capacity of Lithium-Ion (Li-Ion) batteries. They provide a comparison of these ML algorithms with a focus on Forward and Recurrent Neural Networks (FNNs and RNNs). These estimations can be useful for preventive battery replacement, reducing safety risks, and preventing critical failures. According to the authors, existing models are too large to run on microcontrollers, and therefore the following architectures have been analyzed: CNN, LSTM, GRU, CNN-LSTM, and CNN-GRU. The dataset used for training and testing is made available by NASA Ames Prognostics Center of Excellence (PCoE), which contains data related to measurements of voltage, current, temperature, capacity, and impedance of Li-Ion batteries. During the training process, Adam optimization algorithm and MSE loss function were used. A Random Forest (RF) model and an SVR model have been used as a baseline for the developed architectures. The SensorTile Wireless Industrial Node (STWIN) development kit based on the ARM Cortex-M4 MCU was used to run the trained neural networks. To convert the pre-trained architectures into an optimized ANSI C library, the STM32Cube.AI software tool was used, allowing performance analysis both on PC and MCU. To generate 8-bit integer quantized models, the same tool was used as well. They provide many details regarding quantization algorithm used, with the mention that for recursive layers (LSTM and GRU layers) quantization is not supported and their execution use floating point representation. Benchmarking was performed for the CNN model, comparing TensorFlow Lite for Microcontrollers (TFLM) and the STM32Cube.AI tools. Three different development boards have been used: Nucleo-H743ZI (480 MHz), Nucleo-F411 (100 MHz), and Nucleo-L4r5ZI (120 MHz). To evaluate the accuracy of the prediction, they used RMSE and MAE metrics. They demonstrated that Neural Networks (NNs) have better results than baseline models (RF and SVR). CNN GRU is the model with the best results compared to the other NNs. The maximum RMSE and MAE was 0.0488 and 0.0414, respectively. The total number of parameters for all the models has been specified, concluding that CNN GRU has almost the best results, exceeded only by the GRU model. The complexity of NN models has been evaluated in terms of RAM, flash memory usage, and MACC 32-bit floating point operations. From this point of view, the GRU model has the best results. In the next step, the models were converted to ANSI C code to evaluate the RMSE and MAE metrics. The performance after conversion remains unchanged. Quantization had a large improvement on RAM size and CPU cycles, however, also impacted the accuracy with 0.0334 additional RMSE and 0.0331 additional MAE. From the point of view of energy consumption, the quantized model is one order of magnitude better than the non-quantized models. More specifically, the inference energy consumption for the non-quantized CNN models is 399.079 nJ while for the quantized model it is 18.654 nJ. Additionally, they provide a comparison between STM32Cube.AI and TFLM in terms of inference time and memory consumption for both quantized and non-quantized models. In conclusion, it has been demonstrated that the results obtained using STM32Cube.AI outperform those obtained with TFLM.
B. Karg et al. [
47] use deep learning neural networks for mixed-integer model predictive control. The targeted application is the energy management system of a smart building. The dataset used for training was obtained from 500 different MPC runs. They divided the dataset between training (90%) and the evaluation set (10%). The frameworks used in order to design the DNN have been TensorFlow and Keras with Adam optimizer. Three different models have been trained: two shallow networks and one deep network. The authors show that the deep network performs better than the shallow networks by having a smaller training error and a reduced memory footprint. Therefore, the deep network architecture has been selected for further investigation. Because of the model simplicity, it was finally implemented on a microcontroller. The EdgeAI tool has been used to generate the C code. The microcontroller was based on ARM Cortex-M3 core with 96 kB of RAM, 512 kB of flash, and running with a frequency of 89 MHz. The network has only 5 hidden layers with 10 neurons per layer. The computation time was 2.9 ms and the memory footprint was only 35 kB. Differences between the usage of ReLU and tanh activation functions have been analyzed, concluding that the computation time is significantly longer (7.3 ms) and the code is larger (37.3 kB) using the tanh function due to the additional math libraries that were needed.
E. Torti et al. [
48] implemented a fall detection wearable system using LSTM Recurrent Neural Networks (RNNs) running on a microcontroller. Such a system is useful to monitor older adults for unintentional falls and to issue alert notifications to a remote monitoring system on positive. The authors started from three main requirements as follows: (1) permanent wireless connection shall be ensured for alert notifications, (2) the system shall be as small as possible and lightweight to avoid possible inconveniences, and (3) the system shall be a low power device as it is powered from a battery. These requirements were the basis for the need to implement a real-time fall detection system that performs computation directly on the embedded device. The SensorTile miniaturized board produced by STMicroelectronics has been selected as a suitable device for this application due to the low-power ARM Cortex-M4 core-based STM32L476JGY microcontroller and the additional onboard features available, such as the three-axial accelerometers. The microcontroller has 1 MB of flash memory and 128 kB of RAM memory. Single-precision floating-point arithmetic is used. This has been decided to avoid significant losses in precision that could be introduced by pruning or quantization techniques. The dataset used was SisFall, which is one of the common datasets made available for this application. This was manually labeled and divided into training and validation set (80% training set and 20% test set). The relevant classes that have been defined were FALLS, ALLERTS, and a Background Class (BKG) that covers normal activities that are not related to a fall. The network architecture consists of two LSTM cells with an inner dimension LS of 32 units for each cell. This has been designed using TensorFlow library, and the training procedure was performed on a DELL 5810 workstation. The results have been presented in terms of accuracy, specificity, and sensitivity. The overall accuracy obtained was 98%. A quantization approach has been tested using a technique called node quantization. The results showed an overall precision loss of more than 9%, concluding that the current technique is not feasible to use. The network has been tested on the SensorTile device and implemented using the CMSIS library on the microcontroller that works at a maximum frequency of 80 MHz. The required memory was 82 kB of the total memory of 128 kB available. To evaluate the power consumption, the STM32CubeMX Power Consumption Calculator has been used. The resulting current consumption was 5 mA and the estimated time for which the device can be active according to battery capacity was 20 h.
A. Faraone et al. [
49] converted an existing convolutional recurrent neural network designed to detect and classify cardiac arrhythmias from a single-lead electrocardiogram. It was desired to be compatible with a low power embedded device System-on-Chip nRF52, equipped with an ARM Cortex-M4 processing core. The paper is especially focused on the inference process and trade-offs between model complexity and performance degradation. They used CMSIS-NN optimized software library designed for implementing neural networks on ARM Cortex-M. The hardware platform was nRF52832 SoC, designed for IoT applications and medical wearable devices. The microcontroller runs at a frequency of 64 MHz and has 64 kB of RAM and 512 kB of FLASH memory. The dataset consists of 8528 single-lead ECG signal samples and was used as a reference dataset for the Computing in Cardiology 2017 Challenge. In summary, the architecture contains seven convolutional layers followed by a gated recurrent unit topology. The training was performed using Keras with the cross-entropy loss function and Adam optimizer. They summarize the main changes that have been performed on the original neural network model obtaining the total memory slightly less than 200 kB, using 8-bit fixed-point representation. The quantization technique was described with a focus mainly on the concept of defining the Q format, number of integer and fractional bits in order to achieve an efficient quantization. After training for 250 epochs the accuracy was 89.3% on the training set and 86.1% on the test set, while with fixed point implementation the accuracy was 85.7%. It has been concluded that sensitivity to noise is the most penalized metric. However, overall, a slight negative impact due to fixed-point quantization has been observed. On some metrics, also slight improvements were visible, for example: specificity metric for the normal rhythm class (0.002) or sensitivity for atrial fibrillation class (0.007). The overall memory footprint was around 210 kB, 195.6 kB for hard-coded data, and approximately 7 kB of RAM. The execution time for one inference was measured at 94.8 ms. Around 91 ms was necessary for the convolution part, 3.8 ms for GRU execution, and 28 µs for the fully connected layer. Moreover, the total number of network operations was measured at 33.98 MOps/s. With a power consumption of 20.65 mW, the resulting power efficiency was 1.64 GOps/s/W. Taking into account the idle time, which was significantly present in the final implementation, the efficiency achieved for the convolutional part alone is 0.124 GOps/s/W. In conclusion, in this work, the authors have demonstrated the applicability of resource-constraint microcontrollers in the medical area for arrhythmia detection case study.
5. Conclusions
Deep learning and deep neural networks are emerging as promising solutions for solving complex problems. Solving complex problems requires high computational capabilities and memory resources, so are traditionally designed to run on a large computer system around specialized hardware. However, recent research shows that simple applications can benefit from the deep learning paradigm and their edge computing implementation as well. Edge computing is the solution to many real-world problems that need to be solved soon. For instance, the automotive industry is using and developing prototypes using state-of-the-art hardware and software solutions for autonomous driving. Once these prototypes prove their ability to solve problems, the systems will have to run on real-world cars. At that stage, cost is necessary to be competitive in the market, and, using high performance computing solutions, the cost is high. The edge computing paradigm must be prepared with efficient and low-cost solutions while meeting specific requirements such as functional safety.
In this work, we provide a summary of what edge computing means in the context of low-cost/low-power applications. Here, the ARM Cortex-M processor represents one of the best possible candidates. More specifically, we summarize deep neural network implementations using ARM Cortex-M core-based microcontrollers. From the software perspective, the STM32Cube.AI support package, made available by STMicroelectronics for its 32-bit microcontroller series, represents one of the best freely available tools.
Implementing deep neural networks on embedded devices, such as microcontrollers, is a difficult task. This is mainly due to the computation and memory footprint constrains. For this reason, it is observed that developers are forced to customize existing architectures or even develop from scratch innovative models that better suit embedded processors. Optimization techniques such as quantization, pruning, and distillation are constantly evolving to achieve higher performance, and they are enabling developers to introduce state-of-the-art models of increasing complexity to the embedded domain. Ultimately, using an optimized hardware combined with optimized deep neural network architectures leads to maximum energy efficient systems.
Future work proposes to extend the study to a wider family of ARM cores, including, for example, deep learning applications running on Cortex-A type processors or even specialized Arm Ethos-N series processors for machine learning [
61].






{kind=link}
{kind=link}