
Enhancement of Underwater Images by CNN-Based Color Balance and Dehazing


Abstract
:1. Introduction
2. Literature Review
3. Fundamentals
3.1. Underwater Imaging
3.2. Convolutional Neural Network (CNN)
4. Underwater Image Enhancement by UGAN-Based Color Balance, CNN-Based Dehazing and Adaptive Contrast Enhancement
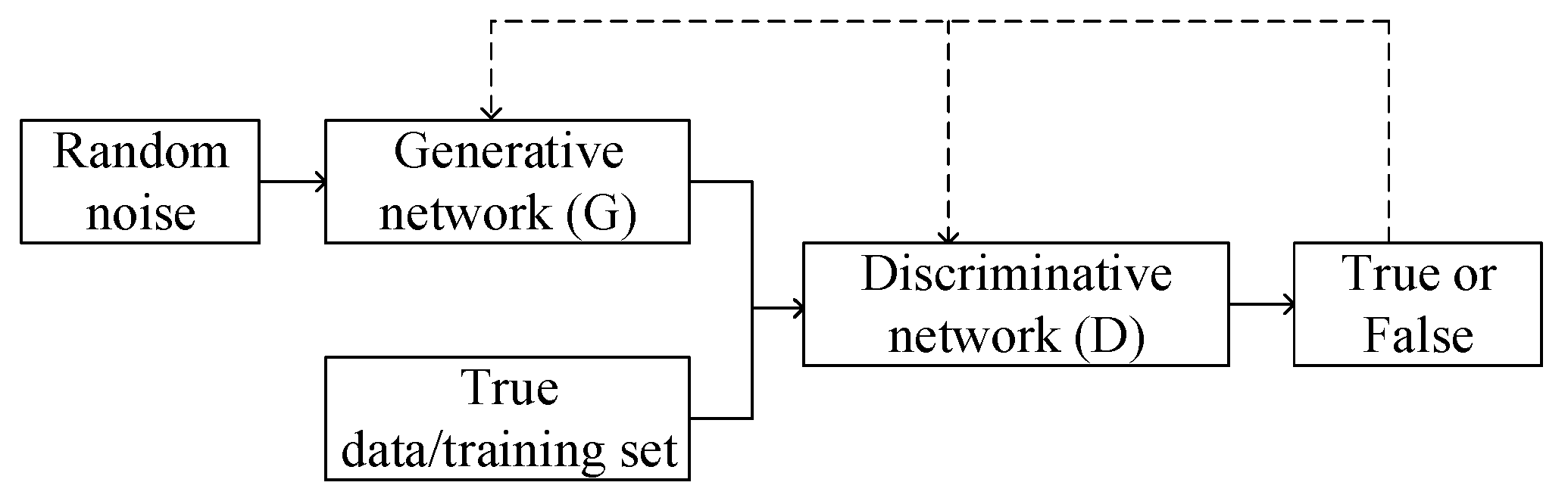
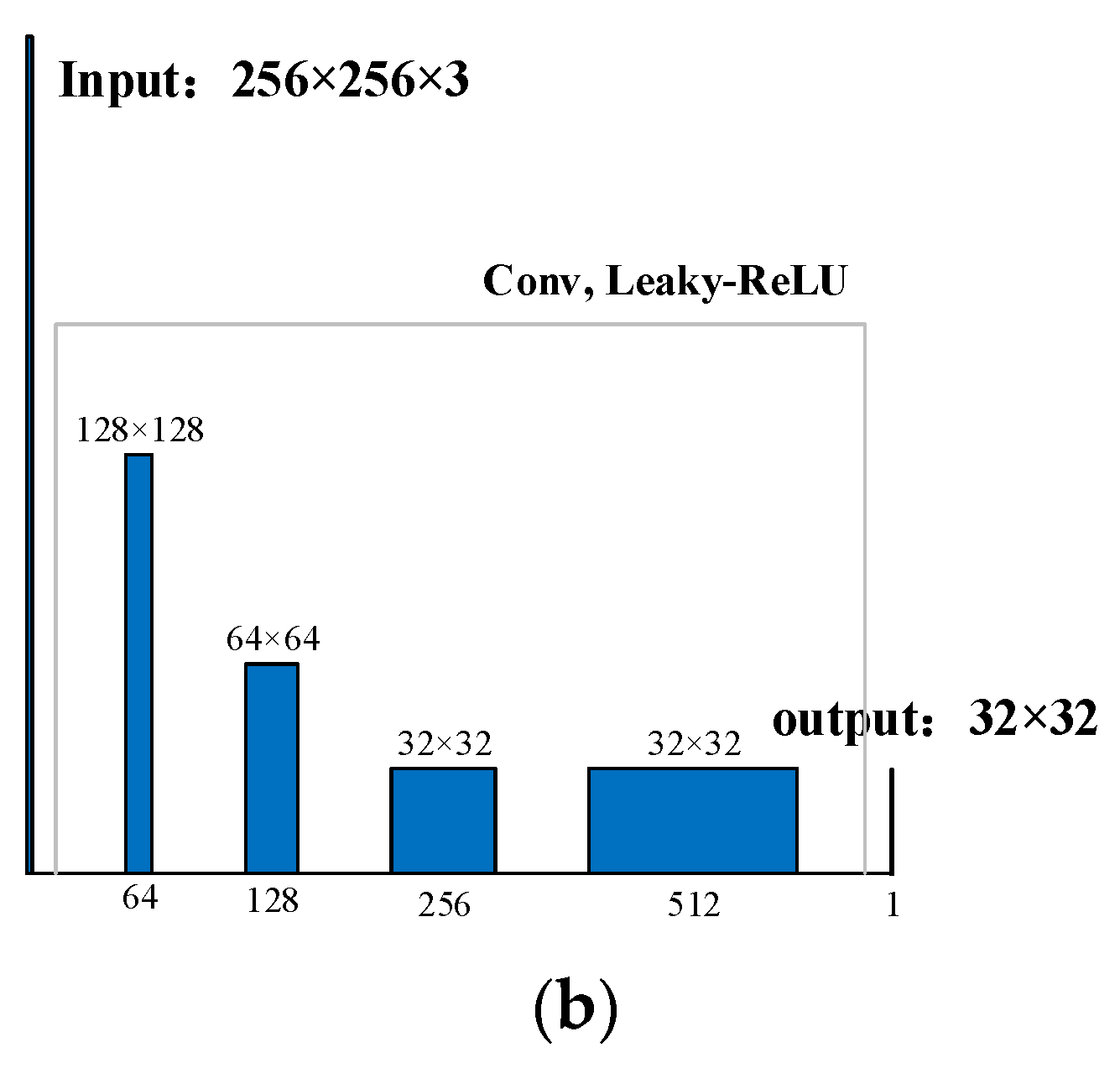
4.1. Color Balance by Underwater Generative Adversarial Network (UGAN)
4.2. CNN-Based Integrated Dehazing Model
4.3. Adaptive Contrast Improvement of Underwater Images
5. Results and Analysis
5.1. Subjective Vision
5.2. Ablation Experiments
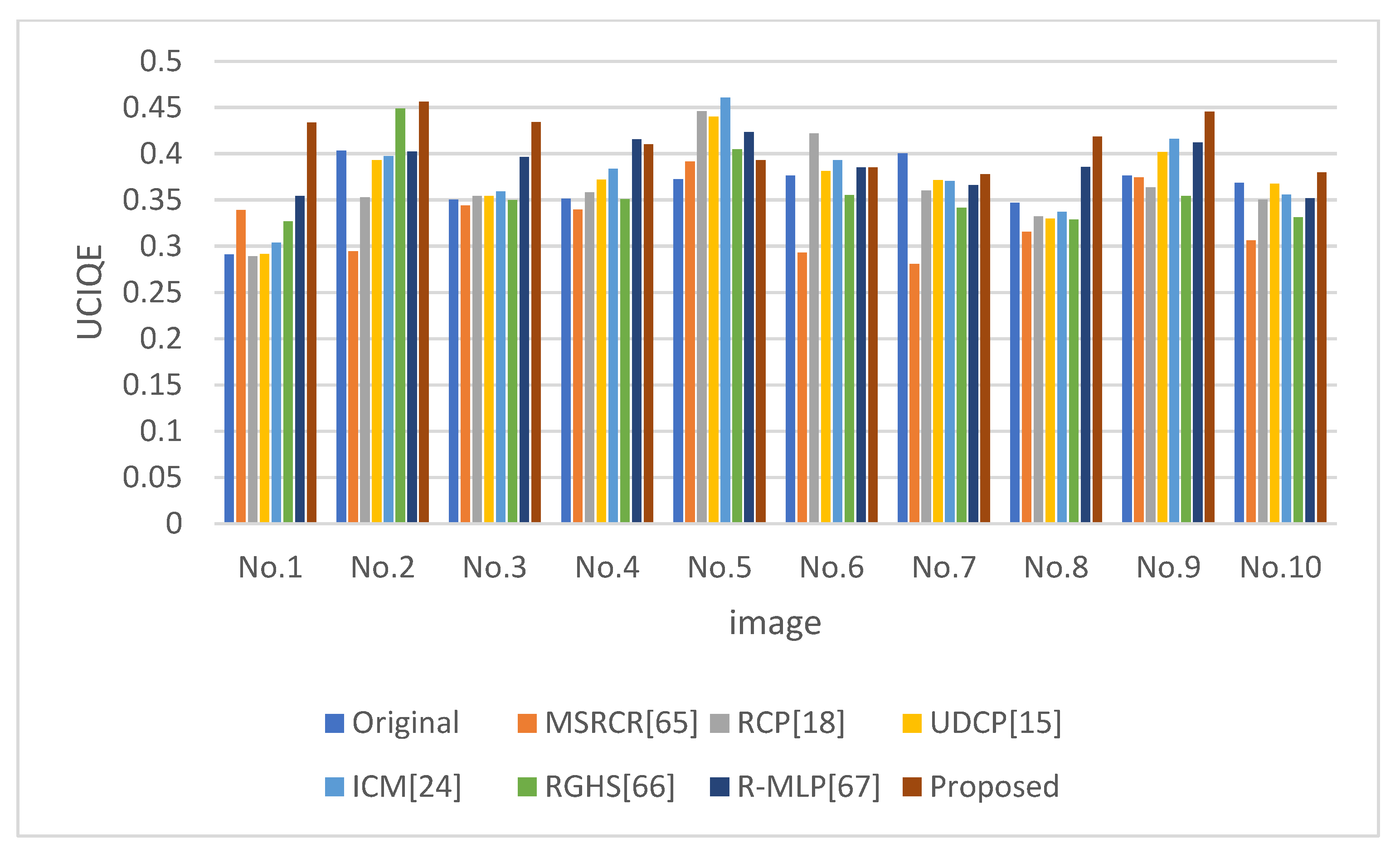
5.3. Quantitative Evaluation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Singh, H.; Adams, J.; Mindell, D.; Foley, B. Imaging underwater for archaeology. J. Field Archaeol. 2000, 27, 319–328. [Google Scholar]
- Boudhane, M.; Nsiri, B. Underwater image processing method for fish localization and detection in submarine environment. J. Vis. Commun. Image Represent. 2016, 39, 226–238. [Google Scholar] [CrossRef]
- Shi, H.; Fang, S.J.; Chong, B.; Qiu, W. An underwater ship fault detection method based on Sonar image processing. J. Phys. Conf. Ser. 2016, 679, 012036. [Google Scholar]
- Ahn, J.; Yasukawa, S.; Sonoda1, T.T.; Ura, T.; Ishii, K. Enhancement of deep-sea floor images obtained by an underwater vehicle and its evaluation by crab recognition. J. Mar. Sci. Technol. 2017, 22, 758–770. [Google Scholar] [CrossRef]
- Gu, L.; Song, Q.; Yin, H.; Jia, J. An overview of the underwater search and salvage process based on ROV. Sci. Sin. Inform. 2018, 48, 1137–1151. [Google Scholar] [CrossRef]
- Watanabe, J.-I.; Shao, Y.; Miura, N. Underwater and airborne monitoring of marine ecosystems and debris. J. Appl. Remote Sens. 2019, 13, 044509. [Google Scholar] [CrossRef]
- Powar, O.; Wagdarikar, N. A review: Underwater image enhancement using dark channel prior with gamma correction. Int. J. Res. Appl. Sci. Eng. Technol. 2017, 5, 421–426. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, L. Effects of temperature and salinity on light scattering by water. In Ocean Sensing and Monitoring II; SPIE: Washington, DC, USA, 2010; Volume 7678, pp. 247–252. [Google Scholar]
- Silver, M. Marine snow: A brief historical sketch. Limnol. Oceanogr. Bull. 2015, 24, 5–10. [Google Scholar] [CrossRef]
- He, D.; Seet., G. Divergent-beam Lidar imaging in turbid water. Opt. Laser Eng. 2004, 41, 217–231. [Google Scholar] [CrossRef]
- Ouyang, B.; Dalgleish, F.; Vuorenkoski, A.; Britton, W. Visualization and image enhancement for multistatic underwater laser line scan system using image-based rendering. IEEE J. Ocean. Eng. 2013, 38, 566–580. [Google Scholar] [CrossRef]
- Jaffe, J. Computer modeling and the design of optimal underwater imaging systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- Trucco, E.; Olmos-Antillon, A. Self-tuning underwater image restoration. IEEE J. Ocean. Eng. 2006, 31, 511–519. [Google Scholar] [CrossRef]
- Wang, N.; Qi, L.; Dong, J.; Fang, H.; Chen, X.; Yu, H. Two-stage underwater image restoration based on a physical model. In Proceedings of the Eighth International Conference on Graphic and Image Processing (ICGIP 2016), Tokyo, Japan, 29–31 October 2016; p. 10225. [Google Scholar]
- Wagner, B.; Nascimento, E.R.; Barbosa, W.V.; Campos, M.F.M. Single-shot underwater image restoration: A visual quality-aware method based on light propagation model. J. Vis. Commun. Image Represent. 2018, 55, 363–373. [Google Scholar]
- Shi, Z.; Feng, Y.; Zhao, M.; Zhang, E.; He, L. Normalized gamma transformation based contrast limited adaptive histogram equalization with color correction for sand-dust image enhancement. IET Image Process. 2020, 14, 747–756. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. 2011, 33, 2341–2353. [Google Scholar]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic red-channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Wang, B.; Cong, R.; Zhang, Y.; Wang, J. Single underwater image enhancement based on color cast removal and visibility restoration. J. Electron. Imaging 2016, 25, 033012. [Google Scholar] [CrossRef]
- Tang, Z.; Zhou, B.; Dai, X.; Gu, H. Underwater robot visual enhancements based on the improved DCP algorithm. Robot 2018, 40, 222–230. [Google Scholar]
- Xie, H.; Peng, G.; Wang, F.; Yang, C. Underwater image restoration based on background light estimation and dark channel prior. Acta Opt. Sin. 2018, 38, 18–27. [Google Scholar]
- Yu, H.; Li, X.; Lou, Q.; Lei, C.; Liu, Z. Underwater image enhancement based on DCP and depth transmission map. Multimed. Tools Appl. 2020, 79, 20373–20390. [Google Scholar] [CrossRef]
- Henke, B.; Vahl, M.; Zhou, Z. Removing color cast of underwater images through non-constant color constancy hypothesis. In Proceedings of the 2013 8th International Symposium on Image and Signal Processing and Analysis (ISPA), Trieste, Italy, 4–6 September 2014; pp. 20–24. [Google Scholar]
- Iqbal, K.; Abdul, S.; Talib, R.; Abdullah, Z. Underwater image enhancement using an integrated colour model. IAENG Int. J. Comput. Sci. 2007, 34, 239–244. [Google Scholar]
- Guraksin, G.; Deperlioglu, O.; Kose, U. A novel underwater image enhancement approach with wavelet transform supported by differential evolution algorithm. In Nature Inspired Optimization Techniques for Image Processing Applications; Springer: Cham, Switzerland, 2019; pp. 255–278. [Google Scholar]
- Tang, C.; von Lukas, U.; Vahl, M.; Wang, S.; Wang, Y.; Tan, M. Efficient underwater image and video enhancement based on Retinex. Signal Image Video Process. 2019, 13, 1011–1018. [Google Scholar] [CrossRef]
- Qiao, X.; Bao, J.; Zhang, H.; Zeng, L.; Li, D. Underwater image quality enhancement of sea cucumbers based on improved histogram equalization and wavelet transform. Inf. Process. Agric. 2017, 4, 206–213. [Google Scholar] [CrossRef]
- Ghani, A. Image contrast enhancement using an integration of recursive-overlapped contrast limited adaptive histogram specification and dual-image wavelet fusion for the high visibility of deep underwater image. Ocean Eng. 2018, 162, 224–238. [Google Scholar] [CrossRef]
- Ancuti, C.; Ancuti, C.O.; Haber, T.; Bekaert, P. Enhancing underwater images and videos by fusion. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 81–88. [Google Scholar]
- Mohan, S.; Simon, P. Underwater image enhancement based on histogram manipulation and multiscale fusion. Procedia Comput. Sci. 2020, 171, 941–950. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Cong, R.; Pang, Y.; Wang, B. Underwater image enhancement by dehazing with minimum information loss and histogram distribution prior. IEEE Trans. Image Process. 2016, 99, 5664–5677. [Google Scholar] [CrossRef]
- Xia, W.; Yang, P.; Wang, S.; Xu, B.; Liu, H. Underwater image enhancement based on red channel weighted compensation and gamma correction model. Opto-Electron. Adv. 2018, 1, 13–21. [Google Scholar]
- Wang, Y.; Yan, Y.; Ding, X.; Fu, X. Underwater Image Enhancement via L2 based Laplacian Pyramid Fusion. In Proceedings of the Oceans 2019 MTS/IEEE Seattle, Washington, DC, USA, 27–31 October 2019; pp. 1–4. [Google Scholar]
- Luo, W.; Duan, S.; Zheng, J. Underwater image restoration and enhancement based on a fusion algorithm with color balance, contrast optimization and histogram stretching. IEEE Access 2021, 9, 31792–31804. [Google Scholar] [CrossRef]
- Singh, M.; Vijay, L.; Parvez, F. Visibility enhancement and dehazing: Research contribution challenges and direction. Comput. Sci. Rev. 2022, 44, 00473. [Google Scholar] [CrossRef]
- Arif, Z.H.; Mahmoud, M.A.; Abdulkareem, K.H.; Mohammed, M.A.; Al-Mhiqani, M.N.; Mutlag, A.A.; Damaševičius, R. Comprehensive review of machine learning (ML) in image defogging: Taxonomy of concepts, scenes, feature extraction, and classification techniques. IET Image Process. 2022, 16, 289–310. [Google Scholar] [CrossRef]
- Manzo, M.; Simone, P. Voting in transfer learning system for ground-based cloud classification. Mach. Learn. Knowl. Extr. 2021, 3, 542–553. [Google Scholar] [CrossRef]
- Li, Y.; Lu, H.; Li, J.; Li, X.; Li, Y.; Serikawa, S. Underwater image de-scattering and classification by deep neural network. Comput. Electr. Eng. 2016, 54, 68–77. [Google Scholar] [CrossRef]
- Perez, J.; Attanasio, A.C.; Nechyporenko, N.; Sanz, P.J. A deep learning approach for underwater image enhancement. In Proceedings of the International Work-Conference on the Interplay between Natural and Artificial Computation, Corunna, Spain, 19–23 June 2017; pp. 183–192. [Google Scholar]
- Wang, Y.; Zhang, J.; Cao, Y.; Wang, Z. A deep CNN method for underwater image enhancement. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 1382–1386. [Google Scholar]
- Saeed, A.; Li, C.; Porikli, F. Deep underwater image enhancement. arXiv 2018, arXiv:1807.03528. [Google Scholar]
- Wang, K.; Hu, Y.; Chen, J.; Wu, X.; Zhao, X.; Li, Y. Underwater image restoration based on a parallel convolutional neural network. Remote Sens. 2019, 11, 1591. [Google Scholar] [CrossRef]
- Mhala, N.C.; Pais, A.R. A secure visual secret sharing (VSS) scheme with CNN-based image enhancement for underwater images. Vis. Comput. 2020, 37, 2097–2111. [Google Scholar] [CrossRef]
- Fabbri, C.; Islam, M.J.; Sattar, J. Enhancing underwater imagery using generative adversarial networks. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7159–7165. [Google Scholar]
- Li, J.; Skinner, K.A.; Eustice, R.M.; Johnson-Roberson, M. WaterGAN: Unsupervised generative network to enable real-time color correction of monocular underwater images. IEEE Robot. Autom. Lett. 2018, 3, 387–394. [Google Scholar] [CrossRef]
- Liu, P.; Wang, G.; Qi, H.; Zhang, C.; Zheng, H.; Yu, Z. Underwater image enhancement with a deep residual framework. IEEE Access 2019, 7, 94614–94629. [Google Scholar] [CrossRef]
- Guo, Y.; Li, H.; Zhuang, P. Underwater image enhancement using a multiscale dense generative adversarial network. IEEE J. Ocean. Eng. 2020, 45, 862–870. [Google Scholar] [CrossRef]
- Yang, M.; Hu, K.; Du, Y.; Wei, Z.; Sheng, Z.; Hu, J. Underwater image enhancement based on conditional generative adversarial network. Signal Process. Image Commun. 2020, 81, 115723. [Google Scholar] [CrossRef]
- Zhang, T.; Li, Y.; Takahashi, S. Underwater image enhancement using improved generative adversarial network. Concurr. Comput. Pract. Exp. 2022, 33, e5841. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Z.; Chen, B.M. IPMGAN: Integrating physical model and generative adversarial network for underwater image enhancement. Neurocomputing 2021, 453, 538–551. [Google Scholar] [CrossRef]
- Jia, D.; Wei, D.; Socher, R.; Li, L.; Kai, L.; Li, F. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–21 June 2009; pp. 248–255. [Google Scholar]
- Islam, M.J.; Xia, Y.; Sattar, J. Fast Underwater Image Enhancement for Improved Visual Perception. IEEE Robot. Autom. Lett. 2020, 5, 3227–3234. [Google Scholar] [CrossRef]
- Mclean, J.W.; Voss, K.J. Point spread function in ocean water: Comparison between theory and experiment. Appl. Opt. 1991, 30, 2027–2030. [Google Scholar] [CrossRef] [PubMed]
- Carlevaris-Bianco, N.; Mohan, A.; Eustice, R.M. Initial results in underwater single image dehazing. In Proceedings of the Oceans 2010 Mts/IEEE Seattle, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar]
- Wen, H.; Tian, Y.; Huang, T.; Gao, W. Single underwater image enhancement with a new optical model. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013; pp. 753–756. [Google Scholar]
- Chao, L.; Wang, M. Removal of water scattering. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Bali Island, Indonesia, 26–29 March 2010; Volume 2, pp. 35–39. [Google Scholar]
- Chiang, J.Y.; Chen, Y.-C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2012, 21, 1756–1769. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.-T.; Cosman, P.C. Underwater image restoration based on image blurriness and light absorption. IEEE Trans. Image Process. 2017, 26, 1579–1594. [Google Scholar] [CrossRef]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A rapid scene depth estimation model based on underwater light attenuation prior for underwater image restoration. Adv. Multimed. Inf. Process. 2018, 11164, 678–688. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. Adv. Neural Inf. Process. Syst. 2014, 3, 2672–2680. [Google Scholar] [CrossRef]
- Xie, Q.S. Research on the Method of Converting Color Image to Gray Image; Lanzhou University: Lanzhou, China, 2016. [Google Scholar]
- Wu, X. A Linear Programming Approach for Optimal Contrast-Tone Mapping. IEEE Trans. Image Process. 2011, 20, 1262–1272. [Google Scholar]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor segmentation and support inference from rgbd images. In European Conference on Computer Vision; Springer: Berlin/Heidelbergpages, Germany, 2012; pp. 746–760. [Google Scholar]
- Liu, R.; Fan, X.; Zhu, M.; Hou, M.; Luo, Z. Real-World underwater enhancement: Challenges, benchmarks, and solutions under natural light. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 4861–4875. [Google Scholar] [CrossRef]
- Rahman, Z.U.; Jobson, D.J.; Woodell, G.A. Retinex Processing for Automatic Image Enhancement. J. Electron. Imaging 2004, 13, 100–110. [Google Scholar]
- Huang, D.; Yan, W.; Wei, S.; Sequeira, J.; Mavromatis, S. Shallow-water Image Enhancement Using Relative Global Histogram Stretching Based on Adaptive Parameter Acquisition. In Proceedings of the International Conference on Multimedia Modeling, Bangkok, Thailand, 5–7 February 2018; pp. 453–465. [Google Scholar]
- Zhang, T.T.; Li, Y.; Li, Y.; Li, B.; Lu, H. Underwater image enhancement using Retinex and multilayer perceptron. In Proceedings of the 4th International Symposium on Artificial Intelligence and Robotics, Daegu, Korea, 20–24 August 2019; pp. 1–12. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Time (s) |
|---|---|
| MSRCR [65] | 56.76 |
| RCP [18] | 77.03 |
| UDCP [15] | 84.57 |
| ICM [24] | 118.83 |
| RGHS [66] | 155.89 |
| R-MLP [67] | 123.82 |
| Proposed | 167.56 |
| Image | Original | MSRCR [65] | RCP [18] | UDCP [15] | ICM [24] | RGHS [66] | R-MLP [67] | Proposed |
|---|---|---|---|---|---|---|---|---|
| No.1 | 5.3081 | 7.4120 | 6.0984 | 6.2435 | 6.7897 | 10.2875 | 17.2354 | 25.4847 |
| No.2 | 15.1314 | 14.0953 | 16.3356 | 15.5865 | 15.8495 | 20.0559 | 27.5491 | 36.8800 |
| No.3 | 10.6724 | 12.9316 | 14.3161 | 14.9913 | 15.8461 | 17.4935 | 28.5648 | 33.8563 |
| No.4 | 6.4623 | 8.2318 | 7.2596 | 7.7552 | 8.7491 | 7.8784 | 17.88631 | 22.0955 |
| No.5 | 7.8397 | 10.7915 | 10.9258 | 10.9650 | 13.0286 | 11.1871 | 19.5689 | 22.8650 |
| No.6 | 5.2668 | 8.5472 | 7.8924 | 7.4822 | 9.2979 | 7.8364 | 14.1568 | 19.4065 |
| No.7 | 14.9364 | 15.6319 | 16.4253 | 17.2833 | 17.6971 | 16.8500 | 25.7612 | 32.9018 |
| No.8 | 11.2983 | 14.4708 | 13.9546 | 14.4396 | 15.7776 | 17.2405 | 21.6387 | 29.1649 |
| No.9 | 10.3155 | 16.1995 | 10.2866 | 10.7759 | 13.7391 | 10.7838 | 17.3652 | 20.6239 |
| No.10 | 5.2029 | 7.4389 | 5.3538 | 4.9656 | 5.4576 | 5.3483 | 7.5813 | 9.4337 |
| Image | Original | MSRCR [65] | RCP [18] | UDCP [15] | ICM [24] | RGHS [66] | R-MLP [67] | Proposed |
|---|---|---|---|---|---|---|---|---|
| No.1 | 2.6423 | 5.5311 | 3.8158 | 3.9434 | 4.3340 | 6.9506 | 8.6724 | 14.9875 |
| No.2 | 11.4476 | 7.9984 | 12.8501 | 12.0324 | 11.6766 | 14.8117 | 20.6825 | 27.1891 |
| No.3 | 7.2113 | 9.5290 | 10.0930 | 10.4506 | 9.5695 | 12.2144 | 17.3654 | 23.4287 |
| No.4 | 4.1082 | 5.9081 | 5.0925 | 5.4805 | 5.7546 | 5.5310 | 8.3642 | 12.4997 |
| No.5 | 4.6157 | 7.6744 | 7.3803 | 7.3931 | 7.4815 | 7.5037 | 9.3684 | 14.1172 |
| No.6 | 2.7305 | 5.4254 | 5.3033 | 5.0539 | 4.7643 | 5.2895 | 6.8762 | 10.4021 |
| No.7 | 10.9880 | 9.9088 | 12.5353 | 13.0484 | 12.2145 | 12.7762 | 19.3653 | 25.0020 |
| No.8 | 8.1085 | 10.2638 | 10.4221 | 10.7476 | 10.4786 | 12.8594 | 15.6428 | 20.8428 |
| No.9 | 5.5421 | 6.6848 | 6.0041 | 5.6982 | 6.2871 | 8.8941 | 9.5842 | 11.6465 |
| No.10 | 2.5368 | 4.2125 | 2.4199 | 2.1152 | 2.7483 | 2.4453 | 4.6843 | 5.1009 |
| Image | Original | MSRCR [65] | RCP [18] | UDCP [15] | ICM [24] | RGHS [66] | R-MLP [67] | Proposed |
|---|---|---|---|---|---|---|---|---|
| No.1 | 0.2912 | 0.3393 | 0.2889 | 0.2917 | 0.3037 | 0.3267 | 0.3543 | 0.4338 |
| No.2 | 0.4033 | 0.2944 | 0.3530 | 0.3930 | 0.3973 | 0.4491 | 0.4023 | 0.4562 |
| No.3 | 0.3504 | 0.3439 | 0.3546 | 0.3545 | 0.3593 | 0.3499 | 0.3964 | 0.4343 |
| No.4 | 0.3513 | 0.3395 | 0.3581 | 0.3720 | 0.3839 | 0.3509 | 0.4156 | 0.4104 |
| No.5 | 0.3723 | 0.3914 | 0.4463 | 0.4402 | 0.4608 | 0.4047 | 0.4236 | 0.3933 |
| No.6 | 0.3765 | 0.2932 | 0.4222 | 0.3815 | 0.3932 | 0.3551 | 0.3851 | 0.3852 |
| No.7 | 0.4006 | 0.2809 | 0.3603 | 0.3714 | 0.3707 | 0.3415 | 0.3659 | 0.3780 |
| No.8 | 0.3468 | 0.3158 | 0.3323 | 0.3300 | 0.3371 | 0.3287 | 0.3857 | 0.4188 |
| No.9 | 0.3766 | 0.3743 | 0.3638 | 0.4021 | 0.4160 | 0.3544 | 0.4123 | 0.4457 |
| No.10 | 0.3685 | 0.3062 | 0.3502 | 0.3677 | 0.3560 | 0.3312 | 0.3519 | 0.3797 |
| Image | Original | MSRCR [65] | RCP [18] | UDCP [15] | ICM [24] | RGHS [66] | R-MLP [67] | Proposed |
|---|---|---|---|---|---|---|---|---|
| No.1 | 5.8674 | 6.5304 | 6.4659 | 6.5056 | 6.5712 | 7.4107 | 7.0365 | 7.5500 |
| No.2 | 7.2914 | 6.9136 | 7.4504 | 7.3393 | 7.3353 | 7.6421 | 7.5383 | 7.3194 |
| No.3 | 6.6303 | 6.7505 | 7.1167 | 7.0985 | 7.0791 | 7.3096 | 7.6853 | 7.6887 |
| No.4 | 7.0890 | 7.2488 | 7.4661 | 7.5578 | 7.5562 | 7.5314 | 7.6695 | 7.7171 |
| No.5 | 6.9445 | 7.4199 | 7.5348 | 7.5197 | 7.5327 | 7.4902 | 7.8631 | 7.6420 |
| No.6 | 6.4370 | 7.1931 | 7.3684 | 7.2275 | 7.1261 | 7.2719 | 7.3627 | 7.4410 |
| No.7 | 7.2052 | 6.8577 | 7.3754 | 7.4174 | 7.4080 | 7.3312 | 7.7261 | 7.8021 |
| No.8 | 6.9133 | 7.0229 | 7.2435 | 7.2510 | 7.2246 | 7.4810 | 7.5362 | 7.6588 |
| No.9 | 6.7553 | 6.3295 | 7.2502 | 7.0300 | 6.9953 | 6.6903 | 7.5382 | 7.4103 |
| No.10 | 7.1588 | 7.5891 | 6.9706 | 7.2512 | 7.2924 | 7.4022 | 7.3696 | 7.4961 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Luo, W.; Duan, S. Enhancement of Underwater Images by CNN-Based Color Balance and Dehazing. Electronics 2022, 11, 2537. https://doi.org/10.3390/electronics11162537
Zhu S, Luo W, Duan S. Enhancement of Underwater Images by CNN-Based Color Balance and Dehazing. Electronics. 2022; 11(16):2537. https://doi.org/10.3390/electronics11162537
Chicago/Turabian StyleZhu, Shidong, Weilin Luo, and Shunqiang Duan. 2022. "Enhancement of Underwater Images by CNN-Based Color Balance and Dehazing" Electronics 11, no. 16: 2537. https://doi.org/10.3390/electronics11162537