1. Introduction
A target can be resolved into several discrete physical scatterers that appear in radar range cells for a high-resolution radar (HRR), which is regarded as a distributed target. Returned signals for HRR convey abundant target information, and they fluctuate less than that of low-range resolution radars. Therefore, HRRs can significantly enhance the target detection performance [
1,
2]. However, the detection strategies of the point-target may fail in practical high-resolution radar systems [
3].
Distributed target detection has been extensively investigated in recent years, such as the adaptive detection of distributed targets in homogeneous environments [
4]. In [
5], the time-frequency distribution features of two adjacent echoes are utilized for target detection. By adding a general window function to calculate the cross S-method (CSM), it can efficiently detect targets with a high velocity, even if the adjacent radar high-resolution range profiles (HRRPs) are weakly correlated. By compensating for linear and quadratic phase errors [
6], a waveform contrast-based constant false-alarm rate (CFAR) detector is proposed to realize the distributed radar target detection [
7]. In [
8], a persymmetric adaptive matched filter (perAMF) detector is proposed for the distributed target detection in Gaussian clutter, where the clutter covariance matrix is unknown. Numerical examples show that the perAMF detector still has good detection performance even though the training data is limited. In [
9], by exploiting a priori knowledge of the clutter covariance matrix, an effective detection algorithm is proposed.
However, the assumption of the Gaussian random variable (RV) may no longer be met for the background clutter in HRRs. More specifically, the clutter can be described as non-Gaussian observations, which are suitable to be modeled by a spherically invariant random vector (SIRV) [
10,
11]. Recently, the adaptive detection of distributed targets in non-Gaussian clutter has been an active research topic in the radar community. For instance, in [
12], based on the assumption of knowing the disturbance covariance matrix, an approximate generalized likelihood ratio test (GLRT) -based detector is designed. Similarly, a modified adaptive detector based on GLRT is devised in [
13]. However, a priori knowledge about the disturbance covariance matrix in some complex electromagnetic environments is in general unknown. A detection method based on the volume cross-correlation function is proposed to solve this problem, without resorting to a priori knowledge about the disturbance covariance matrix [
14]. However, its performance can be obtained by resorting to the basis vectors of the signal subspace, which is computationally burdensome.
The detection performance of distributed targets in non-Gaussian clutter depends not only on the detection algorithms but also on the performance of clutter compression. For instance, the space-time adaptive processing (STAP) technique plays a significant role in suppressing the sea/ground clutter by the co-development of degrees-of-freedom (DOFs) in both spatial and temporal domains. However, the performance of the traditional STAP technique may greatly degrade in heterogeneous clutter environments. To address this problem, several detection methods based on the estimation of the clutter covariance matrix (CCM) are devised [
15,
16]. However, the detection performances of the aforementioned methods significantly degraded when prior assumptions on clutter echoes deviate from the real clutter environments. To solve the problem, a robust detection method for STAP applications based on the volume cross-correlation function (VCF) is proposed and it does not need to estimate the clutter CCM. However, when the velocities of moving targets are unknown, or all the targets have different velocities, this method needs to slide the window with an unknown length along all the range axis to select the training sample matrix, which results in a huge computational burden [
17].
In essence, target detection can be considered a binary classification task, and detection based on machine learning techniques has drawn much attention in recent several years. Amongst those techniques, deep learning techniques are being used as radar detectors with success [
18]. For instance, in [
19], the long short-term memory (LSTM) algorithm is used to achieve target detection with remarkable precision, even for very low SCR ratios. In [
20], a dual neural network detection scheme is proposed, in which the first neural net is used to filter out noisy images, and the second neural net is used to realize target detection and classification by extracting fast-time and slow-time information. In [
21], to lower the false alarm rate while maintaining the detection probability, an artificial neural network is proposed after applying a CFAR algorithm. However, those methods require a larger amount of training samples. Moreover, in general, a great increment in the number of samples leads to an increase in the training time [
22]. To solve this problem, traditional machine learning techniques may be an alternative approach. For instance, in [
23], a k-nearest neighbor (KNN)-based detector is designed to detect targets in non-Gaussian noise. In [
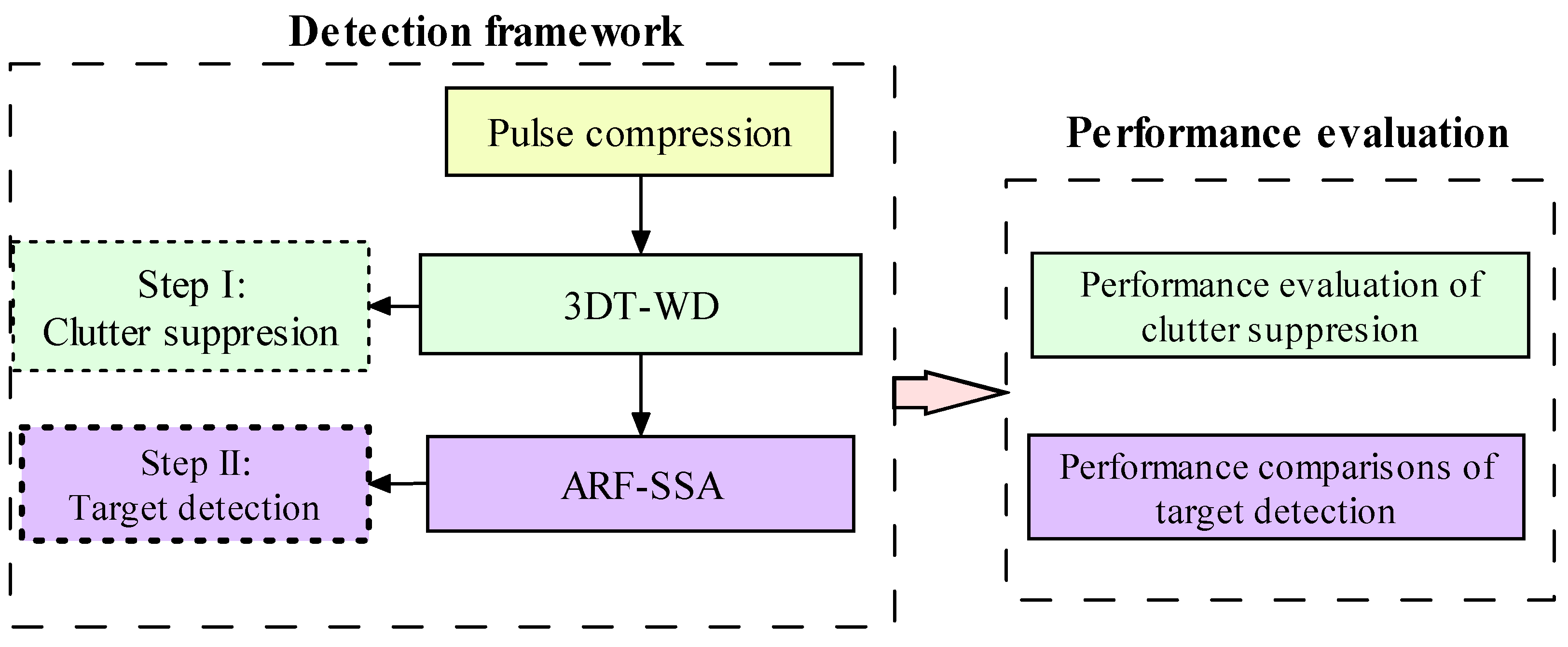
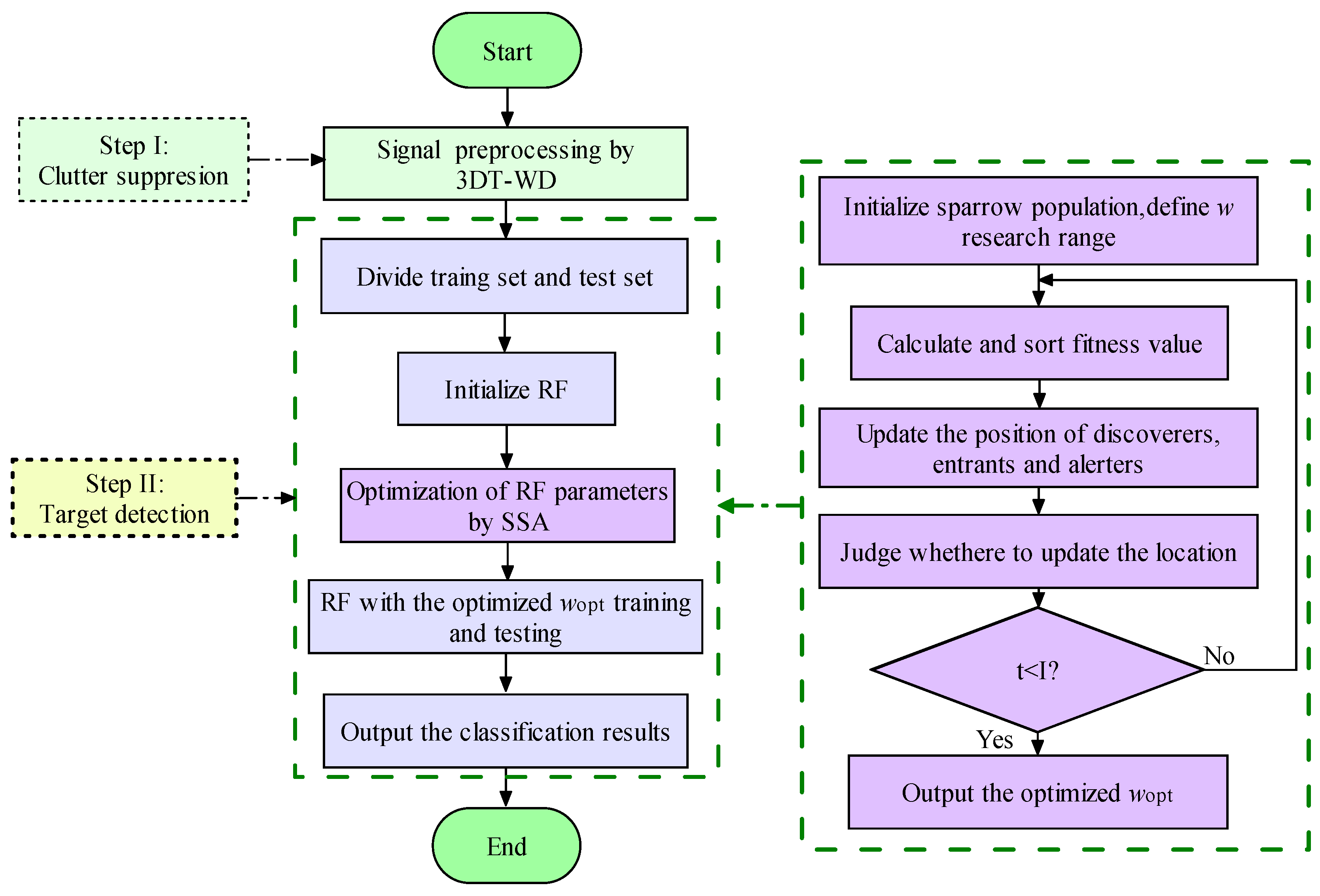
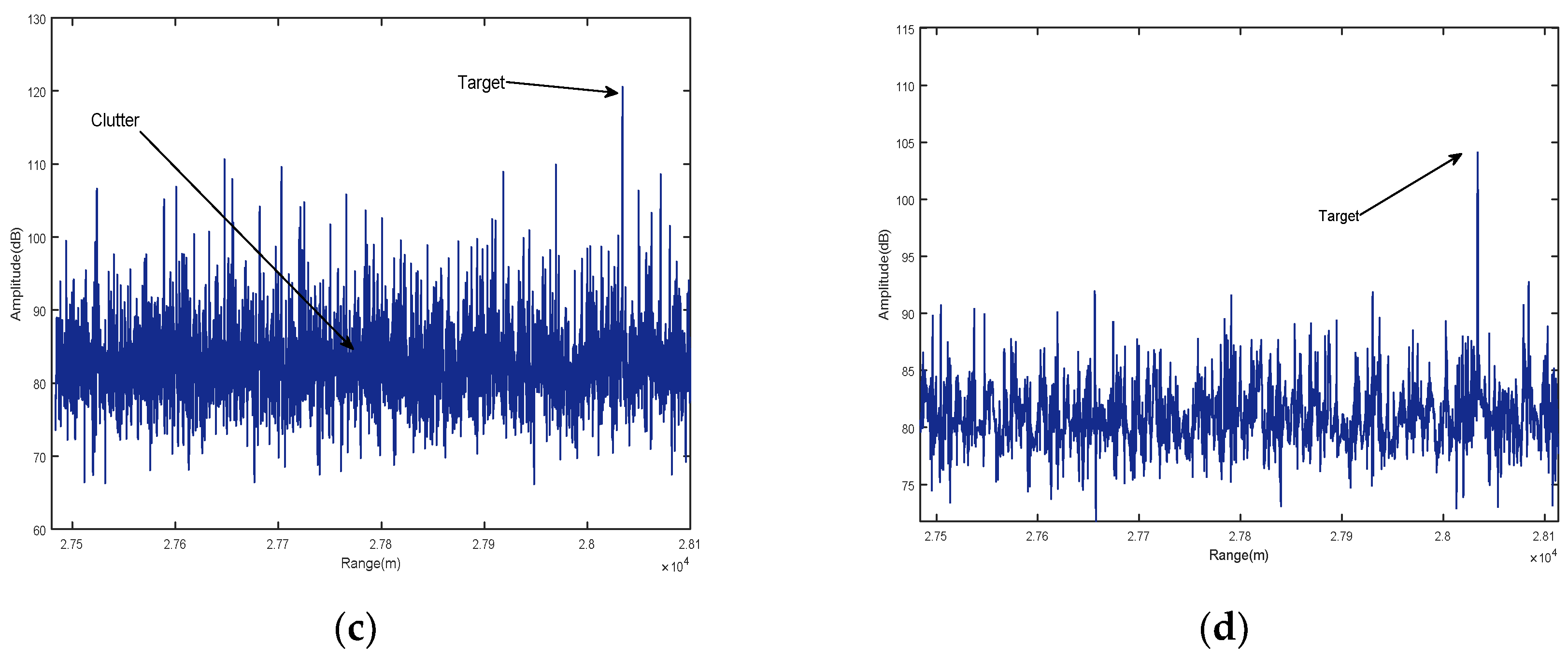
24], based on the features of the returned signals in the time and frequency domains, a support vector machine (SVM) is implemented to detect small sea-surface targets. Motivated by STAP and machine learning technologies, we propose a two-step scheme by integrating the signal processing and machine learning techniques to improve the performance of detecting distributed targets in non-Gaussian noise, modeled as the sum of K-distributed clutter plus thermal noise. Firstly, the mixed method by combining 3DT space-time adaptive processing with wavelet denoising (3DT-WD) is utilized to improve the output signal-to-clutter plus-noise ratio before target detection. Second but more importantly, a novel detection method based on random forest optimized with the sparrow search algorithm (RF-SSA) is proposed. The experiment results show that the proposed RF-SSA can achieve better detection performance than several peer methods. The proposed RF-SSA framework is illustrated in
Figure 1. The major innovations of this paper can be summarized as follows:
The proposed RF-SSA is an adaptive detection method, which solves the unbalance between detection probability and efficiency of the traditional RF, without any prior knowledge.
We tested if the 3DT-WD makes an improvement in the output signal-to-clutter plus-noise ratio (SCNR) and detection performance.
Comprehensive analyses, including parameter determination, such as the number of decision trees of RF optimized by the SSA, together with the performance compared to the other related methods, are also evaluated.
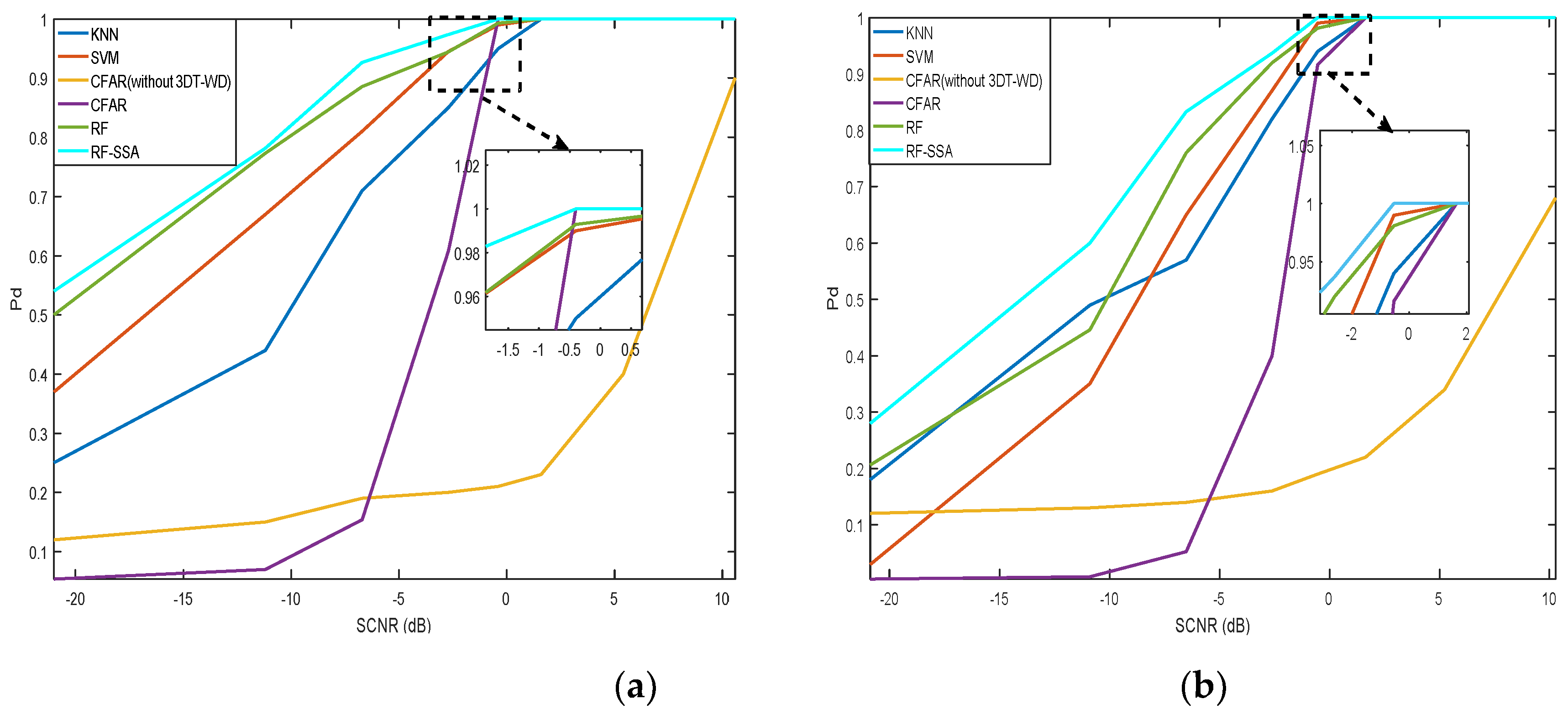
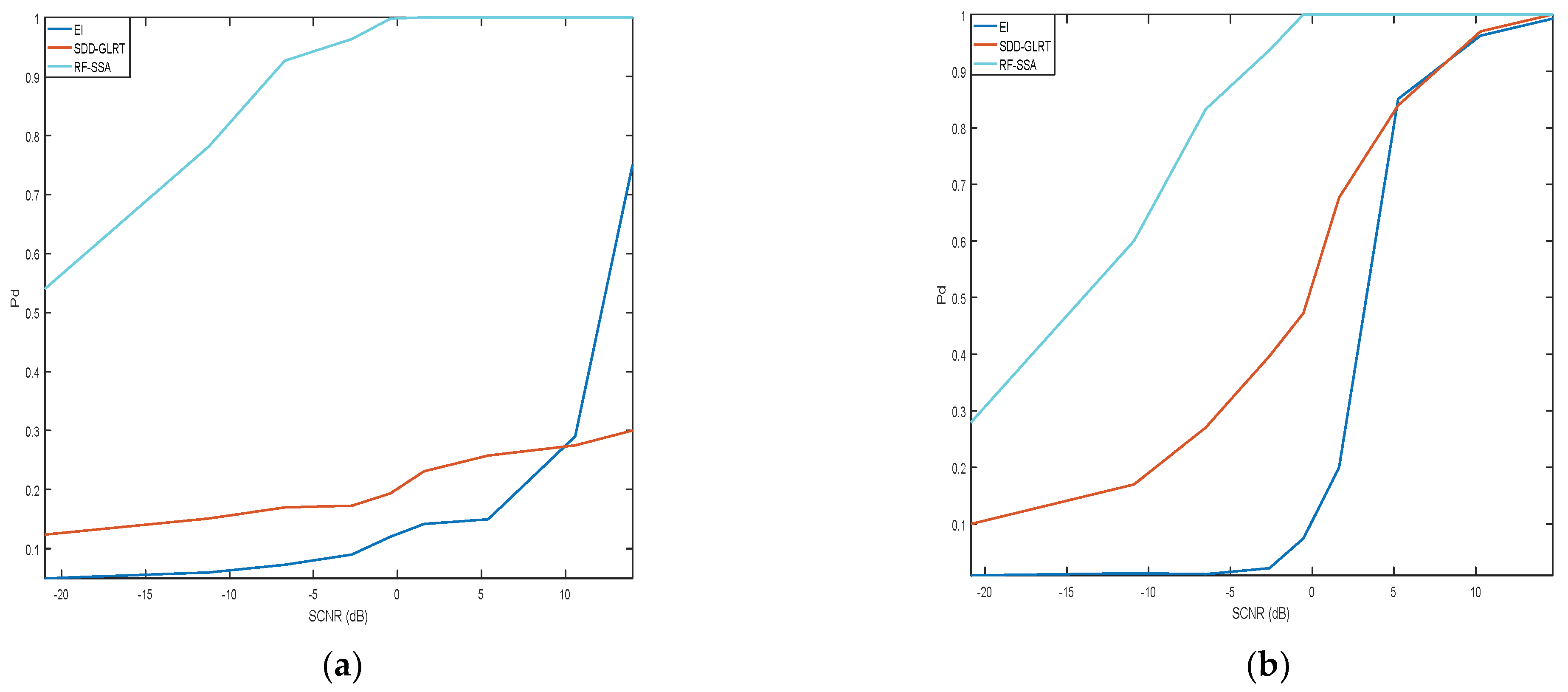
The proposed RF-SSA can achieve better or more competitive performance in terms of detection probability and area under the receiver operating characteristic curve (AUC), compared to several peer methods. Additionally, the RF-SSA is more robust for the shape parameter of the clutter distribution compared to the scatterer density-dependent GLRT (SDD-GLRT) and energy integration (EI) detectors.
The main content of this paper is organized as follows. In
Section 2, the detection problem is described. Then, in
Section 3, the proposed detector is designed. In
Section 4, numerical simulations are conducted for performance evaluation. Finally,
Section 5 concludes this paper.
2. Problem Formulation
The target detection with an airborne radar system is carried out in this paper. It is assumed that received data are collected from the N-sensor radar system and the targets are completely contained within the received data. Radar returns denote the space-time data in the cell under test, and M is the number of pulses in a coherent processing interval (CPI).
The distributed target detection problem can be expressed in the following binary hypothesis:
where the received data
(
) are called the primary data from the
t-th radar distributed cell, and
D is the number of range cells occupied by the target.
(
) are the second data from the
t-th range cell.
,
, and
denote the target returns, clutter, and thermal noise, respectively. Specifically,
(
) is modeled as zero-mean white Gaussian noise.
(
) can be modeled as K-distribution clutter,
and
are the texture and speckle parts of the clutter, respectively.
follows a complex Gaussian distribution, with zero mean and speckle covariance matrix
. The texture
follows a Gamma distribution with scale parameter
and shape parameter
v, and it represents the characteristics of the observed scene. The probability density function (PDF) of the texture part
is
where
is the gamma function.
PDF of clutter is given by
where
denotes a modified Bessel function of the second kind and shape parameter
v can control the tails of the PDF, i.e., the clutter is locally Gaussian if shape parameter
v + ∞.
5. Conclusions and Future Work
In this paper, we propose a novel RF-SSA to detect distributed targets in non-Gaussian noise, modeled as the sum of K-distributed clutter plus thermal noise. The proposed RF-SSA can adaptively solve the unbalance problems between detection probability and efficiency of the traditional RF, without any prior knowledge. Moreover, the experimental results have verified that our proposed method outperforms several existing methods under different clutter environments.
Although the proposed method can greatly improve detection efficiency with respect to the traditional RF, it is unable to achieve real-time target detection. To alleviate computation load, feature extraction methods, for instance t-distributed random neighborhood embedding, principal component analysis, maximal information coefficient, etc., can be used before target detection.
In this paper, we assume that the problem of detecting distributed targets is investigated under a fixed CNR. However, the CNR in realistic scenarios is various and uncertain. Thus, future work will examine the performance of the proposed detector in practical application.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}