
Research and Application of MPPT Control Strategy Based on Improved Slime Mold Algorithm in Shaded Conditions

Abstract
:1. Introduction
2. Partial Shading and Photovoltaic Systems
2.1. Photovoltaic Model and Characteristics
2.2. System Description
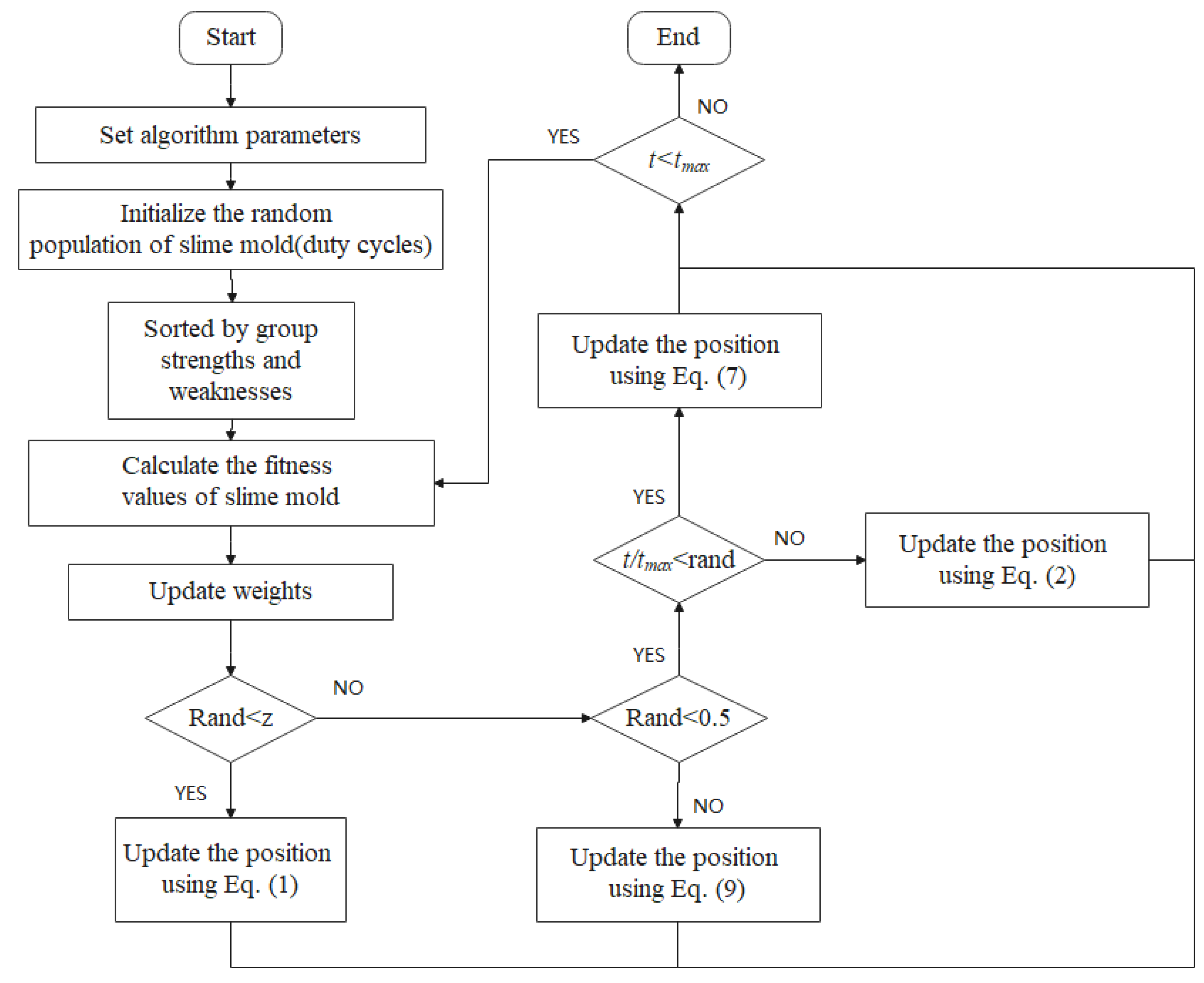
3. Model Construction of GMPP Control Algorithm Based on the Improved Slime Mold Algorithm
3.1. Inspiration
3.2. Approaching Food
3.3. Wrapping Food
3.4. Acquiring Food
- Initialize the population and set the corresponding parameters;
- Calculate the fitness values and sort them;
- Update the population position;
- Calculate the fitness value and update the optimal position;
- If the output performance indicators do not meet the requirements, steps 2–5 would be repeated.
3.5. Improved Slime Mold Algorithm in Shaded Photovoltaic System
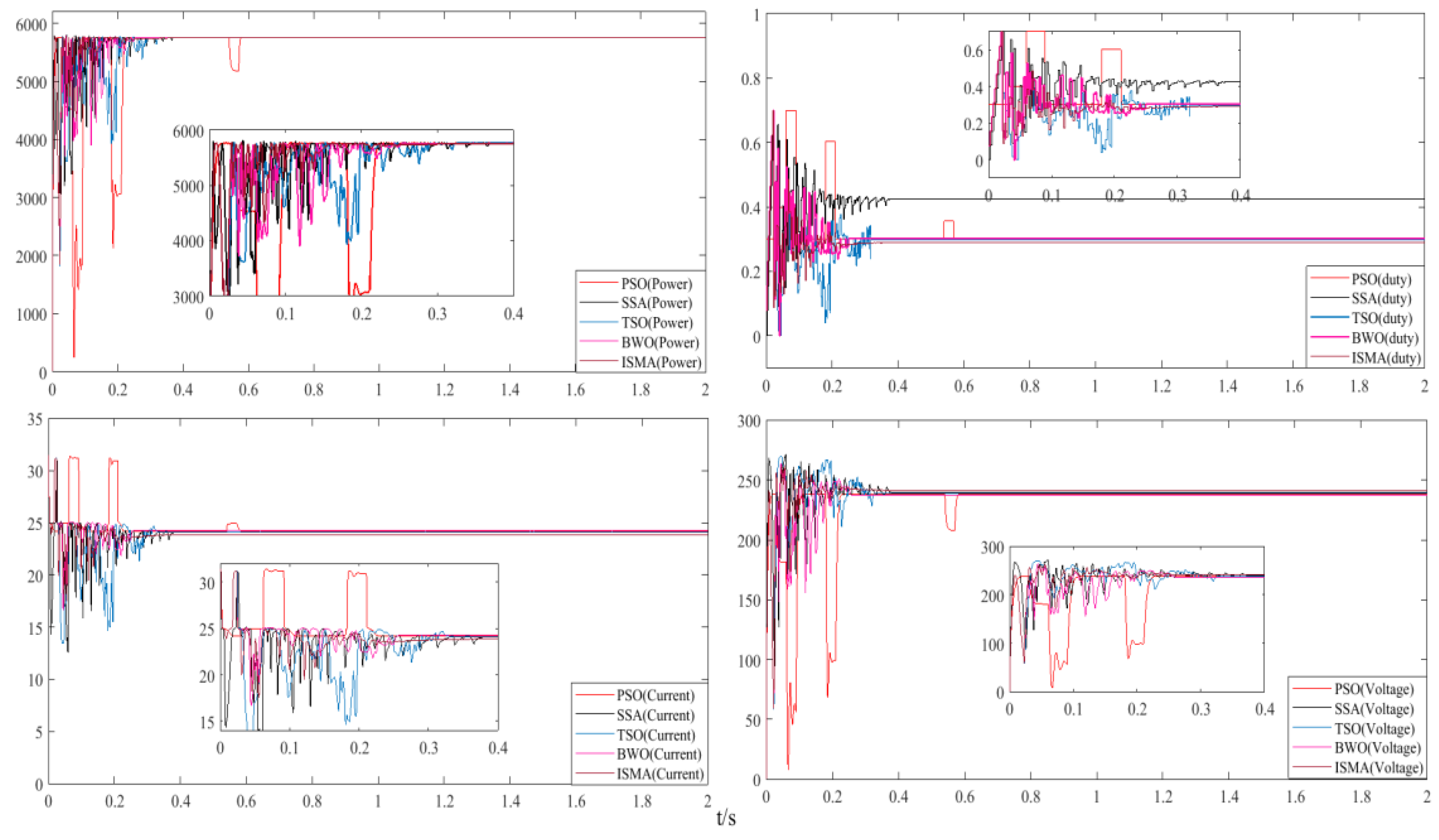
4. Simulation Analysis
- Mode 1: PV panel radiance is 1000/400/800 W/m2, the global maximum output power of PV power generation in this mode is 5759 W;
- Mode 2: PV panel radiance is 300/500/700 W/m2, through observing the P–V characteristic curve, we see the global maximum power point is 2860 W;
- Mode 3: The radiance is set to 200/400/600 W/m2, this case simulates the power generation process with a large shading area, the global maximum power tracking point is 2253 W.
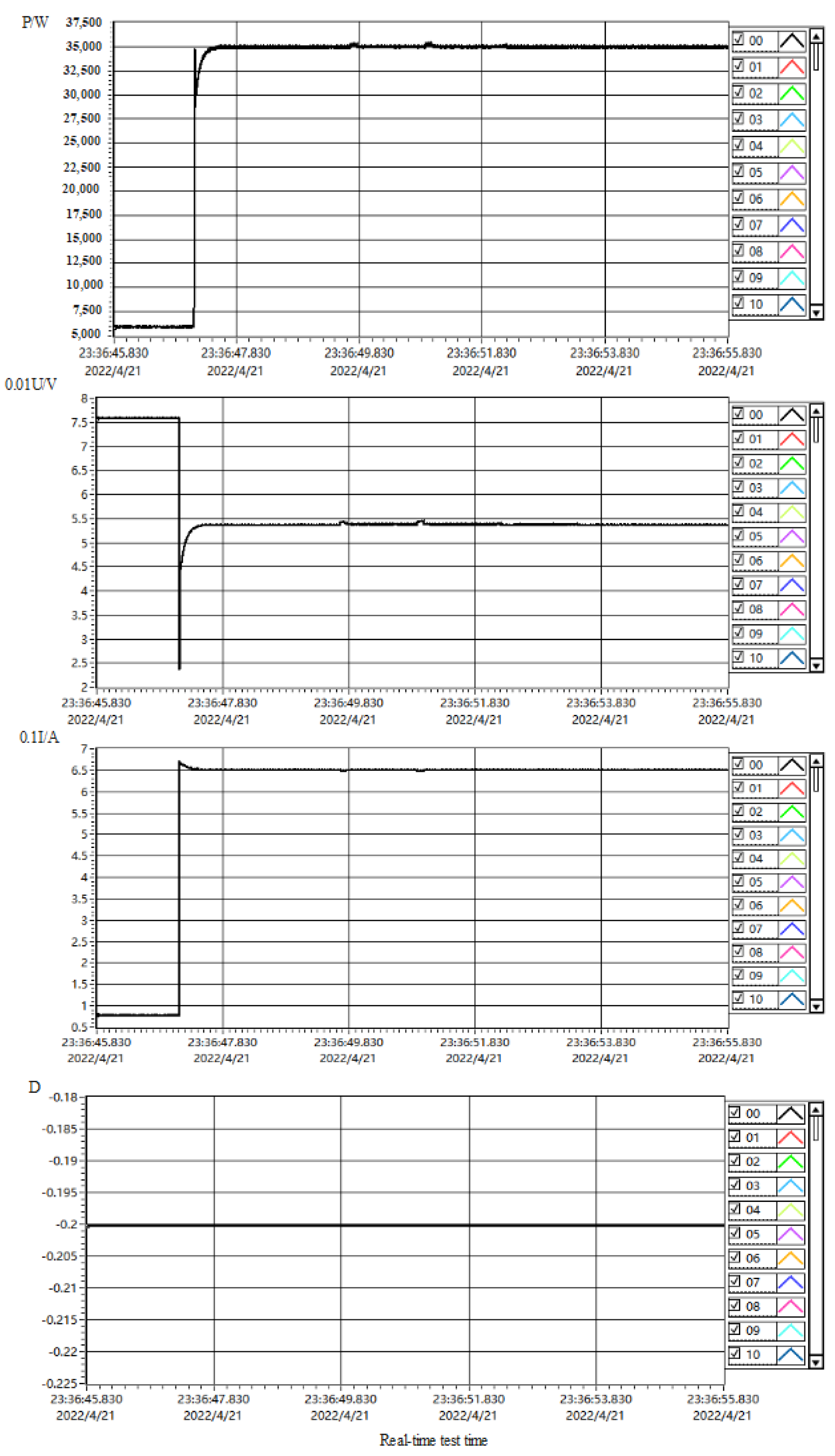
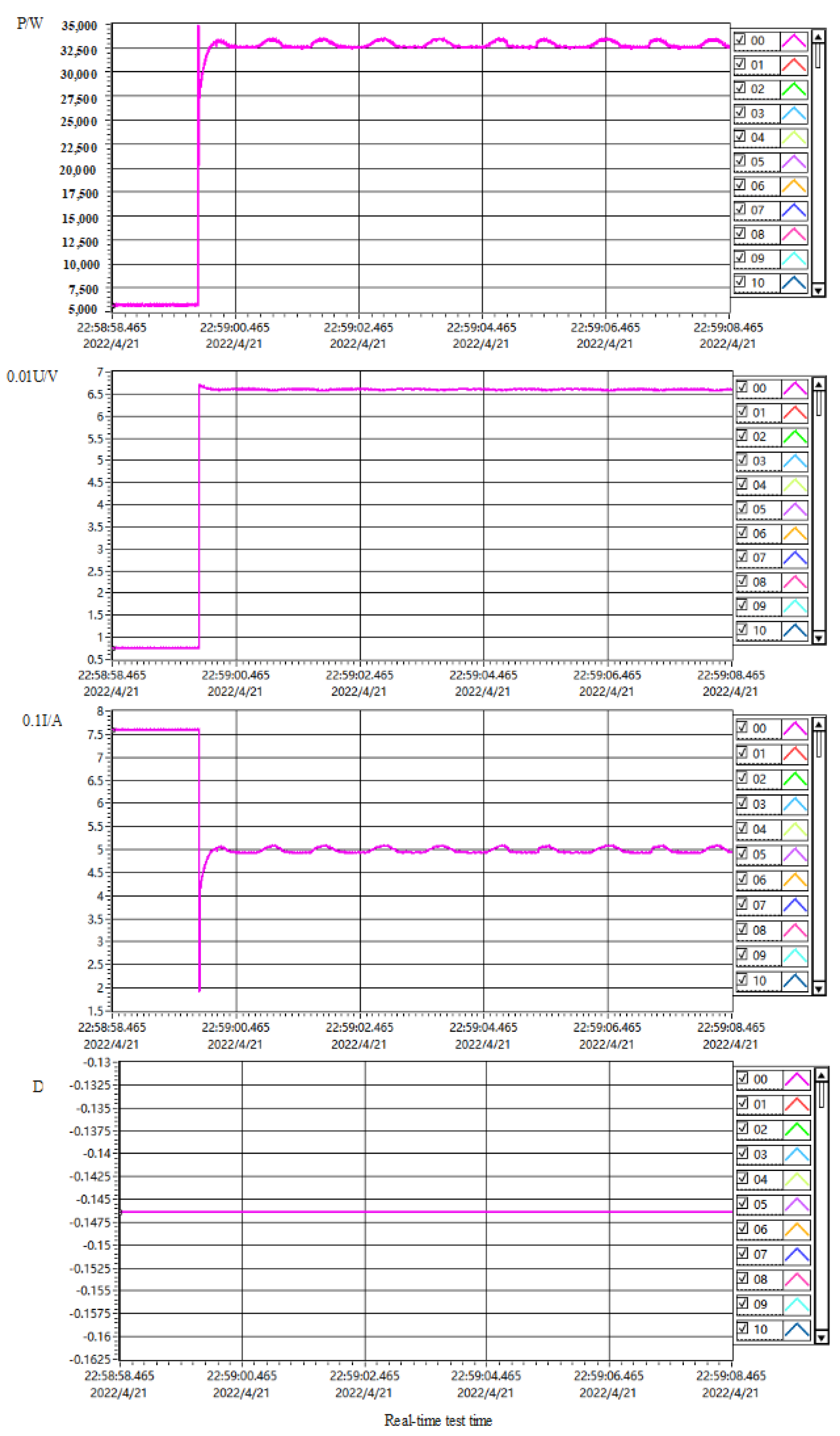
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bryant, J.S.; Sokolowski, P.; Jennings, R.; Meegahapola, L. Synchronous Generator Governor Response: Performance Implications Under High Share of Inverter-Based Renewable Energy Sources. IEEE Trans. Power Syst. 2021, 31, 601–612. [Google Scholar] [CrossRef]
- Hao, L.N.; Umar, M.; Khan, Z.; Ali, W. Green Growth and Low Carbon Emission in G7 Countries: How Critical the Network of Environmental Taxes, Renewable Energy and Human Capital. Sci. Total Environ. 2021, 31, 752. [Google Scholar] [CrossRef]
- Yang, L.; Huang, J.; Feng, B. Undersea Wireless Power and Data Transfer System with Shared Channel Powered by Marine Renewable Energy System. IEEE J. Emerg. Sel. Top. Circuits Syst. 2022, 31, 52–64. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q. Sustainable development of renewable energy integrated power sector: Trends, environmental impacts, and recent challenges. Sci. Total Environ. 2022, 31, 822. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.S.; Mitolo, M. Multilevel Converter Applications in the Area of Renewable Energy, More-Electric Propulsion, Electric Vehicles and Power Grid Integration. IEEE Trans. Ind. Appl. 2021, 57, 3050–3051. [Google Scholar]
- Badawy, M.O.; Bose, S.M.; Sozer, Y. A Novel Differential Power Processing Architecture for a Partially Shaded PV String Using Distributed Control. IEEE Trans. Ind. Appl. 2020, 7, 99. [Google Scholar] [CrossRef]
- Lashab, A.; Sera, D.; Hahn, F. Cascaded Multilevel PV Inverter with Improved Harmonic Performance During Power Imbalance Between Power Cells. IEEE Trans. Ind. Appl. 2020, 56, 2788–2798. [Google Scholar] [CrossRef]
- Chepp, E.D.; Gasparin, F.P.; Krenzinger, A. Accuracy investigation in the modeling of partially shaded photovoltaic systems. Sol. Energy 2021, 56, 182–192. [Google Scholar] [CrossRef]
- Calcabrini, A.; Weegink, R.; Manganiello, P. Simulation study of the electrical yield of various PV module topologies in partially shaded urban scenarios. Sol. Energy 2021, 6, 726–733. [Google Scholar] [CrossRef]
- Fpa, B.; So, A.; Al, A. Energy partitioning and spatial variability of air temperature, VPD and radiation in a greenhouse tunnel shaded by semitransparent organic PV modules. Sol. Energy 2021, 26, 578–589. [Google Scholar]
- Kawamura, H.; Naka, K.; Yonekura, N.; Yamanaka, S.; Kawamura, H.; Ohno, H.; Naito, K. Simulation of I–V characteristics of a PV module with shaded PV cells. Sol. Energy Mater. Sol. Cells 2003, 75, 613–621. [Google Scholar] [CrossRef]
- Candela, R.; Dio, V.D.; Sanseverino, E.R. Reconfiguration Techniques of Partial Shaded PV Systems for the Maximization of Electrical Energy Production. In Proceedings of the 2007 International Conference on Clean Electrical Power, Capri, Italy, 21–23 May 2007; pp. 716–719. [Google Scholar]
- Mokhlis, M.; Ferfra, M.; Abbou, A. SMC based MPPT to track the GMPP under Partial Shading. In Proceedings of the 2019 7th International Renewable and Sustainable Energy Conference (IRSEC), Agadir, Morocco, 27–30 November 2019. [Google Scholar]
- Manickam, C.; Raman, G.R.; Raman, G.P. A Hybrid Algorithm for Tracking of GMPP Based on P&O and PSO with Reduced Power Oscillation in String Inverters. IEEE Trans. Ind. Electron. 2016, 63, 6013–6021. [Google Scholar]
- Abo, F.G.; Marini-Kragi, I.; Garma, T. Development of thermo-electrical model of photovoltaic panel under hot-spot conditions with experimental validation. Energy 2021, 6, 15–21. [Google Scholar]
- Ma, M.; Liu, H.; Zhang, Z. Rapid diagnosis of hot spot failure of crystalline silicon PV module based on I-V curve. Microelectron. Reliab. 2019, 16, 100–101. [Google Scholar] [CrossRef]
- Alonso, M.C. Thermal and electrical effects caused by outdoor hot-spot testing in associations of photovoltaic cells. Prog. Photovolt. Res. Appl. 2003, 11, 293–307. [Google Scholar]
- Spanoche, S.A.; Stewart, J.D.; Hawley, S.L.; Opris, I.E. Model-Based Method for Partially Shaded PV Module Hot-Spot Suppression. IEEE J. Photovolt. 2013, 3, 785–790. [Google Scholar] [CrossRef]
- Ramaprabha, R.; Balaji, M.; Mathur, B. Maximum power point tracking of partially shaded solar PV system using modified Fibonacci search method with fuzzy controller. Int. J. Electr. Power Energy Syst. 2012, 43, 754–765. [Google Scholar] [CrossRef]
- Liu, L.; Wang, Z.; Zhang, H. Fuzzy-immune MPPT control of PV generation system under partial shade condition. Electr. Power Autom. Equip. 2010, 30, 96–99. [Google Scholar]
- Mohammadinodoushan, M.; Abbassi, R.; Jerbi, H.; Ahmed, F.W.; Ahmed, H.A.K.; Rezvani, A. A new MPPT design using variable step size perturb and observe method for PV system under partially shaded conditions by modified shuffled frog leaping algorithm- SMC controller. Sustain. Energy Technol. Assess. 2021, 45, 101056. [Google Scholar] [CrossRef]
- Shaiek, Y.; Ben Smida, M.; Sakly, A.; Mimouni, M.F. Comparison between conventional methods and GA approach for maximum power point tracking of shaded solar PV generators. Sol. Energy 2013, 90, 107–122. [Google Scholar] [CrossRef]
- Salam, I.Z. An improved modeling method to determine the model parameters of photovoltaic (PV) modules using differential evolution (DE). Sol. Energy 2011, 84, 2349–2359. [Google Scholar]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. MPPT in Dynamic Condition of Partially Shaded PV System by Using WODE Technique. IEEE Trans. Sustain. Energy 2017, 8, 1204–1214. [Google Scholar] [CrossRef]
- Beltran, A.S.; Das, S. Particle Swarm Optimization with Reducing Boundaries (PSO-RB) for Maximum Power Point Tracking of Partially Shaded PV Arrays. In Proceedings of the 2020 IEEE 47th Photovoltaic Specialists Conference (PVSC), Calgary, ON, Canada, 15 June–21 August 2020. [Google Scholar]
- Li, F.M.; Deng, F.; Guo, S. MPPT control of PV system under partially shaded conditions based on PSO-DE hybrid algorithm. In Proceedings of the 32nd Chinese Control Conference, Hefei, China, 22–24 August 2020. [Google Scholar]
- Singh, N.; Gupta, K.K.; Jain, S.K. A Flying Squirrel Search Optimization for abb:MPPT under Partial Shaded Photovoltaic System. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 4963–4978. [Google Scholar] [CrossRef]
- Nugraha, D.A.; Lian, K.L. A Novel MPPT Method Based on Cuckoo Search Algorithm and Golden Section Search Algorithm for Partially Shaded PV System. Can. J. Electr. Comput. Eng. 2020, 42, 173–182. [Google Scholar] [CrossRef]
- Mosaad, M.I.; El-Raouf, M.; Al-Ahmar, M.A. Maximum Power Point Tracking of PV system Based Cuckoo Search Algorithm: Review and comparison. Energy Procedia 2019, 2, 117–126. [Google Scholar] [CrossRef]
- Long, W.; Wu, T.; Jiao, J. Refraction-learning-based whale optimization algorithm for high-dimensional problems and parameter estimation of PV model. Eng. Appl. Artif. Intell. 2020, 89, 103457. [Google Scholar] [CrossRef]
- Sarkar, R.; Kumar, J.R.; Sridhar, R.; Vidyasagar, S. A New Hybrid BAT-ANFIS-Based Power Tracking Technique for Partial Shaded Photovoltaic Systems. Int. J. Fuzzy Syst. 2021, 23, 1313–1325. [Google Scholar] [CrossRef]
- Taherkhani, M.; Faraji, J.; Khanjanianpak, M.; Aliyan, E.; Ghiyasi, M.I. A GMPPT design using the following optimization algorithm for PV systems. Int. Trans. Electr. Energy Syst. 2021, 31, e12794. [Google Scholar] [CrossRef]
- Wang, Y.; Zeng, C.B.; Wen-Wen, F.U. A Novel Maximum Power Point Tracking Scheme for PV Systems under Partially Shaded Conditions Based on Ant Colony Algorithm. J. Inn. Mong. Norm. Univ. 2015, 55, 1689–1698. [Google Scholar]
- Wan, X.F.; Wei, H.U.; Yun-Jun, Y.U. Global MPPT Control for Grid-Connected PV System under Partially Shaded Condition. Comput. Simul. 2016, 2, 378–432. [Google Scholar]
- Fares, D.; Fathi, M.; Shams, I.; Mekhilef, S. A novel global MPPT technique based on squirrel search algorithm for PV module under partial shading conditions. Energy Convers. Manag. 2021, 230, 113773. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Wang, H.J.; Pan, J.S.; Nguyen, T.T.; Weng, S. Distribution network reconfiguration with distributed generation based on parallel slime mould algorithm. Energy 2022, 244, 123011. [Google Scholar] [CrossRef]
- Liu, Y.; Heidari, A.A.; Ye, X.; Liang, G.; Chen, H.; He, C. Boosting Slime Mould Algorithm for Parameter Identification of Photovoltaic Models. Energy 2021, 234, 121164. [Google Scholar] [CrossRef]
- Mirza, A.F.; Mansoor, M.; Zhan, K.; Ling, Q. High-efficiency swarm intelligent maximum power point tracking control techniques for varying temperature and irradiance. Energy 2021, 228, 120602. [Google Scholar] [CrossRef]
- Roman, E.; Alonso, R.; Ibanez, P.; Elorduizapatarietxe, S.; Goitia, D. Intelligent PV Module for Grid-Connected PV Systems. IEEE Trans. Ind. Electron. 2006, 53, 1066–1073. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Module | DC–DC | ||
|---|---|---|---|
| IL (A) | 7.8649 | C1 (F) | 500 × 10−6 |
| Io (A) | 2.9259 × 10−10 | L (H) | 0.0086 |
| Rsh (Ω) | 313.3991 | C2 (F) | 2.03 × 10−5 |
| Rs (Ω) | 0.3938 | RL (Ω) | 20 |
| PV Module | Lsoltech | LSTH-215-P | |
|---|---|---|---|
| Pmax (W) | 213.5 | Im (A) | 7.35 |
| Voc (V) | 36.3 | Temperature coefficient of Voc (V/°C) | −0.36099 |
| Vmax (V) | 29 | Temperature coefficient of Isc (A/°C) | 0.102 |
| Isc | 8.37 | Cells of per module | 60 |
| Irradiance (W/m2) | Algorithm | Pmax (W) | Ppv (W) | Tracking Speed (s) | MPPT Efficiency (100%) |
|---|---|---|---|---|---|
| PSC1 (1000 400 800) | PSO | 5761 | 5760 | 0.23 | 99.98 |
| SSA | 5761 | 0.375 | 100 | ||
| TSO | 5761 | 0.3 | 100 | ||
| BWO | 5761 | 0.24 | 100 | ||
| ISMA | 5759 | 0.2010 | 99.97 | ||
| PSC2 (300 500 700) | PSO | 2860 | 2438 | 0.255 | 87.07 |
| SSA | 2832 | 0.392 | 99.02 | ||
| TSO | 2650 | 0.304 | 92.66 | ||
| BWO | 2825 | 0.2105 | 98.8 | ||
| ISMA | 2840 | 0.1899 | 99.3 | ||
| PSC3 (200 400 600) | PSO | 2253 | 2029 | 1.07 | 90.06 |
| SSA | 1872 | 0.27 | 83.09 | ||
| TSO | 2250 | 0.36 | 99.87 | ||
| BWO | 2250 | 0.22 | 99.87 | ||
| ISMA | 2253 | 0.1901 | 100 |
| PV Module | |||
|---|---|---|---|
| Isc (A) | 3.35 | Radiance (W/m2) | 500/1000 |
| Im (A) | 3.05 | Series cells | 35 |
| Voc (V) | 21.7 | Parallel cells | 20 |
| Vm (V) | 17.4 | T (°C) | 25 |
| Irradiance (W/m2) | Algorithm | Pmax (W) | Ppv (W) | MPPT Efficiency (100%) |
|---|---|---|---|---|
| (500 1000) | PSO | 37,000 | 32,521 | 87.89 |
| SSA | 35,002 | 94.6 | ||
| TSO | 36,431 | 98.46 | ||
| BWO | 33,466 | 90.45 | ||
| ISMA | 36,692 | 99.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.; Zhang, L.; Dong, W. Research and Application of MPPT Control Strategy Based on Improved Slime Mold Algorithm in Shaded Conditions. Electronics 2022, 11, 2122. https://doi.org/10.3390/electronics11142122
Fu C, Zhang L, Dong W. Research and Application of MPPT Control Strategy Based on Improved Slime Mold Algorithm in Shaded Conditions. Electronics. 2022; 11(14):2122. https://doi.org/10.3390/electronics11142122
Chicago/Turabian StyleFu, Changxin, Lixin Zhang, and Wancheng Dong. 2022. "Research and Application of MPPT Control Strategy Based on Improved Slime Mold Algorithm in Shaded Conditions" Electronics 11, no. 14: 2122. https://doi.org/10.3390/electronics11142122