
Forecasting of Reactive Power Consumption with the Use of Artificial Neural Networks


Abstract
:1. Introduction
2. Materials and Methods
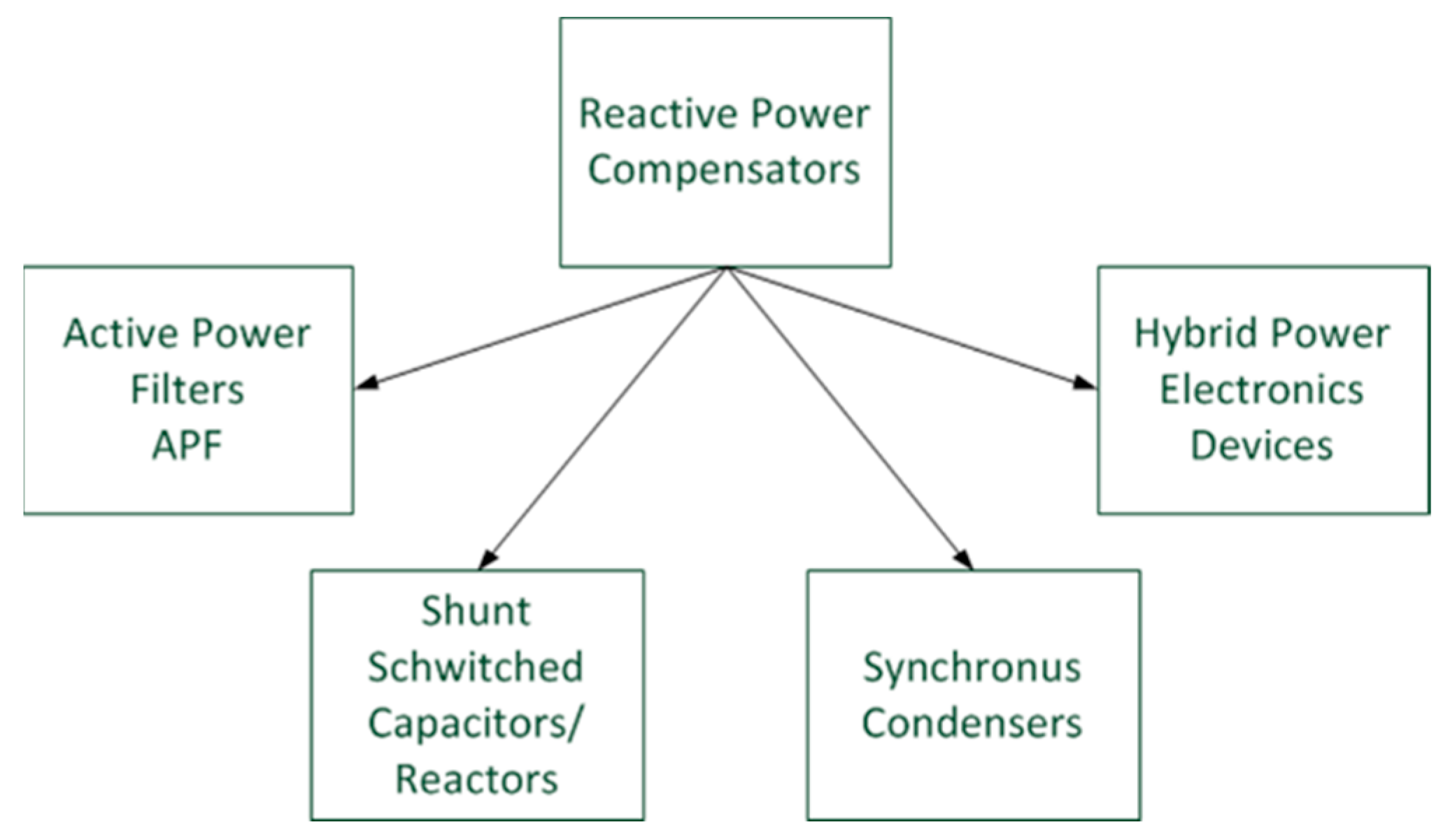
2.1. Classification of Reactive Power Compensation Systems
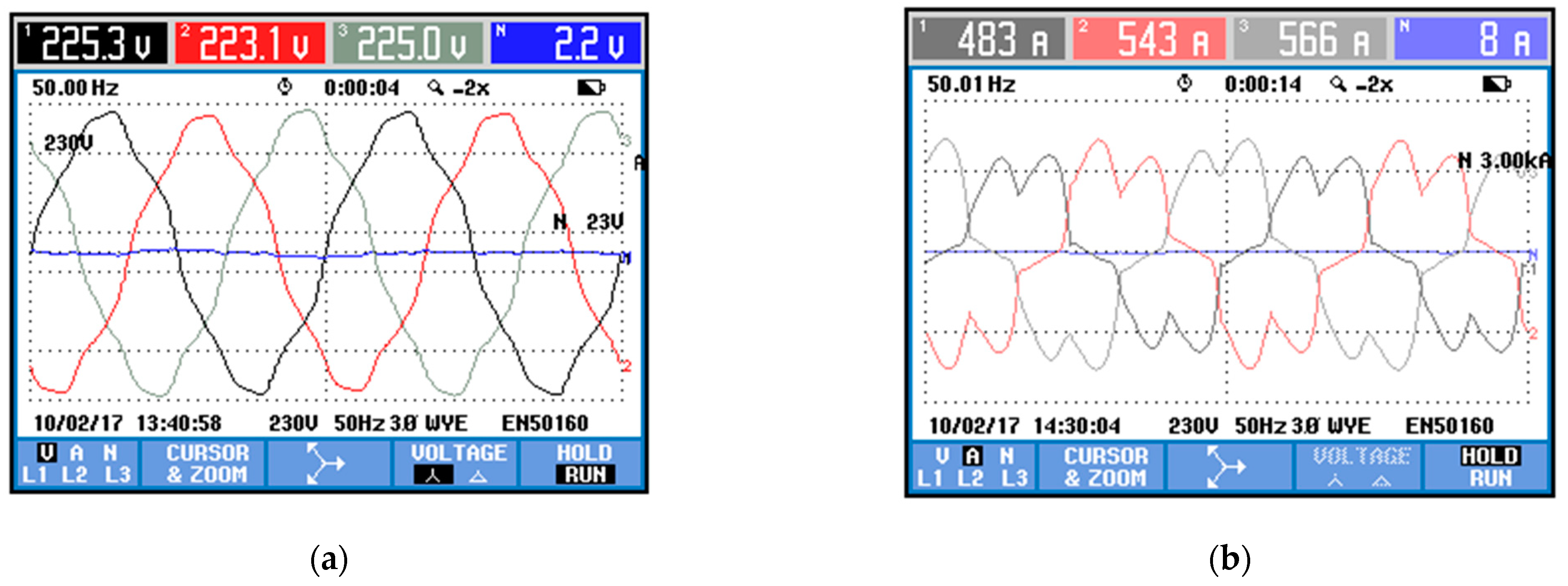
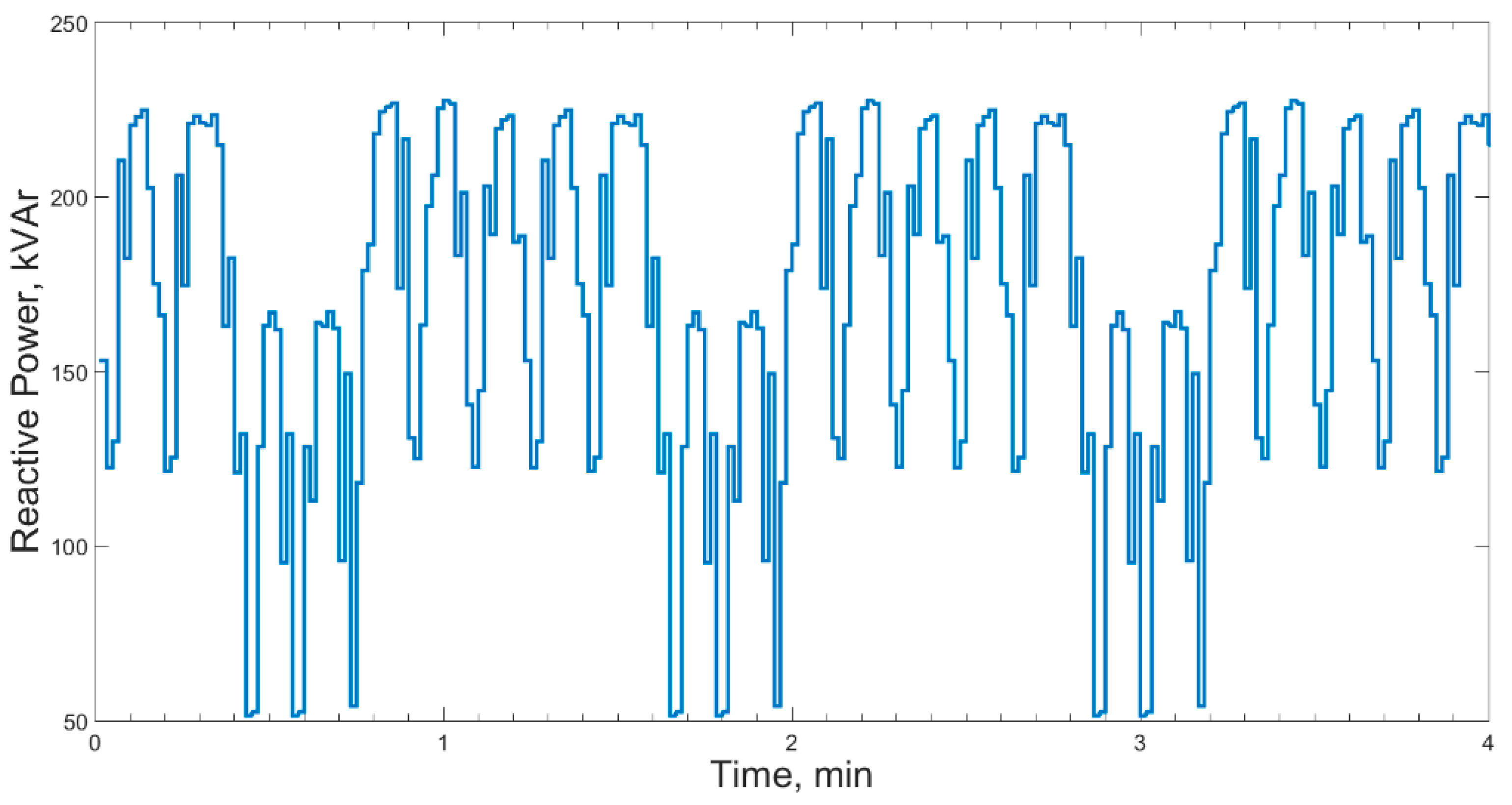
2.2. Research on a Real Object
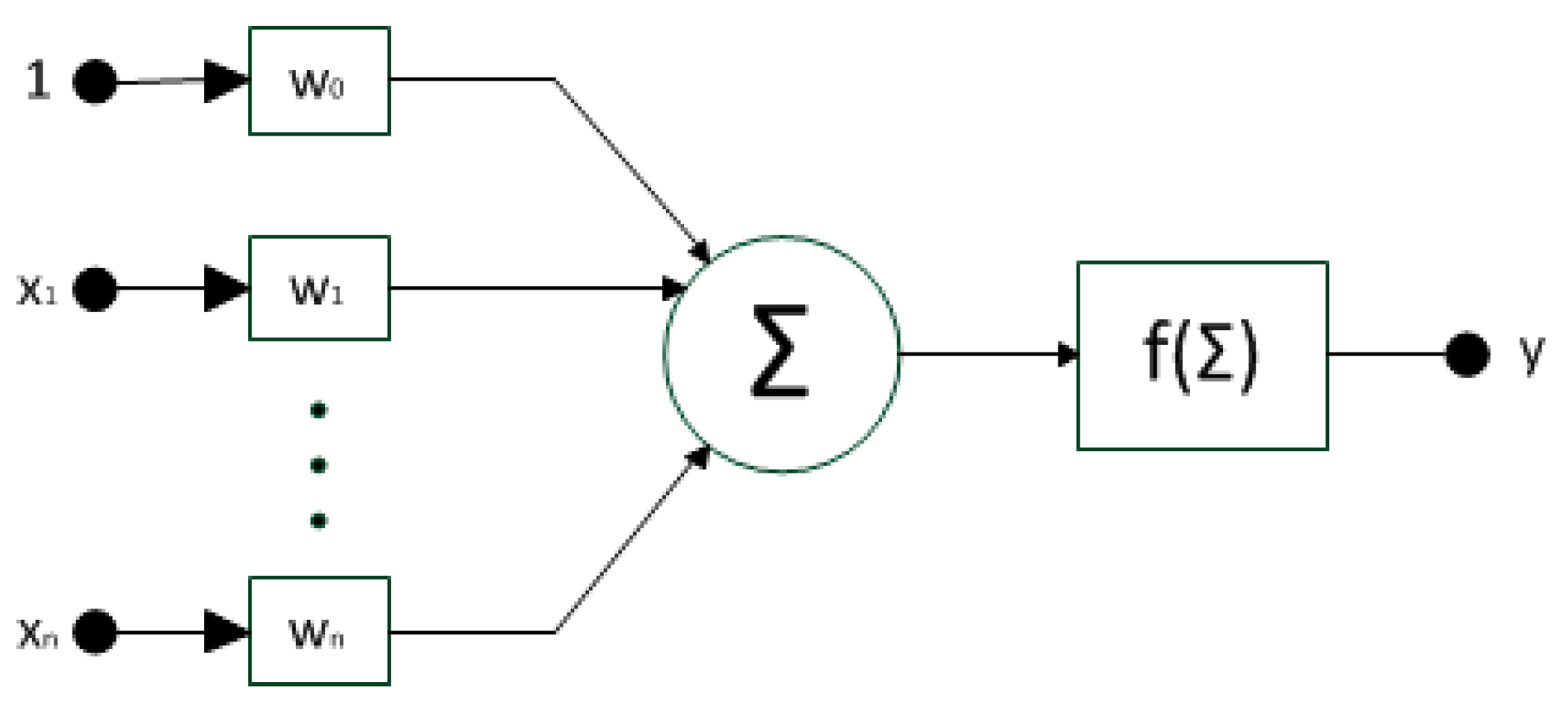
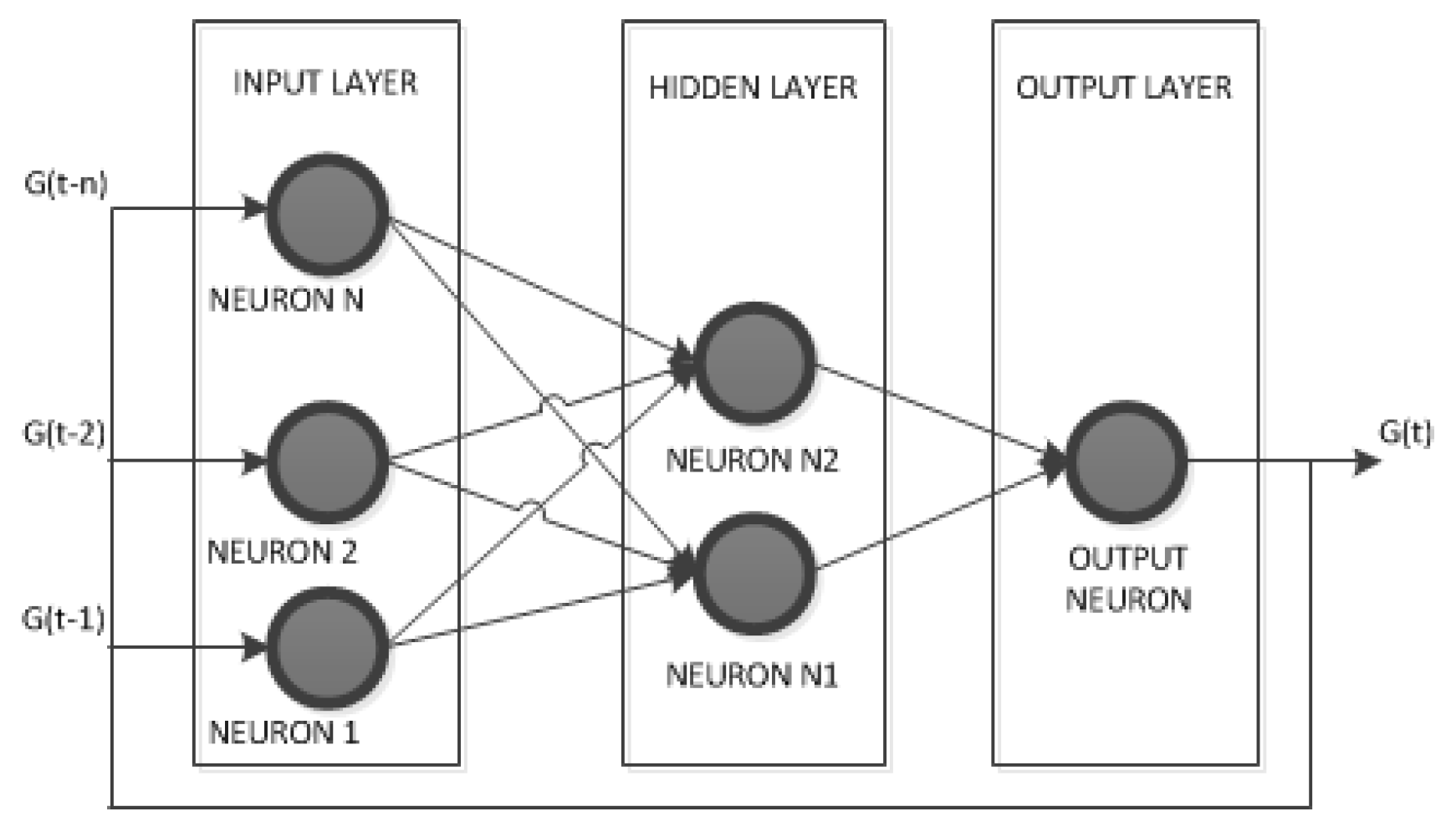
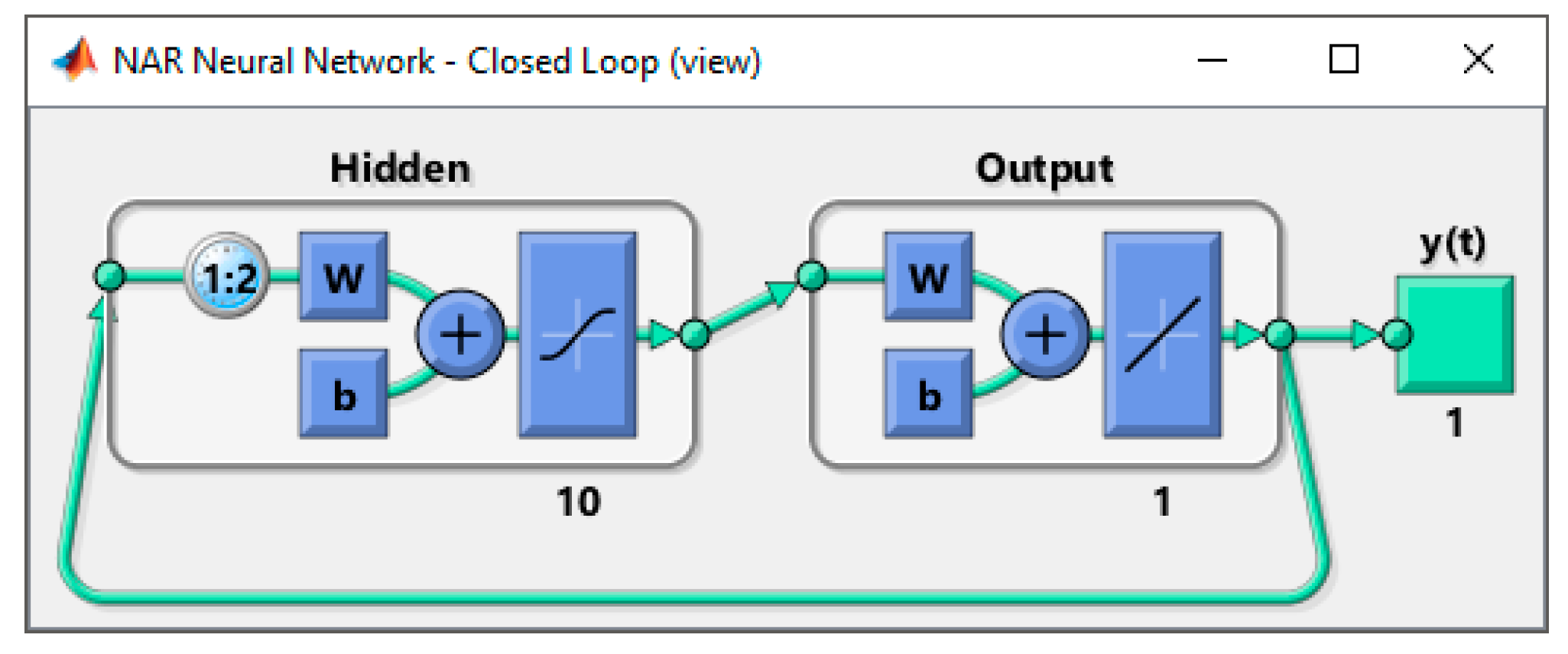
2.3. Artificial Neural Networks
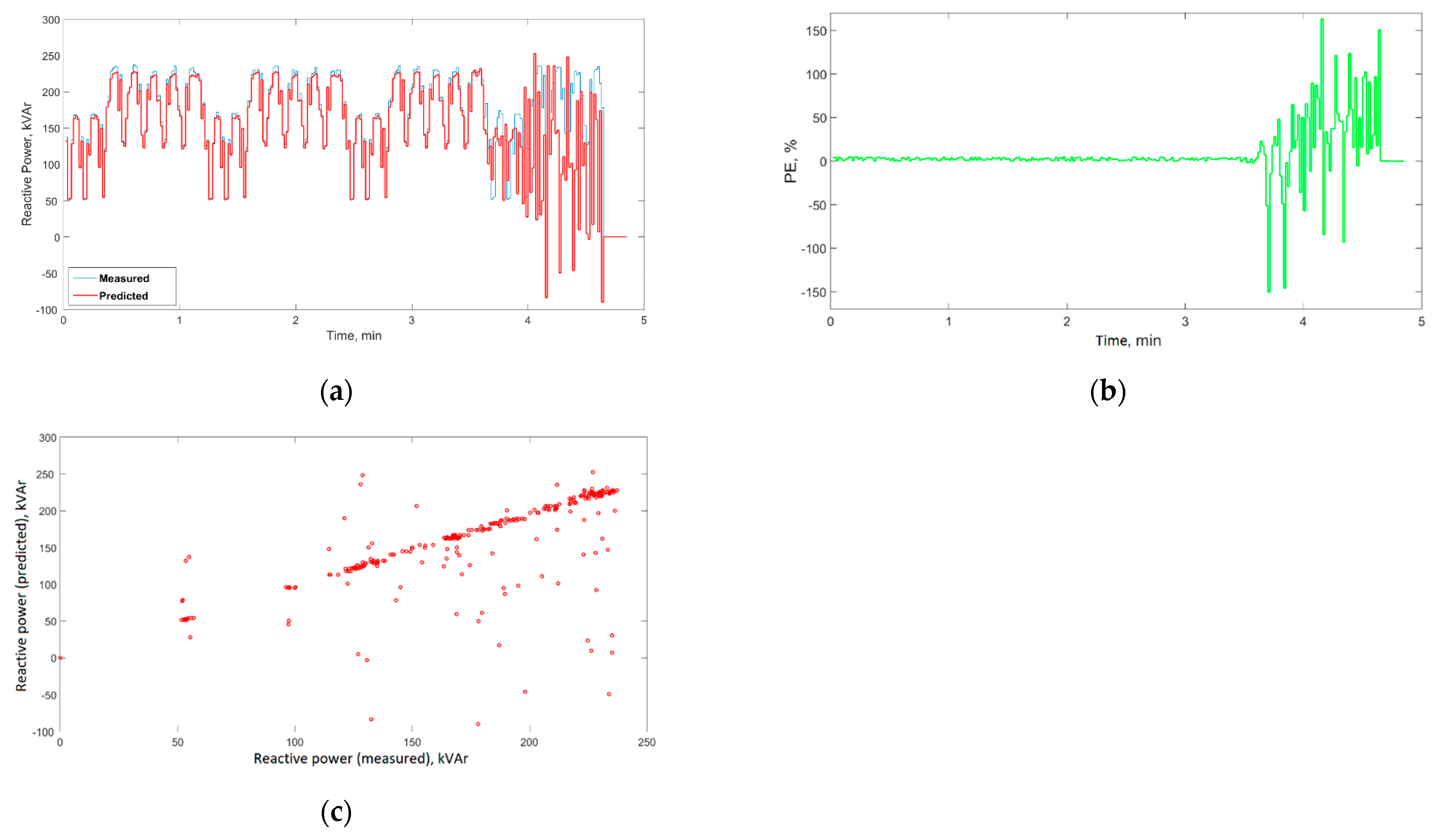
3. Results, Implementation of Neural Networks
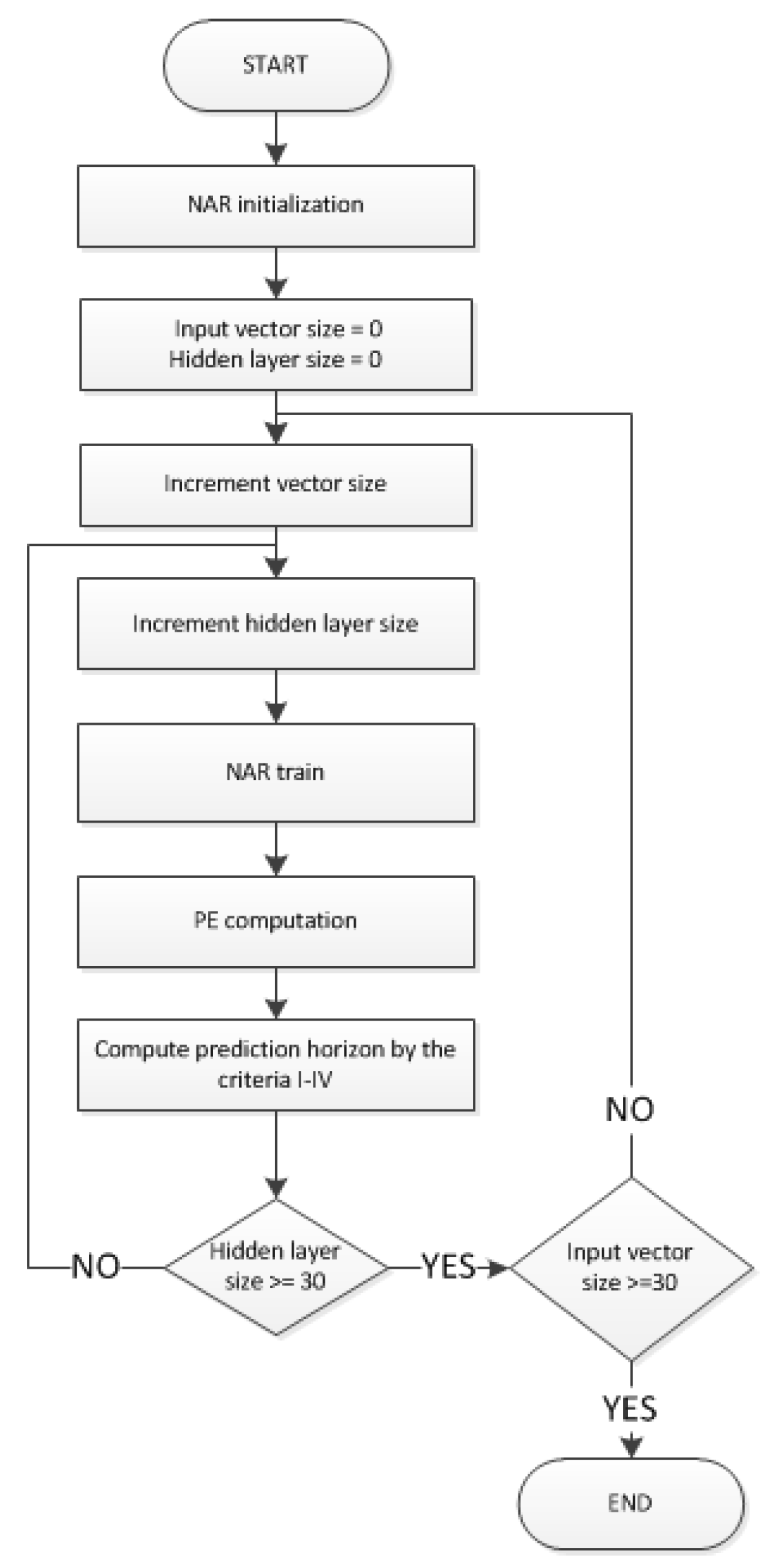
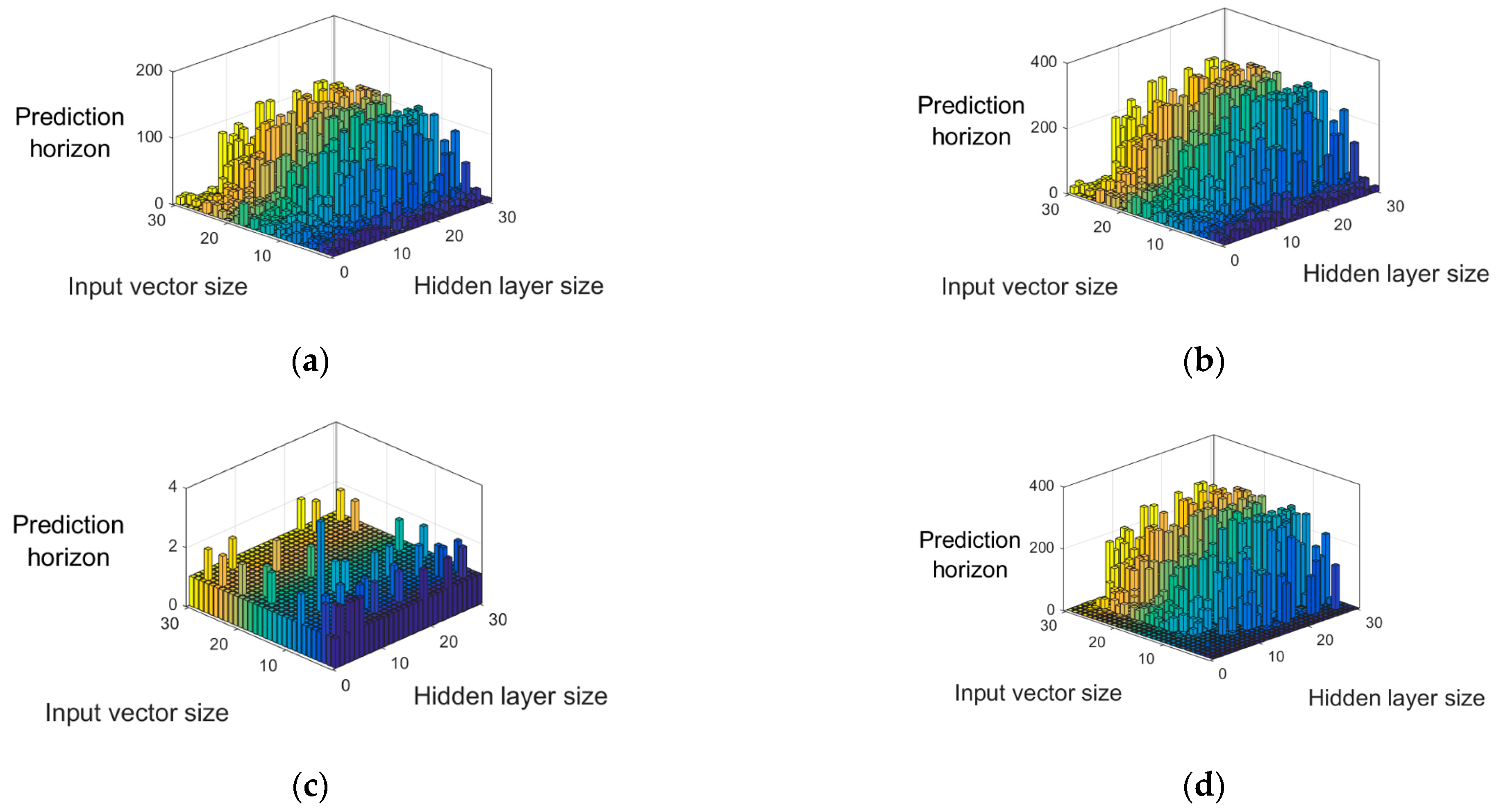
- Criterion I consists in determining the maximum number of consecutive samples (the so-called prediction horizon) for which E does not exceed 5%;
- Criterion II, as with criterion I, consists in determining the maximum prediction window for E not exceeding 2%;
- Criterion III consists in determining the number of samples for which E does not exceed 5%;
- Criterion IV consists in determining the number of samples for which E does not exceed 2%.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Anderson, H.C.; Al Hadi, A.; Jones, E.S.; Ionel, D.M. Power factor and reactive power in us residences—Survey and EnergyPlus modeling. In Proceedings of the 2021 10th International Conference on Renewable Energy Research and Application (ICRERA), Istanbul, Turkey, 26–29 September 2021; pp. 418–422. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, T.; Zhou, K.; Cao, K.; Cai, D.; Liu, H.; Zhou, C. Reactive power optimization of wind farm considering reactive power regulation capacity of wind generators. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 4031–4035. [Google Scholar] [CrossRef]
- Trawiński, T.; Szczygieł, M.; Kołton, W.; Kłapyta, G.; Hojeński, M.; Morański, J.; Ozdoba, K. Analysis of electrical energy consumption in chosen company in the context of the modern methods of reactive power compensation. Pract. Nauk. Pśl. Elektr. 2015, 3, 65–78. (In Polish) [Google Scholar]
- Huang, H.; Nie, J.; Li, Z.; Wang, K. Distributed dynamic reactive power support system based on DFIGs. In Proceedings of the 2019 IEEE 8th International Conference on Advanced Power System Automation and Protection (APAP), Xi’an, China, 21–24 October 2019; pp. 283–288. [Google Scholar] [CrossRef]
- Pournazarian, B.; Sangrody, R.; Saeedian, M.; Gomis-Bellmunt, O.; Pouresmaeil, E. Enhancing microgrid small-signal stability and reactive power sharing using anfis-tuned virtual inductances. IEEE Access 2021, 9, 104915–104926. [Google Scholar] [CrossRef]
- Huang, S.; Yao, R.; Huang, C.; Wang, R.; Li, X.; Yang, H. Reactive power optimization analysis of HVDC converter station based on RTDS simulation. In Proceedings of the 2020 4th International Conference on HVDC (HVDC), Xi’an, China, 6–9 November 2020; pp. 439–442. [Google Scholar] [CrossRef]
- Buła, D.; Pasko, M. Dynamical properties of hybrid power filter with single tuned passive filter. Przegląd Elektrotech. 2011, 1, 91–95. [Google Scholar]
- Buła, D.; Pasko, M. Stability analysis of hybrid active power filter. Bull. Pol. Acad. Sci. Tech. Sci. 2014, 62, 279–286. [Google Scholar] [CrossRef] [Green Version]
- Das, J.C. Passive filters–potentialities and limitations. IEEE Trans. Ind. Appl. 2004, 40, 232–241. [Google Scholar] [CrossRef]
- Baggini, A. Handbook of Power Quality; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Strzelecki, R.; Supronowicz, H. Power Factor in AC Power Systems and Methods for Its Improvement; Warsaw University of Technology Publishing House: Warszawa, Poland, 2000. (In Polish) [Google Scholar]
- Hanzelka, Z. Jakość Dostawy Energii Elektrycznej. Zaburzenia Wartości Skutecznej Napięcia; Wydawnictwo AGH: Kraków, Poland, 2013. (In Polish) [Google Scholar]
- Polish Norm PN-EN 60831-1:2014-10; Kondensatory Samoregenerujące do Równoległej Kompensacji Mocy Biernej w Sieciach Elektroenergetycznych Prądu Przemiennego o Napięciu Znamionowym do 1000 V Włącznie. Sektor Elektryki: Warszawa, Poland, 2014. (In Polish)
- Irtija, N.; Sangoleye, F.; Tsiropoulou, E. Contract-Theoretic Demand Response Management in Smart Grid Systems. IEEE Access 2020, 8, 184976–184987. [Google Scholar] [CrossRef]
- Tomcala, J. Towards Optimal Supercomputer Energy Consumption Forecasting Method. Mathematics 2021, 9, 2695. [Google Scholar] [CrossRef]
- McCulloch, W.S.; Pitts, W. A logical calculus of the ideas immanent in nervous activity. Bull. Math. Biophys. 1943, 5, 115–133. [Google Scholar] [CrossRef]
- Włas, M. Zastosowanie algorytmów sztucznych sieci neuronowych do prognozowania zużycia energii elektrycznej. In Zeszyty Naukowe Wydziału Elektrotechniki i Automatyki Politechniki Gdańskiej; Politechniki Gdańskiej: Gdańsk, Poland, 2016; Volume 51, pp. 217–220. (In Polish) [Google Scholar]
- Nocoń, A. Metody CAD i AI W inżynierii Elektrycznej; Wydawnictwo WNT: Warsaw, Poland, 2018. (In Polish) [Google Scholar]
- Siebert, J.; Gross, J.; Schroth, C.H. A Systematic Review of Python Packages for Time Series Analysis; Fraunhoffer-Institure fur Exerimentelles Software Engineering: Kaiserslautern, Germany, 2021. [Google Scholar]
- Łęski, J. Systemy Neuronowo-Rozmyte; Wydawnictwo WNT: Warsaw, Poland, 2008. [Google Scholar]
- Jeżyk, T.; Tomczewski, A. Krótkoterminowe prognozowanie zużycia energii elektrycznej z wykorzystaniem sztucznej sieci neuronowej. Pozn. Univ. Technol. Acad. J. 2014, 79, 121–130. (In Polish) [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Assessment Criteria | Value |
|---|---|
| Criterion I | 217 |
| Criterion II | 2 |
| Criterion III | 217 |
| Criterion IV | 92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Błaszczok, D.; Trawiński, T.; Szczygieł, M.; Rybarz, M. Forecasting of Reactive Power Consumption with the Use of Artificial Neural Networks. Electronics 2022, 11, 2005. https://doi.org/10.3390/electronics11132005
Błaszczok D, Trawiński T, Szczygieł M, Rybarz M. Forecasting of Reactive Power Consumption with the Use of Artificial Neural Networks. Electronics. 2022; 11(13):2005. https://doi.org/10.3390/electronics11132005
Chicago/Turabian StyleBłaszczok, Damian, Tomasz Trawiński, Marcin Szczygieł, and Marek Rybarz. 2022. "Forecasting of Reactive Power Consumption with the Use of Artificial Neural Networks" Electronics 11, no. 13: 2005. https://doi.org/10.3390/electronics11132005