
Fusion of Infrared and Visible Images Based on Optimized Low-Rank Matrix Factorization with Guided Filtering

Abstract
:1. Introduction
2. Key Theories
2.1. Low-Rank Matrix Factorization Based on Minimizing Errors
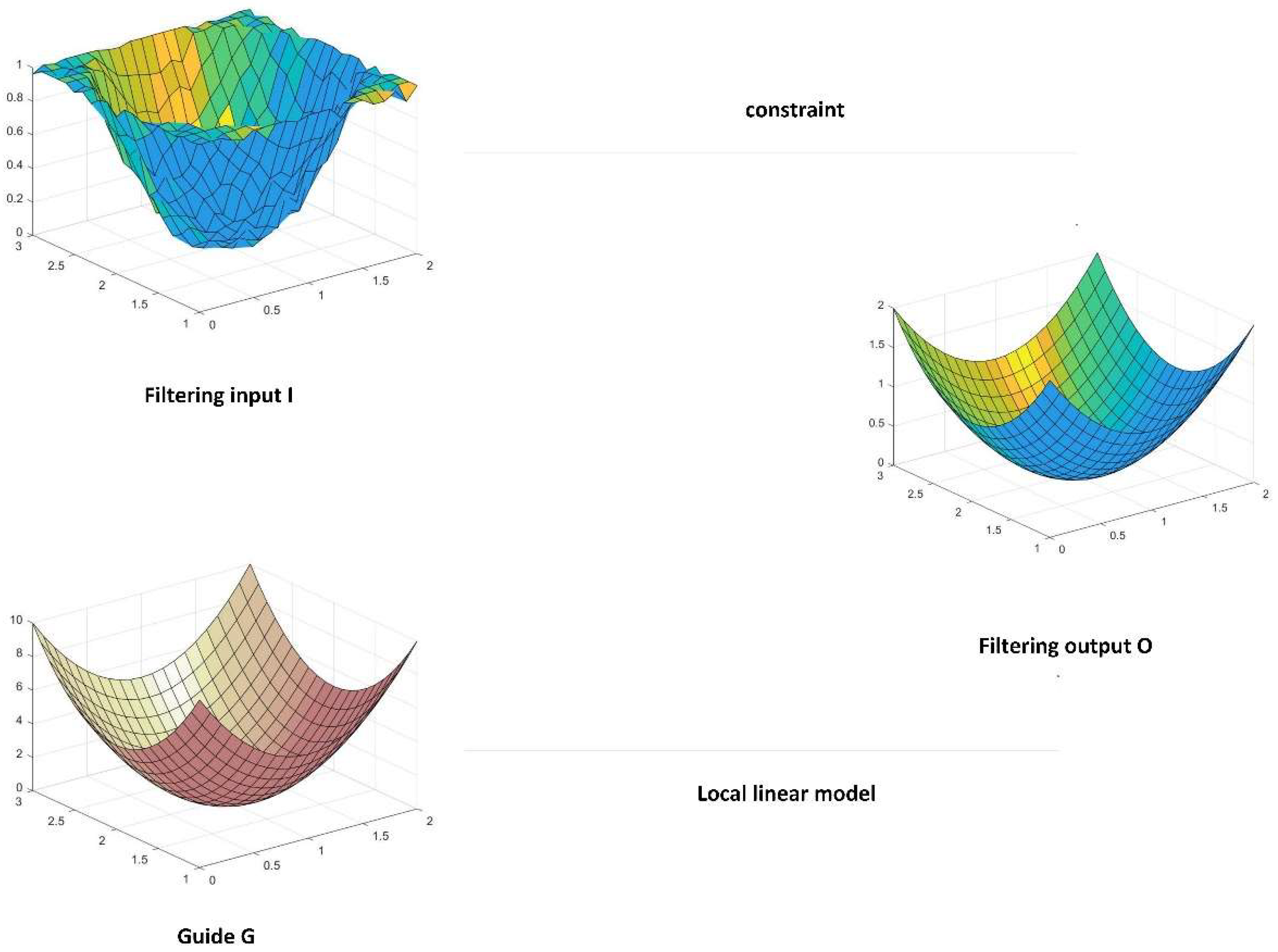
2.2. Guided Filtering
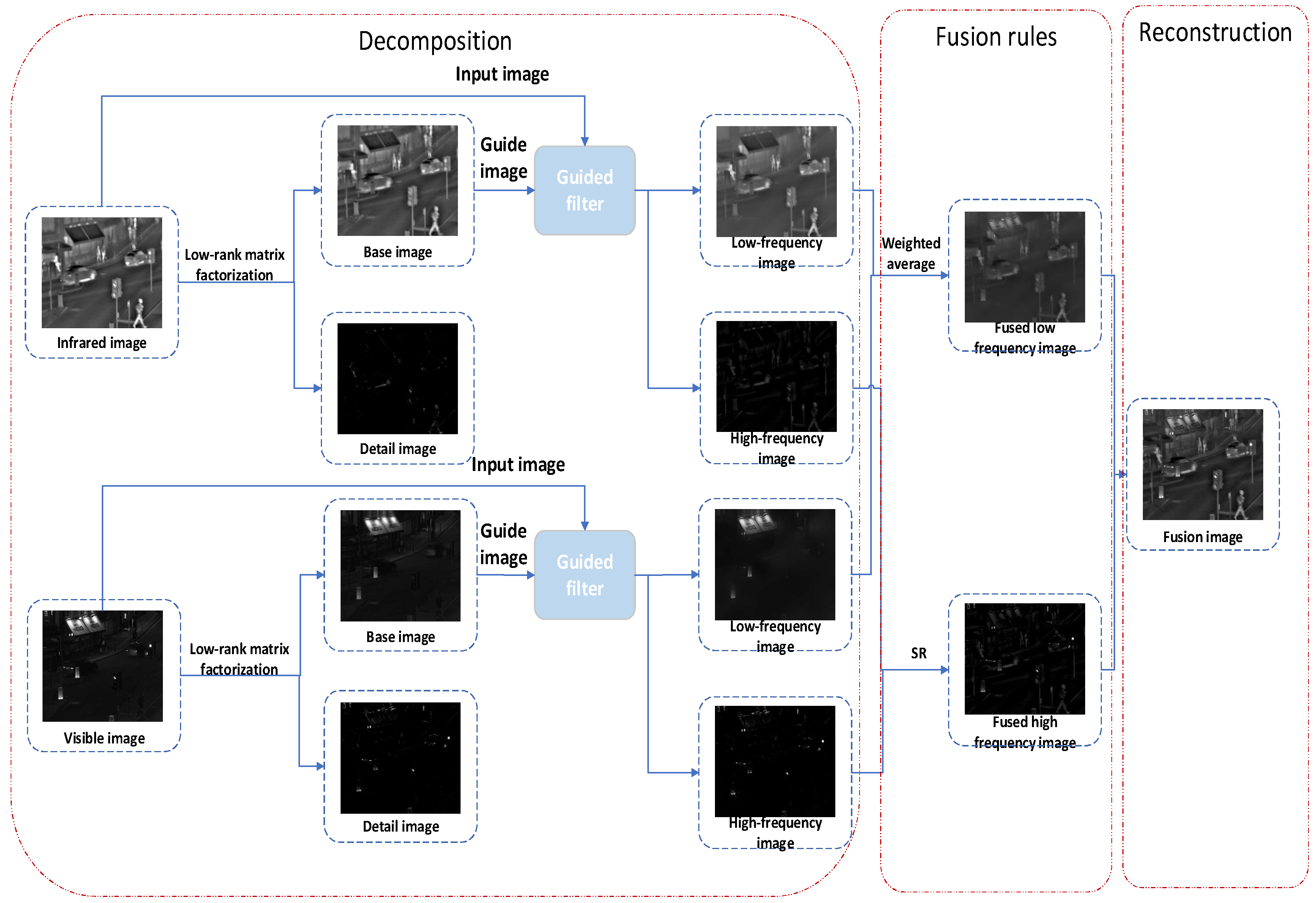
3. Fusion Framework
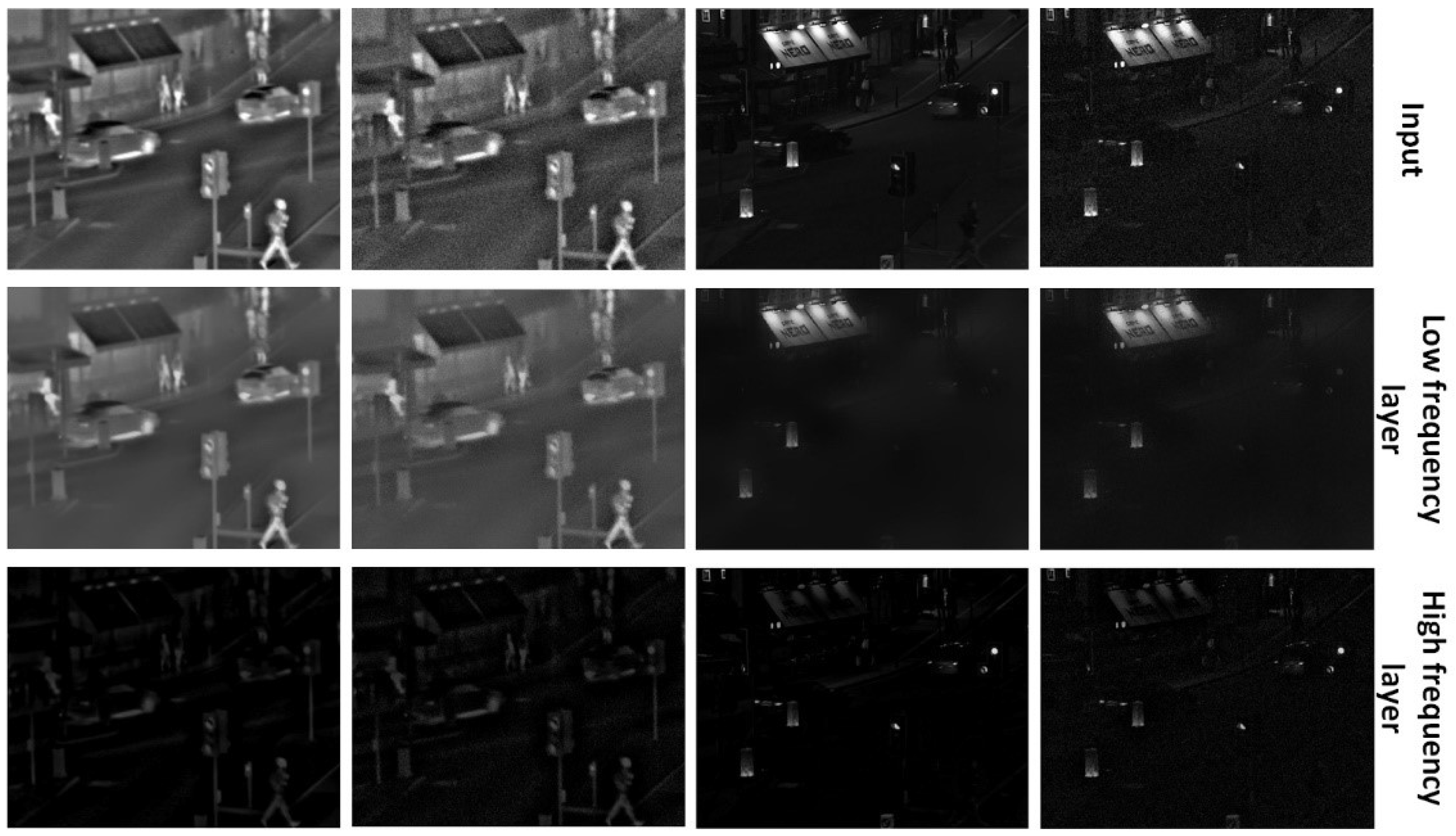
3.1. The Decomposition Model
3.2. Fusion Rules
3.2.1. High-Frequency Layers Pre-Fusion
3.2.2. Low-Frequency Layers Pre-Fusion
4. Discussion
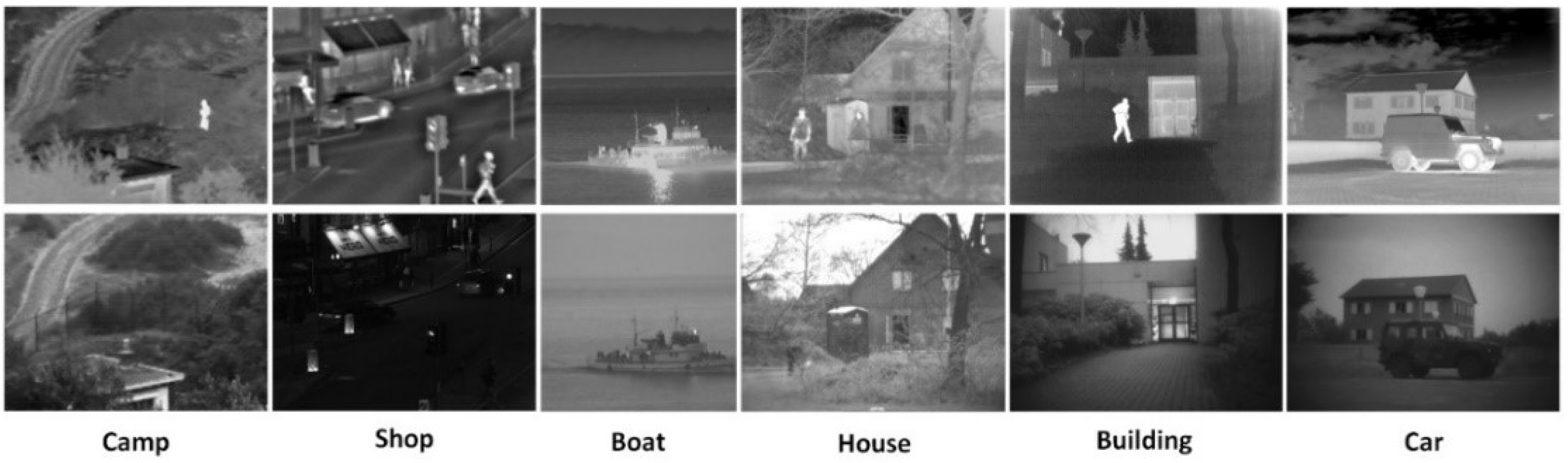
4.1. Experimental Setup
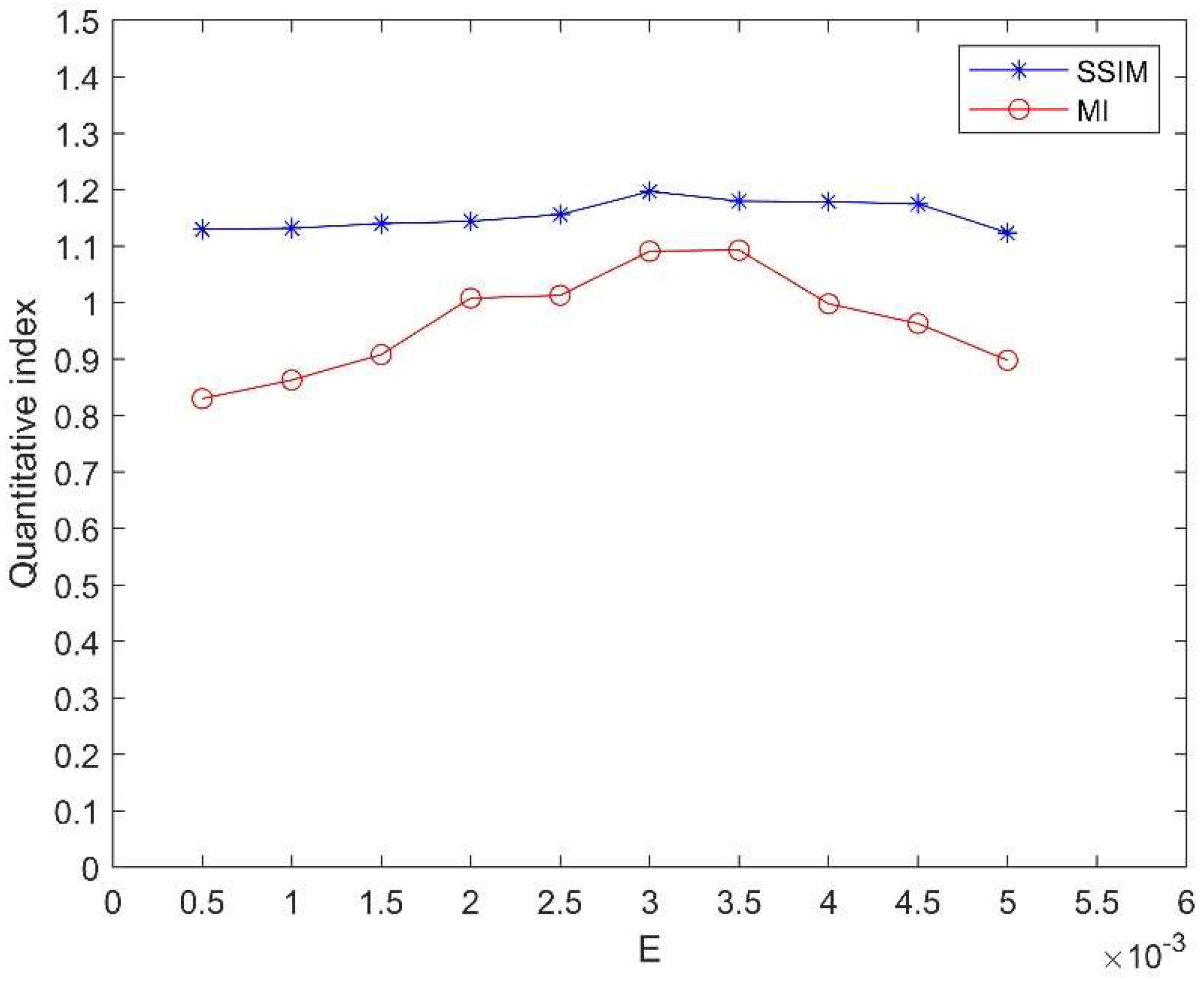
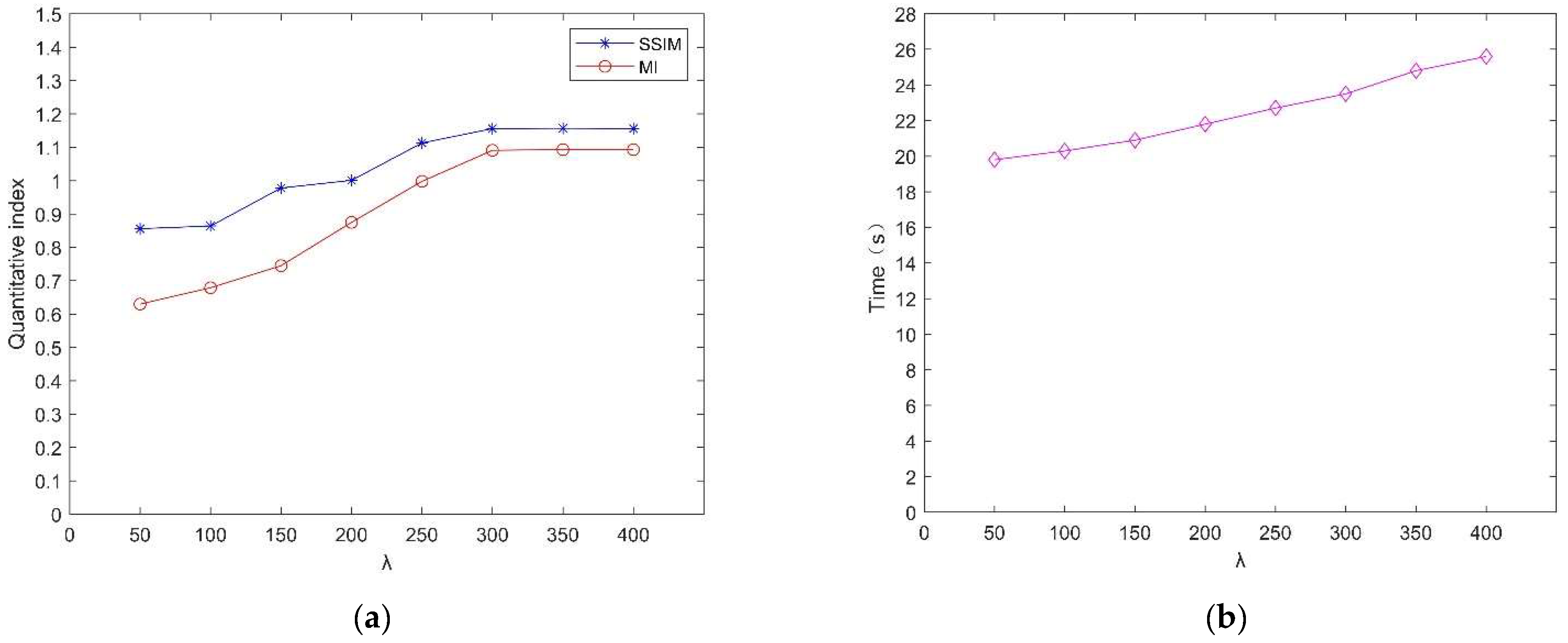
4.2. Parameter Settings
- The discussion of
- The discussion of
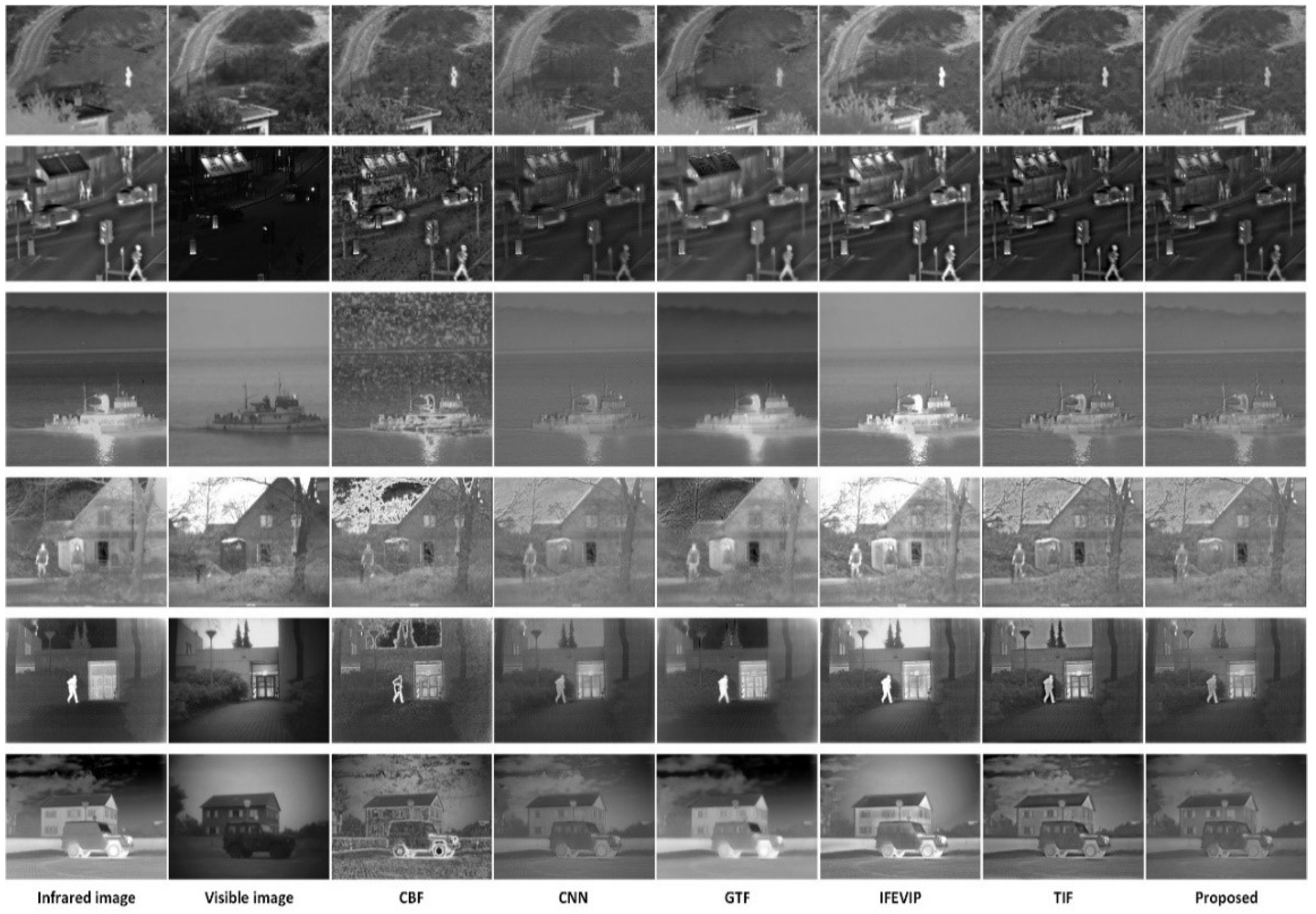
4.3. Noise-Free Image Fusion and Evaluation
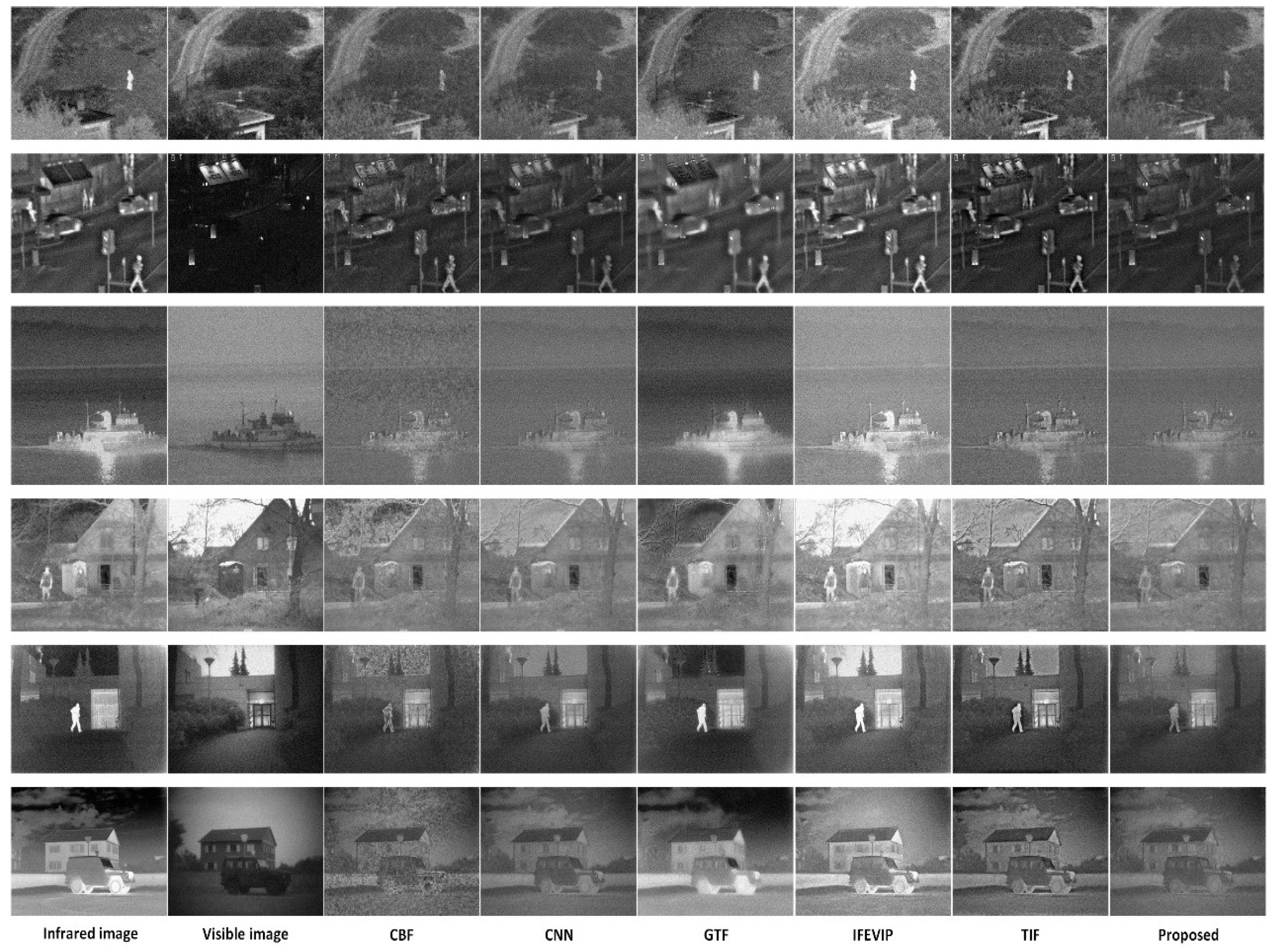
4.3.1. Subjective Evaluation
4.3.2. Objective Evaluation
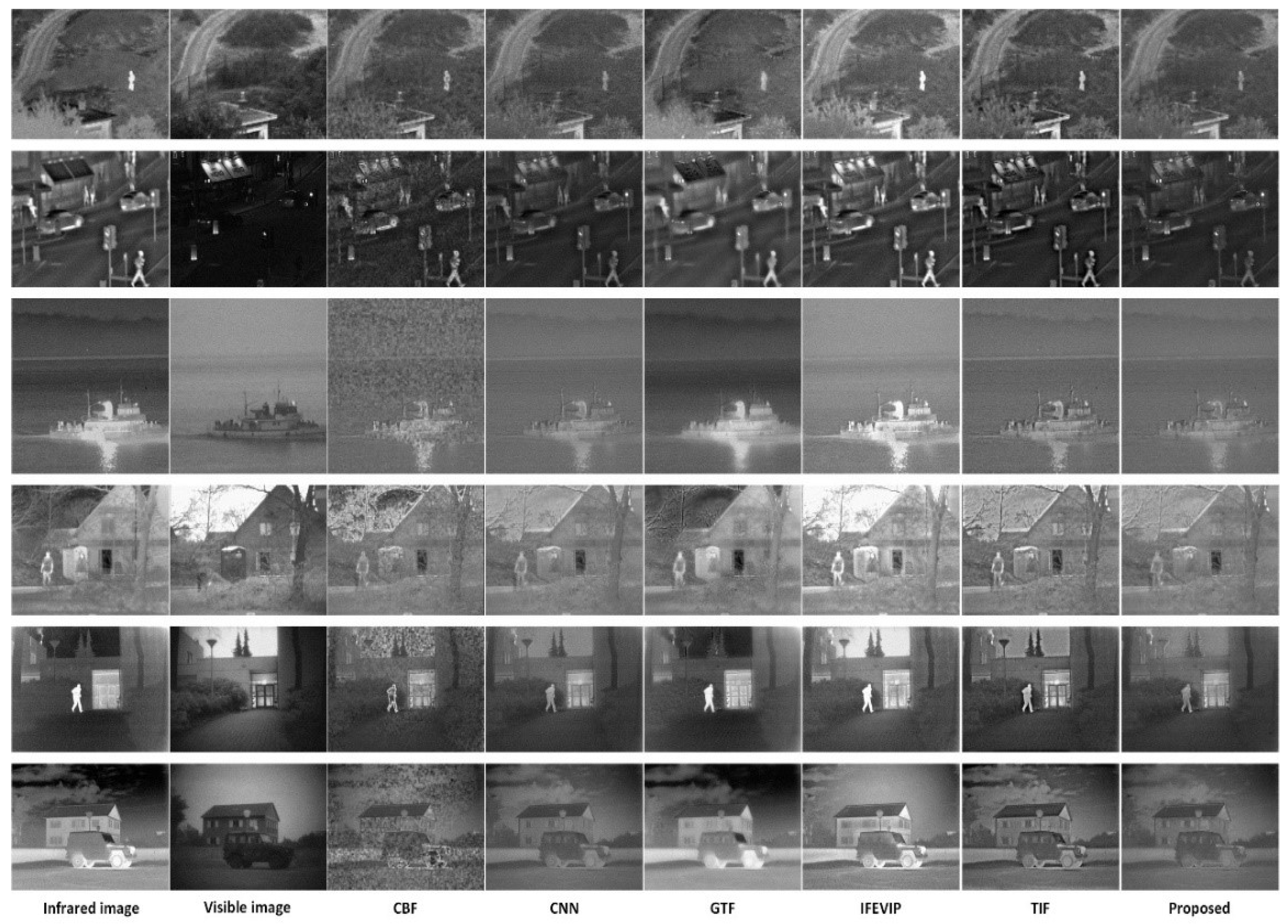
4.4. Noisy Image Fusion and Evaluation
4.4.1. Subjective Evaluation
4.4.2. Objective Evaluation
4.5. Computational Efficiency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hu, Y.; Xu, C.; Li, Z.; Lei, F.; Feng, B.; Chu, L.; Nie, C.; Wang, D. Detail enhancement multi-exposure image fusion based on homomorphic filtering. Electronics 2022, 11, 1211. [Google Scholar] [CrossRef]
- Su, Y.; Tang, C.; Li, B.; Qiu, Y.; Zheng, T.; Lei, Z. Greyscale image encoding and watermarking based on optical asymmetric cryptography and variational image decomposition. J. Mod. Opt. 2018, 66, 377–389. [Google Scholar] [CrossRef]
- Kowsher, M.; Alam, M.A.; Uddin, M.J.; Ahmed, F.; Ullah, M.W.; Islam, M.R. Detecting third umpire decisions & automated scoring system of cricket. In Proceedings of the 2019 International Conference on Computer, Communication, Chemical, Materials and Electronic Engineering (IC4ME2), Rajshahi, Bangladesh, 11–12 July 2019; pp. 1–8. [Google Scholar]
- Liu, Y.; Chen, X.; Cheng, J.; Peng, H.; Wang, Z. Infrared and visible image fusion with convolutional neural networks. Int. J. Wavelets Multiresolut. Inf. Process. 2018, 16, 1850018. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, X.; Ward, R.K.; Wang, Z.J. Image fusion with convolutional sparse representation. IEEE Signal Process. Lett. 2016, 23, 1882–1886. [Google Scholar] [CrossRef]
- Luo, X.; Li, X.; Wang, P.; Qi, S.; Guan, J.; Zhang, Z. Infrared and visible image fusion based on NSCT and stacked sparse autoencoders. Multimed. Tools Appl. 2018, 77, 22407–22431. [Google Scholar] [CrossRef]
- Hui, L.; Wu, X.J.; Kittler, J. Infrared and visible image fusion using a deep learning framework. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018. [Google Scholar]
- Cardone, D.; Spadolini, E.; Perpetuini, D.; Filippini, C.; Chiarelli, A.M.; Merla, A. Automated warping procedure for facial thermal imaging based on features identification in the visible domain. Infrared Phys. Technol. 2020, 112, 103595. [Google Scholar] [CrossRef]
- Singh, S.; Gyaourova, A.; Bebis, G.; Pavlidis, I. Infrared and visible image fusion for face recognition. Biometric Technology for Human Identification; SPIE: Reno, NV, USA, 2004; Volume 5404, pp. 585–597. [Google Scholar] [CrossRef]
- Wang, N.Y.; Wang, W.L.; Guo, X.R. A new image fusion method based on improved PCNN and multiscale decomposition. Adv. Mater. Res. 2014, 834–836, 1011–1015. [Google Scholar] [CrossRef]
- Zhu, J.; Jin, W.; Li, L.; Han, Z.; Wang, X. Multiscale infrared and visible image fusion using gradient domain guided image filtering. Infrared Phys. Technol. 2018, 89, 8–19. [Google Scholar] [CrossRef]
- Ma, J.; Zhou, Z.; Wang, B.; Zong, H. Infrared and visible image fusion based on visual saliency map and weighted least square optimization. Infrared Phys. Technol. 2017, 82, 8–17. [Google Scholar] [CrossRef]
- Zhang, P.; Yuan, Y.; Fei, C.; Pu, T.; Wang, S. Infrared and visible image fusion using co-occurrence filter. Infrared Phys. Technol. 2018, 93, 223–231. [Google Scholar] [CrossRef]
- Duan, C.; Wang, Z.; Xing, C.; Lu, S. Infrared and visible image fusion using multi-scale edge-preserving decomposition and multiple saliency features. Optik 2020, 228, 165775. [Google Scholar] [CrossRef]
- Candes, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? arXiv 2009, arXiv:0912.3599. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, M. Image fusion using multiscale edge-preserving decomposition based on weighted least squares filter. IET Image Process. 2014, 8, 183–190. [Google Scholar] [CrossRef]
- Salehi, H. Image de-speckling based on the coefficient of variation, improved guided filter, and fast bilateral filter. Int. J. Image Graph. 2021, 21, 2250036. [Google Scholar] [CrossRef]
- Li, S.; Kang, X.; Hu, J. Image fusion with guided filtering. IEEE Trans. Image Process. 2013, 22, 2864–2875. [Google Scholar]
- Aharon, M.; Elad, M.; Bruckstein, A. K-SVD: An algorithm for designing overcomplete dictionaries for sparse representation. IEEE Trans. Signal Process. 2006, 54, 4311–4322. [Google Scholar] [CrossRef]
- Donoho, D.L.; Tsaig, Y.; Drori, I.; Starck, J.L. Sparse solution of underdetermined systems of linear equations by stagewise orthogonal matching pursuit. IEEE Trans. Inf. Theory 2012, 58, 1094–1121. [Google Scholar] [CrossRef]
- Yang, F.; Li, J.; Xu, S.H.; Pan, G.F. The research of a video segmentation algorithm based on image fusion in the wavelet domain. In Proceedings of the 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Smart Structures and Materials in Manufacturing and Testing, Dalian, China, 26–29 April 2010; Volume 7659, pp. 279–285. [Google Scholar]
- Shreyamsha Kumar, B.K. Image fusion based on pixel significance using cross bilateral filter. Signal Image Video Process. 2015, 9, 1193–1204. [Google Scholar] [CrossRef]
- Ma, J.; Chen, C.; Li, C.; Huang, J. Infrared and visible image fusion via gradient transfer and total variation minimization. Inf. Fusion 2016, 31, 100–109. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Bai, X.; Zhang, L. Infrared and visual image fusion through infrared feature extraction and visual information preservation. Infrared Phys. Technol. 2017, 83, 227–237. [Google Scholar] [CrossRef]
- Bavirisetti, D.P.; Dhuli, R. Two-scale image fusion of visible and infrared images using saliency detection. Infrared Phys. Technol. 2016, 76, 52–64. [Google Scholar] [CrossRef]
- Chibani, Y. Additive integration of SAR features into multispectral SPOT images by means of the à trous wavelet decomposition. ISPRS J. Photogramm. Remote Sens. 2006, 60, 306–314. [Google Scholar] [CrossRef]
- Xydeas, C.S.; Pv, V. Objective image fusion performance measure. Electron. Lett. 2000, 56, 181–193. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Blum, R.S. A new automated quality assessment algorithm for night vision image fusion. In Proceedings of the 2007 41st Annual Conference on Information Sciences and Systems, Baltimore, MD, USA, 14–16 March 2007; pp. 518–523. [Google Scholar]
- Qu, G.; Zhang, D.; Yan, P. Information measure for performance of image fusion. Electron. Lett. 2002, 38, 313–315. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Jagalingam, P.; Hegde, A.V. A Review of Quality Metrics for Fused Image. Aquat. Procedia 2015, 4, 133–142. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source Images | Index | CBF | CNN | GTF | IFEVIP | TIF | Proposed |
|---|---|---|---|---|---|---|---|
| Camp | EN | 6.601 | 6.761 | 6.820 | 6.901 | 6.403 | 6.797 |
| 0.317 | 0.422 | 0.459 | 0.380 | 0.359 | 0.480 | ||
| 0.517 | 0.550 | 0.475 | 0.520 | 0.561 | 0.568 | ||
| MI | 0.889 | 0.905 | 0.933 | 0.786 | 0.945 | 1.080 | |
| 1.213 | 1.109 | 1.090 | 1.224 | 1.200 | 1.297 | ||
| 58.467 | 58.548 | 57.782 | 56.807 | 58.362 | 58.933 | ||
| Shop | EN | 6.559 | 6.807 | 6.739 | 6.883 | 6.608 | 6.890 |
| 0.301 | 0.453 | 0.408 | 0.474 | 0.408 | 0.497 | ||
| 0.447 | 0.438 | 0.294 | 0.384 | 0.446 | 0.472 | ||
| MI | 0.818 | 1.225 | 0.878 | 1.479 | 1.050 | 1.595 | |
| 0.980 | 1.050 | 0.764 | 1.120 | 1.018 | 1.194 | ||
| 59.637 | 59.889 | 59.222 | 59.177 | 59.712 | 59.997 | ||
| Boat | EN | 6.141 | 6.756 | 6.788 | 6.283 | 6.608 | 6.867 |
| 0.273 | 0.481 | 0.475 | 0.471 | 0.317 | 0.496 | ||
| 0.439 | 0.569 | 0.469 | 0.488 | 0.547 | 0.576 | ||
| MI | 0.474 | 0.771 | 1.315 | 1.381 | 0.540 | 1.378 | |
| 1.145 | 1.200 | 1.095 | 1.217 | 1.229 | 1.295 | ||
| 59.674 | 59.833 | 59.159 | 58.148 | 59.804 | 59.826 | ||
| House | EN | 6.783 | 6.640 | 6.512 | 6.989 | 6.871 | 7.142 |
| 0.305 | 0.453 | 0.456 | 0.394 | 0.368 | 0.456 | ||
| 0.474 | 0.474 | 0.470 | 0.508 | 0.568 | 0.574 | ||
| MI | 0.727 | 0.896 | 1.027 | 1.535 | 0.791 | 1.696 | |
| 1.128 | 1.173 | 1.100 | 1.224 | 1.202 | 1.293 | ||
| 59.720 | 60.172 | 59.458 | 58.560 | 60.068 | 60.198 | ||
| Building | EN | 6.935 | 6.882 | 7.114 | 7.272 | 7.031 | 7.349 |
| 0.278 | 0.476 | 0.440 | 0.407 | 0.341 | 0.540 | ||
| 0.467 | 0.485 | 0.435 | 0.509 | 0.532 | 0.556 | ||
| MI | 0.807 | 1.036 | 1.169 | 1.140 | 0.965 | 1.182 | |
| 1.117 | 1.131 | 0.991 | 1.213 | 1.159 | 1.294 | ||
| 59.175 | 59.349 | 58.736 | 58.004 | 59.235 | 59.943 | ||
| Car | EN | 6.787 | 6.627 | 7.113 | 7.144 | 6.906 | 7.506 |
| 0.230 | 0.421 | 0.412 | 0.455 | 0.351 | 0.527 | ||
| 0.414 | 0,374 | 0.366 | 0.424 | 0.468 | 0.476 | ||
| MI | 0.421 | 0.672 | 0.844 | 0.671 | 0.726 | 0.926 | |
| 0.941 | 1.030 | 0.878 | 1.138 | 1.062 | 1.189 | ||
| 58.131 | 58.371 | 57.875 | 57.137 | 58.315 | 58.494 |
| Source Images | Index | CBF | CNN | GTF | IFEVIP | TIF | Proposed |
|---|---|---|---|---|---|---|---|
| Camp | EN | 6.942 | 6.890 | 7.131 | 7.264 | 7.123 | 7.277 |
| 0.285 | 0.322 | 0.496 | 0.343 | 0.311 | 0.429 | ||
| 0.474 | 0.456 | 0.498 | 0.492 | 0.552 | 0.553 | ||
| MI | 0.870 | 0.863 | 0.711 | 1.008 | 0.926 | 1.091 | |
| 1.160 | 1.132 | 0.948 | 1.144 | 1.070 | 1.197 | ||
| 57.926 | 57.995 | 56.992 | 55.801 | 57.671 | 58.291 | ||
| Shop | EN | 6.878 | 6.972 | 6.983 | 7.237 | 6.881 | 7.519 |
| 0.326 | 0.325 | 0.407 | 0.449 | 0.338 | 0.520 | ||
| 0.441 | 0.426 | 0.302 | 0.472 | 0.467 | 0.495 | ||
| MI | 0.960 | 0.748 | 0.700 | 1.510 | 0.866 | 1.330 | |
| 1.009 | 0.854 | 0.615 | 1.063 | 0.924 | 1.094 | ||
| 59.593 | 59.645 | 58.742 | 58.782 | 59.508 | 59.928 | ||
| Boat | EN | 6.612 | 6.764 | 6.225 | 6.855 | 6.653 | 6.995 |
| 0.268 | 0.384 | 0.515 | 0.332 | 0.283 | 0.521 | ||
| 0.485 | 0.493 | 0.487 | 0.501 | 0.524 | 0.542 | ||
| MI | 0.452 | 0.550 | 0.957 | 0.831 | 0.461 | 0.977 | |
| 1.136 | 1.063 | 0.910 | 1.128 | 1.064 | 1.195 | ||
| 59.324 | 59.322 | 58.362 | 57.566 | 59.267 | 59.689 | ||
| House | EN | 6.910 | 6.925 | 7.314 | 7.211 | 7.129 | 7.494 |
| 0.276 | 0.346 | 0.421 | 0.348 | 0.309 | 0.481 | ||
| 0.471 | 0.448 | 0.487 | 0.500 | 0.424 | 0.551 | ||
| MI | 0.492 | 0.603 | 0.568 | 0.425 | 0.585 | 0.649 | |
| 1.128 | 1.100 | 0.945 | 1.147 | 1.064 | 1.193 | ||
| 59.680 | 59.083 | 58.975 | 58.188 | 59.787 | 59.928 | ||
| Building | EN | 7.152 | 7.150 | 7.339 | 7.545 | 7.300 | 7.062 |
| 0.267 | 0.325 | 0.476 | 0.356 | 0.303 | 0.486 | ||
| 0.464 | 0.442 | 0.449 | 0.469 | 0.519 | 0.538 | ||
| MI | 0.735 | 0.880 | 0.711 | 0.867 | 0.786 | 0.965 | |
| 1.088 | 1.063 | 0.840 | 1.137 | 1.027 | 1.193 | ||
| 58.978 | 59.066 | 58.121 | 57.501 | 58.904 | 59.885 | ||
| Car | EN | 6.927 | 6.897 | 7.755 | 7.362 | 7.107 | 7.780 |
| 0.252 | 0.342 | 0.458 | 0.405 | 0.300 | 0.535 | ||
| 0.431 | 0.387 | 0.375 | 0.428 | 0.464 | 0.493 | ||
| MI | 0.416 | 0.500 | 1.175 | 1.118 | 0.542 | 1.342 | |
| 1.008 | 0.983 | 0.718 | 1.078 | 0.953 | 1.089 | ||
| 58.048 | 58.197 | 57.378 | 56.827 | 58.108 | 58.435 |
| Method | CBF | CNN | GTF | IFEVIP | TIF | Proposed |
|---|---|---|---|---|---|---|
| Time/s | 10.73 | 23.16 | 2.91 | 1.34 | 1.03 | 22.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, J.; Zhang, Y.; Lin, Z.; Li, Y.; Wang, C.; Hu, Y.; Huang, F.; Yao, J. Fusion of Infrared and Visible Images Based on Optimized Low-Rank Matrix Factorization with Guided Filtering. Electronics 2022, 11, 2003. https://doi.org/10.3390/electronics11132003
Ji J, Zhang Y, Lin Z, Li Y, Wang C, Hu Y, Huang F, Yao J. Fusion of Infrared and Visible Images Based on Optimized Low-Rank Matrix Factorization with Guided Filtering. Electronics. 2022; 11(13):2003. https://doi.org/10.3390/electronics11132003
Chicago/Turabian StyleJi, Jingyu, Yuhua Zhang, Zhilong Lin, Yongke Li, Changlong Wang, Yongjiang Hu, Fuyu Huang, and Jiangyi Yao. 2022. "Fusion of Infrared and Visible Images Based on Optimized Low-Rank Matrix Factorization with Guided Filtering" Electronics 11, no. 13: 2003. https://doi.org/10.3390/electronics11132003