
A Novel Approach for the Implementation of Fast Frequency Control in Low-Inertia Power Systems Based on Local Measurements and Provision Costs


Abstract
:1. Introduction
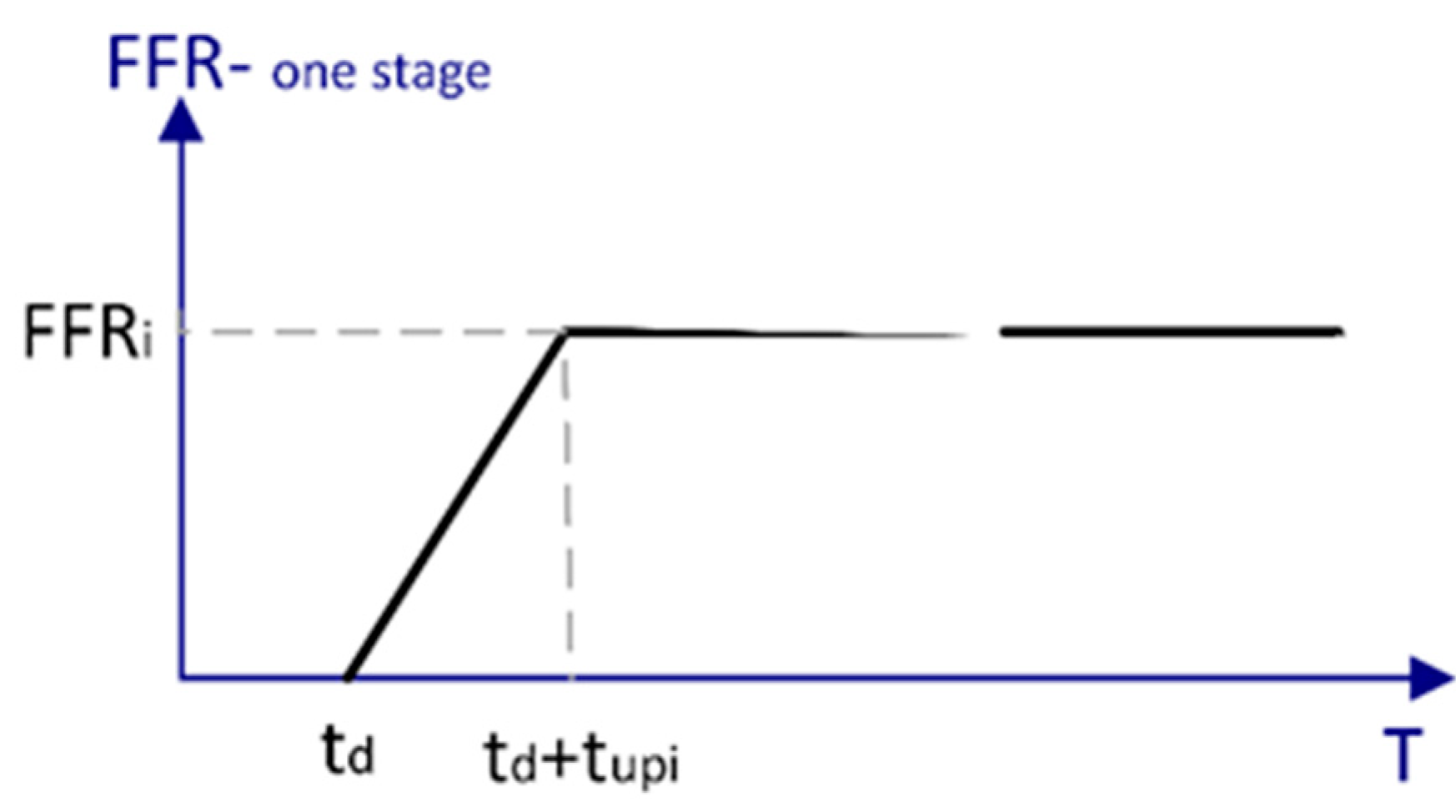
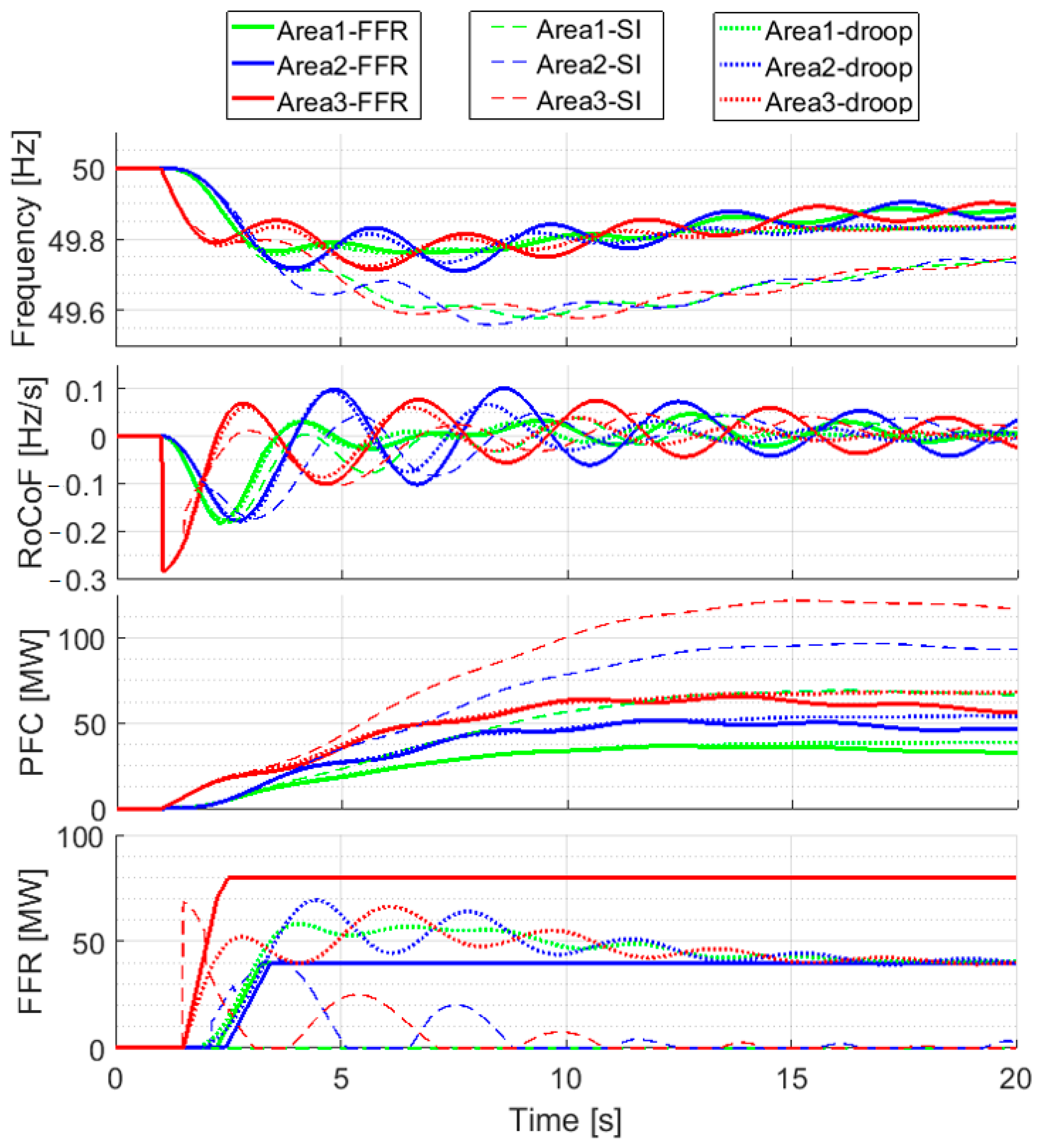
- Contrary to SI and droop-based frequency control, the proposed FFR control delivers constant power in reference to the RoCoF level. Therefore, it effectively utilizes the fast response capability of fast-acting resources and has a bigger contribution towards restraining the frequency nadir.
- The proposed frequency control strategy uses only local measurements of the RoCoF. This eliminates the need for placing new and additional communication infrastructure. Most importantly, unpredictable time delays due to data transmissions are avoided, resulting in an even faster and more reliable response of FFR.
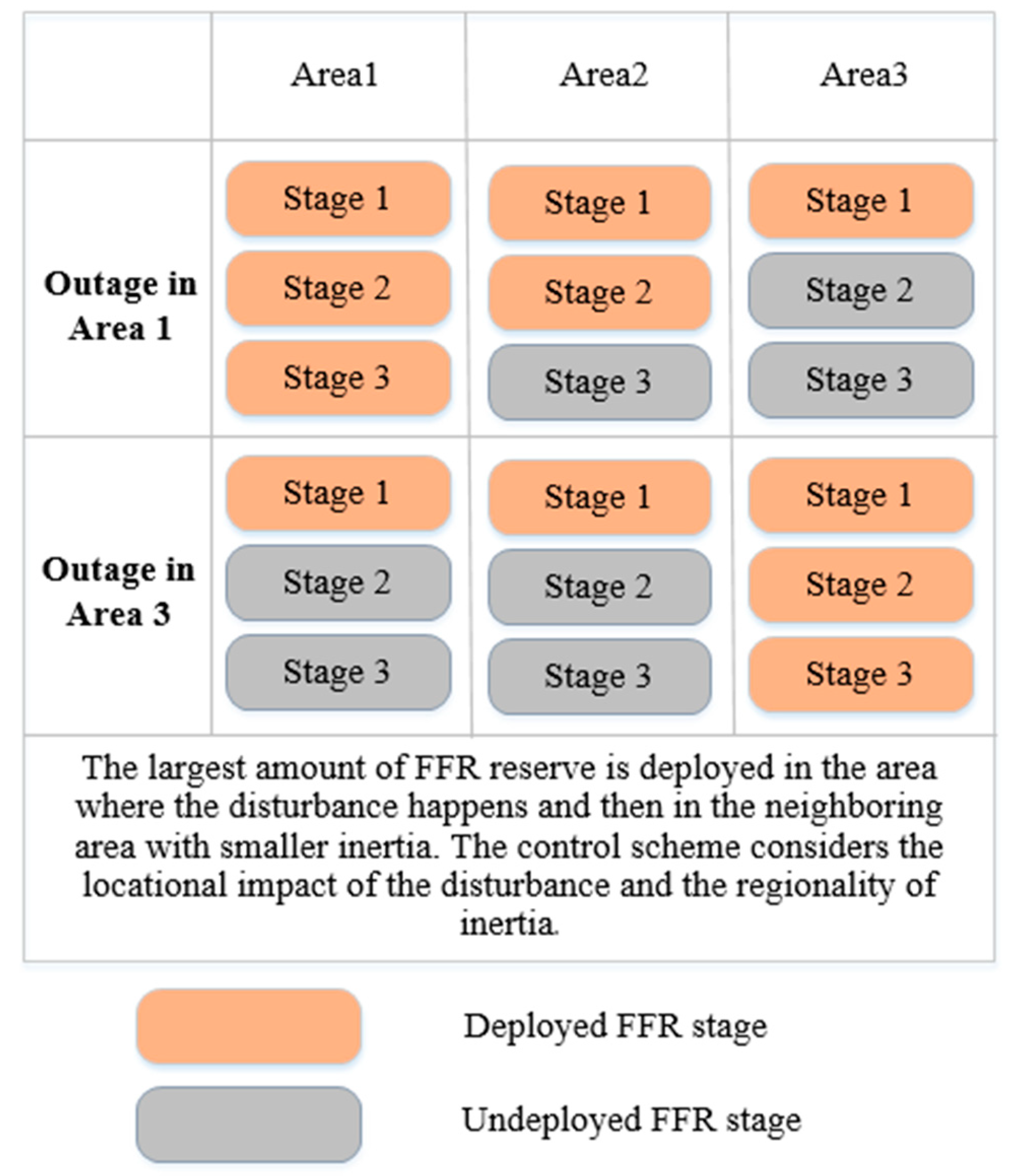
- During the transient period after a disturbance, frequency drops and the RoCoF have the largest values near the location of the disturbance and in low-inertia areas. Consequently, the FFR reserve, which is triggered by locally measured RoCoF, is most deployed in the area where the disturbance occurred, which retains disturbance propagation.
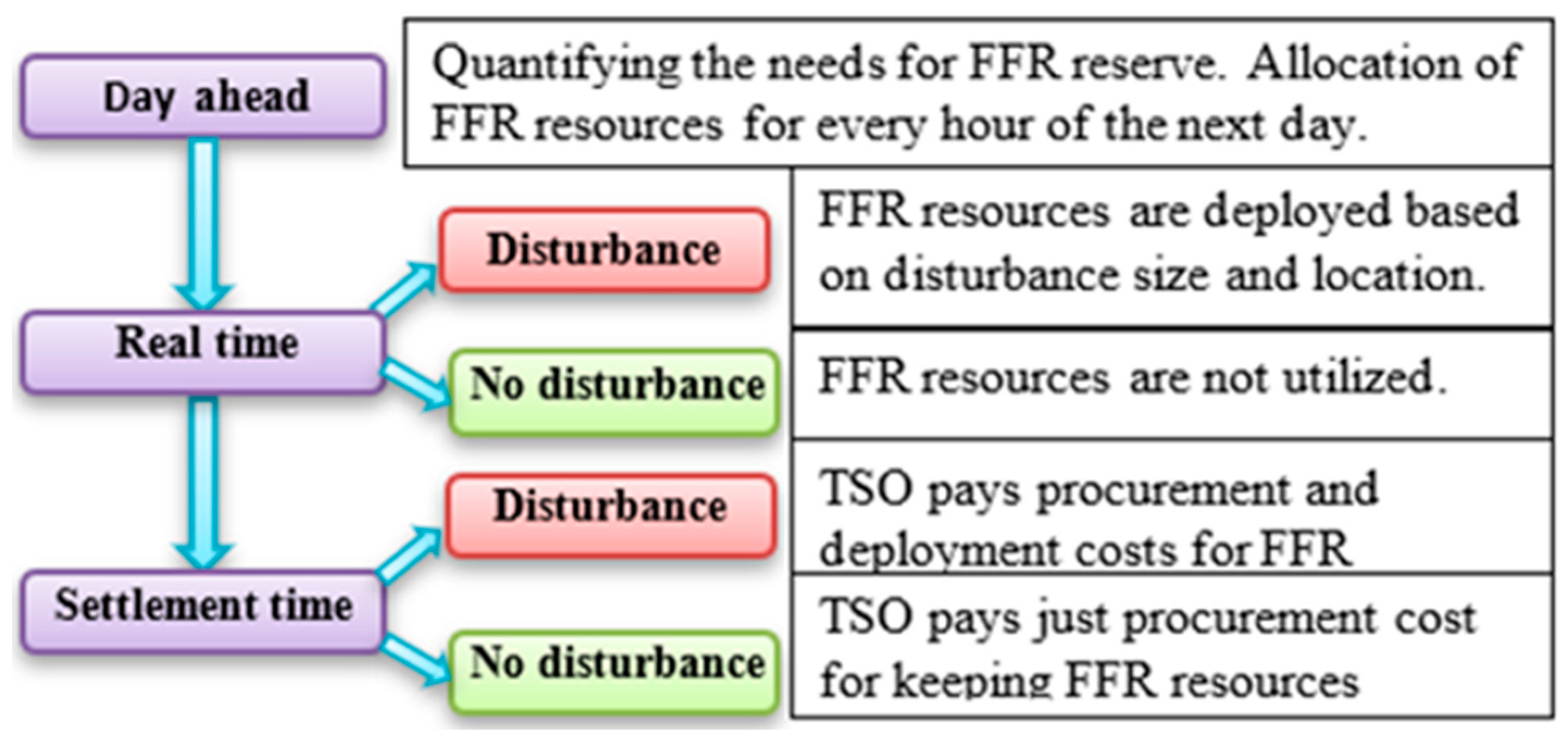
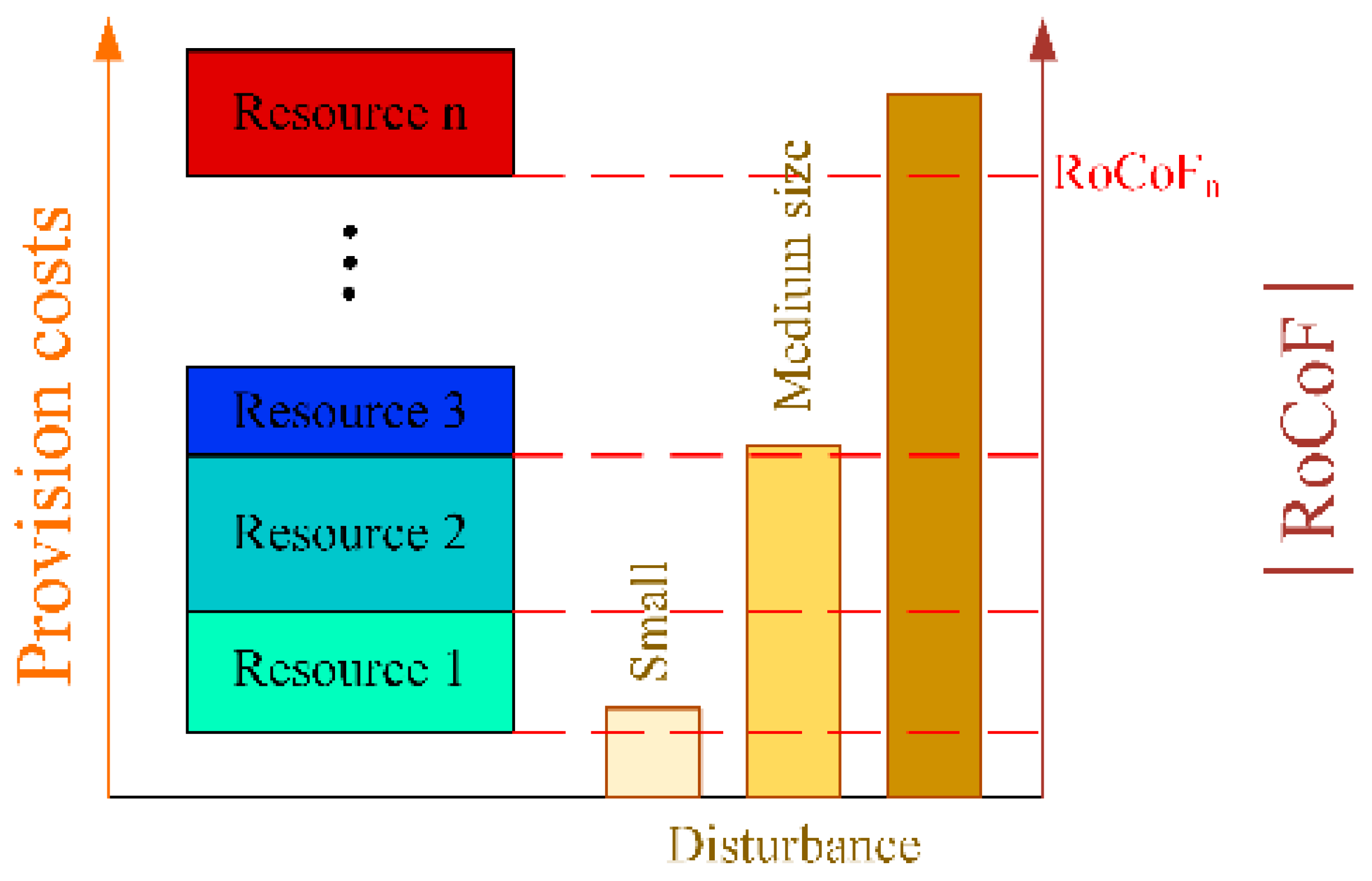
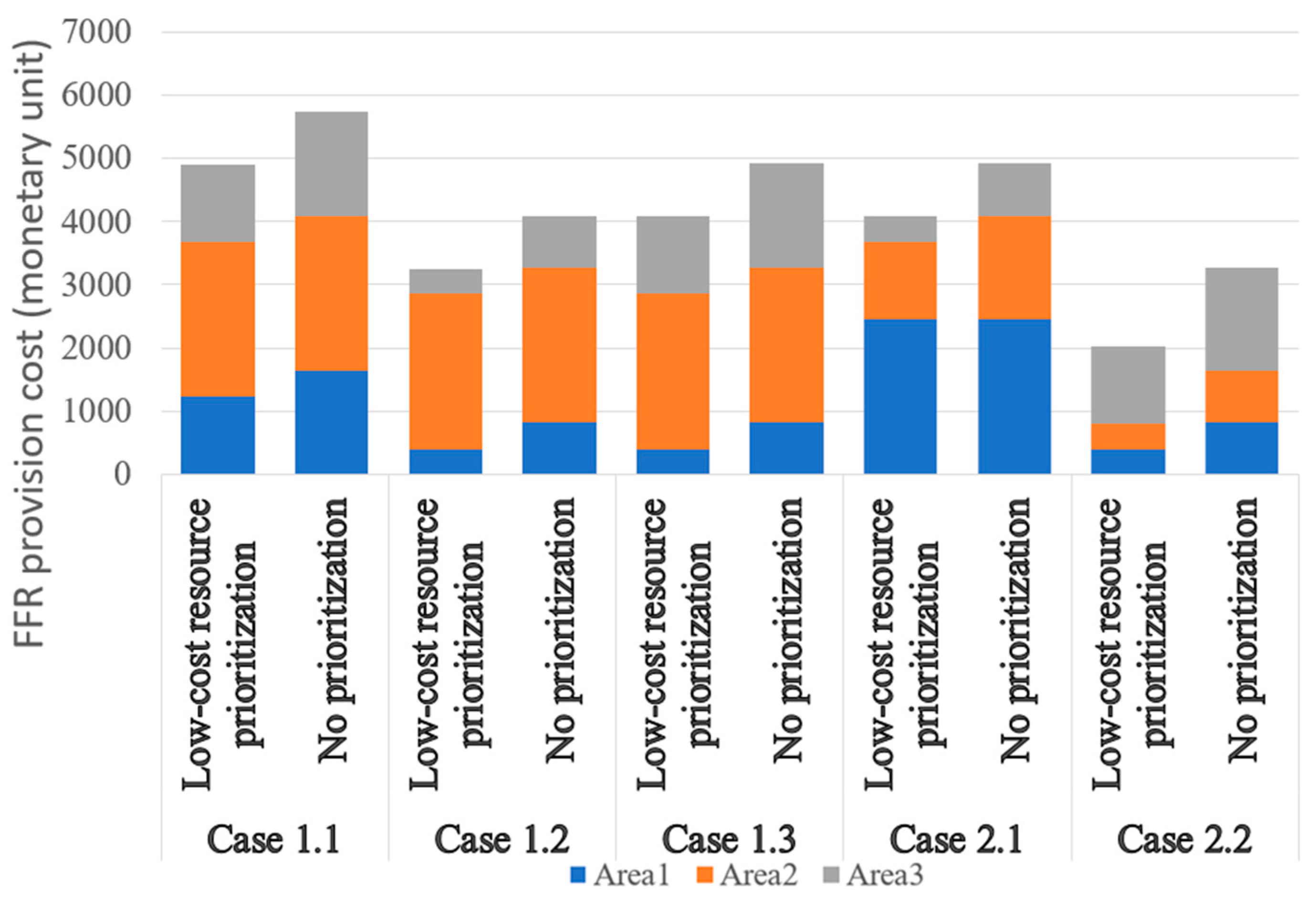
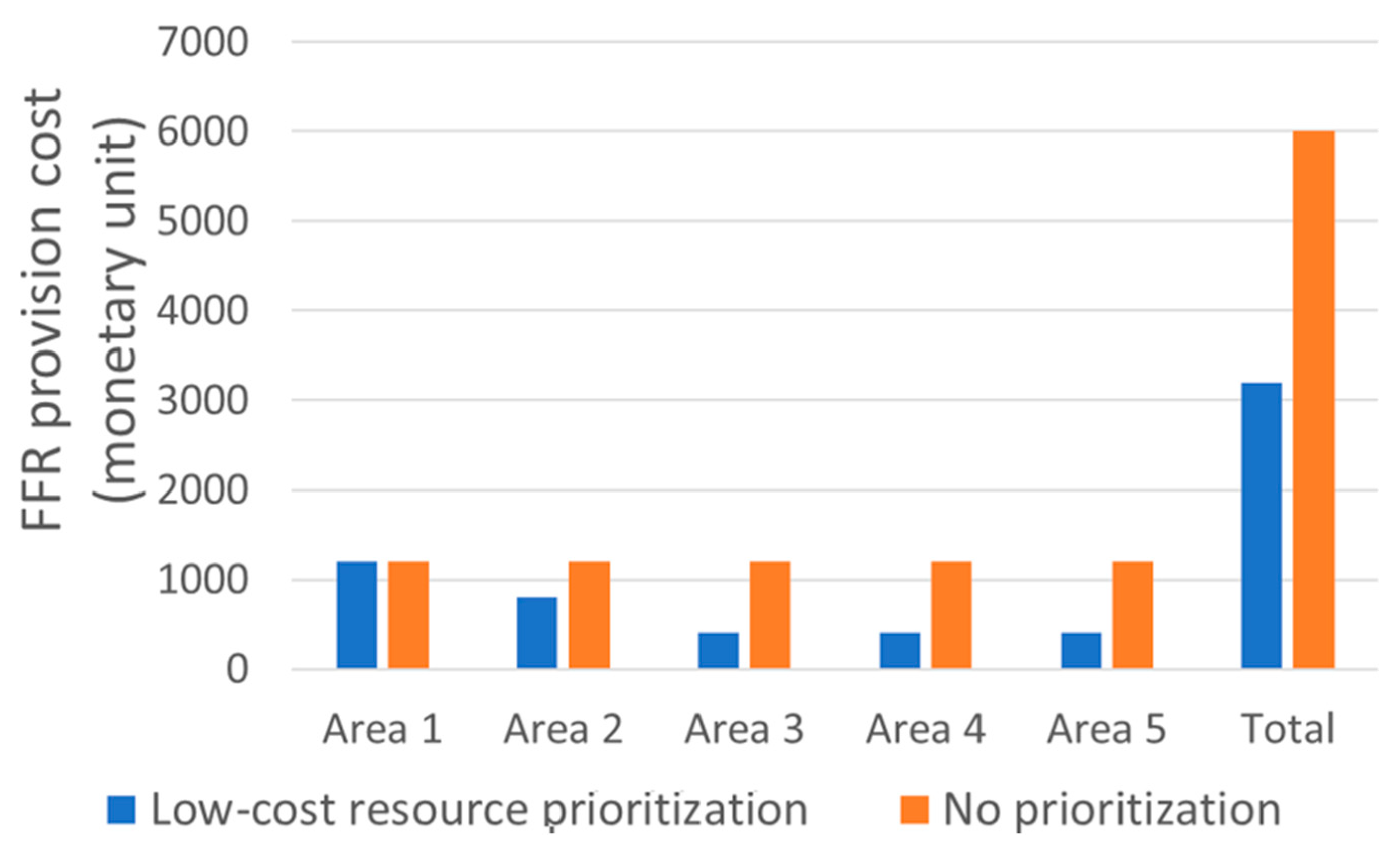
- The proposed multi-stage FFR control strategy ranks reserves based on the provision cost and prioritizes the use of low-cost reserves in case of less severe disturbances. The multi-stage approach gives priority to the low-cost FFR reserve in the case of less critical disturbances and enables TSO to reduce reserve provision costs.
- System operators: From an economic perspective, the proposed control strategy reduces provision costs, since the deployed FFR reserves are proportional to the size of the disturbance, and low-cost FFR resources are prioritized. From a technical perspective, the FFR control strategy deploys more reserves in parts of the system that are more affected by disturbances and thus contributes more to frequency stability.
- Consumers: Since the operational costs are mapped to the consumers through the cost of electricity, reduced frequency reserve costs decrease consumer expenses.
- Service providers: The proposed control solution favors FFR resources located in more vulnerable areas (low inertia areas), which can motivate investors to invest in FFR resources in locations that contribute more to system stability. This market-oriented solution leads to efficient investment decisions that can contribute towards a more resilient system.
2. Theoretical Background
3. A Novel Approach for the Implementation of Fast Frequency Control in Low-Inertia Power Systems Based on Local Measurements and Provision Costs
Potential FFR Market Structure That Enables Ranking FFR Resources Based on Reserve Provision Costs
4. Case Studies and Simulation Results
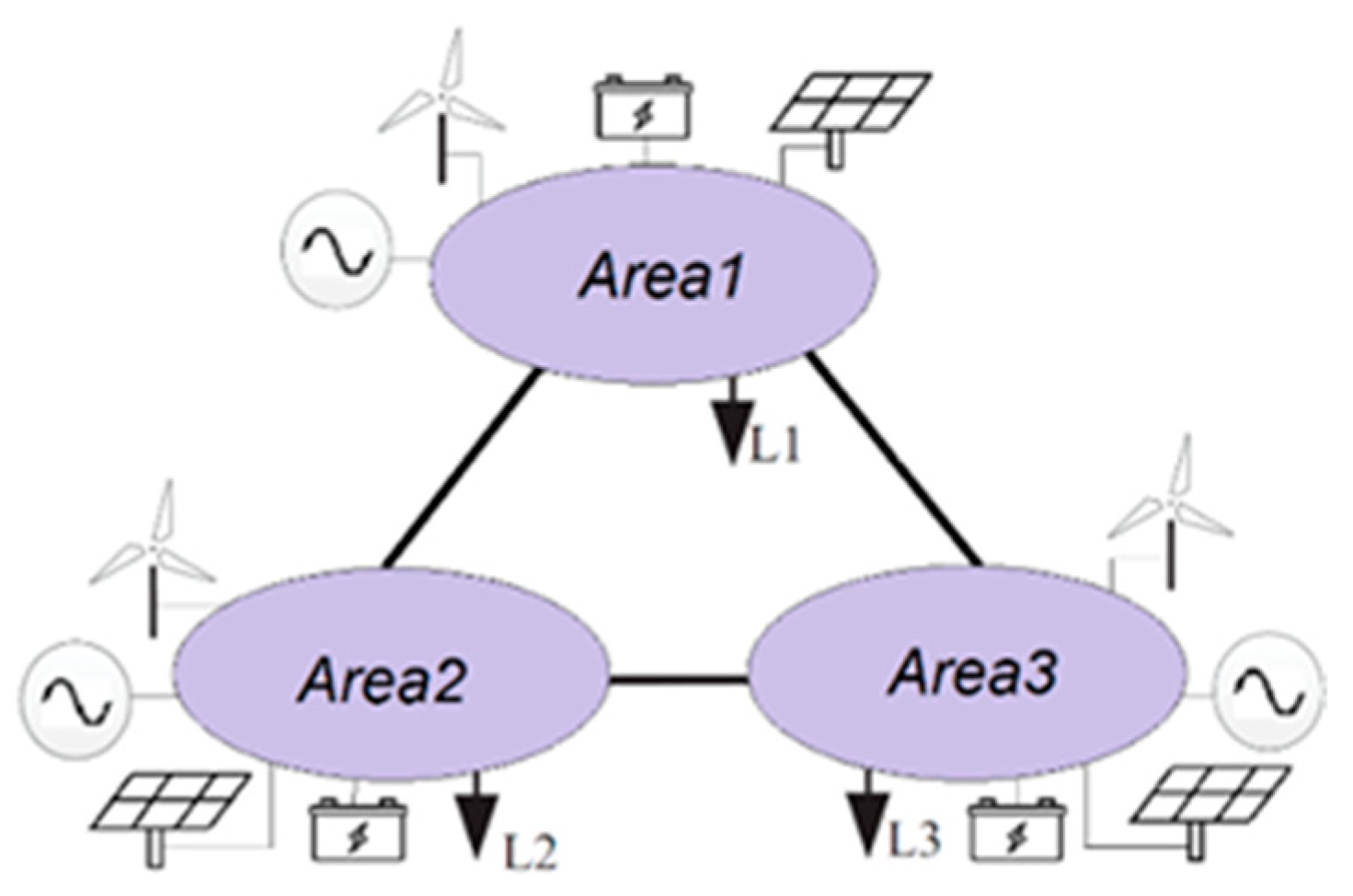
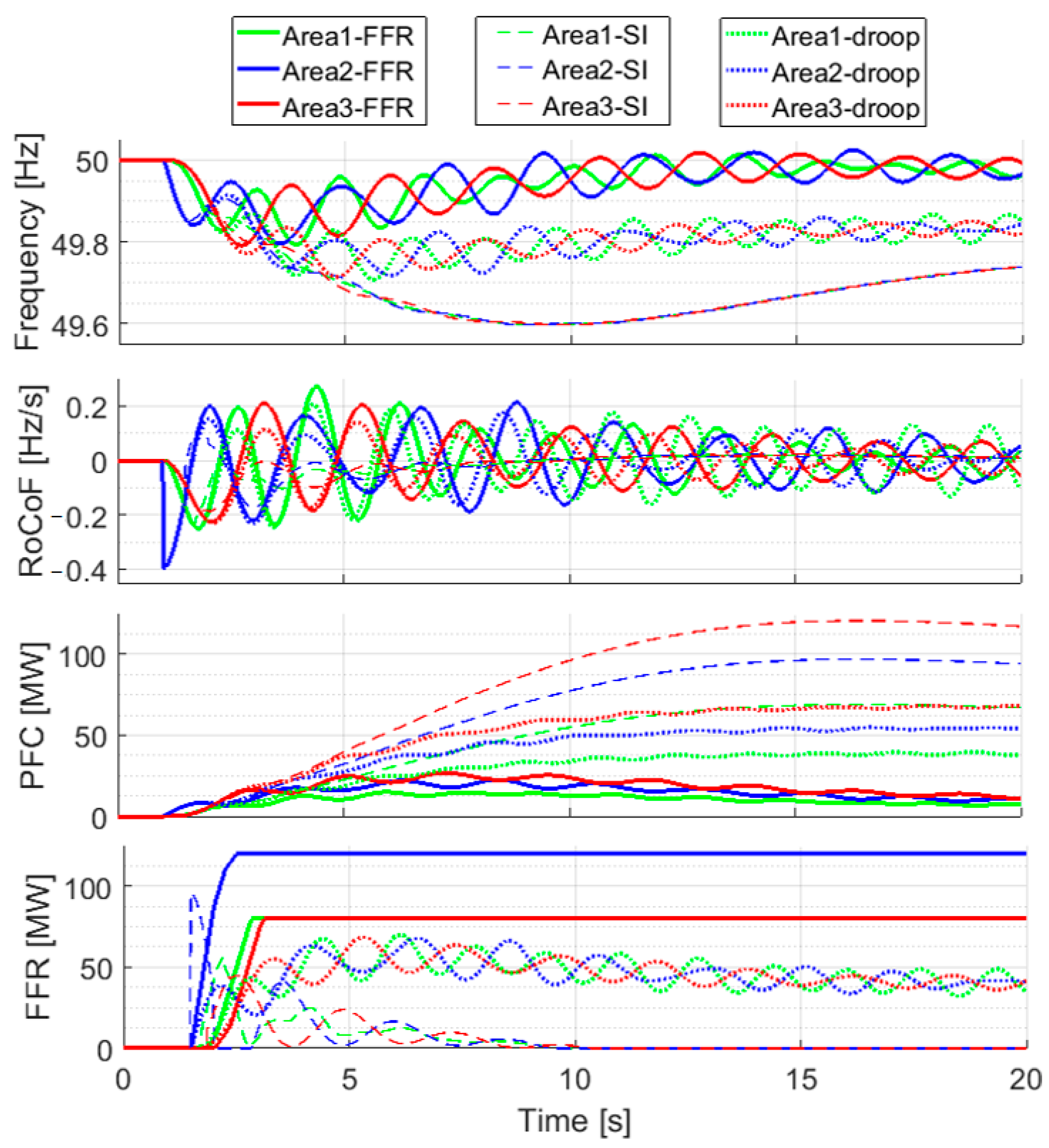
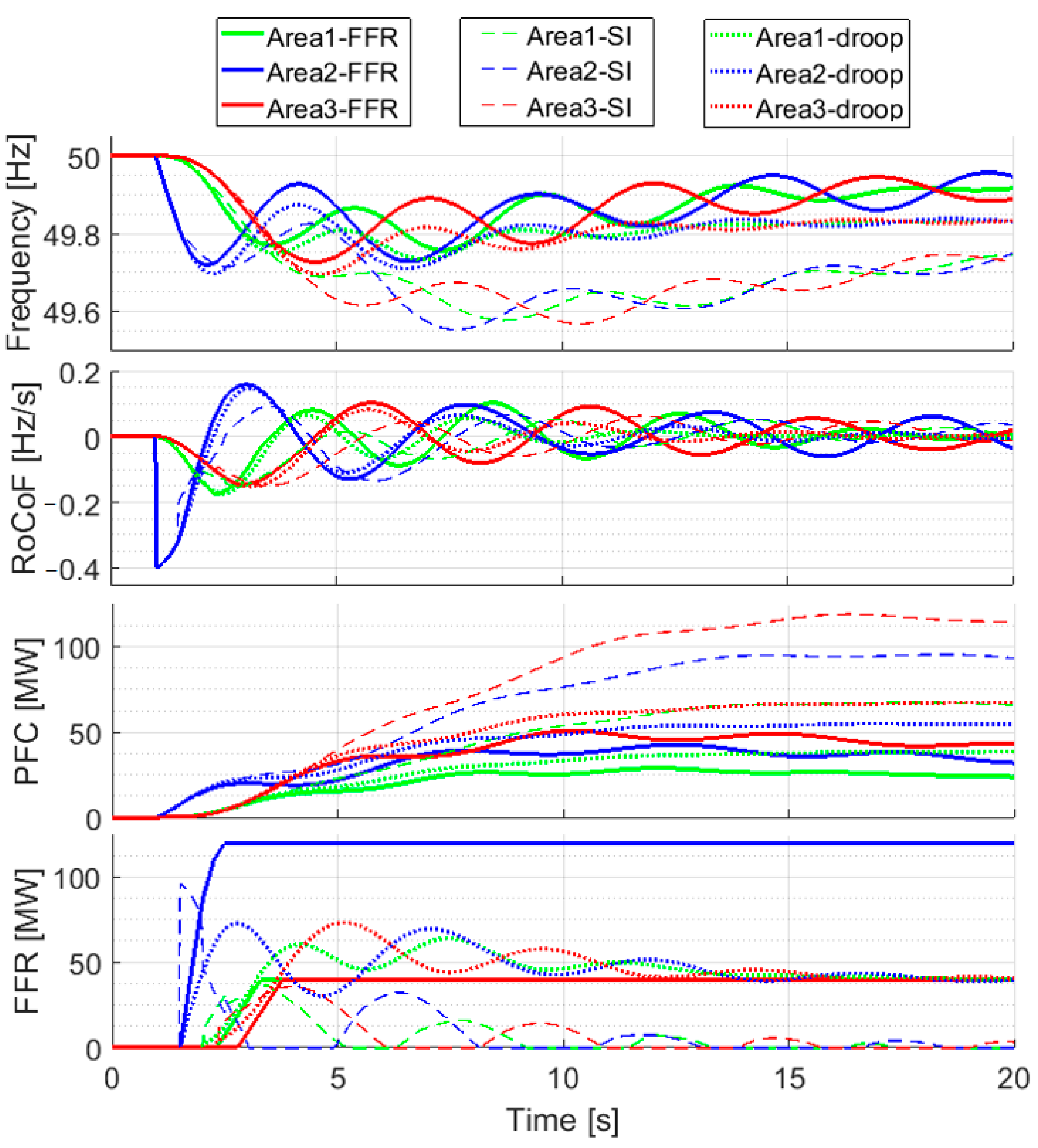
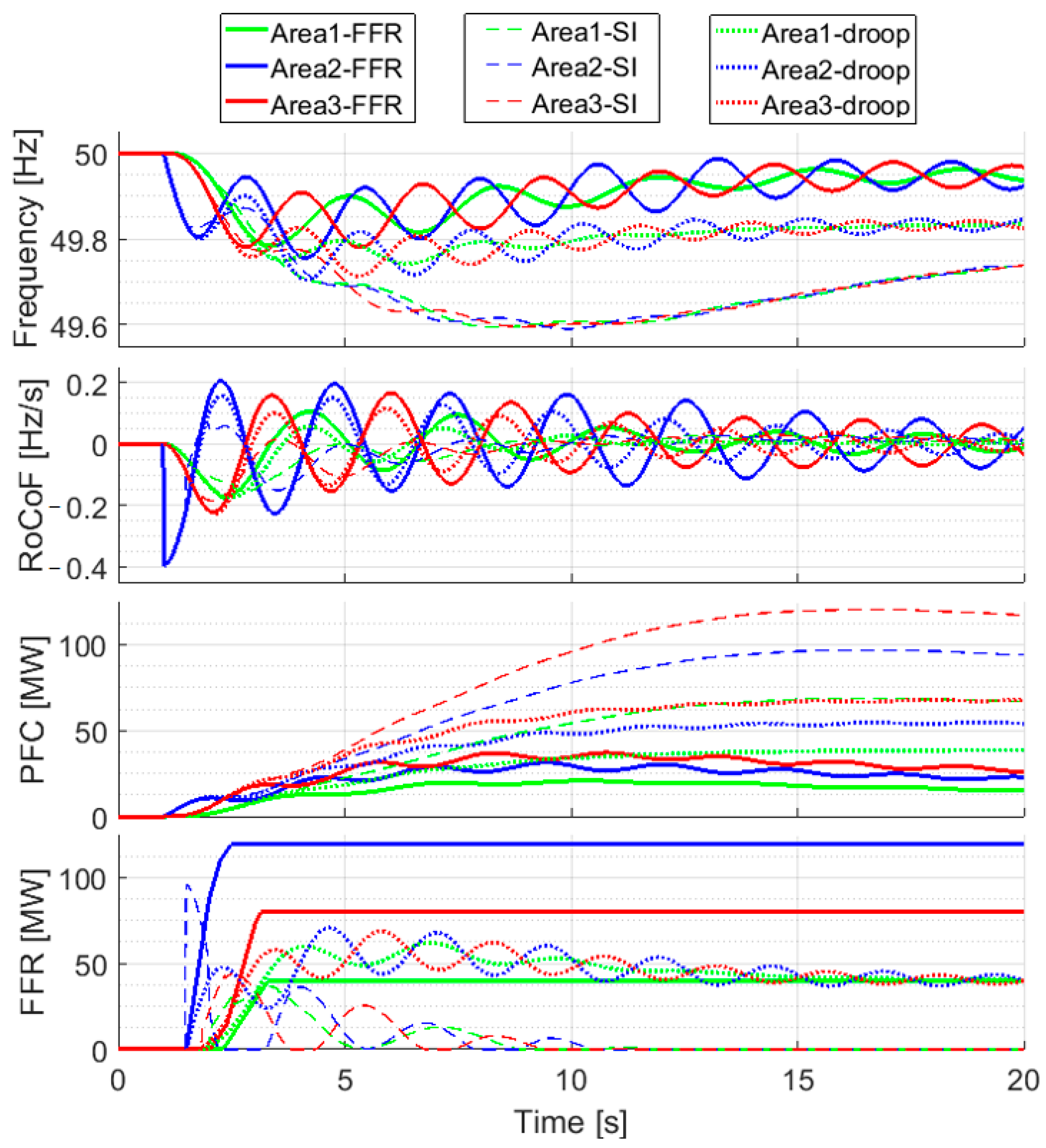
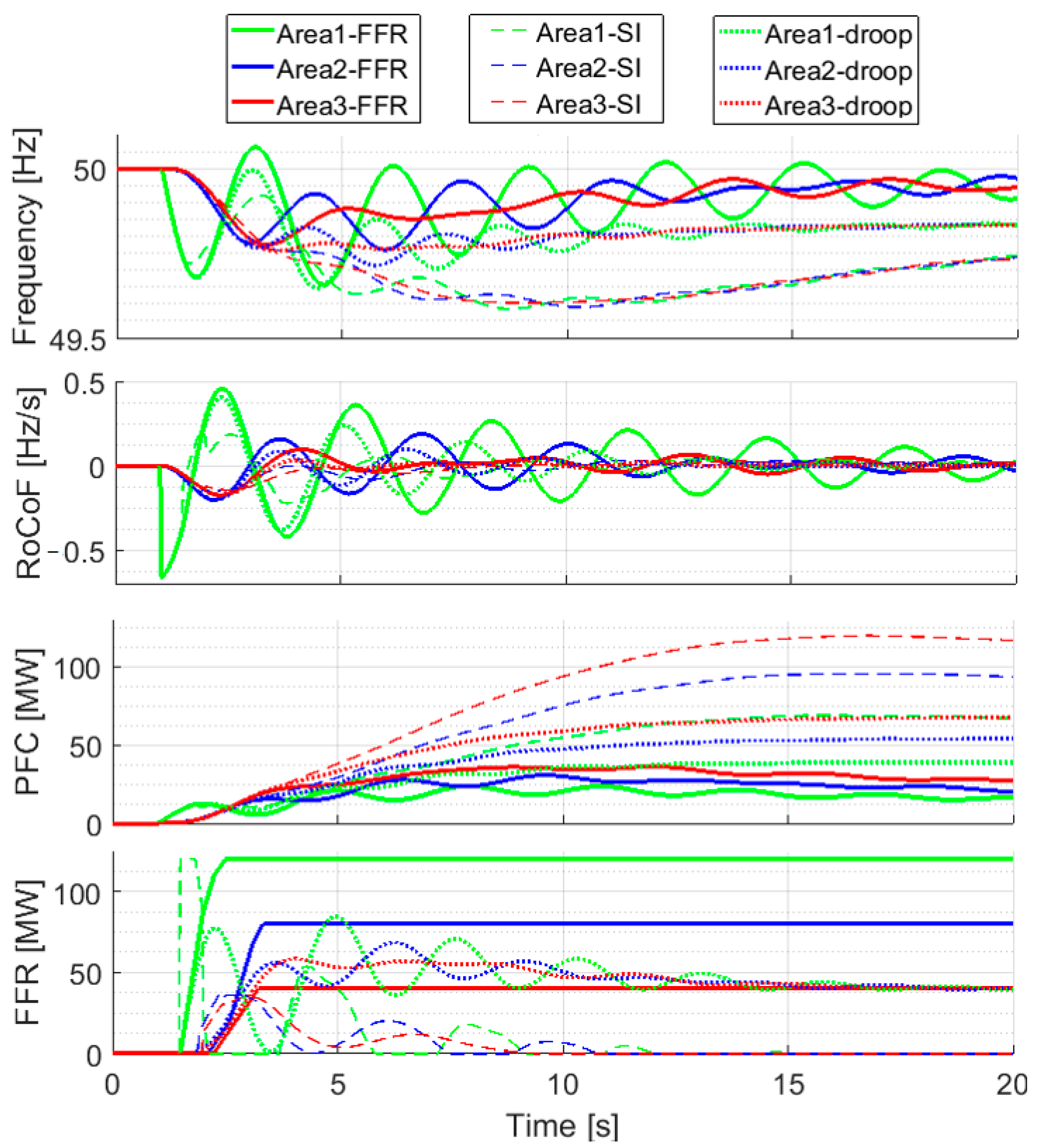
4.1. Simulations on a Simple Three-Area System
- Case 1.1: Strongly coupled areas;
- Case 1.2: Weakly coupled areas;
- Case 1.3: Different lengths of connection lines.
- Case 2.1: Disturbance in a low-inertia area;
- Case 2.2: Disturbance in a high-inertia area.
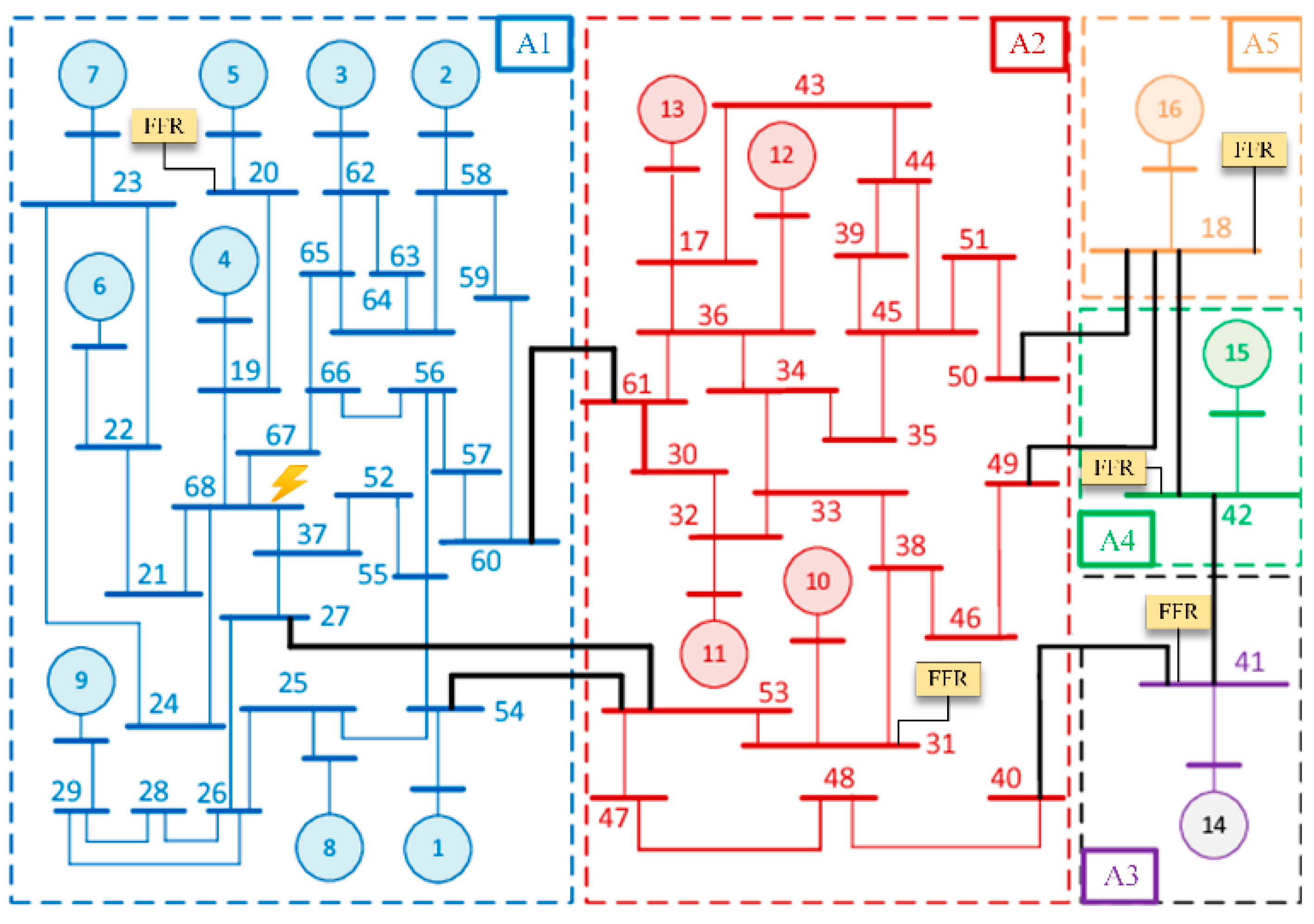
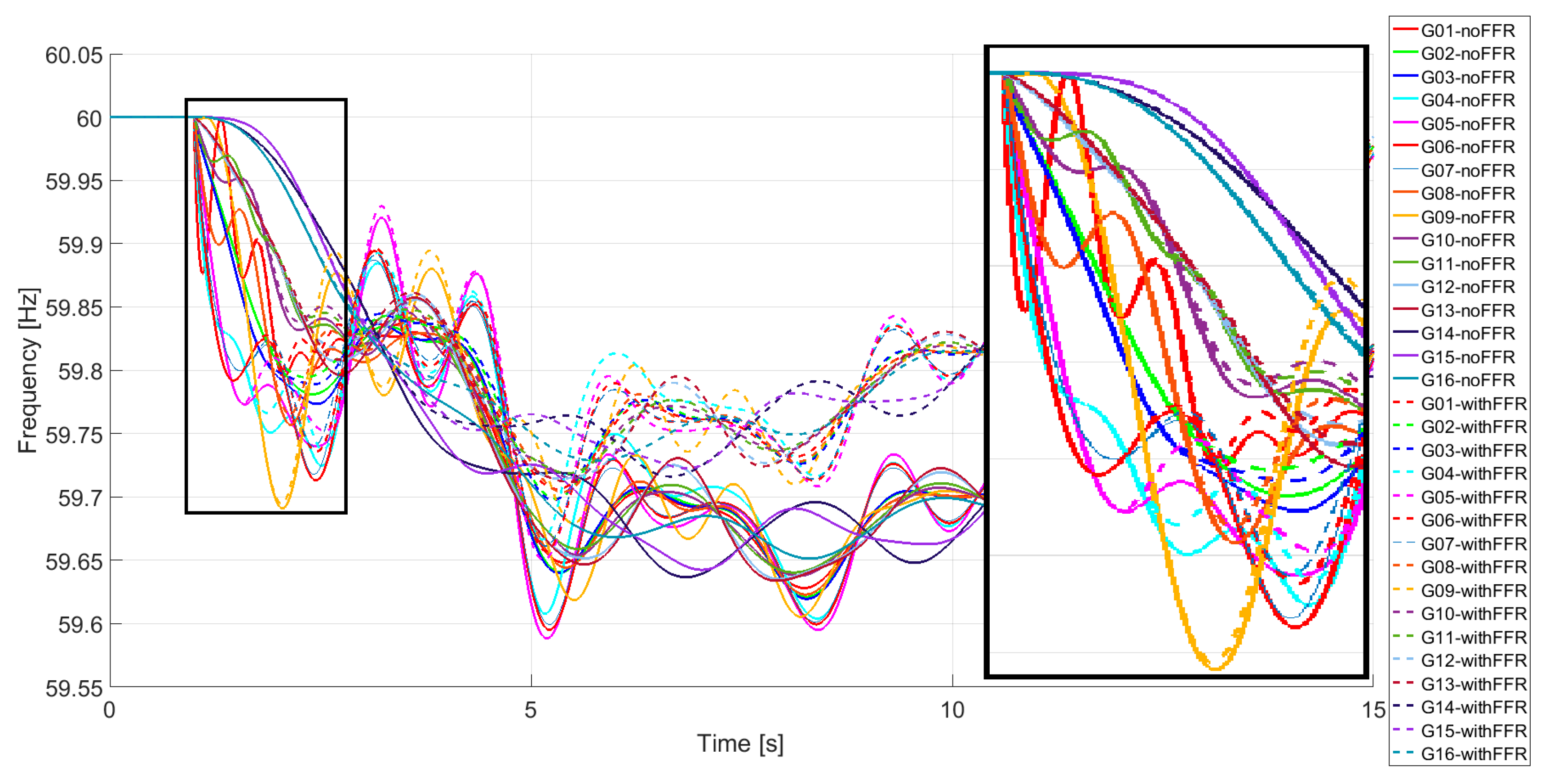
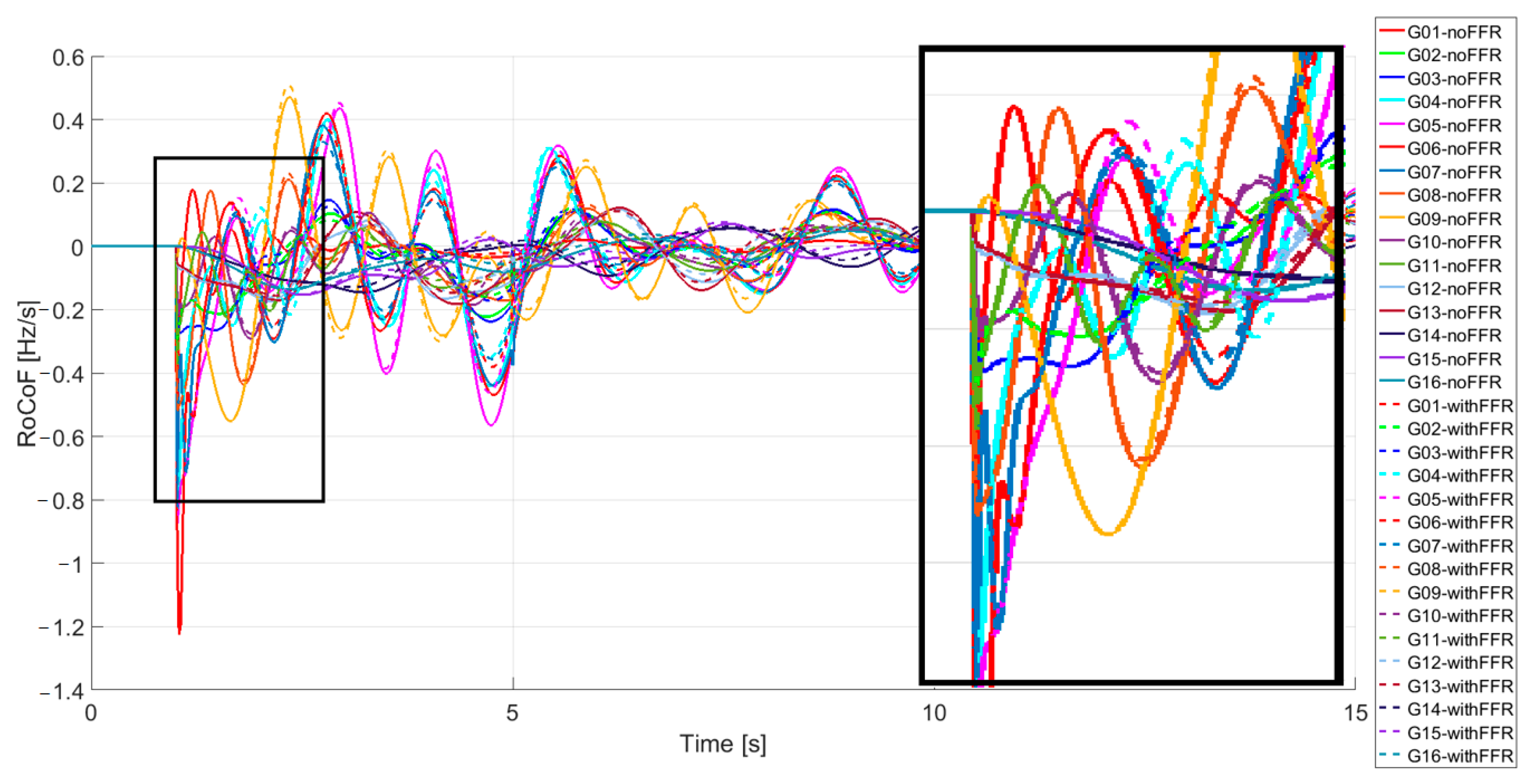
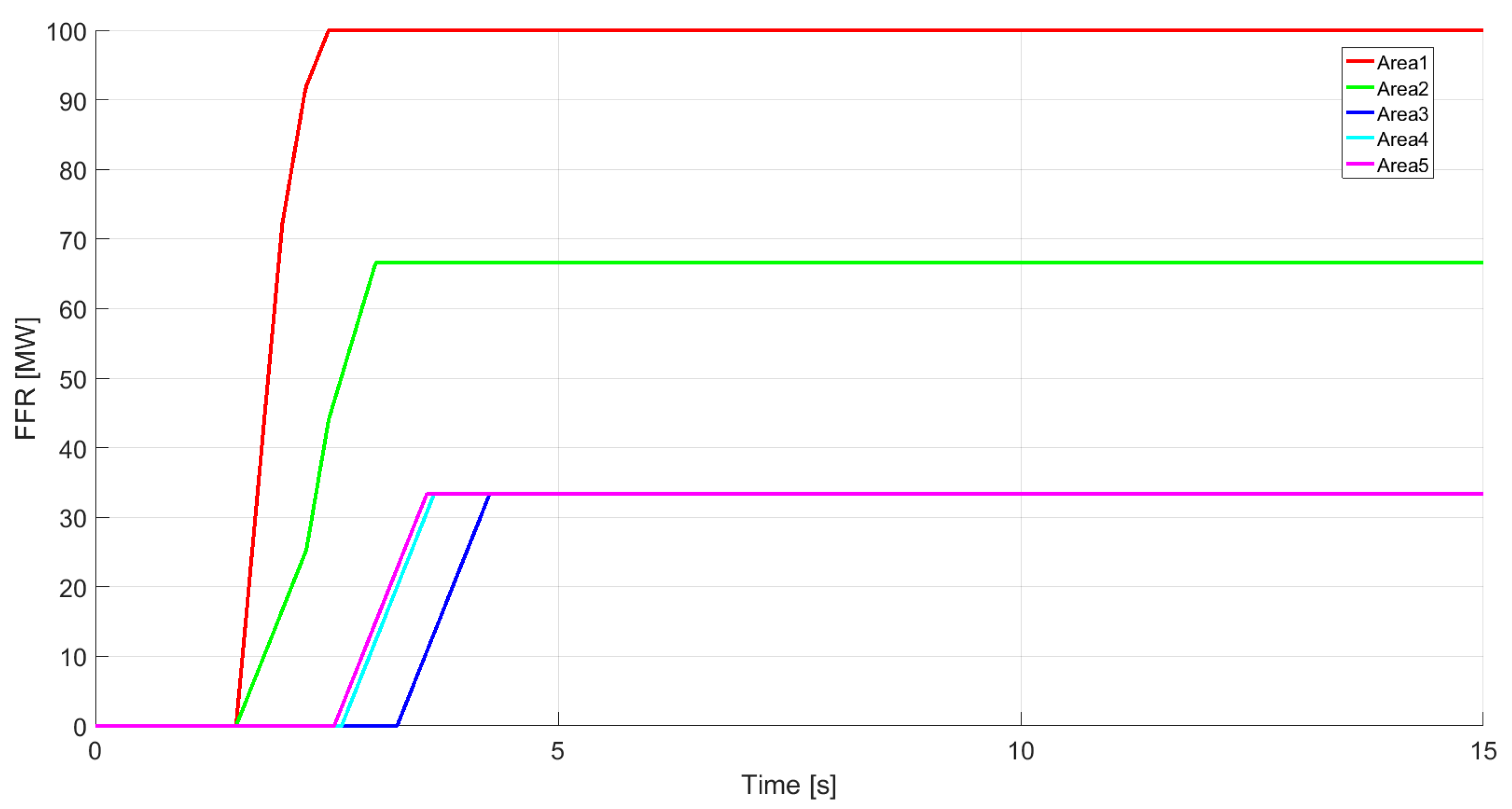
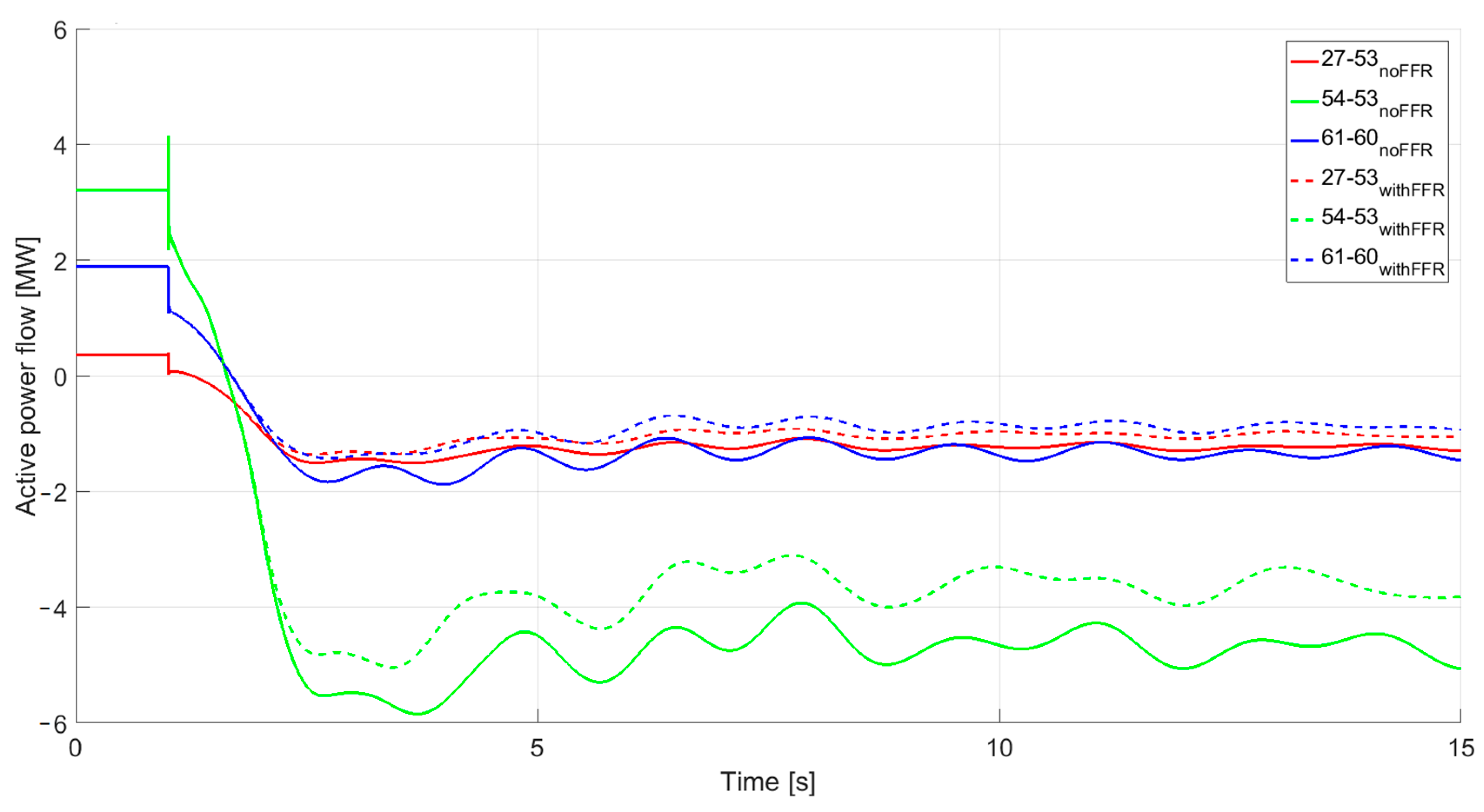
4.2. Simulations on an IEEE 68-Bus System
5. Conclusions
6. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Federico, M.; Florian, D.; Gabriela, H.; David, J.H.; Gregor, V. Foundations and challenges of low-inertia systems (Invited Paper). In Proceedings of the 20th Power Systems Computation Conference (PSCC 2018), Dublin, Ireland, 11–15 June 2018; pp. 1–25. [Google Scholar]
- Jingyang, F.; Hongchang, L.; Yi, T.; Frede, B. On the inertia of future more-electronics power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar]
- Adrees, A.; Milanović, J.V.; Mancarella, P. Effect of inertia heterogeneity on frequency dynamics of low-inertia power systems. IET Gener. Transm. Distrib. 2019, 14, 2019. [Google Scholar] [CrossRef]
- Wilson, D.; Yu, J.; Al-Ashwal, N.; Heimisson, B.; Terzija, V. Measuring effective area inertia to determine fast-acting frequency response requirements. Int. J. Electr. Power Energy Syst. 2019, 113, 1–8. [Google Scholar] [CrossRef]
- EirGrid/SONI, Ensuring a Secure, Reliable and Efficient Power System in a Changing Environment, June 2011. Available online: http://www.eirgridgroup.com/site-files/library/EirGrid/Ensuring-a-Secure-Reliable-and-Efficient-Power-System-Report.pdf (accessed on 10 January 2022).
- National Grid ESO, The Enhanced Frequency Control Capability (EFCC) Project Closing down Report, April 2019. Available online: https://www.nationalgrideso.com/document/144566/download (accessed on 10 January 2022).
- Australian Energy Market Operator, Future Power System Security Program—Progress Report, August 2016. Available online: https://www.aemo.com.au/Electricity/National-Electricity-Market-NEM/Security-and-reliability/-/media/823E457AEA5E43BE83DDD56767126BF2.ashx (accessed on 10 January 2022).
- Hong, Q.; Khan, M.A.U.; Henderson, C.; Egea-Àlvarez, A.; Tzelepis, D.; Booth, C. Addressing frequency control challenges in future low-inertia power systems: A great britain perspective. Engineering 2021, 7, 1057–1063. [Google Scholar] [CrossRef]
- O’Sullivan, J.; Rogers, A.; Flynn, D.; Smith, P.; Mullane, A.; O’Malley, M. Studying the maximum instantaneous non-synchronous generation in an Island system-frequency stability challenges in Ireland. IEEE Trans. Power Syst. 2014, 29, 2943–2951. [Google Scholar] [CrossRef] [Green Version]
- EirGrid/SONI, All Island TSO Facilitation of Renewables Studies, Jun 2010. Available online: http://www.eirgridgroup.com/site-files/library/EirGrid/Facilitation-of-Renewables-Report.pdf (accessed on 10 January 2022).
- Australian Energy Market Operator, Power System Security Guideline, January 2022. Available online: https://aemo.com.au/-/media/files/electricity/nem/security_and_reliability/power_system_ops/procedures/so_op_3715-power-system-security-guidelines.pdf?la=en (accessed on 10 February 2022).
- Ulbig, A.; Borsche, T.S.; Andersson, G. Impact of low rotational inertia on power system stability and operation. IFAC Proc. Vol. 2014, 47, 7290–7297. [Google Scholar] [CrossRef] [Green Version]
- Nesje, B. The Need for Inertia in the Nordic Power System. Master’s Thesis, NTNU, Trondheim, Norway, 2015. [Google Scholar]
- Mir, A.S.; Senroy, N. Intelligently controlled flywheel storage for enhanced dynamic performance. IEEE Trans. Sustain. Energy 2019, 10, 2163–2173. [Google Scholar] [CrossRef]
- Nanou, S.I.; Papakonstantinou, A.G.; Papathanassiou, S.A. A generic model of two-stage grid-connected PV systems with primary frequency response and inertia emulation. Electr. Power Syst. Res. 2015, 127, 186–196. [Google Scholar] [CrossRef]
- Fu, Y.; Zhang, X.; Hei, Y.; Wang, H. Active participation of variable speed wind turbine in inertial and primary frequency regulations. Electr. Power Syst. Res. 2017, 147, 174–184. [Google Scholar] [CrossRef]
- Rakhshani, E.; Remon, D.; Cantarellas, A.M.; Garcia, J.M.; Rodriguez, P. Modeling and sensitivity analyses of VSP based virtual inertia controller in HVDC links of interconnected power systems. Electr. Power Syst. Res. 2016, 141, 246–263. [Google Scholar] [CrossRef]
- Muhssin, M.T.; Cipcigan, L.M.; Obaid, Z.A.; L-Ansari, W.F.A. A novel adaptive deadbeat-based control for load frequency control of low inertia system in interconnected zones north and south of Scotland. Int. J. Electr. Power Energy Syst. 2017, 89, 52–61. [Google Scholar] [CrossRef]
- Karbouj, H.; Rather, Z.H.; Flynn, D.; Qazi, H.W. Non-synchronous fast frequency reserves in renewable energy integrated power systems: A critical review. Int. J. Electr. Power Energy Syst. 2019, 106, 488–501. [Google Scholar] [CrossRef]
- Zecchino, A.; Prostejovsky, A.M.; Ziras, C.; Marinelli, M. Large-scale provision of frequency control via V2G: The Bornholm power system case. Electr. Power Syst. Res. 2019, 170, 25–34. [Google Scholar] [CrossRef]
- Asvapoositkul, S.; Fradley, J.; Preece, R. Incorporation of active power ancillary services into VSC-HVDC connected energy sources. Electr. Power Syst. Res. 2020, 189, 106769. [Google Scholar] [CrossRef]
- Hong, Q. Fast frequency response for effective frequency control in power systems with low inertia. J. Eng. 2019, 2019, 1696–1702. [Google Scholar] [CrossRef]
- Eriksson, R.; Modig, N.; Elkington, K. Synthetic inertia versus fast frequency response: A definition. IET Renew. Power Gener. 2018, 12, 507–514. [Google Scholar] [CrossRef]
- Zhu, J.; Booth, C.D.; Adam, G.P.; Roscoe, A.J.; Bright, C.G. Inertia emulation control strategy for VSC-HVDC transmission system. IEEE Trans. Power Syst. 2013, 28, 1277–1287. [Google Scholar] [CrossRef] [Green Version]
- Chakravorty, D.; Chaudhuri, B.; Hui, S.Y.R. Rapid Frequency Response from Smart Loads in Great Britain Power System. IEEE Trans. Smart Grid 2017, 8, 2160–2169. [Google Scholar] [CrossRef] [Green Version]
- Ortega, Á.; Milano, F. Combined frequency and RoCoF control of converter-interfaced energy storage systems. IFAC-PapersOnLine 2019, 52, 240–245. [Google Scholar] [CrossRef]
- EirGrid, S. DS3 Programme Operational Capability Outlook 2016. 2015. Available online: https://www.eirgridgroup.com/site-files/library/EirGrid/DS3-Operational-Capability-Outlook-2016.pdf) (accessed on 10 January 2022).
- Pusceddu, E.; Zakeri, B.; Gissey, G.C. Synergies between energy arbitrage and fast frequency response for battery energy storage systems. Appl. Energy 2021, 283, 116274. [Google Scholar] [CrossRef]
- Bao, P.; Zhang, W.; Cheng, D.; Liu, M. Hierarchical control of aluminum smelter loads for primary frequency support considering control cost. Int. J. Electr. Power Energy Syst. 2020, 122, 106202. [Google Scholar] [CrossRef]
- Papadogiannis, K.A.; Hatziargyriou, N.D. Optimal Allocation of Primary Reserve Services in Energy Markets. IEEE Trans. Power Syst. 2004, 19, 652–659. [Google Scholar] [CrossRef]
- Hao, L.; Ji, J.; Xie, D.; Wang, H.; Li, W.; Asaah, P. Scenario-based unit commitment optimization for power system with large-scale wind power participating in primary frequency regulation. J. Mod. Power Syst. Clean Energy 2020, 8, 1259–1267. [Google Scholar] [CrossRef]
- Hong, Q. Design and validation of a wide area monitoring and control system for fast frequency response. IEEE Trans. Smart Grid 2020, 11, 3394–3404. [Google Scholar] [CrossRef] [Green Version]
- Ćalović, M.S. Advanced automatic generation control with automatic compensation of tie-line losses. Electr. Power Compon. Syst. 2012, 40, 807–828. [Google Scholar] [CrossRef]
- Ariff, M.A.M.; Pal, B.C. Coherency identification in interconnected power system—An independent component analysis approach. IEEE Trans. Power Syst. 2013, 28, 1747–1755. [Google Scholar] [CrossRef] [Green Version]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef] [Green Version]
- Canizares, C. Benchmark Systems for Small-Signal Stability Analysis and Control; Technical Report; IEEE Power and Energy Society: Manhattan, NY, USA, 1 August 2015. [Google Scholar]
- Singh, A.K.; Pal, B.C. IEEE PES Task Force on Benchmark Systems for Stability Controls Report on the 68-Bus, 16-Machine, 5-Area System; Technical Report; IEEE PES Task Force on Benchmark Systems for Stability Controls: Manhattan, NY, USA, 3 December 2013. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Demand [GW] | FFR [MW] | Inertia [s] |
|---|---|---|---|
| Area1 | 4 | 120 | 3 |
| Area2 | 4 | 120 | 5 |
| Area3 | 4 | 120 | 7 |
| FFR Stage | Activated at RoCoF [Hz/s] | Fully Available in [s] | Provision Price [€/MWs] |
|---|---|---|---|
| 1 | 0.1 | 1 | 1 |
| 2 | 0.2 | 0.75 | 2 |
| 3 | 0.3 | 0.5 | 3 |
| Case | 1–2 Line Length [p.u.] | 1–3 Line Length [p.u.] | 2–3 Line Length [p.u.] | Size of Disturbance [MW] | Location of Disturbance |
|---|---|---|---|---|---|
| 1.1 | 1 | 1 | 1 | 320 | Area2 |
| 1.2 | 5 | 5 | 5 | 320 | Area2 |
| 1.3 | 5 | 3 | 1 | 320 | Area2 |
| Case | Size of Disturbance [MW] | Location of Disturbance |
|---|---|---|
| 2.1 | 320 | Area1 |
| 2.2 | 320 | Area3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stojković, J.; Stefanov, P. A Novel Approach for the Implementation of Fast Frequency Control in Low-Inertia Power Systems Based on Local Measurements and Provision Costs. Electronics 2022, 11, 1776. https://doi.org/10.3390/electronics11111776
Stojković J, Stefanov P. A Novel Approach for the Implementation of Fast Frequency Control in Low-Inertia Power Systems Based on Local Measurements and Provision Costs. Electronics. 2022; 11(11):1776. https://doi.org/10.3390/electronics11111776
Chicago/Turabian StyleStojković, Jelena, and Predrag Stefanov. 2022. "A Novel Approach for the Implementation of Fast Frequency Control in Low-Inertia Power Systems Based on Local Measurements and Provision Costs" Electronics 11, no. 11: 1776. https://doi.org/10.3390/electronics11111776