
Machine Learning-Based Structural Health Monitoring Using RFID for Harsh Environmental Conditions


Abstract
:1. Introduction
2. Proposed Methodology
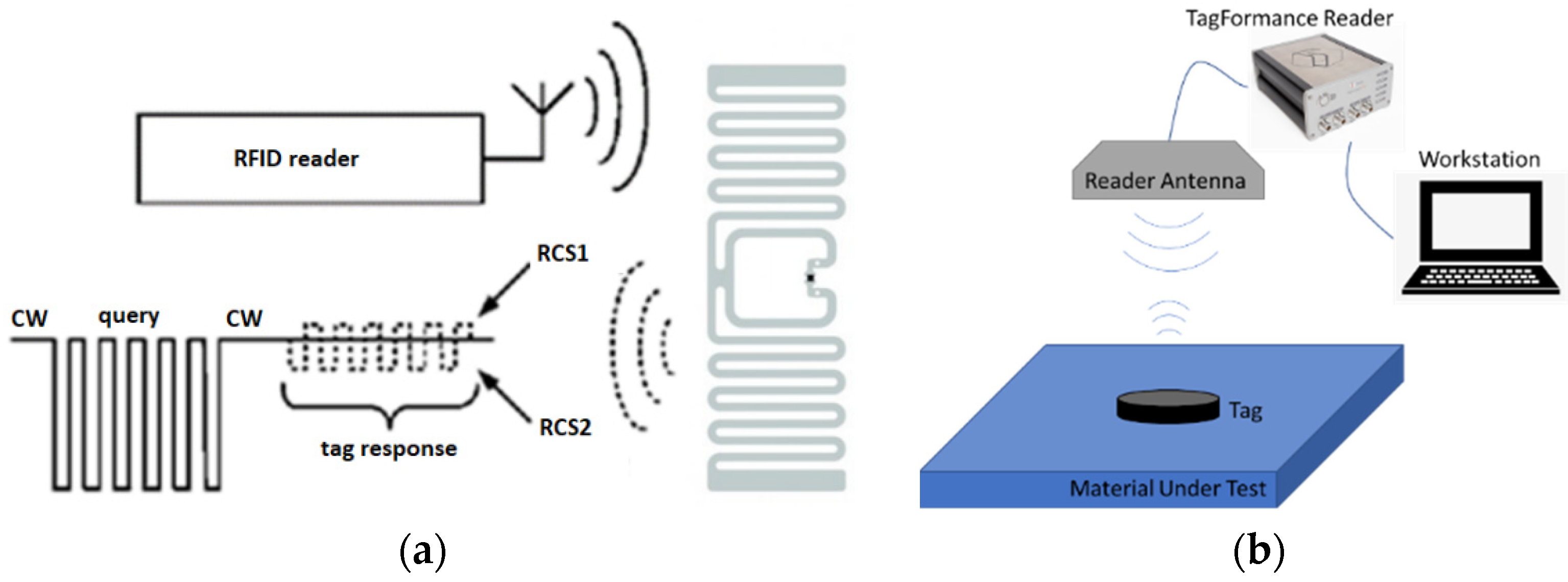
2.1. RFID Base Material Identification and Crack Sensing
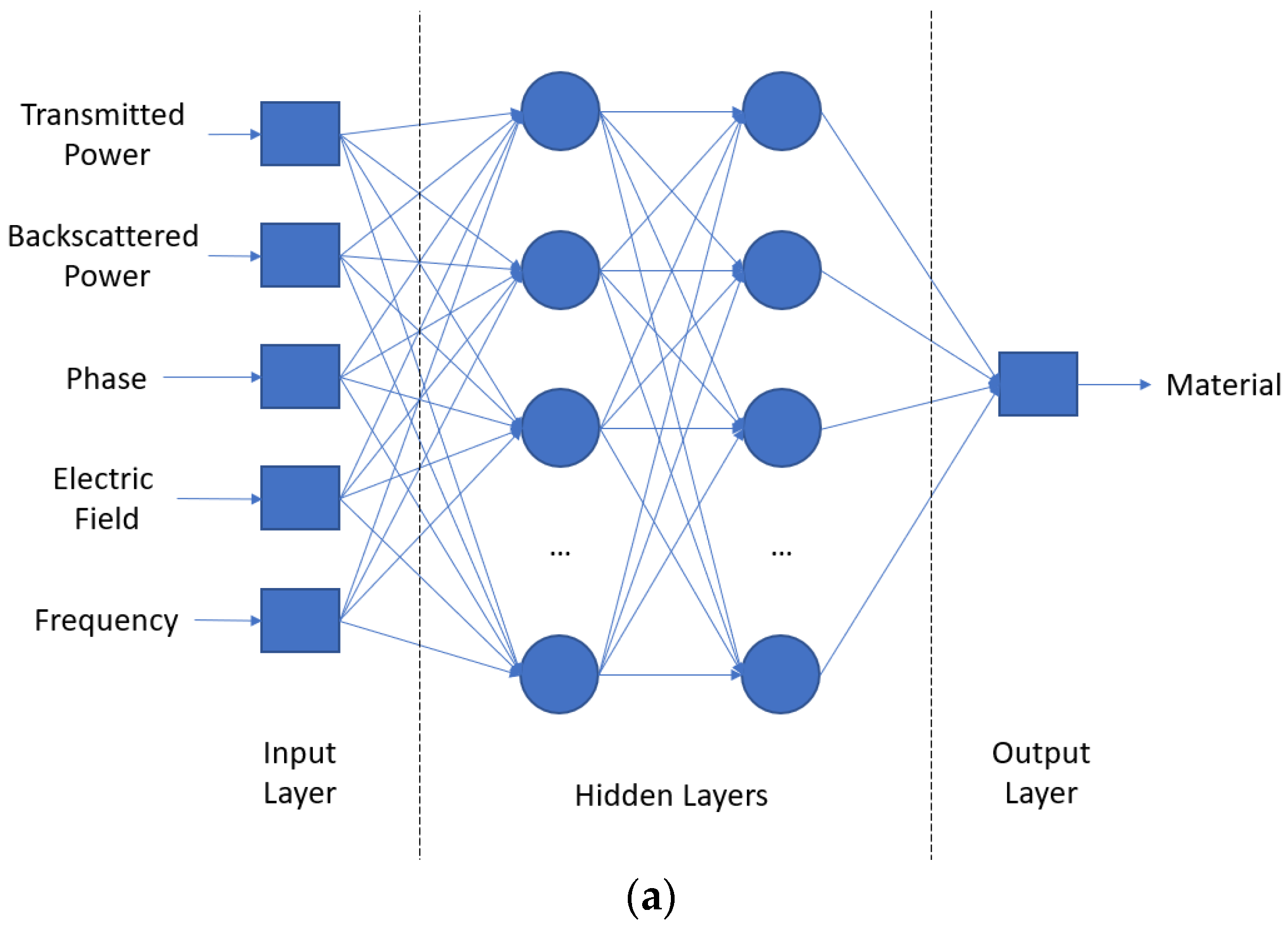
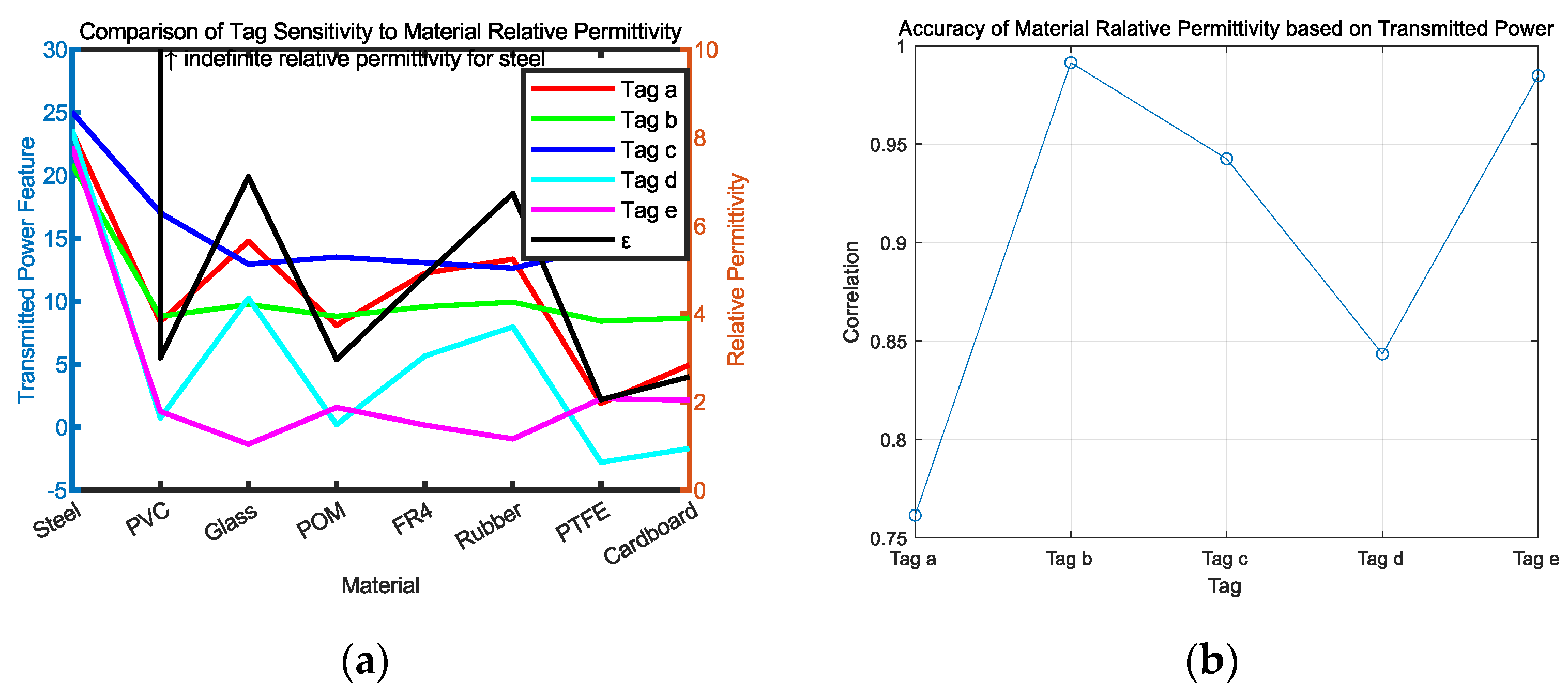
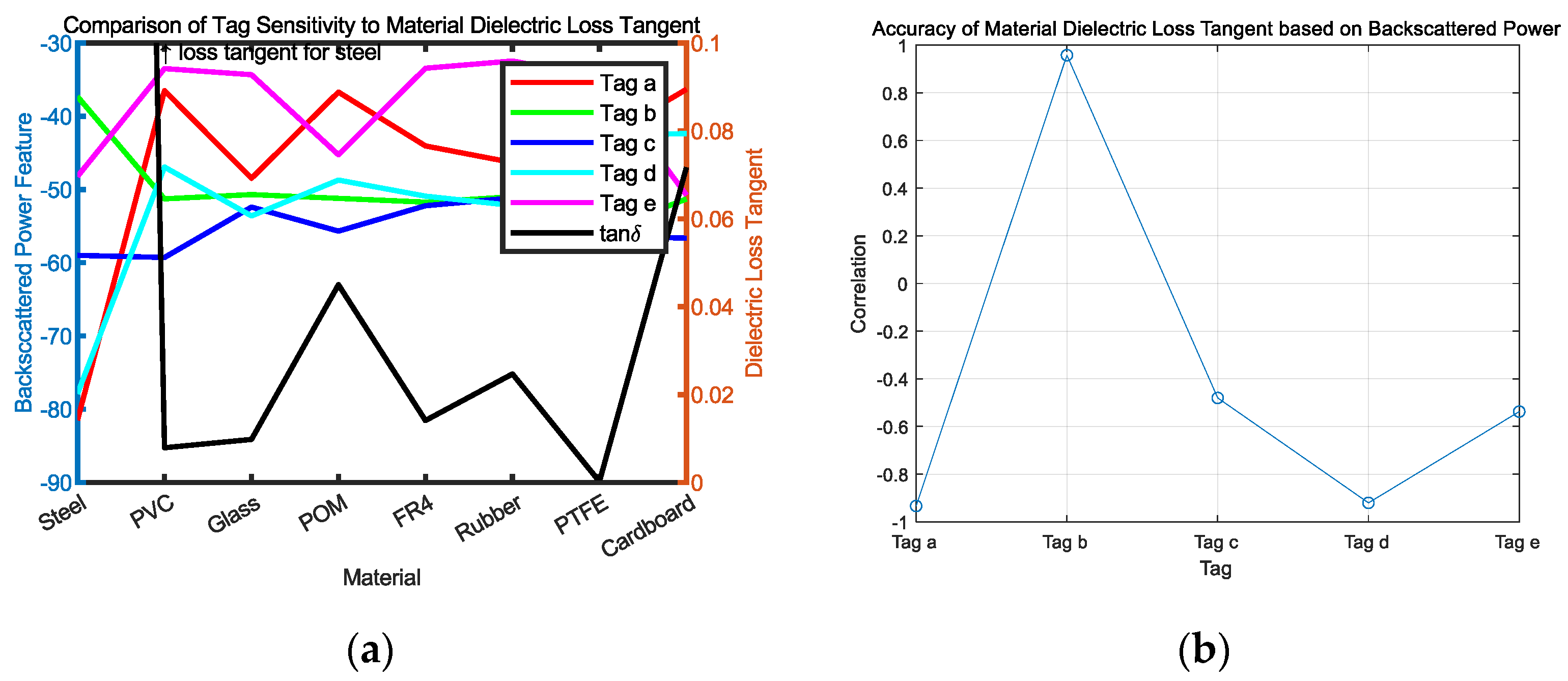
2.2. Machine Learning-Aided Material Identification
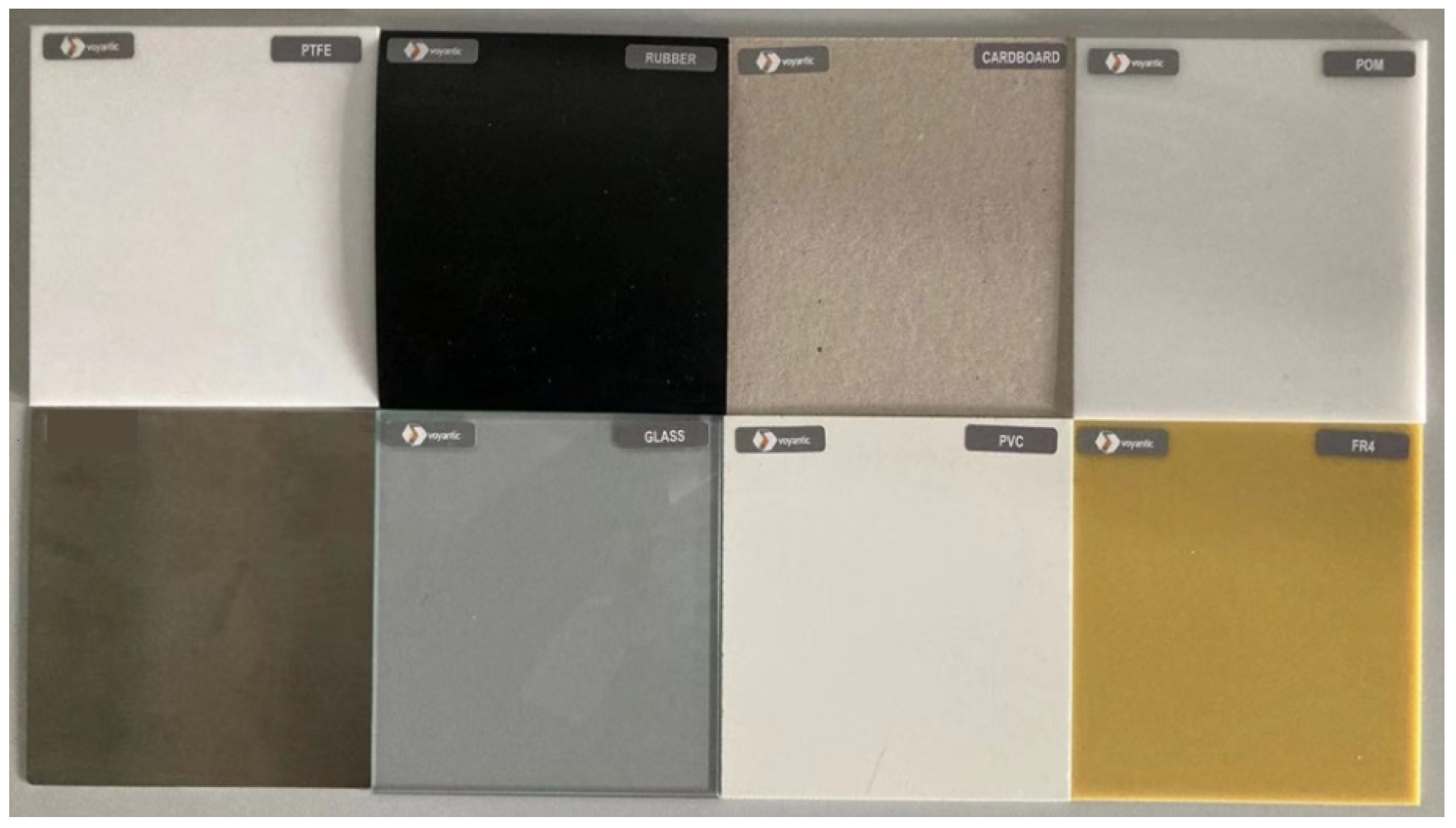
2.3. Material Sample Preparation
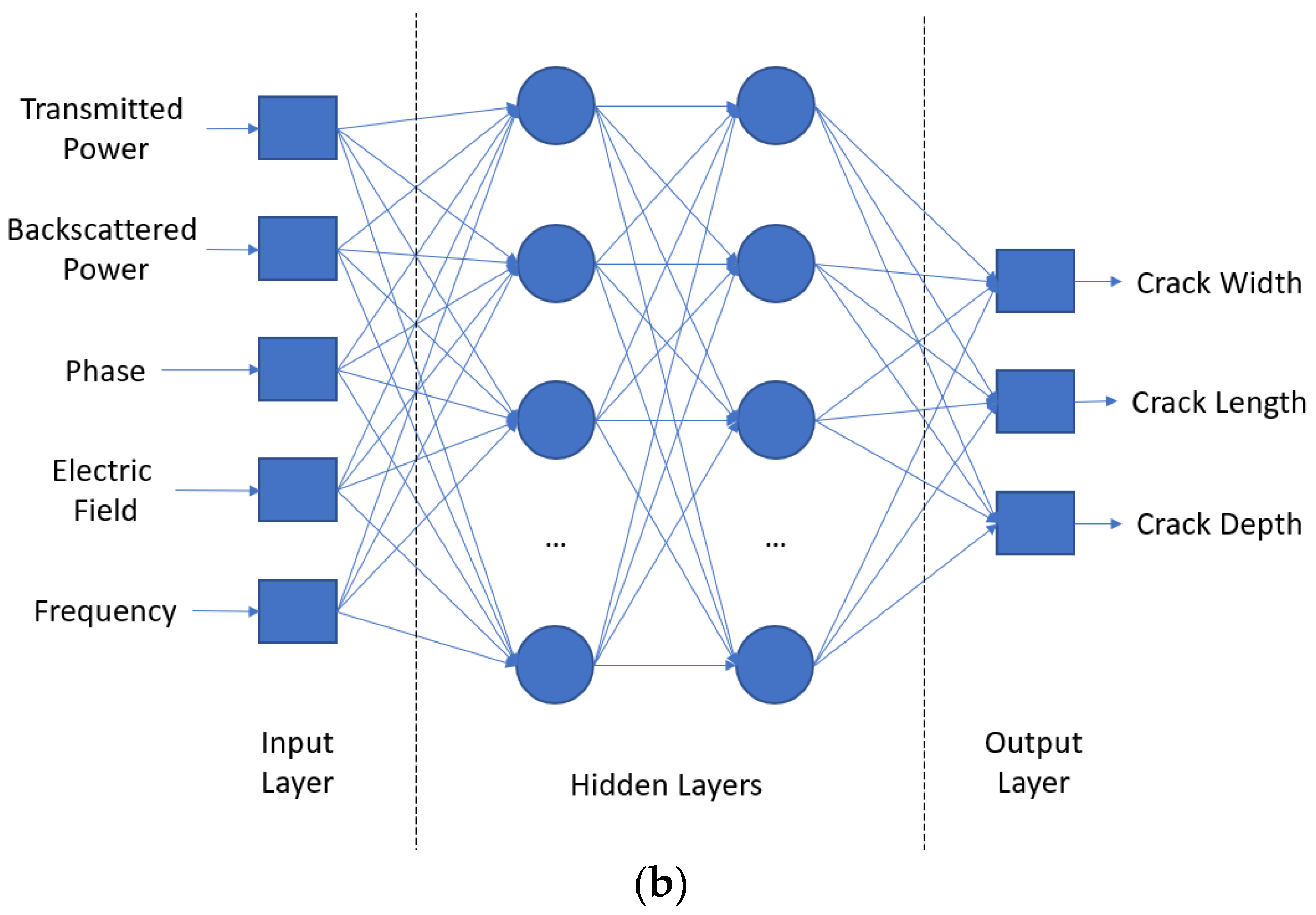
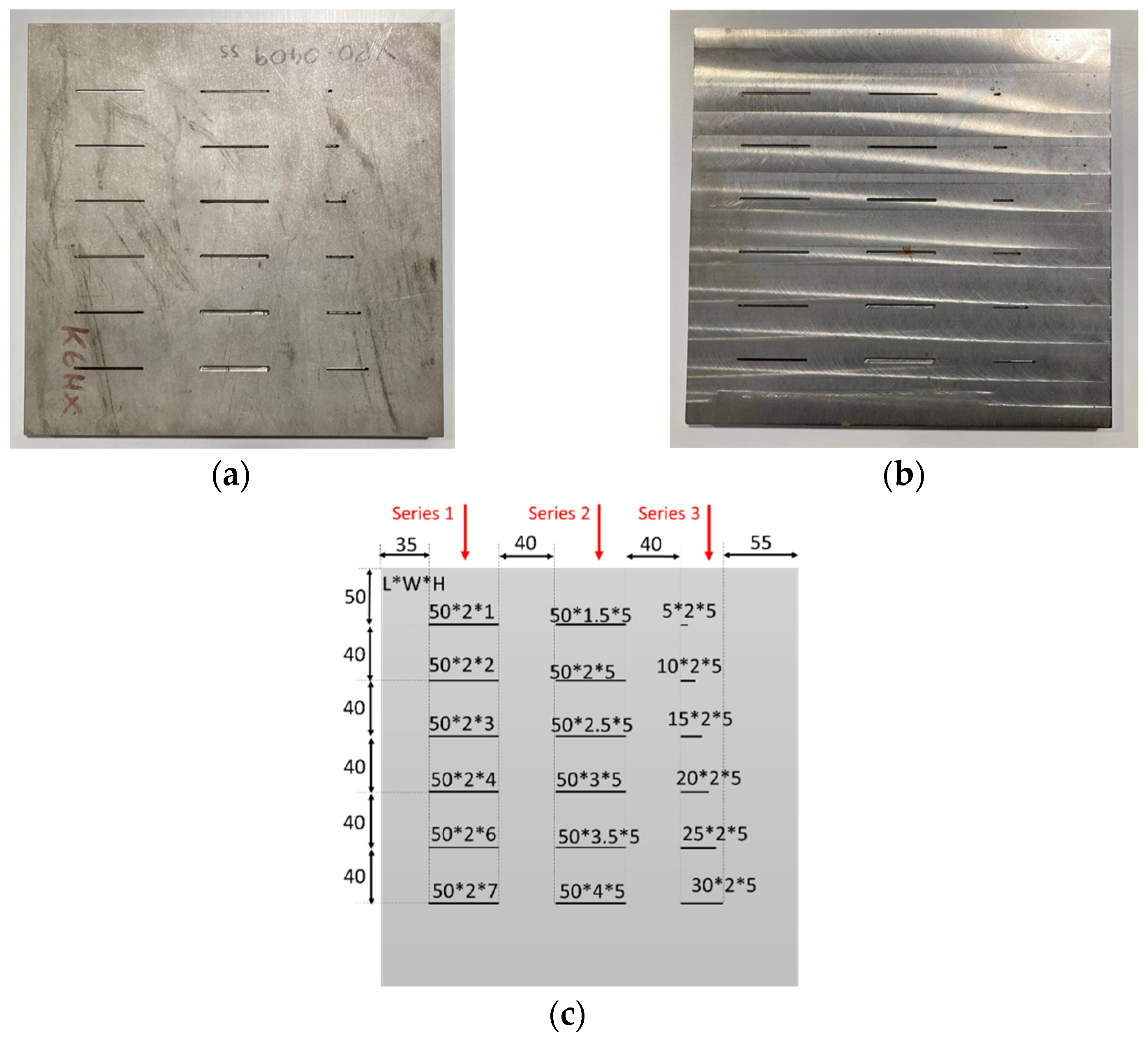
2.4. Crack Information
2.5. Data Preparation and Accuracy Equation
3. Experiment Validation
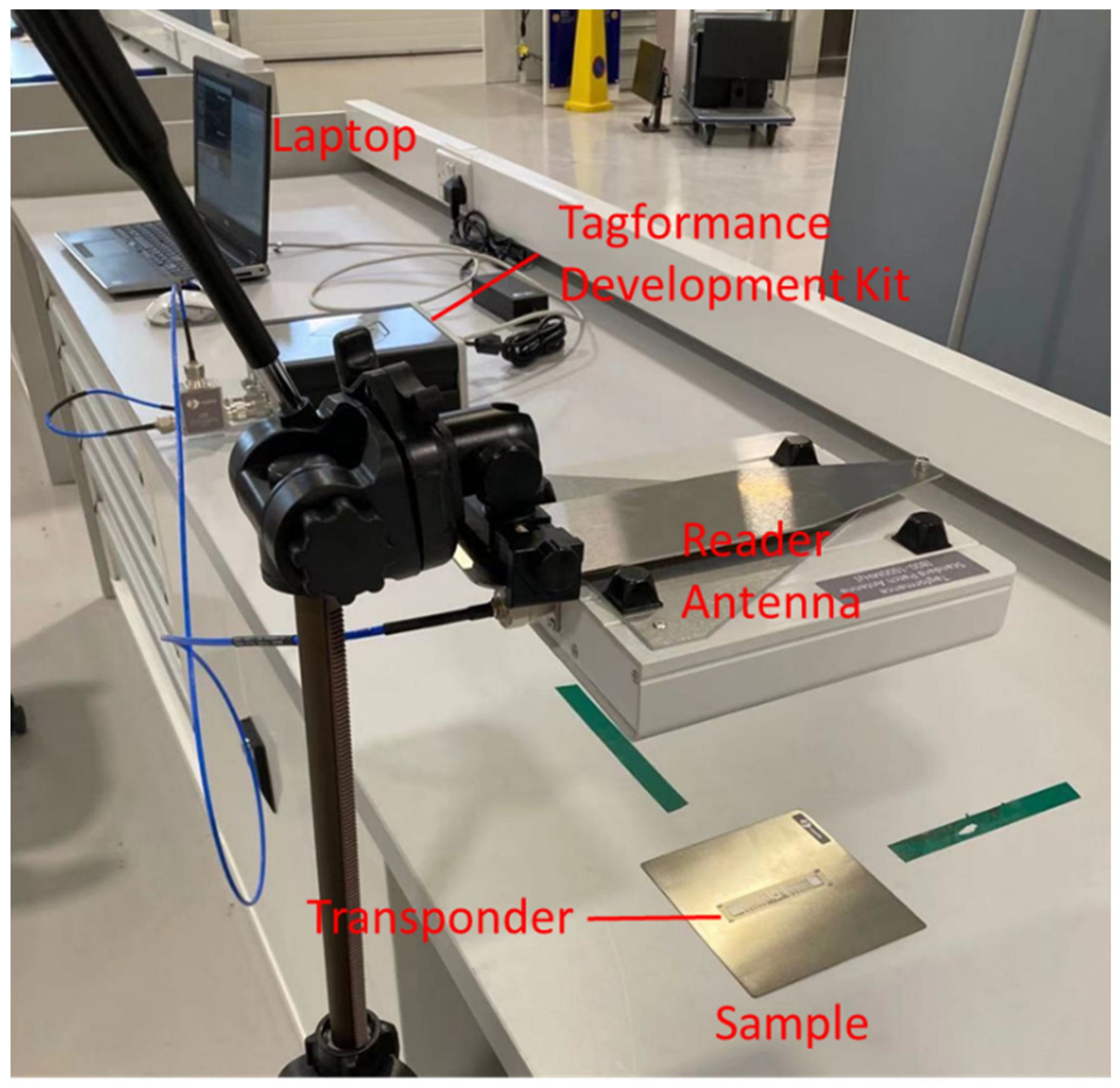
3.1. Experiment Setup
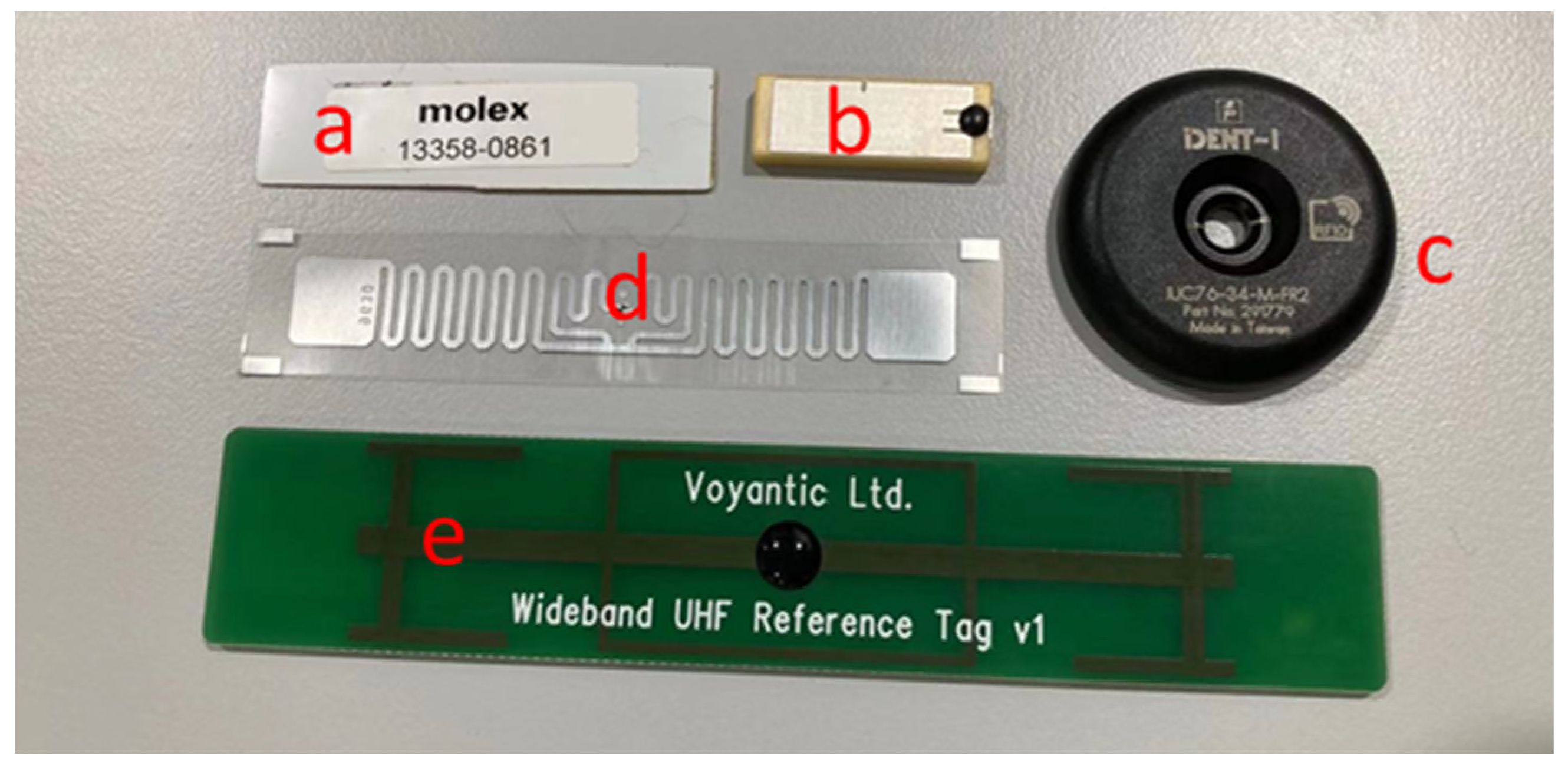
3.2. COTS RFID Tags for Validation
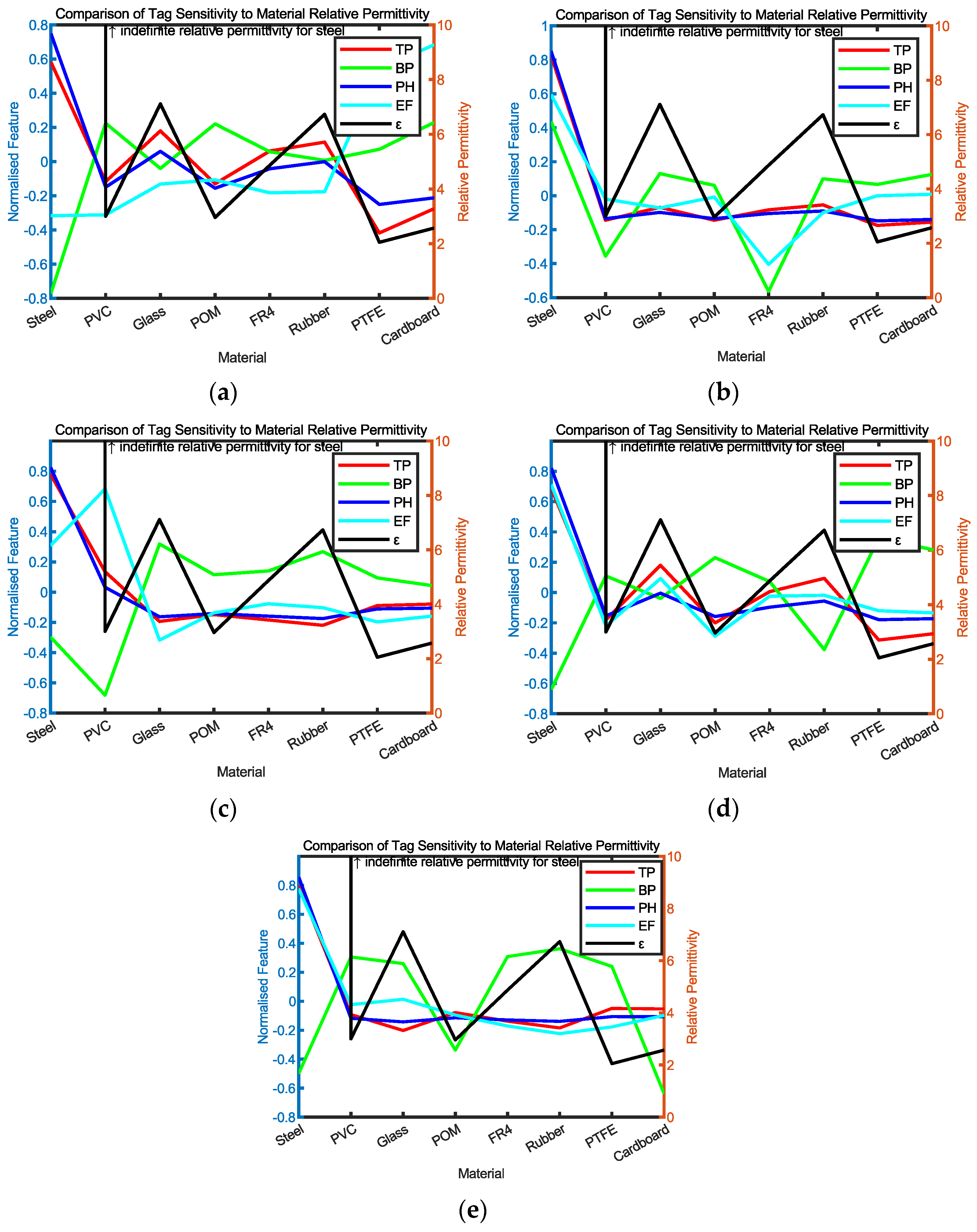
3.3. Validation Results
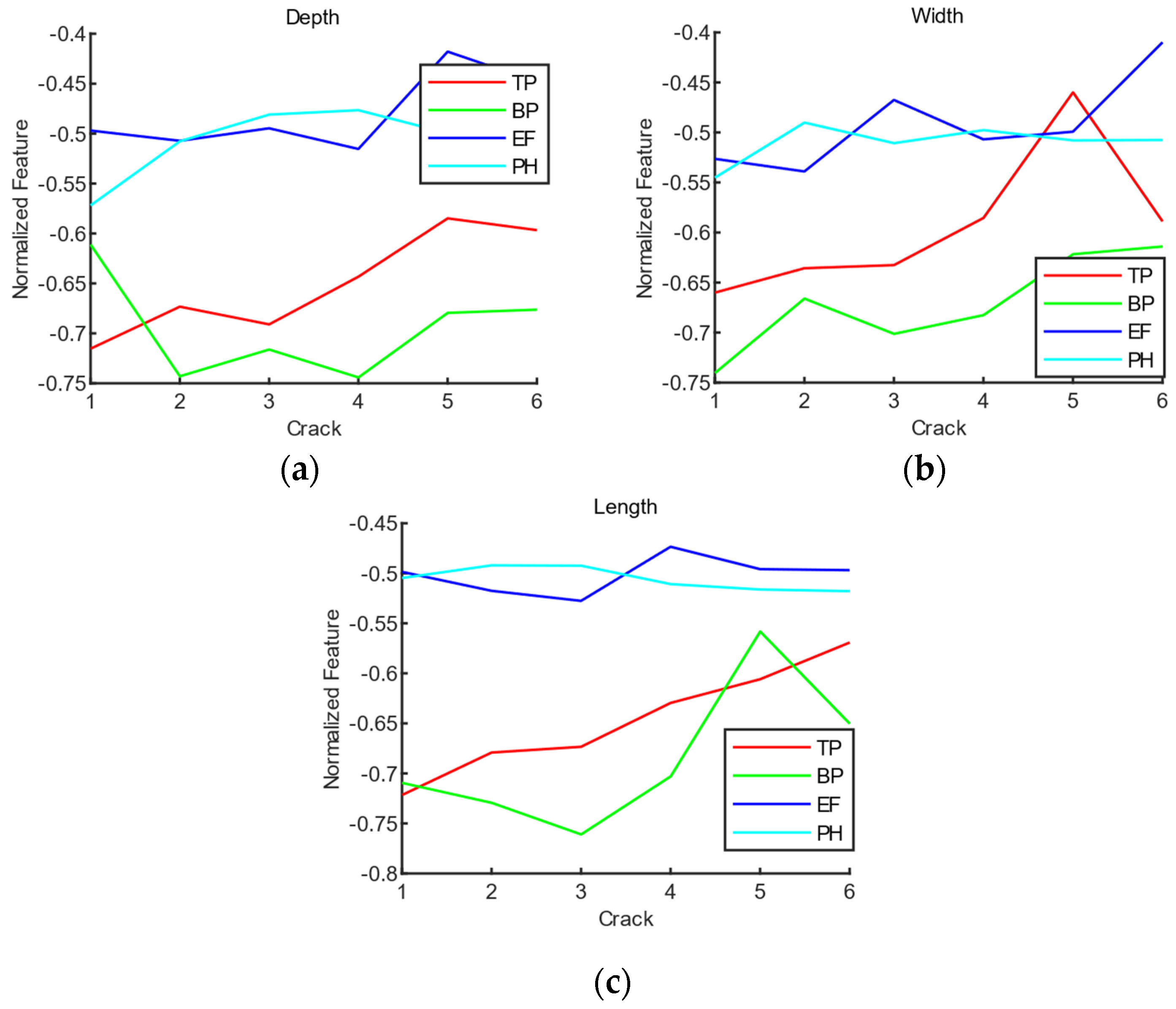
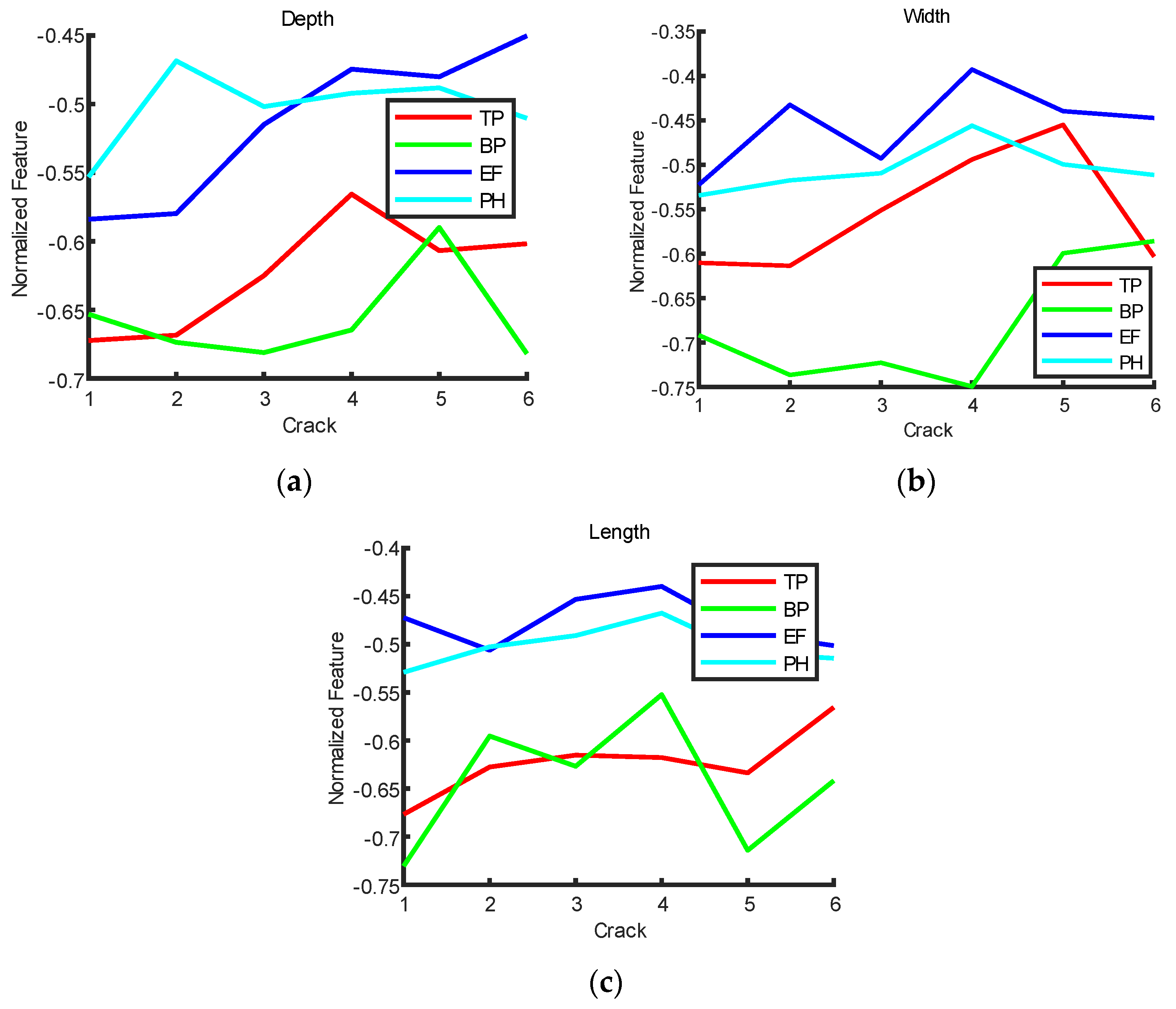
3.4. Validation of Crack Sensing Capability of RFID
3.5. Discussion
4. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviation
| Acronyms | Definition |
| ANN | Artificial neural network |
| ASK | Amplitude shift keying |
| BP | Backscattered power |
| COTS | Commercial off-the-shelf |
| EF | Electric field |
| EMAT | Electromagnetic acoustic transducer |
| FR-4 | Flame retardant-4 |
| FS | Fuzzy logic-based system |
| HF | High frequency |
| IAEA | International Atomic Energy Agency |
| IC | Integrated circuit |
| IoT | Internet of Things |
| LF | Low frequency |
| MFL | Magnetic flux leakage |
| MHz | Megahertz |
| ML | Machine learning |
| MLNN | Multi-layer neural network |
| MRC | Magnetic resonance coupling |
| NDT | Non-destructive testing |
| NDT&E | Non-destructive testing and evaluation |
| PE | Processing element |
| PH | Phase |
| POM | Polyoxymethylene |
| POCO | Post Operation Clean Out |
| PTFE | Polytetrafluoroethylene |
| PVC | Polyvinylchloride |
| ReLU | Rectified Linear Unit |
| RFID | Radio frequency identification |
| SHM | Structural Health Monitoring |
| SVM | Support vector machines |
| TP | Transmitted power |
| UHF | Ultra-high frequency |
References
- Langlois, L. IAEA Action Plan on nuclear safety. Energy Strat. Rev. 2013, 1, 302–306. [Google Scholar] [CrossRef]
- Duan, K.-K.; Cao, S.-Y. Emerging RFID technology in structural engineering—A review. Structures 2020, 28, 2404–2414. [Google Scholar] [CrossRef]
- Sunny, A.I.; Zhang, J.; Tian, G.Y.; Tang, C.; Rafique, W.; Zhao, A.; Fan, M. Temperature Independent Defect Monitoring Using Passive Wireless RFID Sensing System. IEEE Sens. J. 2018, 19, 1525–1532. [Google Scholar] [CrossRef] [Green Version]
- Tang, C.; Rashvand, H.F.; Hu, P.; Tian, G.Y. Structural health monitoring with WSNs. In Wireless Sensor Systems for Extreme Environments: Space, Underwater, Underground, and Industrial; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 383–408. [Google Scholar]
- Sunny, A.I.; Zhao, A.; Li, L.; Kanteh Sakiliba, S. Low-Cost IoT-Based Sensor System: A Case Study on Harsh Environmental Monitoring. Sensors 2021, 21, 214. [Google Scholar] [CrossRef] [PubMed]
- Nakano, H.; Nagai, S. Crack Measurements by Laser Ultrasonic at High Temperatures. JPN J. Appl. Phys. 1993, 32, 2540–2542. [Google Scholar] [CrossRef]
- Kazys, R.; Vaskeliene, V. High Temperature Ultrasonic Transducers: A Review. Sensors 2021, 21, 3200. [Google Scholar] [CrossRef]
- Qu, Z.; Jiang, P.; Zhang, W. Development and Application of Infrared Thermography Non-destructive Testing Techniques. Sensors 2020, 20, 3851. [Google Scholar] [CrossRef]
- Yuan, W.; Liu, Z.; Li, Y.; Huo, J.; Wang, Y. Study on the Laser-EMAT Integrated System for Simultaneously Measuring the Width and Depth of Metal Plate. IEEE Sens. J. 2020, 21, 6270–6279. [Google Scholar] [CrossRef]
- Idris, A.; Edwards, C.; Palmer, S.B. Acoustic wave measurements at elevated temperature using a pulsed laser generator and an electromagnetic acoustic transducer detector. Nondestruct. Test. Eval. 1994, 11, 195–213. [Google Scholar] [CrossRef]
- Tkocz, J.; Greenshields, D.; Dixon, S. High power phased EMAT arrays for nondestructive testing of as-cast steel. NDT E Int. 2019, 102, 47–55. [Google Scholar] [CrossRef]
- Wu, J.; Yang, Y.; Li, E.; Deng, Z.; Kang, Y.; Tang, C.; Sunny, A.I. A High-Sensitivity MFL Method for Tiny Cracks in Bearing Rings. IEEE Trans. Magn. 2018, 54, 6201308. [Google Scholar] [CrossRef]
- Ge, J.; Hu, B.; Yang, C. Bobbin pulsed eddy current array probe for detection and classification of defects in nonferromagnetic tubes. Sens. Actuators A Phys. 2021, 317, 112450. [Google Scholar] [CrossRef]
- Fan, M.; Cao, B.; Sunny, A.I.; Li, W.; Tian, G.; Ye, B. Pulsed eddy current thickness measurement using phase features immune to liftoff effect. NDT E Int. 2017, 86, 123–131. [Google Scholar] [CrossRef]
- Wang, P.; Dong, L.; Wang, H.; Li, G.; Di, Y.; Xie, X.; Huang, D. Passive Wireless Dual-Tag UHF RFID Sensor System for Surface Crack Monitoring. Sensors 2021, 21, 882. [Google Scholar] [CrossRef]
- Sunny, G.A. Passive Low Frequency RFID for Non-Destructive Evaluation and Monitoring. Ph.D. Thesis, Newcastle University, Newcastle upon Tyne, UK, 2017. [Google Scholar]
- Imam, A.; Tian, G.Y. Enhanced sensitivity of low frequency (LF) RFID sensor signal for structural health monitoring (SHM) in high temperature environment. In Proceedings of the 19 World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016. [Google Scholar]
- Zhang, J.; Tian, G.Y.; Marindra, A.M.J.; Sunny, A.I.; Zhao, A.B. A Review of Passive RFID Tag Antenna-Based Sensors and Systems for Structural Health Monitoring Applications. Sensors 2017, 17, 265. [Google Scholar] [CrossRef] [PubMed]
- Khan, Z.; Chen, X.; He, H.; Mehmood, A.; Virkki, J. A Bending Passive RFID Tag as a Sensor for High-Temperature Exposure. Int. J. Antennas Propag. 2021, 2021, 5541197. [Google Scholar] [CrossRef]
- Sunny, A.I.; Tian, G.Y.; Zhang, J.; Pal, M. Low frequency (LF) RFID sensors and selective transient feature extraction for corrosion characterisation. Sens. Actuators A Phys. 2016, 241, 34–43. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Yang, R.; He, Y.; Tian, G.Y.; Xu, L.; Wu, R. Identification and characterisation of steel corrosion using passive high frequency RFID sensors. Measurement 2016, 92, 421–427. [Google Scholar] [CrossRef]
- Zhang, J.; Tian, G.Y. UHF RFID Tag Antenna-Based Sensing for Corrosion Detection & Characterization Using Principal Component Analysis. IEEE Trans. Antennas Propag. 2016, 64, 4405–4414. [Google Scholar] [CrossRef]
- Zhao, A.; Tian, G.Y.; Zhang, J. IQ signal based RFID sensors for defect detection and characterisation. Sens. Actuators A Phys. 2018, 269, 14–21. [Google Scholar] [CrossRef] [Green Version]
- Vemagiri, J.; Chamarti, A.; Agarwal, M.; Varahramyan, K. Transmission line delay-based radio frequency identification (RFID) tag. Microw. Opt. Technol. Lett. 2007, 49, 1900–1904. [Google Scholar] [CrossRef]
- Caizzone, S.; DiGiampaolo, E. Wireless Passive RFID Crack Width Sensor for Structural Health Monitoring. IEEE Sens. J. 2015, 15, 6767–6774. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Chen, Z.; Cao, J.; Huang, C.; Tian, G. A cylindrical ring dielectric resonator based passive wireless sensor for position insensitive crack monitoring. Sens. Actuators A Phys. 2020, 316, 112420. [Google Scholar] [CrossRef]
- Zohra, F.-T.; Dey, S.; Salim, O.; Masoumi, H.; Karmakar, N. Design and Analysis of a UHF RFID Crack Sensor for Health Monitoring of Mining Conveyor Belt. In Proceedings of the 2020 27th International Conference on Telecommunications (ICT), Bali, Indonesia, 5–7 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Team, D. Advantages and Disadvantages of Machine Learning Language. Available online: https://dataflair.training/blogs/advantages-anddisadvantages-of-machine-learning/ (accessed on 30 December 2021).
- Zohra, F.T.; Salim, O.; Dey, S.; Masoumi, H.; Karmakar, N. A Novel Machine Learning Based Conveyor Belt Health Monitoring Incorporating UHF RFID Backscattered Power. In Proceedings of the 2021 IEEE 5th International Conference on Information Technology, Information Systems and Electrical Engineering (ICITISEE), Purwokerto, Indonesia, 24–25 November 2021; pp. 230–234. [Google Scholar] [CrossRef]
- Hasni, H.; Alavi, A.H.; Jiao, P.; Lajnef, N. Detection of fatigue cracking in steel bridge girders: A support vector machine approach. Arch. Civ. Mech. Eng. 2017, 17, 609–622. [Google Scholar] [CrossRef]
- Hsieh, Y.-A.; Tsai, Y.J. Machine Learning for Crack Detection: Review and Model Performance Comparison. J. Comput. Civ. Eng. 2020, 34, 04020038. [Google Scholar] [CrossRef]
- Pour-Ghaz, M.; Barrett, T.; Ley, T.; Materer, N.; Apblett, A.W.; Weiss, J. Wireless Crack Detection in Concrete Elements Using Conductive Surface Sensors and Radio Frequency Identification Technology. J. Mater. Civ. Eng. 2014, 26, 923–929. [Google Scholar] [CrossRef]
- Martínez-Castro, R.E.; Jang, S.; Kim, J.; Wentworth, A. Experimental Evaluation of a Low-Cost RFID-Based Sensor to Crack Propagation. J. Aerosp. Eng. 2019, 32, 04019003. [Google Scholar] [CrossRef]
- Omer, M.; Tian, G.Y.; Gao, B.; Su, D. Passive UHF RFID Tag as a Sensor for Crack Depths. IEEE Sens. J. 2018, 18, 9867–9873. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Sunny, A.I.; Zhang, G.; Tian, G. Feature Extraction for Robust Crack Monitoring Using Passive Wireless RFID Antenna Sensors. IEEE Sens. J. 2018, 18, 6273–6280. [Google Scholar] [CrossRef] [Green Version]
- Hadidi, R.; Cao, J.; Woodward, M.; Ryoo, M.S.; Kim, H. Real-time image recognition using collaborative IOT devices. In Proceedings of the 1st on Reproducible Quality-Efficient Systems Tournament on Co-Designing Pareto-Efficient Deep Learning, Williamsburg, VA, USA, 24 April 2018; p. 1. [Google Scholar]
- Fernando, H.; Marshall, J. What lies beneath: Material classification for autonomous excavators using proprioceptive force sensing and machine learning. Autom. Constr. 2020, 119, 103374. [Google Scholar] [CrossRef]
- Jameel, S.M.; Hashmani, M.A.; Rehman, M.; Budiman, A. An Adaptive Deep Learning Framework for Dynamic Image Classification in the Internet of Things Environment. Sensors 2020, 20, 5811. [Google Scholar] [CrossRef] [PubMed]
- Bhaddurgatte, R.C.; Kumar, B.V.; Kusuma, S.M. Machine learning and prediction-based resource management in IoT considering Qos. Int. J. Recent Technol. Eng. 2019, 8, 687–694. [Google Scholar]
- Zhang, L.; Yang, F.; Zhang, Y.D.; Zhu, Y.J. Road crack detection using deep convolutional neural network. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016. [Google Scholar]
- Choudhary, G.K.; Dey, S. Crack detection in concrete surfaces using image processing, fuzzy logic, and neural networks. In Proceedings of the 2012 IEEE fifth International Conference on Advanced Computational Intelligence (ICACI), Nanjing, China, 18–20 October 2012. [Google Scholar]
- Ahson, S.A.; Ilyas, M. RFID Handbook: Applications, Technology, Security, and Privacy; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Zhao, A.; Zhang, J.; Tian, G.Y. Miniaturization of UHF RFID Tag Antenna Sensors for Corrosion Characterization. IEEE Sens. J. 2017, 17, 7908–7916. [Google Scholar] [CrossRef]
- Zhao, T. Effective Medium Modeling and Experimental Characterization of Multilayer Dielectric with Periodic Inclusion. Master’s Thesis, Iowa State University, Ames, IA, USA, 2015. [Google Scholar]
- Datta, S.; Chan, C.T.; Ho, K.M.; Soukoulis, C.M. Effective dielectric constant of periodic composite structures. Phys. Rev. B 1993, 48, 14936–14943. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chakaravarthi, G.; Logakannan, K.P.; Philip, J.; Rengaswamy, J.; Ramachandran, V.; Arunachalam, K. Reusable Passive Wireless RFID Sensor for Strain Measurement on Metals. IEEE Sens. J. 2018, 18, 5143–5150. [Google Scholar] [CrossRef]
- Caccami, M.C.; Manzari, S.; Marrocco, G. Phase-Oriented Sensing by Means of Loaded UHF RFID Tags. IEEE Trans. Antennas Propag. 2015, 63, 4512–4520. [Google Scholar] [CrossRef]
- Saadat-Safa, M.; Nayyeri, V.; Khanjarian, M.; Soleimani, M.; Ramahi, O.M. A CSRR-Based Sensor for Full Characterization of Magneto-Dielectric Materials. IEEE Trans. Microw. Theory Tech. 2019, 67, 806–814. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Relative Permittivity | Dielectric Loss Tangent |
|---|---|---|
| Cardboard | 2.57 | 0.0717 |
| FR-4 | 4.87 | 0.0141 |
| Glass | 7.11 | 0.0098 |
| Polyoxymethylene (POM) | 2.96 | 0.0450 |
| Polytetrafluoroethylene (PTFE) | 2.05 | 0.0002 |
| Polyvinylchloride (PVC) | 3.00 | 0.0079 |
| Rubber | 6.73 | 0.0247 |
| Transponder | Size (mm) | Read Range (m) | Operation Band (MHz) |
|---|---|---|---|
| a | 49.8 × 14 × 0.4 | 3–3.6 | 865–928 |
| b | 25 × 9 × 3.7 | 1.8 | 902–928 |
| c | Round 34 × 34 × 6 | NA | 902–928 |
| d | 80 × 16 × 0.1 | NA | NA |
| e | 116 × 22 × 0.9 | NA | 800–1000 |
| Method | Tree | Naïve Bayes | 2-Layer MLNN | 3-Layer MLNN |
|---|---|---|---|---|
| Accuracy | 64.4% | 23.4% | 77.9% | 78.9% |
| Time | 1.1821 s | 19.765 s | 102.32 s | 149.19 s |
| Crack Parameter | Tree | Naïve Bayes | 2-Layer MLNN | 3-Layer MLNN |
|---|---|---|---|---|
| Length | 82.1%, 1.4737 s | 66.4%, 14.027 s | 90.8%, 73.589 s | 91.3%, 111.05 s |
| Width | 88.2%, 1.2931 s | 65.2%, 8.3985 s | 94.2%, 70.958 s | 94.2%, 105.94 s |
| Depth | 79.8%, 1.5238 s | 48.0%, 14.052 s | 90.9%, 73.596 s | 91.4%, 107.57 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, A.; Sunny, A.I.; Li, L.; Wang, T. Machine Learning-Based Structural Health Monitoring Using RFID for Harsh Environmental Conditions. Electronics 2022, 11, 1740. https://doi.org/10.3390/electronics11111740
Zhao A, Sunny AI, Li L, Wang T. Machine Learning-Based Structural Health Monitoring Using RFID for Harsh Environmental Conditions. Electronics. 2022; 11(11):1740. https://doi.org/10.3390/electronics11111740
Chicago/Turabian StyleZhao, Aobo, Ali Imam Sunny, Li Li, and Tengjiao Wang. 2022. "Machine Learning-Based Structural Health Monitoring Using RFID for Harsh Environmental Conditions" Electronics 11, no. 11: 1740. https://doi.org/10.3390/electronics11111740