1. Introduction
Nowadays, smart homes, smart devices, and several other smart systems are becoming ever more popular. The general view of these systems is focused on a single concept, known as IoT [
1]. An IoT system can be ‘whatever’ that contains the technical components, which allow the thing to link to the Internet through a wireless or wired network. The users of the IoT can be a person, a machine, or a combination of both [
2]. The vision of the IoT seeks to incorporate the sensing and actuation characteristics in everyday objects seamlessly by leveraging their network capacities to create pervasive information systems [
3,
4,
5]. Wireless Sensor Network (WSN) is often a technology used within an IoT system that supports multi-user access through a multi-application platform, and smart city is an example of such type of system.
Smart City is a modern way of thinking about urban space, incorporating Renewable Energy Sources and Systems (RESSs), energy conservation, sustainable mobility, environmental security, and economic growth, which reflect the priorities for future developments [
6,
7]. Users in a smart city may be interested to use (1) smart grid information, (2) availability of parking space [
8], (3) details regarding smart tourism [
9], (4) Accessing medical information [
9], (5) Major road accidents in the city etc.
The IoT helps smart cities to connect and manage multiple infrastructure and public services. From smart lighting and road traffic to networked public transport and waste disposal, the range of applications is very diverse. What they have in common are the results. Applying IoT solutions leads to lower energy costs, optimized use of natural resources, safer cities and a healthier environment. Example of these applications includes: Smart traffic solutions in the smart city use different types of sensors and retrieve GPS data from drivers’ smartphones to determine the number, location and speed of vehicles. At the same time, smart traffic lights connected to a cloud management platform can monitor green light times and automatically switch lights according to the current traffic situation to avoid traffic jams. Additionally, by using historical data, smart traffic management solutions can predict where traffic might go and take action to avoid potential traffic jams. With the help of GPS data from driver smart phones (or road surface sensors embedded in floor areas of parking lots), intelligent parking solutions determine whether parking spaces are occupied or available, and create a map parking space in real-time. When the next parking space becomes available, drivers will receive a notification and use the map on their phone to find a parking space faster and easier instead of driving blindly. IoT smart city solutions can also provide public service management services to citizens. With these services, citizens can use their smart meters to remotely monitor and control their usage. For example, a head of household can turn off his central heating using a cell phone. Additionally, if a problem arises (such as a water leak), utilities can notify households and send specialists to fix the problem. Smart cities based on IoT make the maintenance and control of street lights easier and cheaper. By equipping the street lamps with sensors and connecting them to a cloud management solution, the lighting program can be adapted to the lighting area. IoT-enabled smart city solutions help optimize waste collection plans by tracking waste quantities and providing route optimization and operational analysis. To improve public safety, IoT-based smart city technologies offer real-time monitoring, analysis and decision-making aids. By combining and analyzing data from acoustic sensors and CCTV cameras deployed across the city with data from social media, public safety solutions can predict potential crime scenes. In this way, the police can successfully arrest or track down potential perpetrators.
An example of a Smart City application is Barcelona, one of the main cities in Spain, which is using sensors to help monitor and manage traffic, also deployed a smart parking system. Further, the city uses smart LED street lamps. Moreover, the city is using sensor technology to enhance irrigation efficiency, which is critical when drought occurs. These sensors monitor rain and humidity to determine the quantity of water needed to irrigate parks [
10].
In order to provide large-scale access to information, smart cities are required to incorporate a multitude of wireless networks and architectures. Pervasive sensing (PS) is an especially promising model in this regard. The principle of pervasive computing is to equip some kind of computing facility with commonly used everyday items. PS enables low-power, tiny, and smart objects to evaluate the sensed data and send the processed data to the designated sink, wherever that may be [
11]. Under the IoT framework, PS will be extended to incorporate schemes for generating and sharing heterogeneous data in smart cities, which includes WSNs, personal and environmental monitoring devices, and database centers that are deployed in both urban and rural areas.
So, IoT-enabled WSNs can be used to enhance the standard of smart city living and the residential experience [
5]. In such environments, sensors are widespread and accessible to people, and they are integrated with public or private vehicles, and (or) installed on buildings and roads. To ensure better and cost-effective data distribution in such a wide-range PS model, an effective data sharing or delivery mechanism must be used in the sensing phase. There are many research work introduced in this field to address data delivery using Mobile Data Collector (D-collectors) [
12,
13,
14,
15,
16]. It is proven that networks with Mobile D-collectors use less energy than networks with static D-collectors [
17] and thereby it enhances the network lifetime. In this work, to provide efficient data collection in the network, we are employing multiple Mobile Data Collectors (D-collectors). We have to consider latency, energy use, and the available storage capacity of the D-collectors in the system in order to provide an effective path-planning of D-collectors. The optimal path planning of these mobile D-collectors is considered to be very challenging in an IoT environment and which is addressed in many works, e.g., [
18,
19]. In [
19] authors addressed the Mobile D-collectors’ Cognitive Path Planning in a precision agriculture wireless sensor network. Whereas in [
18], authors addressed the same using a hybrid collaborative method by combining a Genetic algorithm and an improved local search approach in an IoT environment.
Figure 1 reflects our smart city scenario, which consists of multiple users on the same platform with multiple applications. The smart city model depicted in
Figure 1, contains a two-tier telecommunication framework. In the bottom tier, it comprises of sensor devices or nodes (SN) that sense its surroundings and transmit the sensed data towards Access Points (APs) in the network. To save energy, these sensor nodes often have fixed and restricted transmission ranges, and do not relay traffic. APs in the top layer gather and deliver the data from SN to the D-collector present in their communication range. Finally, each D-collector delivers the collected data to the Base Station (BS) or sink. APs and D-collectors present in the top tier possess better transmission range and they communicate with the BS periodically to deliver the collected data from the bottom tier. An example scenario of data gathering using D-collectors in a smart city is illustrated in
Figure 2. According to this figure, there are 10 APs and a minimum number of D-collectors (three D-collectors here) to serve these APs.
In this work, our focus is on the path planning of mobile D-collectors utilizing a nature-inspired meta-heuristic algorithm named Bat algorithm that minimizes the required number of D-collectors and their respective travel distances in a smart city scenario. We propose and utilize Bat algorithm-based D-collector path planning (BDPP) to provide a solution to this multi-objective problem. Our contributions are summarized below:
For Mobile D-collectors in smart cities, we propose a massive data collection framework. We accomplish this by employing moving sensors that efficiently collect data in a smart environment in terms of both the number of D-collectors engaged and the total distance covered by each D-collector.
We propose a Bat algorithm-based pathfinding solution for D-collectors (BDPP) that operate in competitive time complexities and satisfy the traffic and memory power constraints.
We also introduce a cost-based fitness function in the pervasive sensing model for the election of D-collectors, and we consider the resource limitations of D-collectors in different aspects that include count, energy consumption, throughput and storage capabilities.
We compared our BDPP approach against other heuristic-based schemes (e.g., HS, EF, and, HCPF).
The rest of this paper is arranged as follows:
Section 2 reviews the related research works.
Section 3 sets out the system models and the description of the problem.
Section 4 explains our approach in detail.
Section 5 describes an example scenario.
Section 6 gives the details about the simulation, and finally
Section 7 concludes our work.
2. Related Work
One of the fundamental or atomic components of IoT is WSNs [
4,
5,
20,
21,
22,
23,
24,
25] and IoT data acquisition requires a WSN. In an integrated urban development, WSNs play an important role and are vital for smart cities. WSNs can be used in smart cities in a variety of applications and these applications include parking optimization, road traffic management, environmental monitoring, city security services [
26], home and office automation solutions (HOS) [
27], and energy monitoring in smart grids [
28] etc.
A WSN is typically made up of tiny and low-powered sensor devices that can perceive, process, and interact with each other through wireless communication. The sensor devices have constrained memory, computing power and battery capacity. They gather and deliver data to a BS through mobile D-collectors for data’s further processing by IoT systems. To gather accurate data from sensors, it is important to use a number of mobile D-collectors and effectively use their path of interest. The D-collectors are often low-powered devices integrated on a mobile vehicle (e.g., public vehicle). Thus, the D-collectors in the formed networks are assumed to have limited energy, memory, and computational power. As a result, connecting a secure smart city wireless network to the central BS is challenging. This section mainly introduces some previous research related to our work.
The application of mobile D-collectors for WSN data collection is a common practice for improving the network lifetime, reducing the latency incurred during the transmission [
29,
30,
31] and improving network coverage [
32].
Mobile sink (MS) is adopted as a mobile data collector in performing an effective collection of sensor data in several works, e.g., [
33,
34,
35]. A distributed method, called GTAC-DG (Game Theory and Ant Colony Data Gathering) [
34] takes the benefit of game theory along with ant colony optimization as a swarm intelligence method to select the best path for the MS. The work in [
33] utilizes a network flow approach for data collection, where, fixed-path mobile sink is mapped to a network flow optimization issue. In their work, a data forwarding algorithm was developed for data collection using MS(s) for a path-constrained environment. Best visiting points for mobile sink among clusters are considered in [
35]. Modified Travelling Path Algorithm (MTPA) is proposed in [
34] for data gathering in WSN. MTPA is developed to find the shortest traveling path for the mobile sink.
In [
36], the data collection trajectory of MS is optimized using the Hilbert curve. The network field is divided into clusters, then, for each cluster, a VRP (virtual rendezvous point) is chosen for the MS to visit based on an integer linear program considering optimal communication range between the sensor node and sink.
A three-tier communication-based approach called Fuzzy Logic-based Effective Clustering (FLEC) was proposed in [
37]. In FLEC, data is sent from sensor nodes to cluster-heads (CHs), then to super CHs, and finally to MS. FLEC considers mobile BS that uses a model based on the random way-point mobility in the network without using any path determination method. A mobile data collector (MDC) is employed in [
38] to restore network connectivity. The MDC regularly visits and collects data from partitions. Moreover, the Steiner zone approach is utilized to designate respective data collection points for corresponding partitions.
In [
39], a mobile data collector is employed to act as a broker between WSN nodes and BS, where, the network is divided into four logical partitions and the MDC utilizes a learning automata (LA) to proceed towards the area center or to the network center at regular intervals of time. Based on the learning automaton, updates the best logical partition at each interval selected by the mobile collector. A collaboration between multiple mobile robots and WSNs is adopted in [
40]. Sensor data are routed through mobile robots equipped with a mobile sensor node to a BS.
In [
41], the network is split into sub-clusters based on fuzzy logic, after constructing a Minimum Spanning Tree. Then, cluster heads are chosen based on the number of hops to the root of the tree, the density, the residual energy of nodes, the number of packets to forward, and the node’s centrality. Mobile data collectors begin their trajectory starting from the head node and return to the BS covering the subset of suitable CHs in accordance with their positions.
In [
42], the authors proposed a new approach for optimizing the mobile D-collector path to balance the latency and energy consumption in data collection using a modified Genetic Algorithm (GA). This approach uses a single D-collector for visiting all the nodes in the network and chooses a path that has reduced total path length. Authors in [
43] present rendezvous-based delay-constrained data collecting solutions for WSNs using multiple Mobile Elements (MEs). The proposed methods enhance WSN lifetime utilizing MEs tours planned through higher energy areas of the network and also areas where greater energy consumption has been noticed. By deriving MEs tours that pass through energy-rich areas of the network, as well as regions where increased energy usage has been observed, are used in the proposed approaches to extend network lifetime. A method of data collection based on data volume utilizing MDC was introduced in [
44]. In the proposed technique, MDC moves only to the nodes that produced data while ignoring the remaining nodes in the network.
A lot of studies have focussed on data collection in IoT. In [
45], software architecture is introduced to support the IoT data collection. By processing enormous datasets collected from physical nodes, the architecture supports Big Data analysis. In [
46] authors proposed a data collection algorithm in IoT. During data collection, the proposed algorithm was designed to maximize throughput and reduce traffic congestion. To provide data-centric universal data gathering of hypermedia Big Data in IoT, authors proposed a distributed algorithm named EQRoute in [
47].
In [
48], a mobile data collection approach based on adaptive dual mode routing, called ADRMDGA, is proposed for IoT-based Rechargeable WSNs (RWSNs). In ADRMDGA, a mobile charging vehicle is in charge of performing data collection, and a dual-mode approach is adopted for data routing to balance the energy utilization.
In our work, we address the path planning problem of the mobile D-collectors. One of the most widely adopted methods in this category is a potential field approach [
49,
50] where attractive force towards the target and repulsion by the obstacles are checked to assess the ability to direct the D-collector towards the target. However, this strategy faces the problem of local minimum. Other approaches like probabilistic road map [
51,
52] works through random points generation and collision avoidance check for obstacles, or rapidly expanded random tree [
53] where branches of the tree extended in various directions and are connected to others to produce the route. Other approaches include the use of intelligent route planning schemes [
54,
55]. Although these methods are effective, these solutions cannot be applied in the smart city set-up that requires us to satisfy the constraints of different D-collectors.
There are genetic-based meta-heuristic solutions for various IoT services, including the Hybrid search (HS), Effective Fitness (EF) and HCPF algorithms [
18,
56,
57]. The movement direction of the mobile carrier is considered by EF with certain environmental effects, such as surrounding barriers and paths available to be used with the genetic algorithm. However, HS is a modified and more effective approach that considers the speed of motion while determining the fitness value. In HCPF a hybrid approach of genetic algorithm and improved local search is used to find the path of D-collectors. The work in [
58] investigates an emerging technology known as LoRaWAN (Long Range Wide Area Network) and claims to the current best choice for the major IoT scenario, which includes smart grids. LoRaWAN is a truly convergent, low-cost technology built from the ground up to create urban IoT platforms. The authors in [
58] address the issue of data delivery between smart grid meters using LoRaWAN. For a comprehensive analysis, we have taken a genetic algorithm with HS [
57] and EF [
56], data delivery between smart grid meters using LoRaWAN [
58], and HCPF [
18] to compare the data delivery approach in a smart city scenario. Unfortunately, in some of the above-mentioned collaborative methods, certain criteria such as the total traversed distances, and the current application conditions were not taken into account. Our approach, on the other hand, takes into account D-collectors and different environmental constraints and, as a result, can be applied to manage more challenging environments with various constraints. We also provide a comprehensive framework that addresses multiple challenges that include cost, resource management, and delivery simultaneously.
3. System Model
Smart cities enhance the efficiency of various city operations, including security, tourism, transportation, etc. through a data-driven decision-making process. This phenomenon needs a continuous collection of information from sensors deployed across the city [
59]. To ensure data collection from sensors spread across the city, this paper presents mobile data collection schemes focusing on the use of a minimum number of D-collectors with minimum traveled distance satisfying different smart city constraints. In the following, we discuss the problem statement and constraints, network model, and energy and communication model of our approach.
3.1. Problem Statement and Constraints
In a smart city, we practice handling multiple users with different attributes, such as throughput, reliability, and latency, simultaneously. This is a critical area that has not received sufficient research consideration. The major challenge in managing the heterogeneous flow of traffic in the underlying sensor networks arises from the simultaneous processing of user requests with varying requirements. To address this challenging issue, we suggest an approach that uses smart mobile devices known as Mobile D-collectors. To reduce the total number of D-collectors and their total traveled distances, we propose an algorithm called BAT Algorithm based D-collector Path Planning (BDPP).
We state the problem as: Given a set of D-collectors with limited storage and predefined trajectories in the coverage of a set of APs, determine the least number of D-collectors that can transfer data traffic of these Access Points (APs) while maintaining storage capacity limitations and D-collectors short travel distance.
The scenario above can be seen in a smart city network, i.e., data gathered by smart city sensors is sent to the access point (AP), and the AP needs to send this data to the BS. To efficiently utilize the APs’ resources (e.g., energy), a public vehicle (e.g., taxi, transport bus) will be used as a mobile D-collectors with a fixed storage capacity to transmit this data to the BS. There are numerous public vehicles available throughout the city for this purpose. Our goal is to efficiently select the optimal number of such public transport vehicles with minimum travel distance.
In our model, we consider the following inputs:
Following describes the constraints used in our work:
Each D-collector is associated with exactly one route.
Set of routes (or one route) forms a path and that path may cover all APs in the network. A route contains a subset of APs.
Each AP should be assigned to one D-collector (visited once).
Sum of traffic loads of all APs in a route of a D-collector cannot be more than the storage capacity of that D-collector.
3.2. Network Model
In this work, a two-tier telecommunication framework is considered [
60], which consists of three components: BS, Mobile D-collectors and Access point (AP) (in
Figure 1). In the bottom layer, it includes the sensor nodes (SN) that sense their surroundings and transmit the sensed data towards APs in the network. To save energy, these sensor nodes usually possess fixed and restricted transmission ranges and they do not relay traffic [
18]. APs in the top tier gather the data from the SN and deliver it to the D-collector present in their communication range. APs and D-collectors present in the top tier have a longer transmission range and connect with the BS on a regular basis to hand over the collected data from the bottom-tier. Each D-collector will start and end in the BS, and is equipped with wireless transceivers. In addition, at the top of our specific architecture, we determine the size of the data packets as well as the order of the targeted intermediate nodes, each of which has a load that must be transmitted to the BS. A data packet contains data traffic from a group of APs in the network. Each AP transmits its sensed data to BS via other APs/D-collector in a multi-hop fashion. D-collectors are in charge of delivering data loads from APs to the destination (BS or AP) once they reach its communication range.
3.3. Energy and Communication Model
The mobile D-collectors energy supply can either be restricted or unlimited. When a D-collector has an unlimited energy supply (rechargeable or simply sufficient energy with respect to the APs’ expected lifetime), D-collector placement is to provide access to a limited range of APs that meet the constraints. If D-collectors have limited energy supply, the D-collectors selection is done such that it ensures the connectivity of the APs and guarantees that the path of the D-collector towards the BS is constructed without any violation of energy limits. In this work, we assume that the power supply for D-collectors a limited and fixed.
The energy consumption model used is similar to [
61], and described as follows:
where
and
are the transmission and reception energy for
b bits to a distance
r, respectively.
is the electronics energy,
is the amplifier energy and
is the path-loss exponent. According to [
61], values of r is 50 m,
is 50 nJ/bit,
is 0.1 nJ/bit/m
2,
is 2. So energy consumed in a round
j by a sensor node can be written as
If
represents the node’s initial energy at the start of a round, then the energy at the end of the round can be computed as,
. Based on [
62], the total consumed energy of D-collector to receive the packet is
where
and
are the power needed to run the processing circuit of the receiver and the transmitter.
and
represents the size of data packet sent from SN to D-collector and size of the acknowledgement, and
and
are the respective data rates,
is the transmission power,
k is the power amplifier efficiency and
y and
x values are based on the forward and backward link reliability respectively.
We follow the same communication model in [
18], which is given as follows: According to the log-normal shadowing model, the signal level at a distance
d from the transmitter follows a log-normal distribution centered on the average value of power at that point. We can represent it as,
In Equation (
5),
d is the Euclidean distance from the transmitter to receiver,
is the random variable indicating the signal attenuation effect,
represents the path loss exponent, and
is a constant computed according to the receiver, transmitter, and field mean heights. Let the value of
represents the minimum acceptable signal level to keep the connectivity. Based on a probabilistic model of communication, the probability that two devices located
d distance apart will be able to communicate is calculated as follows:
where
=
10 log (K). Thus, the connectivity probability given by
is not only a function of the distance but also of the surrounding terrain and obstacles, which can induce multipath and shadowing effects (portrayed by
) [
18]. The values of these parameters are taken from [
18].
5. Example Scenario
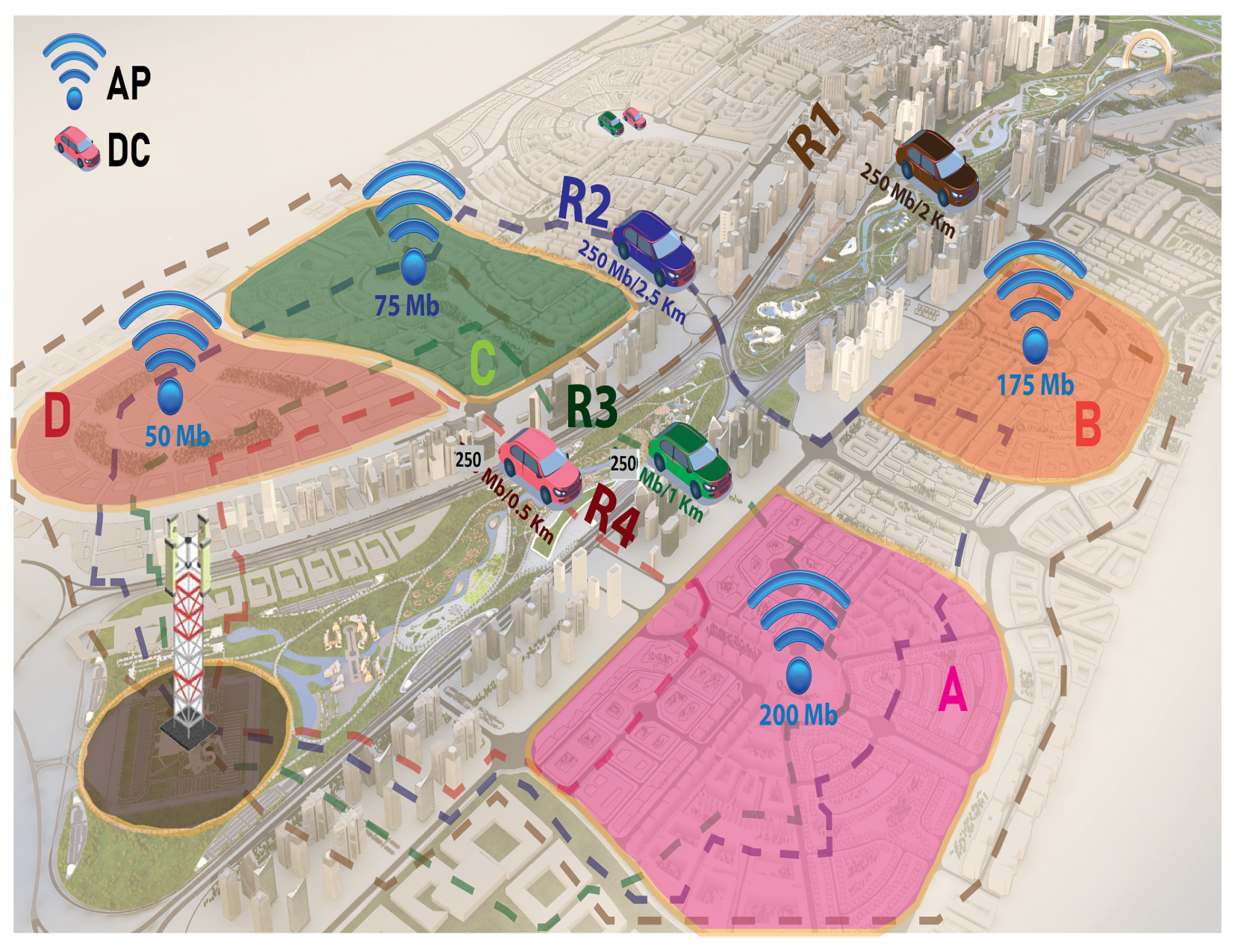
We elaborate more on our proposed BDPP approach in this section, through a traditional delay-tolerant communication scenario in an urban area. We present an example of the APs in four regions A, B, C, and D of a city, with one or more routes connecting to the BS via some D-collectors, as shown in
Figure 6.
Consider that each D-collector route has its travel distance and end-to-end storage capability as suggested in the format (capacity/distance constraints) of the BDPP approach, which is also shown in
Figure 6. These features are according to the routing table exchange between D-collectors and APs. By using our fitness function in Equation (
12), the BDPP will select a minimum D-collector without violating the D-collector capacity constraints and minimum distance travel criteria.
For example, AP B in
Figure 6 wants to deliver packets with a data load that necessitates a D-collector capability of at least 175 MB. BDPP found three different routes R1, R2, and R3 connecting Access Point B to the BS. All these three routes satisfy the capacity constraints. Hence, the least distance route among these three will be selected, and it is route R3. It is also possible to serve AP C, as the D-collector still satisfies the capacity constraint. The D-collector route R4, which passes through cities A and D, will then be used to transmit its corresponding data. Therefore, the routes chosen will be:
Route 1: BS B C
Route 2: BS A D
If we choose R1 or R2 instead of R3, the D-collector capacity constraint is met, but it does not provide the total minimum distance travel criteria. Selecting the least count of D-collectors in the vicinity of each AP is attained through frequent exchange of logging records and routing tables with Base Stations, to transmit delay tolerant data packets in the network [
18]. At the start of each triggered round, this selection method is repeated.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}