
Towards Optimal Dissemination of Emergency Messages in Internet of Vehicles: A Dynamic Clustering-Based Approach



Abstract
:1. Introduction
2. Literature Review
2.1. DSRC-Based Data Dissemination
2.2. LTE-Based Data Dissemination
2.3. Hybrid (DSRC/Cellular LTE) Based Data Dissemination
3. Dynamic Clustering-Based Dissemination Approach
3.1. System Model and Assumptions
- Each vehicle in the network has a unique id.
- Each vehicle can calculate its velocity and is able to deduce its current position using a GPS device.
- Vehicles can discover others within their communication range through periodic beacon messages.
- The urban scenario has two roads (one for each direction), and three lanes for each road.
- Several LTE Antennas (eNodeB) with a transmission range of 1.5 km are installed every 3 km at the side of the intersection area, to cover the entire vehicular network.
- OBU (On-Board Unit): A terminal element placed on the vehicle that offers wireless communication interfaces (IEEE 802.11p and LTE), between the vehicle and its nearby vehicles, and with LTE-V infrastructures.
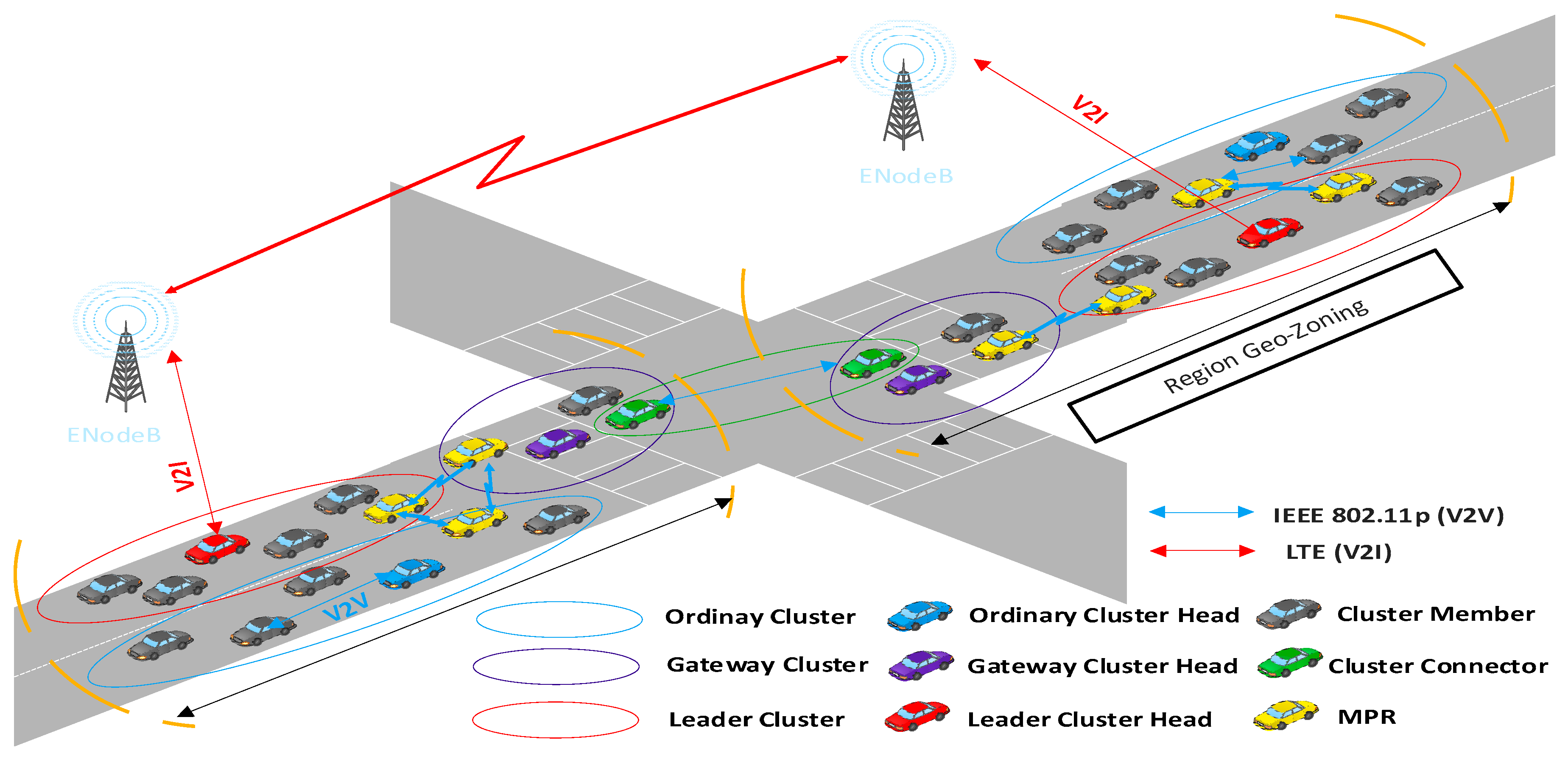
- Region Geo-Zoning: the LTE infrastructure used in our EMD-IoV approach is responsible for data dissemination inside a geographical region (based on LTE eNodeB Antenna). We use LTE networks to provide low latency, high coverage, and robust mechanisms dealing with high vehicle mobility. The coverage area with eNodeB is specified as the urban geographical area in our approach, wherein virtual groups of vehicles are created with a unique ID for eNodeB.
- Leader Cluster (LC): in charge of coordination and communication with other clusters and network infrastructures. Moreover, LC may perform other tasks, such as relaying information between nodes in the same cluster (intra-cluster communication) or between different clusters (inter-cluster communication). Compared with other nodes in the cluster, the LC also has other additional functions, such as data aggregation and channel access management.
- Gateway Cluster (GC): a gateway cluster is a non-ordinary cluster located within the boundaries of the region which forwards the emergency message between regions via cluster connector (CC). Gateway Cluster (GC) selection is an important task of a Leader Cluster (LC). In the cluster gateway selection algorithm, the leader of the clusters chooses a set of suitable clusters to become cluster gateways. Gateways Cluster Heads (GCH) are the main participants in the delivery of data within regions.
- Ordinary Cluster (OC): an ordinary group of vehicles that join a cluster according to their characteristics and similarities. OC is responsible for sending application-based information and data to the CH at specific time intervals.
3.2. Clustering Scheme
3.2.1. Cluster State
3.2.2. Node State
- In an Ordinary Cluster (OC), the vehicle can be in three states. If the vehicle is located in the center of the cluster, it is the most qualified to act as a leader and takes the Ordinary Cluster Head (OCH) state. The rest of the nodes will be cluster members (CM), or Multi Point Relay (MPR) if they are located on the edges of the cluster.
- When a vehicle transits from OC to LC, it switches from the OCH state to a Leader Cluster Head (LCH) state, otherwise it will be a CM or MPR in the new cluster. A CM can also transit to the MPR state, while the latter can also convert to a CM state.
- When an OC becomes a Gateway Cluster (GC), OCH becomes a Gateway Cluster Head (GCH); otherwise, it can be in a CM state or in an MPR state, whereas CM can take the Cluster Connector (CC) state if it can communicate with a vehicle in the GC located in another region. MPR can also switch to CM or CC states. The possible transition from one state to another is triggered by events as illustrated in Table 3.
3.2.3. Clusters Formation
Neighbor Discovery
Ordinary Cluster and Ordinary Cluster Head
| Algorithm 1. Ordinary cluster creation | |
| 1: | Input: |
| 2: | TimeNow: Current time; |
| 3: | ,, ∈ V; |
| 4: | : vehicle reliability of ; |
| 5: | : Neighbors vehicles of vehicles |
| 6: | Output: |
| 7: | Launch the processing election |
| 8: | ForEach not registered new neighbor vehicle within WaitTime Ϥ DO |
| 9: | broadcasts Election message for election new cluster head |
| 10: | ForEach vehicle when receives an election and WaitTime Ϥ not expired DO |
| 11: | Launch the processing election (Algorithm 2) |
| 12: | EndEach |
| 13: | EndEach; |
| Algorithm 2. Ordinary Cluster Head (OCH) |
| 1: Input |
| 2: , , ∈ V; |
| 3: : vehicle reliability of ; |
| 4: : Neighbors vehicles of vehicles |
| 5: Output: |
| 6: Selected OCH and OCM |
| 7: At receiving an Election message by a and , ≠ DO |
| 8: computes its |
| 9: If ( > VR_) then |
| 10: Changes state to Ordinary Cluster Head (OCH) |
| 11: Broadcasts Ack message to |
| 12: Endif |
| 13: End; |
| 14: Each vehicle ∈ receives Ack() DO |
| 15: Changes state to cluster member (OCM) |
| 16: EndEach; |
| Algorithm 3. Multi Point Relay selection. | |
| 1: | Input |
| 2: | OCMi, OCMj, OCMn ∈ Ordinary cluster member |
| 3: | Output: |
| 4: | Selected MPROCi |
| 5: | At receiving at Hello message by an OCMi and i ≠ n DO |
| 6: | If (OCH.OCMn ≠ OCH.OCMi) then |
| 7: | OCMi changes state to MPROCi |
| 8: | The MPROCi sends Select_MPR (MPROCi, OCHi) message to OCHi |
| 9: | OCHi registers in MPR table the MPROCi (Neighbored cluster) |
| 10: | Endif |
| 11. | End |
Leader Cluster and Leader Cluster Head
| Algorithm 4. Leader Cluster Head selection (LCH) | |
| 1: | Input |
| 2: | OCHi, OCHj, OCHn ∈ Ordinary cluster head |
| 3: | B1,B2,…,Bn: eNodeB |
| 4: | LQEoch: link quality estimation Between OCH and eNodeB |
| 5: | Output: |
| 6: | Selected LCHs |
| 7: | FOR EACH eNodeB Bi have not leader cluster head DO |
| 8: | If not registered Leader Cluster Head Do |
| 9: | Broadcasts Request_LCH message to all OCHi via LTE interface |
| 10: | Bi Starts timer for waiting time ƍ |
| 11: | EndIf |
| 12: | If (Bi receives Candidate LCH message) then |
| 13: | Bi Registers in table candidate the vehicles OCHi and their LQE(OCHi,Bi) |
| 14: | Endif |
| 15: | If (waiting time ƍ is expired) then |
| 16: | Bi selects best vehicle OCHj based on LQE and sends Select_ LCH(Bi,OCHj) to it |
| 17: | Registers in table the Leader Cluster Head (LCH) information |
| 18: | EndIf |
| 19: | EndForEach; |
| 20: | FOR EACH OCHi in region Bi DO |
| 21: | If OCHi receives a Request_LCH message via through LTE interface Do |
| 22: | It computes ITS LQEj and resends to eNodeB Bi Candidate LCH message containing this value |
| 23: | EndIf |
| 24: | If OCHi receives a Select_LCH(Bi,OCHn) message via LTE interface Do |
| 25: | If (OCHi==OCHn) then |
| 26: | Changes state from OCHi to LCHi |
| 27: | Else |
| 28: | Registers in table the Leader Cluster Head (LCH) information of its region |
| 29: | Endif |
| 30: | EndIf |
| 31: | EndForEach; |
Gateway Cluster and Cluster Connector
| Algorithm 5. Gateway Cluster Head (GCH) Selection | |
| 1: | Input: |
| 2: | OC1, OC2, OC3: ordinary cluster |
| 3: | REi,REj: REid, id of the region |
| 4: | B1, B2,…,Bn: eNodeB |
| 5: | N(OCi): Neighbors clusters of cluster i |
| 6: | Output: |
| 7: | Selected GCHs |
| 8: | FOR EACH OCi in region Bi DO |
| 9: | If OCi ∈ REi receives Hello Message From OCj ∈ REj and OCj ∈ N(OCi) then |
| 10: | OCi discovers (Through OCHi or MPRi) new neighboring region REj |
| 11: | When OCi Changes stat to GC (OCH to GCH) DO |
| 12: | GCHi selects only one node connecter in neighbor regionwhere MPRi changes stat to CCi or OCMi to CCi |
| 13: | The new GCHi sends Gateway_Selection to LCHi |
| 14: | EndWhen |
| 15: | EndIf |
| 16: | EndEach |
3.3. Routing Scheme
3.3.1. Optimal Forwarding in Intra-Region
| Algorithm 6. Optimal Forwarding Intra-Region | |
| 1: | Input |
| 2: | OC1, OC2, OC3: ordinary cluster |
| 3: | LC: leader cluster |
| 4: | LCH: leader cluster head |
| 5: | RT_OCi: routing table for ordinary cluster i |
| 6: | Output: |
| 7: | Selected next relay to forward the data. |
| 8: | Once LC selected, LC broadcasts REQUEST_ROUTE Message each Ti WaitTime then |
| 9: | REQUEST_ROUTE Message propagates between ordinary clusters (OC1, OC2,…, OCn) through MPRs. |
| 10: | ONCE each OCi received this message then |
| 11: | If (OCi‘s ID not included in REQUEST_ROUTE Message) Then |
| 12: | Registers the path between LC and OCi in its routing table RT_OCi, |
| 13: | Add to this message (FLAG PATH) its ID and rebroadcasts to neighbors clusters. |
| 14: | Else |
| 15: | Deletes this message |
| EndIf | |
| 17: | EndOnce |
| 18: | EndOnce |
| 19: | Once OCHi receives SEND_DATA (message) from OCMi then |
| 20: | IF (SEND_DATA is emergency message (REAL TIME)) then |
| 21: | If (SEND_DATA.destination existed in routing table) Then |
| 22: | SEND this message through all existing paths |
| 23: | Else |
| 24: | SEND this message through all existing paths towards LCH |
| 25: | ELSE |
| 26: | If (SEND_DATA.destination existed in routing table) Then |
| 27: | SEND this message through best existed path |
| 28: | Else |
| 29: | SEND this message through best existed path towards LCH |
| 30: | EndIf |
| 31: | EndOnce |
3.3.2. Region Geo-Zoning through LTE eNodeB
| Algorithm 7. UPDATE Geo-zoning | |
| 1: | Input |
| 2: | LC_Bx: leader cluster in Geo-Zoning Bx |
| 3: | N2H(Bx): two hop neighbor regions for geo-Zoning Bx |
| 4: | Output: |
| 5: | Routing map for LC_Bx (two-hop neighboring geo-Zoning) |
| 6: | Each (ϑ time where LC_Bx ∈ Geo-Zoning Bx) |
| 7: | LC_Bx Sends UPDATE_Geo-Zoning message for two-hop neighbor regions (N2H(Bx)) through LTE interface |
| 8: | Each (LC_By where x ≠ y receives this message) then |
| 9: | Constructs its routing map for two-hop neighboring geo-Zoning. |
| 10: | EndEach |
| 11: | EndEach |
3.3.3. Optimal Forwarding in Inter-Region
| Algorithm 8. Optimal Forwarding Inter-Region. |
| 1: Input |
| 2: TimeNow: Current time; |
| 3: Vi_OCj_REk: IDVehciule_IDOrdinaryCluster_IDRegion |
| 4: OC1_RE1: ID_OrdinaryCluster_IDRegion |
| 5: LC_RE1 |
| 6: OC1, OC2, OC3: Ordinary Cluster |
| 7: LC1: Leader Cluster |
| 8: GC1, GC2: Gateway Cluster |
| 9: : Vehicle Reliability of |
| 10: REi,REj: REid, ID of the region |
| 11: B1: eNodeB |
| 12: LQEoch: link quality estimation Between OCH and eNodeB |
| 13: : Neighbors vehicles of vehicles |
| 14: RT_OCi: routing table for ordinary cluster |
| 15: Output: |
| 16: Calculates the optimal path for inter-region dissemination |
| 17: If (Vi_OCj_REx wants to send en emergency message) then |
| 18: Vi_OCj_REx sends the message to its ordinary cluster head OCHj |
| 19: If (message’s destinations are vehicles in same region REx) then |
| 20: Use Algorithm Routing Intra-Region |
| 21: Else |
| 22: OCHj_REx adds extern region flag to this message |
| 23: OCHj_REx sends this message to LCH_REx through existed routes in the routing |
| table RT_OCi |
| 24: EndIf |
| 25: If LCH_REx receives data message from OCHj_REx then |
| 26: If (Destination of this message existed in two hop neighbor regions) then |
| 27: If (the DSRC interface may satisfy delay requirement of this data |
| message) then |
| 28: Sends the message through existing route in inter-region |
| routing table with GCi_REx Gate |
| 29: Else |
| 30: Sends the message through LTE interface to destination |
| Regions |
| 31: EndIf |
| 32: Else |
| 33: Sends the message through LTE interface to destination regions |
| 34: EndIf |
| 35: EndIf |
| 36: Each LCH_REy receives the message from GCj_REy where x ≠ y then |
| 37: IF (message’s vehicle destination is in region REy) then |
| 38: Sends this message through best existing path to OCHj, |
| 39: ELSE |
| 40: Sends the message through existing routes in inter-region routing |
| table with GCj_REy Gate |
| 41: EndIf |
| 42: EndEach |
4. Performance Evaluation
4.1. Simulation Parameters
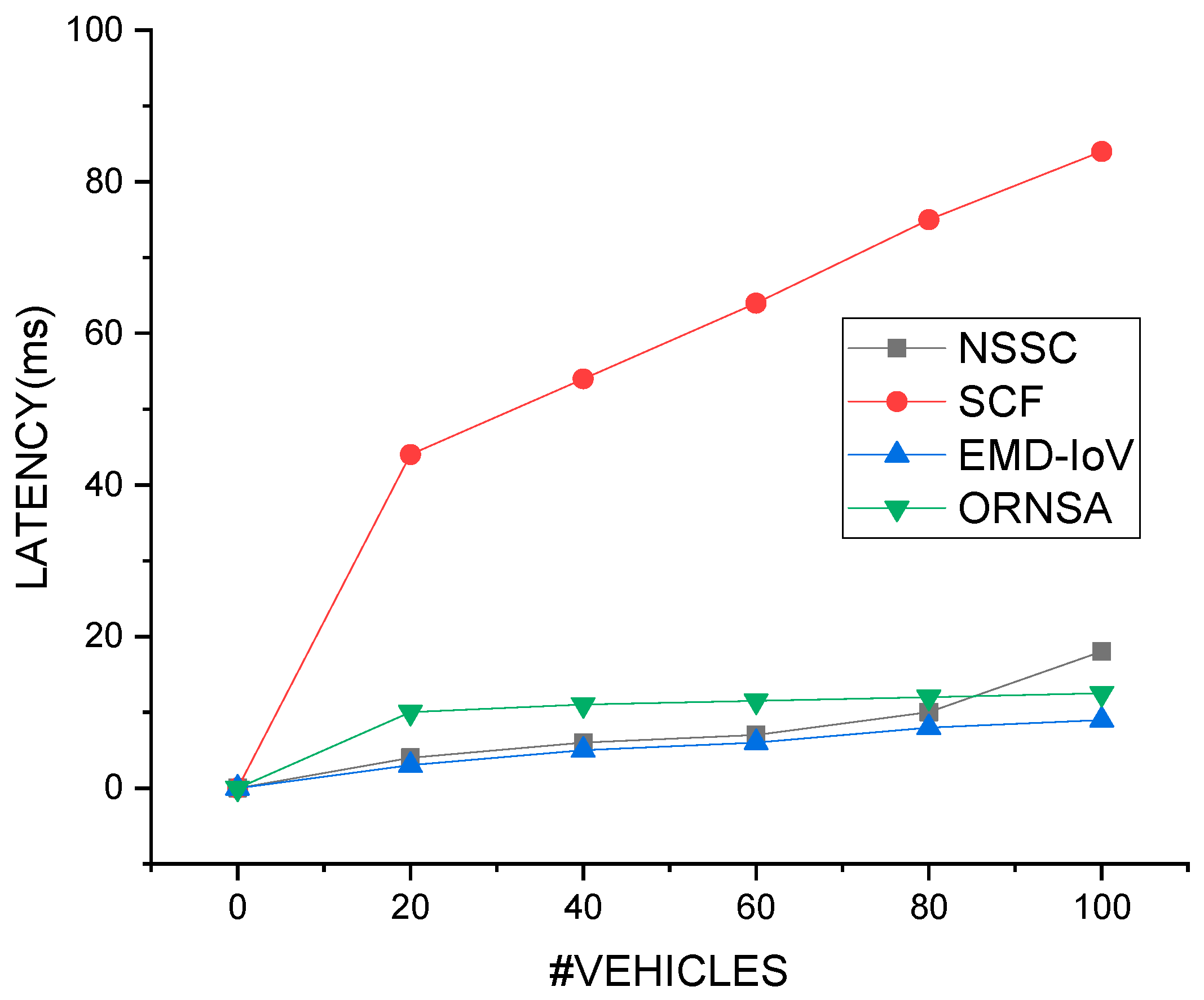
4.2. Latency
4.3. Average Number of Collisions
4.4. Packet Delivery Ratio (PDR)
4.5. Throughput
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Storck, C.R.; Duarte-Figueiredo, F. A 5G V2X Ecosystem Providing Internet of Vehicles. Sensors 2019, 19, 550. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahn, S.; Choi, J. Internet of Vehicles and Cost-Effective Traffic Signal Control. Sensors 2019, 19, 1275. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef] [Green Version]
- Lagraa, B.B.N.; Lakas, A.; Ghamri-Doudane, Y. RCS-VC: Renting out and consuming services in vehicular clouds based on LTE-A. In Proceedings of the 2015 Global Information Infrastructure and Networking Symposium (GIIS), Guadalajara, Mexico, 28–30 October 2015; pp. 1–6. [Google Scholar]
- Azzaoui, N.; Korichi, A.; Brik, B.; Fekair, M.E.A.; Kerrache, C.A. On the Communication Strategies in Heterogeneous Internet of Vehicles. In The Proceedings of the Third International Conference on Smart City Applications; Springer: Cham, The Netherland, 2019; pp. 783–795. [Google Scholar]
- Do, D.-T.; Van Nguyen, M.-S.; Le, A.-T.; Rabie, K.M.; Zhang, J. Joint Full-Duplex and Roadside Unit Selection for NOMA-Enabled V2X Communications: Ergodic Rate Performance. IEEE Access 2020, 8, 140348–140360. [Google Scholar] [CrossRef]
- Do, D.T.; Le, T.A.; Nguyen, T.N.; Li, X.; Rabie, K.M. Joint Impacts of Imperfect CSI and Imperfect SIC in Cognitive Ra-dio-Assisted NOMA-V2X Communications. IEEE Access 2020, 8, 128629–128645. [Google Scholar] [CrossRef]
- Ang, L.-M.; Seng, K.P.; Ijemaru, G.K.; Zungeru, A.M. Deployment of IoV for Smart Cities: Applications, Architecture, and Challenges. IEEE Access 2019, 7, 6473–6492. [Google Scholar] [CrossRef]
- Shen, X.; Li, J.; Chen, L.; Chen, J.; He, S. Heterogeneous LTE/DSRC Approach to Support Real-time Vehicular Communications. In Proceedings of the 2018 10th International Conference on Advanced Infocomm Technology (ICAIT), Stockholm, Sweden, 12–15 August 2018; pp. 122–127. [Google Scholar]
- Azzaoui, N.; Korichi, A.; Brik, B.; Fekair, M.E.A.; Kerrache, C.A. Wireless communication in internet of vehicles networks: DSRC-based Vs cellular-based. In Proceedings of the 4th International Conference on Smart City Applications—SCA’ 19, Casablanca, Morocco, October 2019; ACM: New York, NY, USA, 2019; p. 23. [Google Scholar]
- Tamani, N.; Brik, B.; Lagraa, N.; Ghamri-Doudane, Y. Vehicular Cloud Service Provider Selection: A Flexible Approach. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Road Accidents in the United States—Statistics & Facts. Available online: https://www.statista.com/topics/3708/road-accidents-in-the-us/ (accessed on 15 February 2021).
- Congestion Costs U.S. Cities Billions Every Year. Available online: https://www.statista.com/chart/21085/annual-economic-losses-from-traffic-congestion/ (accessed on 15 February 2021).
- Ali, M.; Malik, A.W.; Rahman, A.U.; Iqbal, S.; Hamayun, M.M. Position-based emergency message dissemination for Internet of vehicles. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719861585. [Google Scholar] [CrossRef] [Green Version]
- Tian, D.; Liu, C.; Duan, X.; Sheng, Z.; Ni, Q.; Chen, M.; Leung, V.C.M. A Distributed Position-Based Protocol for Emergency Messages Broadcasting in Vehicular Ad Hoc Networks. IEEE Internet Things J. 2018, 5, 1218–1227. [Google Scholar] [CrossRef]
- Do, D.-T.; Van Nguyen, M.-S.; Voznak, M.; Kwasinski, A.; de Souza, J.N. Performance Analysis of Clustering Car-Following V2X System with Wireless Power Transfer and Massive Connections. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Liu, L.; Chen, C.; Qiu, T.; Zhang, M.; Li, S.; Zhou, B. A data dissemination scheme based on clustering and probabilistic broadcasting in VANETs. Veh. Commun. 2018, 13, 78–88. [Google Scholar] [CrossRef]
- Brik, B.; Lagraa, N.; Cherroun, H.; Lakas, A. Token-based Clustered Data Gathering Protocol (TCDGP) in vehicular networks. In Proceedings of the 2013 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 1070–1074. [Google Scholar]
- Brik, B.; Lagraa, N.; Lakas, A.; Cherroun, H.; Cheddad, A. ECDGP: Extended cluster-Based data gathering protocol for vehicular networks. Wirel. Commun. Mob. Comput. 2015, 16, 1238–1255. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, T.D.; Le, T.-V.; Pham, H.-A. Novel store–carry–forward scheme for message dissemination in vehicular ad-hoc networks. ICT Express 2017, 3, 193–198. [Google Scholar] [CrossRef]
- Latif, S.; Mahfooz, S.; Ahmad, N.; Jan, B.; Farman, H.; Khan, M.; Han, K. Industrial Internet of Things Based Efficient and Reliable Data Dissemination Solution for Vehicular Ad Hoc Networks. Wirel. Commun. Mob. Comput. 2018, 2018, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Alsuhli, G.H.; Khattab, A.; Fahmy, Y.A. Double-Head Clustering for Resilient VANETs. Wirel. Commun. Mob. Comput. 2019, 2019, 1–17. [Google Scholar] [CrossRef]
- Tambawal, A.B.; Noor, R.M.; Salleh, R.; Chembe, C.; Oche, M. Enhanced weight-based clustering algorithm to provide reliable delivery for VANET safety applications. PLoS ONE 2019, 14, e0214664. [Google Scholar] [CrossRef]
- Alkhalifa, I.S.; Almogren, A.S. NSSC: Novel Segment Based Safety Message Broadcasting in Cluster-Based Vehicular Sensor Network. IEEE Access 2020, 8, 34299–34312. [Google Scholar] [CrossRef]
- Aissa, M.; Bouhdid, B.; Ben Mnaouer, A.; Belghith, A.; Alahmadi, S. SOFCluster: Safety-oriented, fuzzy logic-based clustering scheme for vehicular ad hoc networks. Trans. Emerg. Telecommun. Technol. 2020, 20, e3951. [Google Scholar] [CrossRef]
- Feng, D.; Yajie, M.; Fengxing, Z.; Xiaomao, W.; Kai, H. A Safety Message Broadcast Strategy in Hybrid Vehicular Network Environment. Comput. J. 2017, 61, 789–797. [Google Scholar] [CrossRef]
- Ebadinezhad, S.; Dereboylu, Z.; Ever, E. Clustering-Based Modified Ant Colony Optimizer for Internet of Vehicles (CACOIOV). Sustainability 2019, 11, 2624. [Google Scholar] [CrossRef] [Green Version]
- Guangjin, H.; Guang, Y.; Yubao, C.; ChaoFeng, M. Design and Implementation of Traffic Incident Acquisition and Reporting Device Based on LTE Communication. J. Phys. 2020, 1486, 022023. [Google Scholar] [CrossRef]
- Aadil, F.; Ahsan, W.; Rehman, Z.U.; Shah, P.A.; Rho, S.; Mehmood, I. Clustering algorithm for internet of vehicles (IoV) based on dragonfly optimizer (CAVDO). J. Supercomput. 2018, 74, 4542–4567. [Google Scholar] [CrossRef]
- Lin, F.; Liu, Y. An integration of WAVE and LTE wireless transmission in vehicle networks for safety and non-safety messages dissemination. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu China, 13–16 December 2017; pp. 315–320. [Google Scholar]
- Wu, C.; Yoshinaga, T.; Chen, X.; Zhang, L.; Ji, Y. Cluster-Based Content Distribution Integrating LTE and IEEE 802.11p with Fuzzy Logic and Q-Learning. IEEE Comput. Intell. Mag. 2018, 13, 41–50. [Google Scholar] [CrossRef]
- Tseng, H.-W.; Wu, R.-Y.; Lo, C.-W. A stable clustering algorithm using the traffic regularity of buses in urban VANET scenarios. Wirel. Netw. 2019, 26, 2665–2679. [Google Scholar] [CrossRef]
- Senouci, O.; Harous, S.; Aliouat, Z. A New Heuristic Clustering Algorithm Based on RSU for Internet of Vehicles. Arab. J. Sci. Eng. 2019, 44, 9735–9753. [Google Scholar] [CrossRef]
- Ahmad, A.; Din, S.; Paul, A.; Jeon, G.; Aloqaily, M.; Ahmad, M. Real-Time Route Planning and Data Dissemination for Urban Scenarios Using the Internet of Things. IEEE Wirel. Commun. 2019, 26, 50–55. [Google Scholar] [CrossRef]
- Simulation of Urban Mobility. SUMO Official Web Site. Available online: https://www.eclipse.org/sumo/ (accessed on 24 August 2020).
- VEINS. The Open Source Vehicular Network Simulation Framework. Available online: https://veins.car2x.org/ (accessed on 25 August 2020).
- LTE. Use Plane Simulation Model for INET & OMNET++. Available online: http://veins-lte.car2x.org/ (accessed on 25 August 2020).
- OMNeT++ Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 20 August 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| IoT | Internet of Things |
| VANET | Vehicular Ad-hoc Network |
| ITS | Intelligent Transport System |
| VSN | Vehicular Sensor Network |
| IoV | Internet of Vehicle |
| OBU | On-Board Unit |
| V2V | Vehicle-to-Vehicle |
| V2I | Vehicle to Infrastructure |
| V2R | Vehicle-to-Road |
| V2P | vehicle to Pedestrian |
| V2H | Vehicle to Home |
| V2G | Vehicle to Grid |
| V2X | Vehicle to Everything |
| EM | Emergency Message |
| UV | Un-clustered-Vehicles |
| FV | Forwarder Vehicle |
| OC | Ordinary Cluster |
| CM | Cluster Member |
| OCM | Ordinary Cluster Member |
| OCH | Ordinary Cluster Head |
| MPR | Multi Point Relay |
| MPROC | Multi Point Relay of Ordinary Cluster |
| LC | Leader Cluster |
| LCH | Leader Cluster Head |
| GC | Gateway Cluster |
| GCH | Gateway Cluster Head |
| CC | Cluster Connector |
| RSU | Road Side Unit |
| DSRC | Dedicated Short Range Communications |
| LTE | Long Term Evolution |
| eNodeB | evolved Node-B |
| LR | Link Reliability |
| QoS | Quality of Service |
| VR | Vehicle Reliability |
| LQE | Link Quality Estimation |
| RT | Routing Table |
| RE | Region |
| Ref. | Proposed Solution | Strategy | Communication Model/Using Technology | Selection CH Metrics | Environment | Simulation Scenarios/Tools |
|---|---|---|---|---|---|---|
| Alsuhli, et al. (2019) [22] | Double-head clustering Algorithm (DHC) | Clustering | V2V (DSRC) | speed, position, direction, communication link quality, popularity link expiration time | Vanet | urban and highway (NS3) |
| Alkhalifa, et al. (2020) [24] | Novel Segment Based Safety Message Broadcasting in Cluster (NSSC) | clustering, broadcasting, forwarding | V2V (IEEE 802.11p) | optimal CH: using CCS algorithm (Mobility, Connectivity) | VSN | urban (Omnet) |
| Senouci et al. (2019) [33] | Heuristic clustering algorithm based on RSU (HCAR) | clustering, broadcasting | V2V/V2I (IEEE 802.11p) (LTE) | velocity, degree, transmission range | IoV | highway (NS2) |
| Guangjin et al. (2020) [28] | Traffic incident acquisition and reporting device | Broadcasting | V2I/I2V (4G/LTE-V2X) | -------------- | IoV | urban |
| Latif et al., 2018 [21] | Data dissemination protocol for VANETs (DDP4V) | carry forward mechanism | V2V (802.11p) | -------------- | Vanet | highway and urban (Omnet) |
| Nguyen et al. (2017) [20] | Store-carry-forward scheme for message dissemination (SCF) | store carry forward | V2V (802.11p) | -------------- | Vanet | highway (Omnet) |
| Tseng et al. (2019) [32] | Clustering algorithm using the traffic regularity of buses (CATRB) | Clustering | V2V/V2I (IEEE 802.11p) (LTE) | velocity, position, and direction (CH in the center of the cluster) | Vanet | urban |
| Lin et al. (2017) [30] | Integration of WAVE and LTE in Vehicle Networks for Messages Dissemination (IWL-VNMD) | Forwarding | V2V/V2I (IEEE 802.11p) (LTE) | -------------- | Vanet | urban (NS3) |
| Ebadinezhad et al. (2019) [27] | Clustering algorithm based on modified ant colony optimizer (CACOIOV) | metaheuristic clustering | V2X (5G) | node speed, distance, direction, local traffic density using DA-TRLD algorithm | IoV | highway (NS2) |
| Bello et al. (2019) [23] | enhanced weight-based clustering algorithm (EWCA) | Clustering | V2V (DSRC) | highest weight value (speed, distance, and connectivity level) | Vanet | highway (NS3) |
| Aissa et al. (2020) [25] | novel cluster-head (CH) selection scheme | Clustering | V2V/V2I (DSRC) | intervehicle distance | Vanet | urban and highway (Omnet) |
| Feng et al. (2018) [26] | safety message broadcast strategy (SMBS) | broadcasting, forwarding | V2V/V2I (4G LTE) | optimal forwarder (link stability, signal strength, channel quality) | Vanet | highway (NS2) |
| Wu et al. (2018) [31] | cluster-based protocol integrating LTE with IEEE 802.11p | Clustering | V2V (IEEE 802.11p) (LTE) | (velocity, distribution, channel condition) using fuzzy logic based algorithm | Vanet | highway (NS2) |
| Adil et al. (2018) [29] | clustering algorithm based on dragonfly optimization (CAVDO) | metaheuristic clustering | V2X (5G) | distance, speed, direction | IoV | highway (Matlab) |
| Awais Ahmad et al. (2019) [35] | real-time data dissemination scheme | Forwarding | V2R/V2S/V2X | -------------- | Vanet | urban (NS3) |
| CM | OCH | MPR | CC | LCH | GCH | |
|---|---|---|---|---|---|---|
| UV | join a cluster | election process | join a cluster as gateway CM | / | / | / |
| CM | / | best VR | location change | location change | / | / |
| OCH | become CM | / | gateway role with neighbor cluster | / | Best LQE/ selection_LCH | gateway role with neighbor region |
| MPR | location change | become an OCH | / | gateway role with neighbor region | / | / |
| CC | location change | / | / | / | / | / |
| LCH | / | location change | / | / | / | geographical location change |
| GCH | / | leaving cluster | / | / | / | / |
| Parameter | Value |
|---|---|
| Omnet version | 4.6 |
| Sumo version | 0.25.0 |
| Veins version | 4.4 |
| Simulation Area | 10 km × 10 km |
| Simulation time | 800 s |
| Number of vehicles | 100 |
| Vehicle velocity | 50 km/h |
| Mobility model | Manhatan |
| Number of Antenna | 9 |
| Communication standard | IEEE 802.11p, LTE |
| Antenna type | Omni-directional |
| Packet size | 512 bytes |
| Packets interval | 1 s |
| Transmission range | 250 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azzaoui, N.; Korichi, A.; Brik, B.; Fekair, M.e.A. Towards Optimal Dissemination of Emergency Messages in Internet of Vehicles: A Dynamic Clustering-Based Approach. Electronics 2021, 10, 979. https://doi.org/10.3390/electronics10080979
Azzaoui N, Korichi A, Brik B, Fekair MeA. Towards Optimal Dissemination of Emergency Messages in Internet of Vehicles: A Dynamic Clustering-Based Approach. Electronics. 2021; 10(8):979. https://doi.org/10.3390/electronics10080979
Chicago/Turabian StyleAzzaoui, Nadjet, Ahmed Korichi, Bouziane Brik, and Med el Amine Fekair. 2021. "Towards Optimal Dissemination of Emergency Messages in Internet of Vehicles: A Dynamic Clustering-Based Approach" Electronics 10, no. 8: 979. https://doi.org/10.3390/electronics10080979