
Modeling Small UAV Micro-Doppler Signature Using Millimeter-Wave FMCW Radar


Abstract
:1. Introduction
2. Compact Model for Flying UAVs
2.1. FMCW Radar and Micro-Doppler Generality
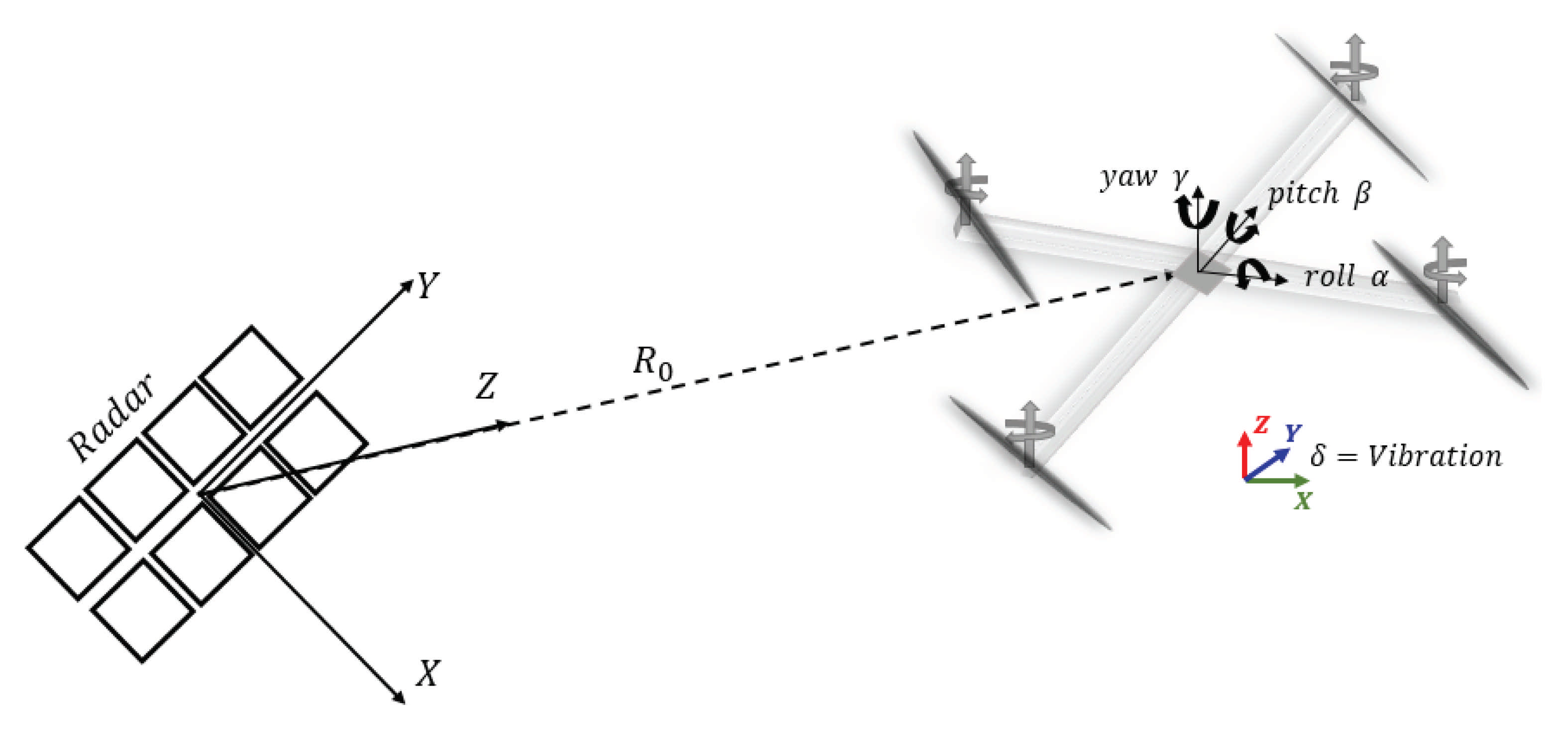
2.2. Micro-Doppler Vibrational Spectral Model of a Flying UAV
3. Experimental Validation of Micro-Doppler Model for Multi-Motor UAV
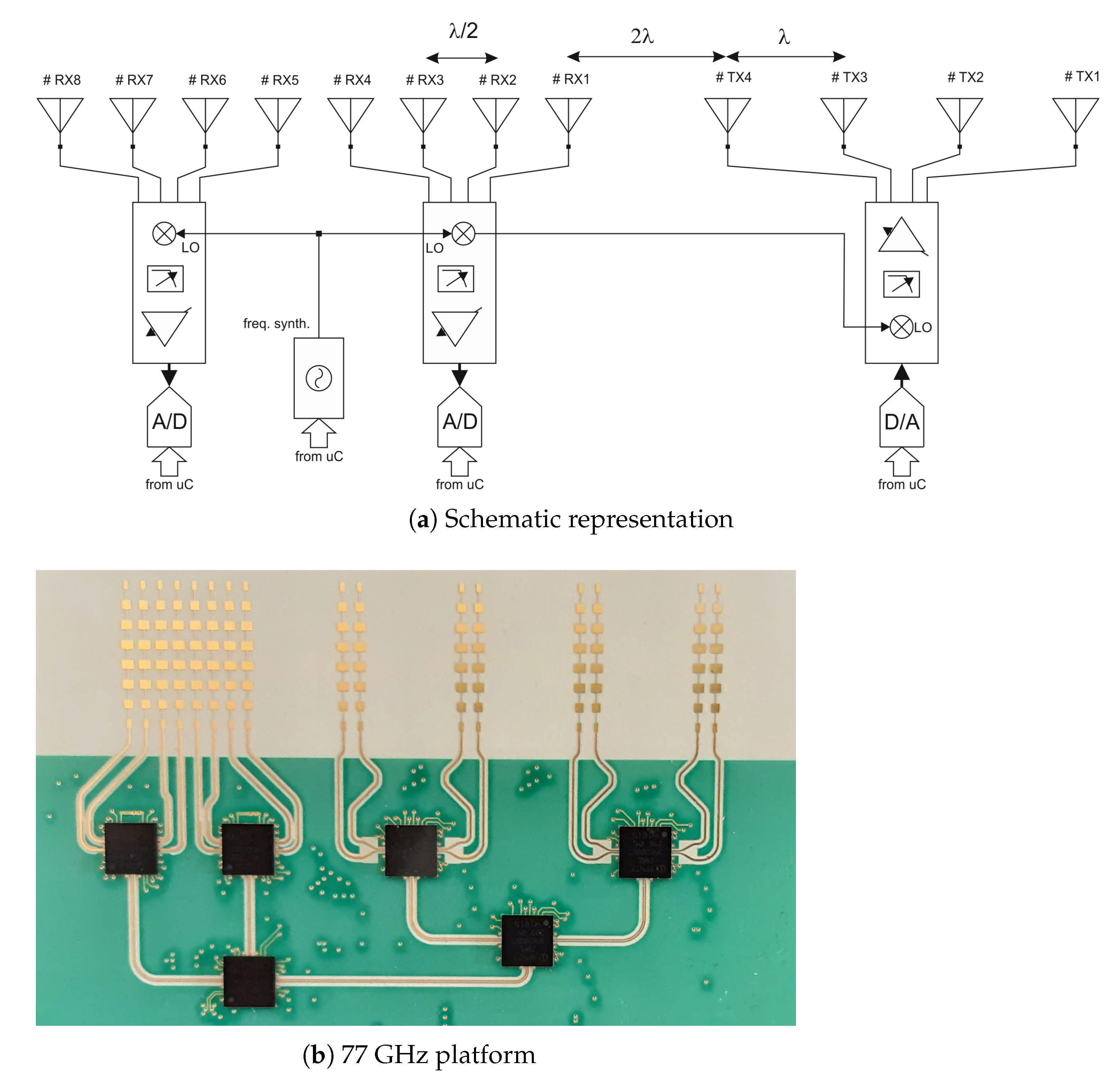
3.1. Experimental FMCW Radar Measurement Set-Up
3.2. Micro-Doppler Model Validation
3.3. UAV Classification on the Basis of the Micro-Doppler Model
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, H.; Mokdad, L.; Ben-Othman, J. Designing UAV surveillance frameworks for smart city and extensive ocean with differential perspectives. IEEE Commun. Mag. 2018, 56, 98–104. [Google Scholar] [CrossRef]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.A. Monitoring road traffic with a UAV-based system. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned aerial systems for civil applications: A review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- Paszkiel, S.; Sikora, M. The Use of Brain-Computer Interface to Control Unmanned Aerial Vehicle. In Automation 2019; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 583–598. [Google Scholar]
- Shin, J.I.; Seo, W.W.; Kim, T.; Park, J.; Woo, C.S. Using UAV multispectral images for classification of forest burn severity—A case study of the 2019 Gangneung forest fire. Forests 2019, 10, 1025. [Google Scholar] [CrossRef] [Green Version]
- Yaacoub, J.P.; Salman, O. Security Analysis of Drones Systems: Attacks, Limitations, and Recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Rojhani, N.; Passafiume, M.; Lucarelli, M.; Collodi, G.; Cidronali, A. Exploiting Compressive Sensing Basis Selection to Improve 2 × 2 MIMO Radar Image. In Proceedings of the 2020 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Linz, Austria, 23–23 November 2020. [Google Scholar] [CrossRef]
- Premachandra, C.; Ueda, D.; Kato, K. Speed-up automatic quadcopter position detection by sensing propeller rotation. IEEE Sens. J. 2018, 19, 2758–2766. [Google Scholar] [CrossRef]
- Opromolla, R.; Fasano, G.; Accardo, D. A Vision-Based Approach to UAV Detection and Tracking in Cooperative Applications. Sensors 2018, 18, 3391. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Christnacher, F.; Hengy, S.; Laurenzis, M.; Matwyschuk, A.; Naz, P.; Schertzer, S.; Schmitt, G. Optical and acoustical UAV detection. In Electro-Optical Remote Sensing X; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; Volume 9988, p. 99880B. [Google Scholar]
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Zhao, F.; Liu, X.; Xu, Z.; Liu, Y.; Ai, X. Micro-Motion Feature Extraction of a Rotating Target Based on Interrupted Transmitting and Receiving Pulse Signal in an Anechoic Chamber. Electronics 2019, 8, 1028. [Google Scholar] [CrossRef] [Green Version]
- Thayaparan, T.; Abrol, S.; Riseborough, E. Micro-Doppler Radar Signatures for Intelligent Target Recognition; Technical Report; Defence Research and Development Canada: Ottawa, ON, Canada, 2004. [Google Scholar]
- Chen, V.C.; Ling, H. Time-Frequency Transforms for Radar Imaging and Signal Analysis; Artech House: Boston, MA, USA, 2002. [Google Scholar]
- Ye, L.; Lan, S.; Zhang, K.; Zhang, G. EM-Sign: A Non-Contact Recognition Method Based on 24 GHz Doppler Radar for Continuous Signs and Dialogues. Electronics 2020, 9, 1577. [Google Scholar] [CrossRef]
- Du, L.; Wang, B.; Li, Y.; Liu, H. Robust classification scheme for airplane targets with low resolution radar based on EMD-CLEAN feature extraction method. IEEE Sens. J. 2013, 13, 4648–4662. [Google Scholar] [CrossRef]
- Molchanov, P.; Egiazarian, K.; Astola, J.; Totsky, A.; Leshchenko, S.; Jarabo-Amores, M.P. Classification of aircraft using micro-Doppler bicoherence-based features. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1455–1467. [Google Scholar] [CrossRef]
- Ma, X.; Oh, B.S.; Sun, L.; Toh, K.A.; Lin, Z. EMD-based Entropy Features for micro-Doppler mini-UAV classification. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1295–1300. [Google Scholar]
- Oh, B.S.; Guo, X.; Lin, Z. A UAV classification system based on FMCW radar micro-Doppler signature analysis. Expert Syst. Appl. 2019, 132, 239–255. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Micro-UAV detection and classification from RF fingerprints using machine learning techniques. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–13. [Google Scholar]
- Kim, B.K.; Kang, H.S.; Park, S.O. Drone classification using convolutional neural networks with merged Doppler images. IEEE Geosci. Remote. Sens. Lett. 2016, 14, 38–42. [Google Scholar] [CrossRef]
- Mendis, G.J.; Randeny, T.; Wei, J.; Madanayake, A. Deep learning based doppler radar for micro UAS detection and classification. In Proceedings of the MILCOM 2016-2016 IEEE Military Communications Conference, Baltimore, MD, USA, 1–3 November 2016; pp. 924–929. [Google Scholar]
- Park, D.; Lee, S.; Park, S.; Kwak, N. Radar-Spectrogram-Based UAV Classification Using Convolutional Neural Networks. Sensors 2021, 21, 210. [Google Scholar] [CrossRef] [PubMed]
- Taha, B.; Shoufan, A. Machine learning-based drone detection and classification: State-of-the-art in research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Cidronali, A.; Passafiume, M.; Colantonio, P.; Collodi, G.; Florian, C.; Leuzzi, G.; Pirola, M.; Ramella, C.; Santarelli, A.; Traverso, P. System level analysis of millimetre-wave gan-based mimo radar for detection of micro unmanned aerial vehicles. In Proceedings of the 2019 PhotonIcs & Electromagnetics Research Symposium-Spring (PIERS-Spring), Rome, Italy, 17–20 June 2019; pp. 438–450. [Google Scholar]
- Molchanov, P.; Harmanny, R.I.; de Wit, J.J.; Egiazarian, K.; Astola, J. Classification of small UAVs and birds by micro-Doppler signatures. Int. J. Microw. Wirel. Technol. 2014, 6, 435–444. [Google Scholar] [CrossRef] [Green Version]
- Herrmann, R.; Moortgat-Pick, A.; Marx, S. Vibration Analysis of Structures using a Drone (UAV) based Mobile Sensing Platform. In Proceedings of the 5th International Conference on Smart Monitoring, Assessment and Rehabilitation of Civil Structures, Potsdam, Germany, 27–29 August 2019; pp. 1–8. [Google Scholar]
- Rojhani, N.; Passafiume, M.; Lucarelli, M.; Collodi, G.; Cidronali, A. Assessment of Compressive Sensing 2 × 2 MIMO Antenna Design for Millimeter-Wave Radar Image Enhancement. Electronics 2020, 9, 624. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Amplitude | Frequency | Phase | Amplitude | Frequency | Phase | Amplitude | Frequency | Phase | Amplitude | Freq | Phase | ||
| single motor | |||||||||||||
| half speed | |||||||||||||
| motor 1 | 0.044 | 1.04 | 0.81 | 1.90 | |||||||||
| quad motor | |||||||||||||
| half speed | |||||||||||||
| motor 1 | 0.001 | 1.04 | 1.24 | ||||||||||
| motor 2 | 0.007 | 0.12 | −2.01 | ||||||||||
| motor 3 | 0.001 | 0.13 | 2.17 | ||||||||||
| motor 4 | 0.004 | 0.16 | 1.60 | 1.77 | 1.59 | ||||||||
| quad motor | |||||||||||||
| max speed | |||||||||||||
| motor 1 | 0.001 | 3.88 | |||||||||||
| motor 2 | 0.003 | 1.06 | 1.93 | ||||||||||
| motor 3 | 0.001 | 1.52 | 3.35 | 4.31 | |||||||||
| motor 4 | 0.011 | 0.68 | |||||||||||
| Measures | Reference Models (Best GA Fits for Class) | |||||||
|---|---|---|---|---|---|---|---|---|
| Single Motor | Single Motor | Quad Motor | Quad Motor | |||||
| Orthogonal View | Longitudinal view | Bottom View | Top View | |||||
| Single Motor | ||||||||
| Vertical View | ||||||||
| 66.38 | 3.10 | 14.37 | 14.08 | 0.96 | 0.96 | 0.11 | 0.05 | |
| 22.29 | 1.38 | 23.93 | 49.20 | 1.03 | 1.93 | 0.15 | 0.08 | |
| 6.37 | 82.90 | 5.12 | 2.72 | 1.53 | 1.04 | 0.24 | 0.08 | |
| 1.52 | 95.69 | 1.06 | 0.60 | 0.78 | 0.27 | 0.07 | 0.02 | |
| Single Motor | ||||||||
| Horizontal View | ||||||||
| 17.64 | 8.98 | 41.50 | 19.25 | 6.74 | 4.00 | 1.30 | 0.60 | |
| 5.66 | 2.87 | 22.02 | 43.28 | 2.08 | 23.27 | 0.62 | 0.20 | |
| 6.91 | 1.35 | 61.99 | 27.43 | 1.08 | 1.08 | 0.12 | 0.05 | |
| 19.85 | 4.40 | 46.17 | 23.34 | 2.71 | 2.56 | 0.64 | 0.32 | |
| 17.30 | 7.23 | 43.04 | 23.46 | 4.09 | 3.58 | 0.90 | 0.41 | |
| 5.81 | 2.08 | 28.94 | 49.10 | 1.51 | 11.99 | 0.41 | 0.15 | |
| 3.41 | 1.21 | 42.62 | 48.44 | 1.18 | 2.86 | 0.19 | 0.07 | |
| 17.10 | 2.95 | 38.34 | 35.25 | 1.74 | 3.62 | 0.65 | 0.35 | |
| Quad Motor | ||||||||
| Bottom View | ||||||||
| 7.34 | 2.63 | 6.09 | 6.95 | 33.02 | 43.71 | 0.11 | 0.14 | |
| 6.66 | 2.17 | 4.14 | 3.89 | 34.75 | 48.21 | 0.08 | 0.11 | |
| 3.71 | 2.76 | 16.29 | 11.23 | 44.82 | 21.03 | 0.08 | 0.08 | |
| 6.27 | 1.84 | 4.56 | 3.12 | 34.15 | 49.97 | 0.04 | 0.06 | |
| 13.65 | 5.21 | 3.81 | 3.22 | 15.25 | 58.72 | 0.06 | 0.08 | |
| 4.57 | 1.90 | 10.14 | 5.82 | 46.08 | 31.40 | 0.04 | 0.05 | |
| 3.59 | 3.03 | 14.34 | 14.48 | 44.29 | 20.08 | 0.09 | 0.10 | |
| 6.27 | 1.84 | 4.56 | 3.12 | 34.15 | 49.97 | 0.04 | 0.06 | |
| 21.05 | 5.35 | 8.46 | 8.28 | 24.35 | 32.06 | 0.18 | 0.26 | |
| Quad Motor | ||||||||
| Top View | ||||||||
| 0.04 | 0.04 | 0.05 | 0.07 | 0.06 | 0.06 | 96.48 | 3.21 | |
| 0.04 | 0.04 | 0.05 | 0.08 | 0.06 | 0.07 | 96.16 | 3.51 | |
| 0.02 | 0.02 | 0.03 | 0.04 | 0.03 | 0.03 | 98.45 | 1.37 | |
| 0.09 | 0.07 | 0.10 | 0.15 | 0.12 | 0.13 | 93.56 | 5.79 | |
| 0.14 | 0.10 | 0.15 | 0.21 | 0.22 | 0.23 | 65.84 | 33.11 | |
| 0.25 | 0.17 | 0.27 | 0.35 | 0.37 | 0.40 | 30.01 | 68.20 | |
| 0.11 | 0.08 | 0.11 | 0.16 | 0.16 | 0.18 | 82.11 | 17.08 | |
| 0.09 | 0.06 | 0.09 | 0.12 | 0.11 | 0.13 | 4.49 | 94.91 | |
| 0.38 | 0.24 | 0.40 | 0.50 | 0.55 | 0.59 | 8.15 | 89.18 | |
| Measures | Reference Models (Best GA Fits for Class) | |||
|---|---|---|---|---|
| Single Motor | Single Motor | Quad Motor | Quad Motor | |
| Orthogonal View | Longitudinal View | Bottom View | Top View | |
| Single Motor | ||||
| Vertical View | ||||
| 69.47 | 28.44 | 1.92 | 0.17 | |
| 23.67 | 73.13 | 2.96 | 0.23 | |
| 89.27 | 7.84 | 2.57 | 0.32 | |
| 97.21 | 1.66 | 1.04 | 0.09 | |
| Single Motor | ||||
| Horizontal View | ||||
| 26.62 | 60.74 | 10.73 | 1.90 | |
| 8.54 | 65.29 | 25.34 | 0.83 | |
| 8.26 | 89.42 | 2.16 | 0.16 | |
| 24.25 | 69.51 | 5.27 | 0.97 | |
| 24.53 | 66.50 | 7.66 | 1.31 | |
| 7.90 | 78.04 | 13.51 | 0.56 | |
| 4.63 | 91.07 | 4.04 | 0.26 | |
| 20.04 | 73.58 | 5.37 | 1.01 | |
| Quad Motor | ||||
| Bottom View | ||||
| 9.97 | 13.04 | 76.73 | 0.26 | |
| 8.83 | 8.03 | 82.96 | 0.19 | |
| 6.47 | 27.51 | 65.85 | 0.16 | |
| 8.11 | 7.68 | 84.12 | 0.10 | |
| 18.86 | 7.04 | 73.96 | 0.14 | |
| 6.47 | 15.96 | 77.49 | 0.08 | |
| 6.62 | 28.82 | 64.37 | 0.19 | |
| 8.11 | 7.68 | 84.12 | 0.10 | |
| 26.41 | 16.74 | 56.41 | 0.44 | |
| Quad Motor | ||||
| Top View | ||||
| 0.07 | 0.12 | 0.12 | 99.69 | |
| 0.08 | 0.13 | 0.13 | 99.66 | |
| 0.04 | 0.06 | 0.07 | 99.83 | |
| 0.15 | 0.25 | 0.25 | 99.35 | |
| 0.24 | 0.36 | 0.45 | 98.95 | |
| 0.41 | 0.61 | 0.77 | 98.21 | |
| 0.18 | 0.28 | 0.34 | 99.20 | |
| 0.15 | 0.21 | 0.24 | 99.40 | |
| 0.63 | 0.90 | 1.14 | 97.33 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Passafiume, M.; Rojhani, N.; Collodi, G.; Cidronali, A. Modeling Small UAV Micro-Doppler Signature Using Millimeter-Wave FMCW Radar. Electronics 2021, 10, 747. https://doi.org/10.3390/electronics10060747
Passafiume M, Rojhani N, Collodi G, Cidronali A. Modeling Small UAV Micro-Doppler Signature Using Millimeter-Wave FMCW Radar. Electronics. 2021; 10(6):747. https://doi.org/10.3390/electronics10060747
Chicago/Turabian StylePassafiume, Marco, Neda Rojhani, Giovanni Collodi, and Alessandro Cidronali. 2021. "Modeling Small UAV Micro-Doppler Signature Using Millimeter-Wave FMCW Radar" Electronics 10, no. 6: 747. https://doi.org/10.3390/electronics10060747