
Discrete Time Domain Modeling and Control of a Grid-Connected Four-Wire Split-Link Converter




Abstract
:1. Introduction
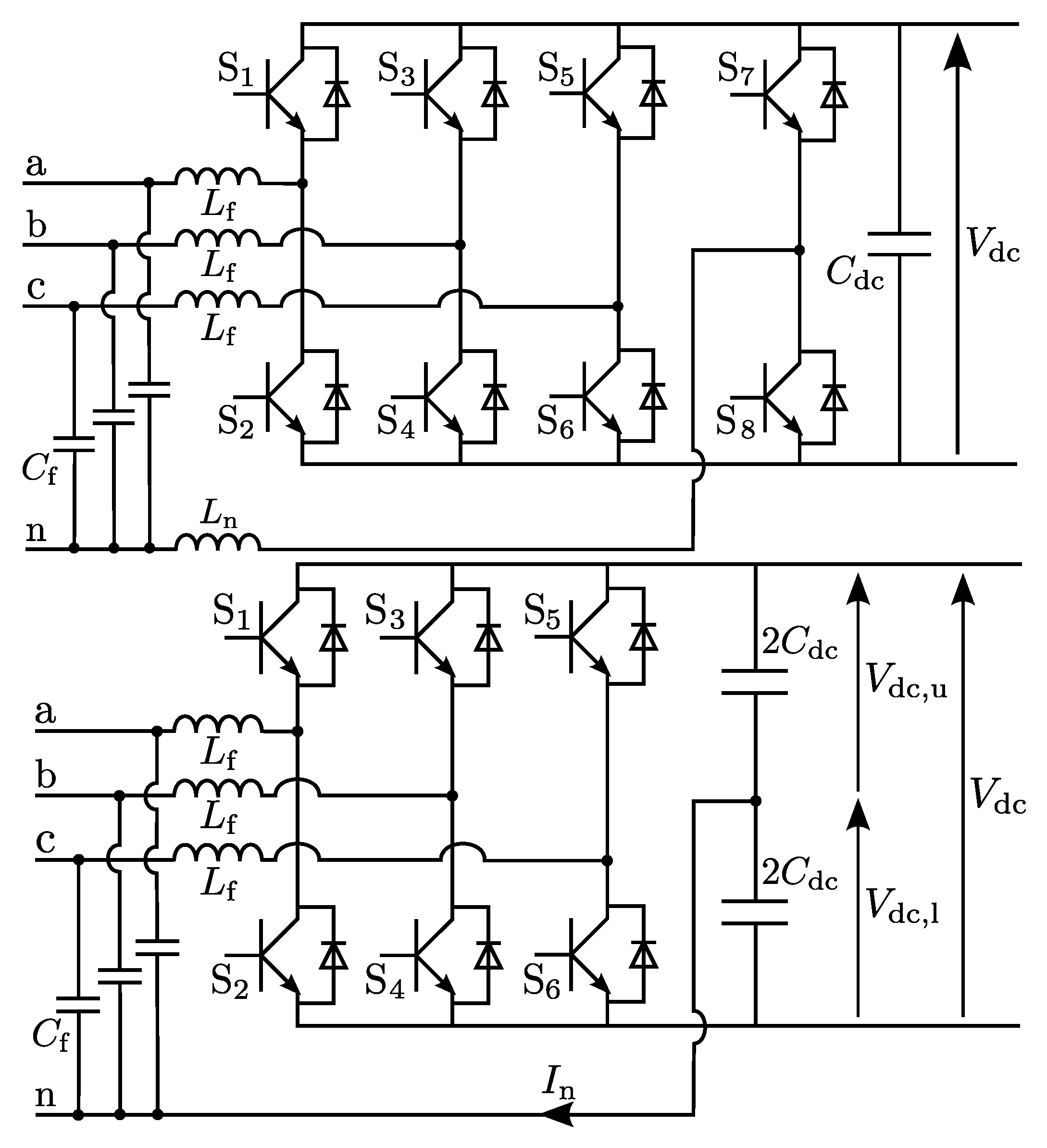
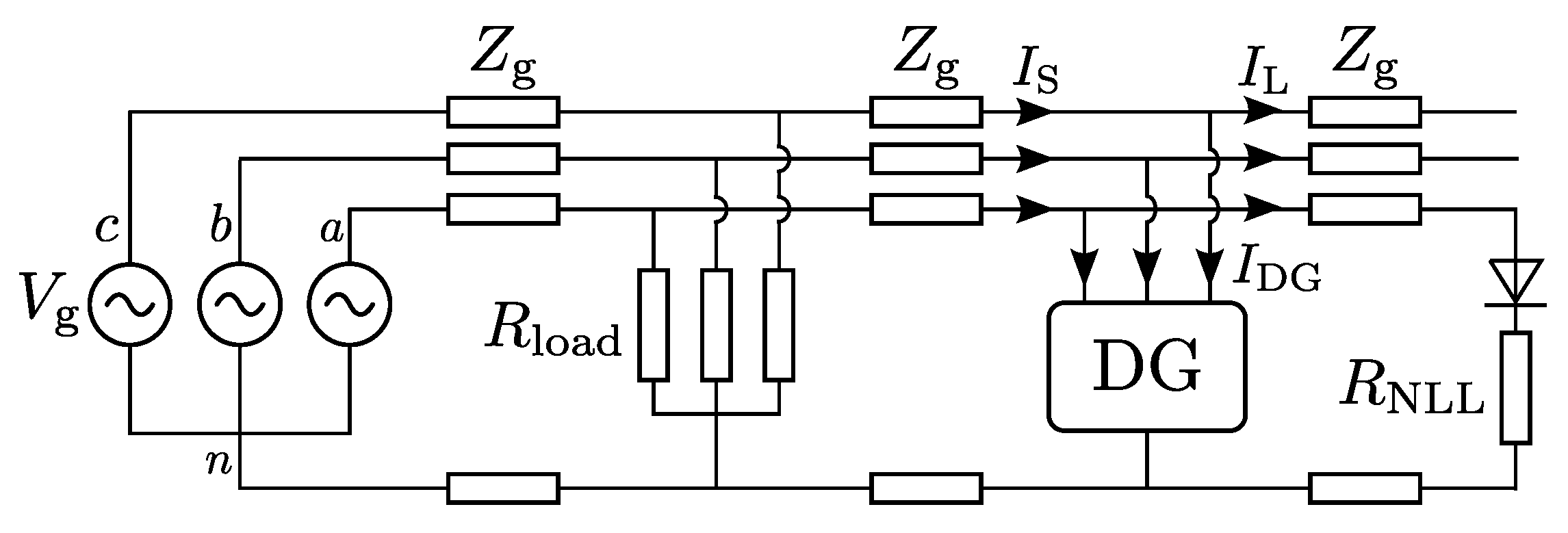
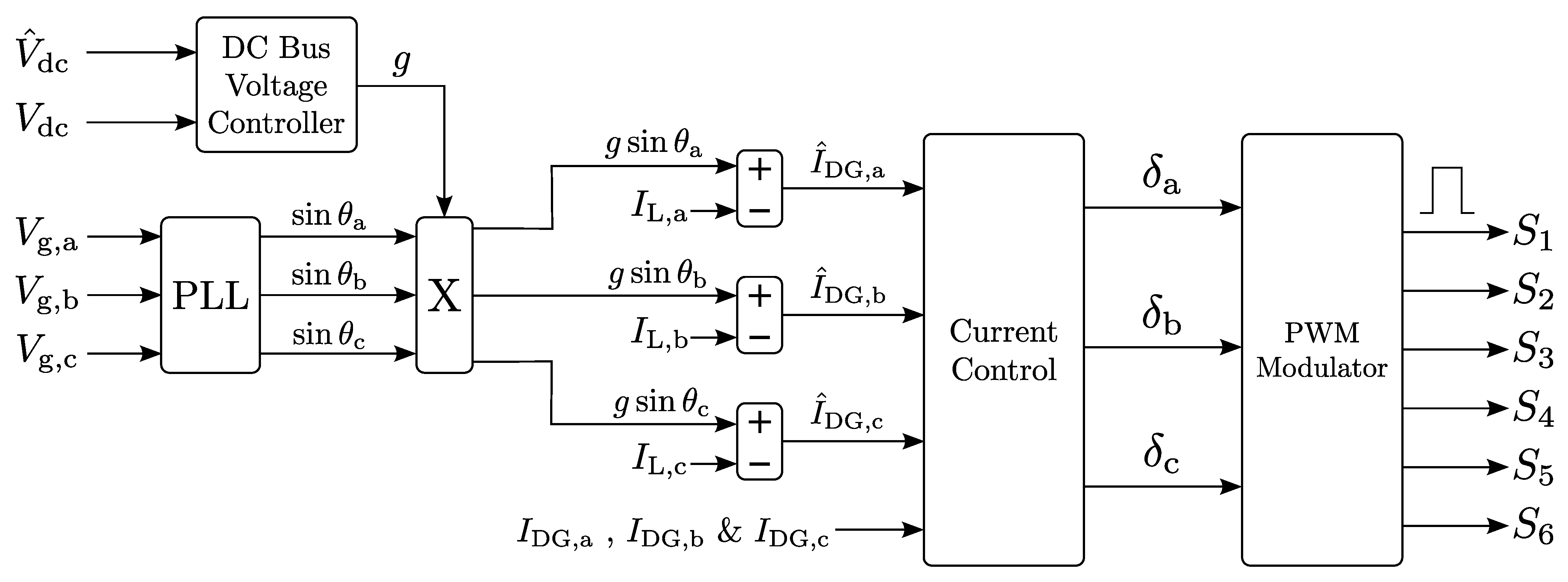
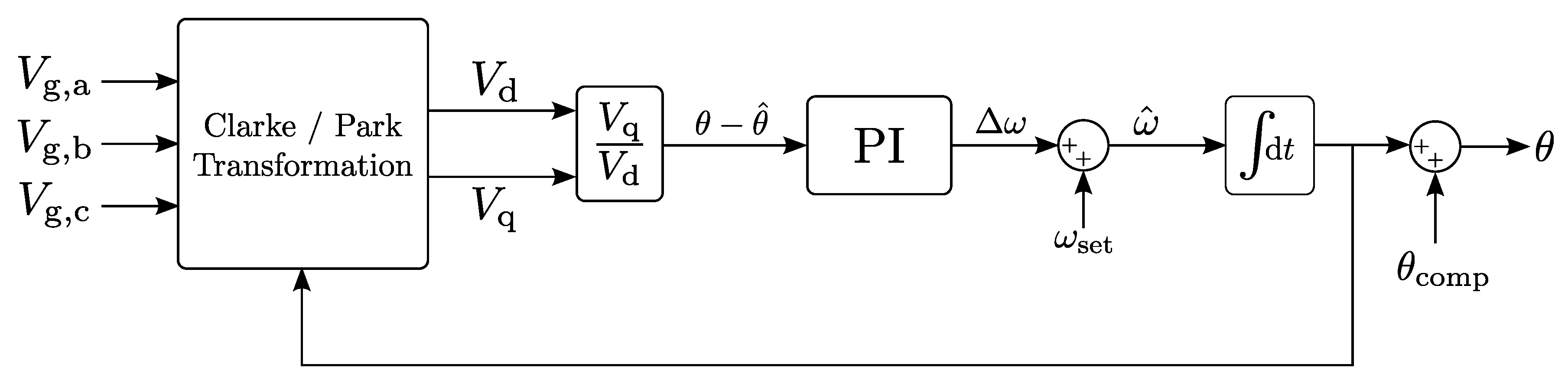
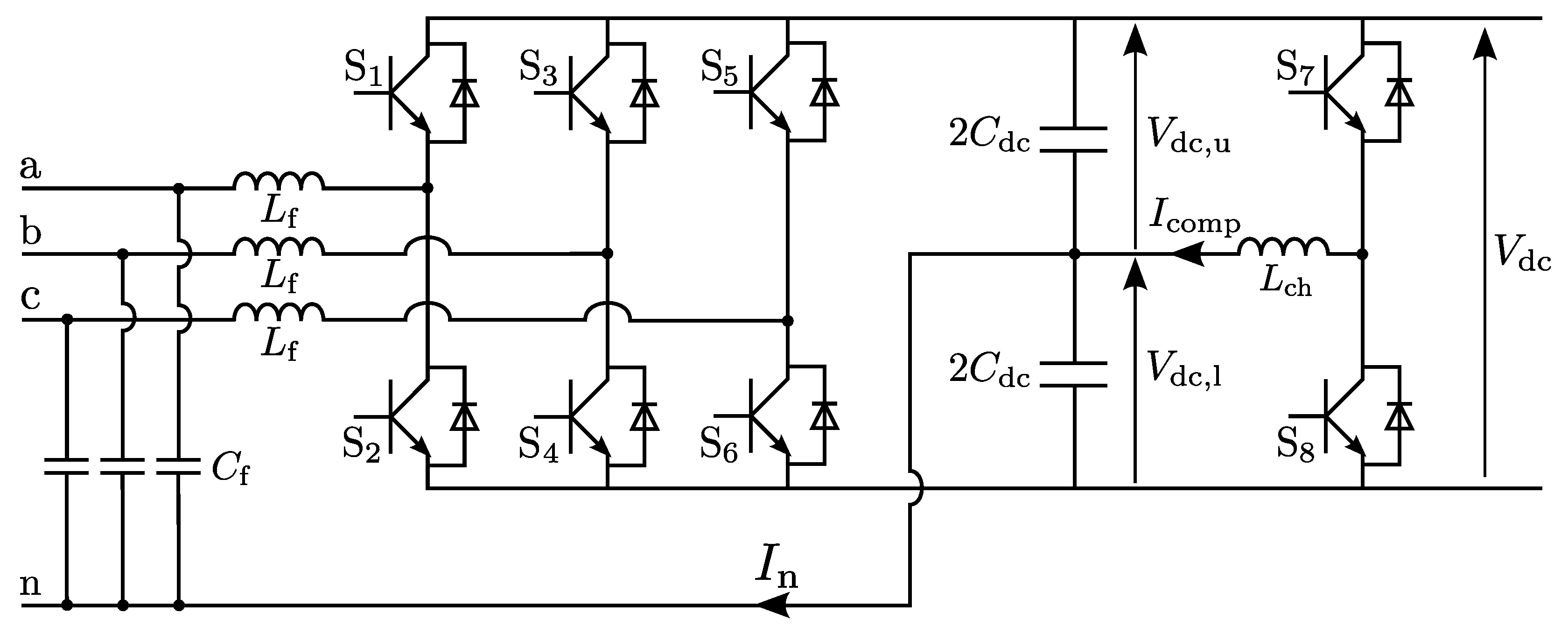
2. Split-Link Converter Topology and Control
2.1. Problem Statement
- Unequal leakage currents of the capacitors
- Unequal capacitor values
- Unequal time delays during switching
- Asymmetrical charging during transients
- Current measurement errors
2.2. Origin of Neutral-Wire Currents
2.3. Mid-Point Balancing Techniques
3. Zero-Sequence Current Injection
3.1. Description of the Technique
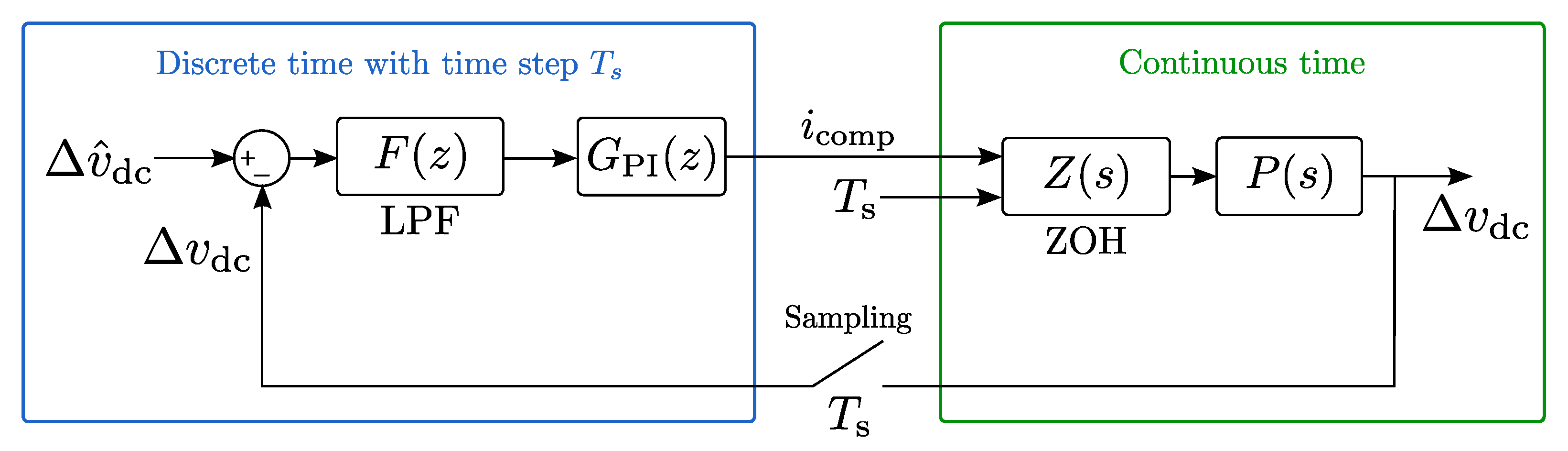
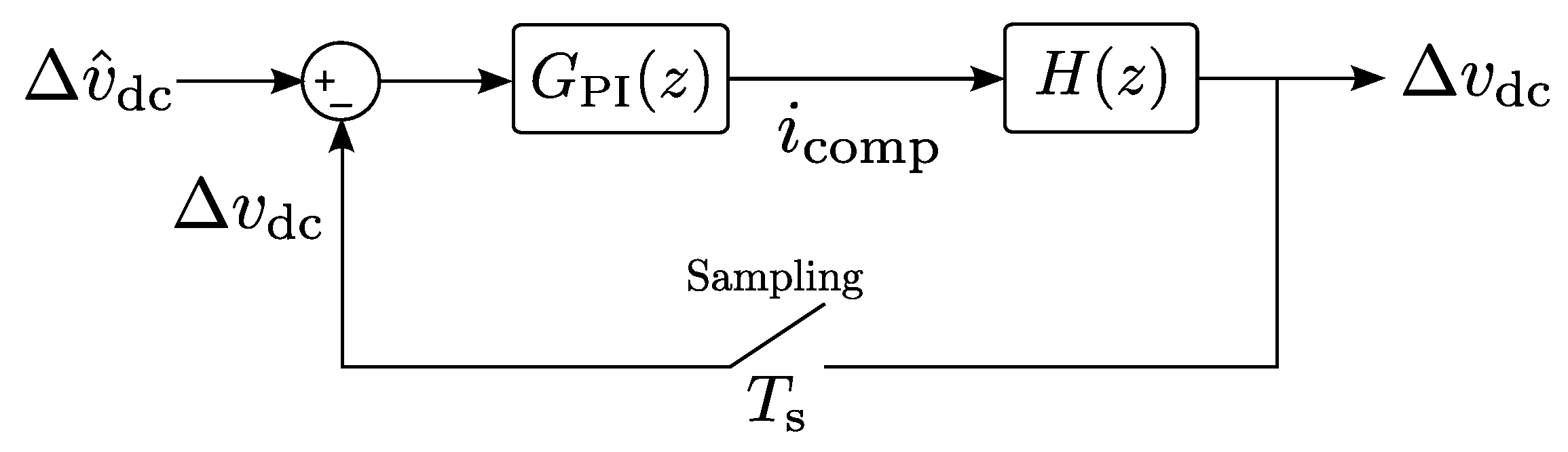
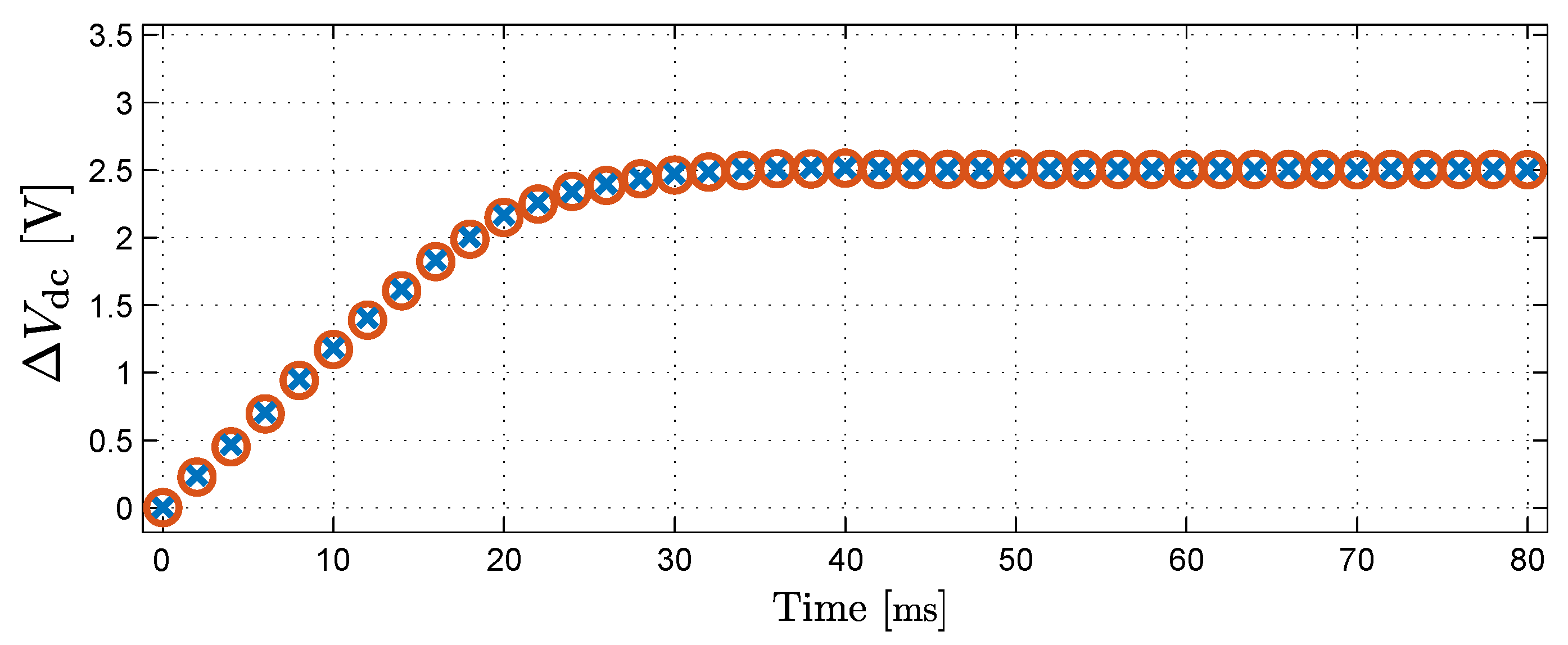
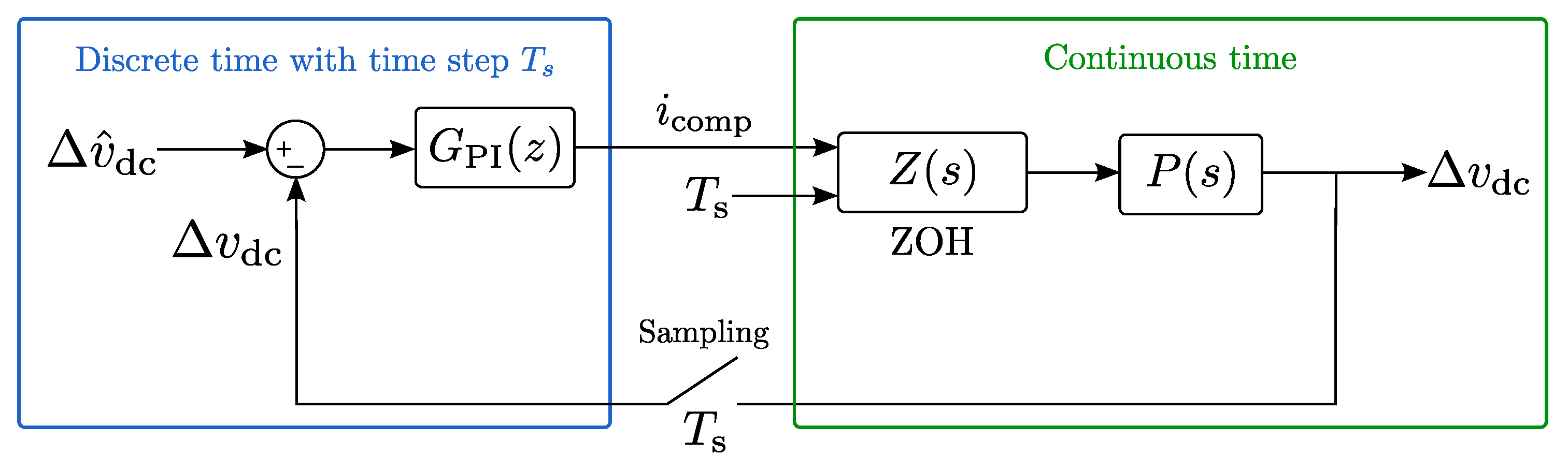
3.2. Discrete Time Domain Modeling
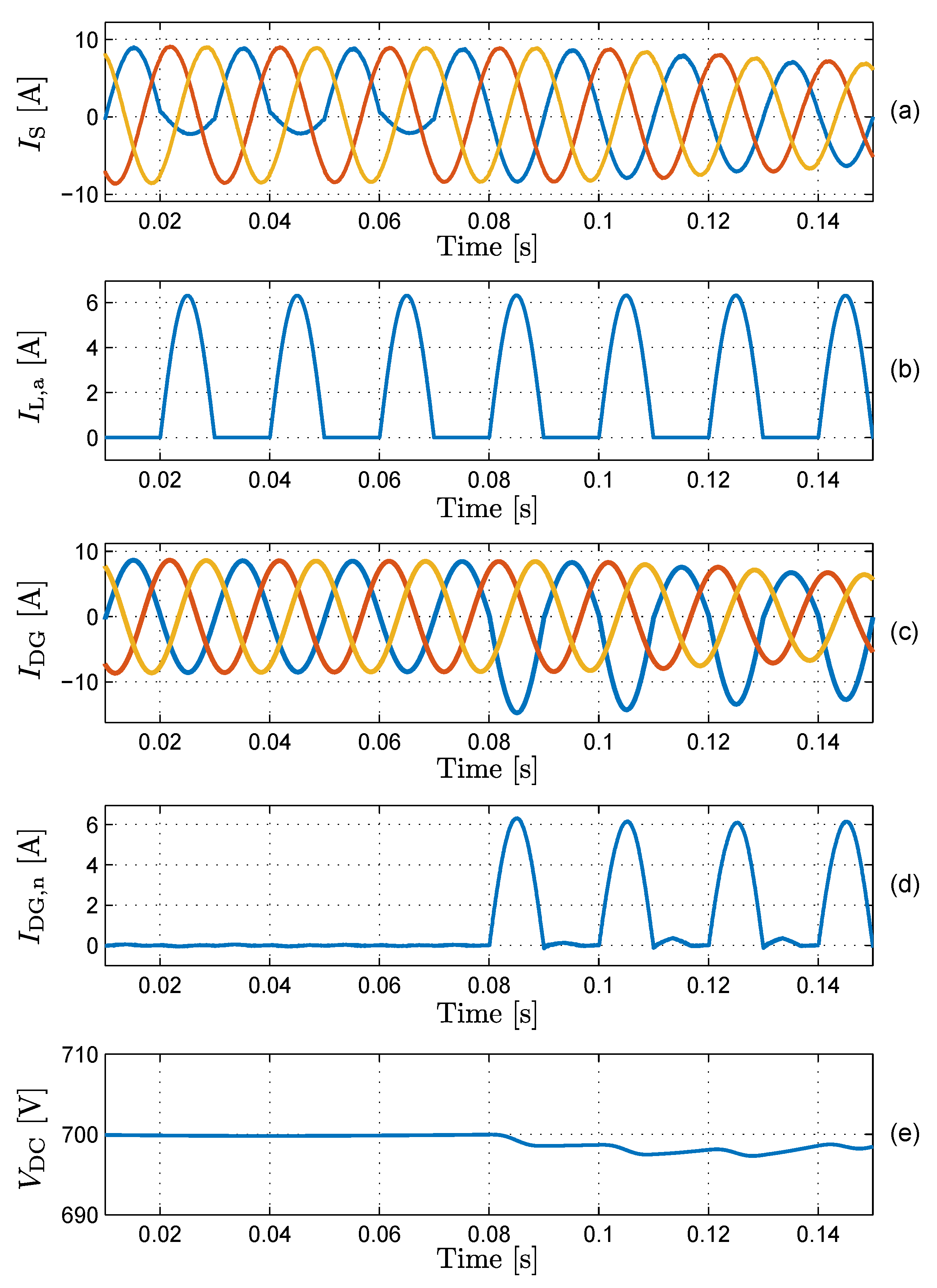
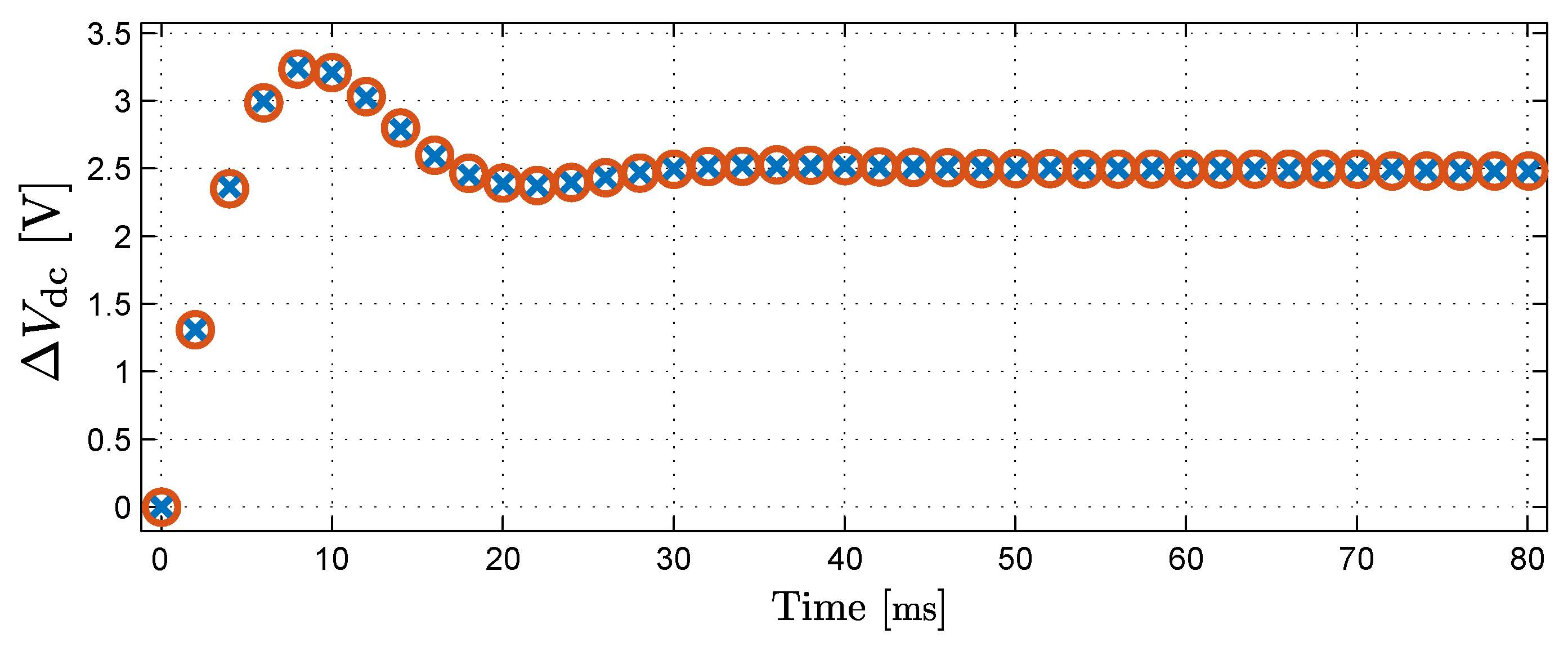
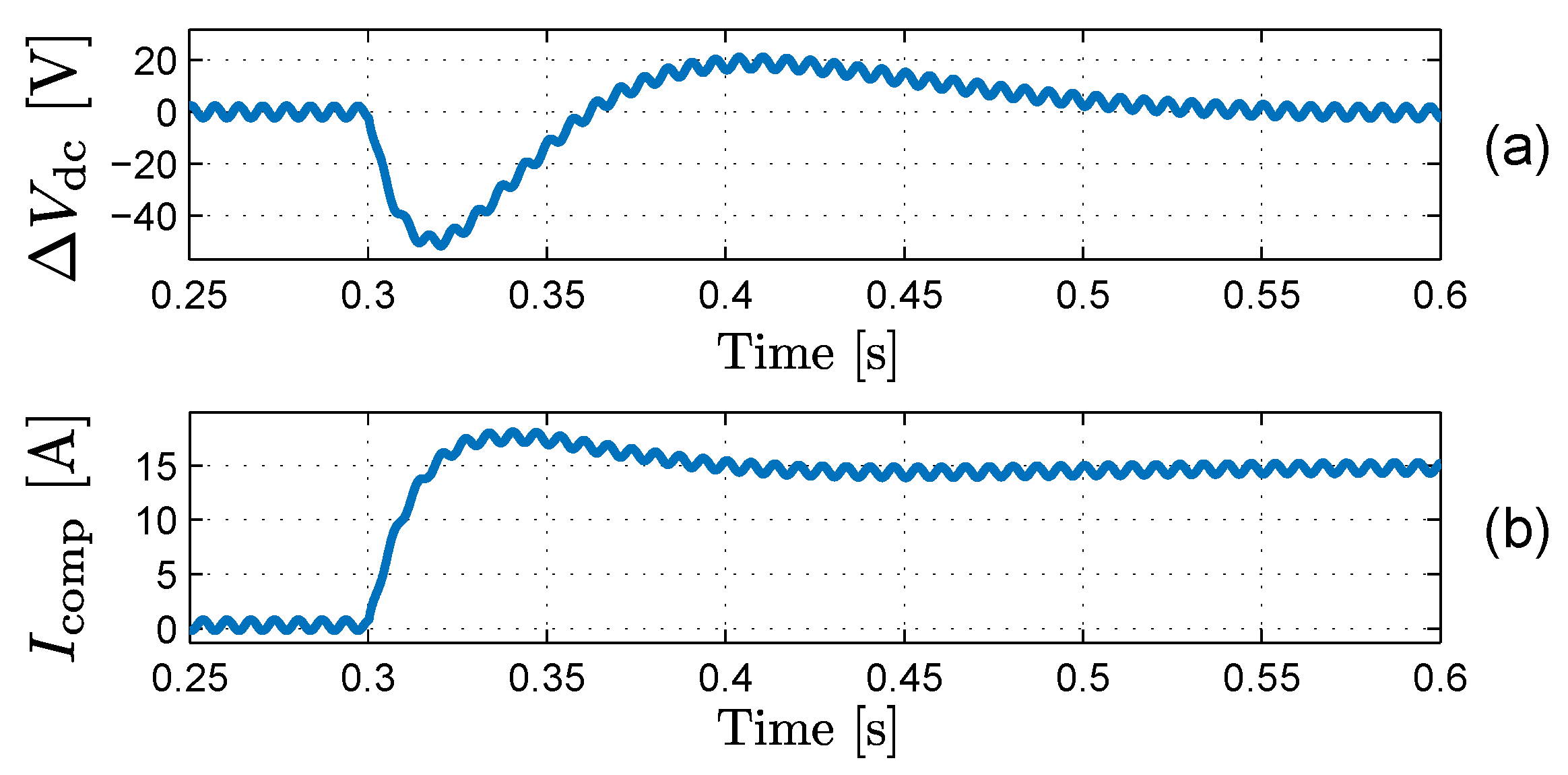
3.3. Simulation Results
4. Half-Bridge Chopper
4.1. Description of the Technique
4.2. Discrete Time Domain Modeling
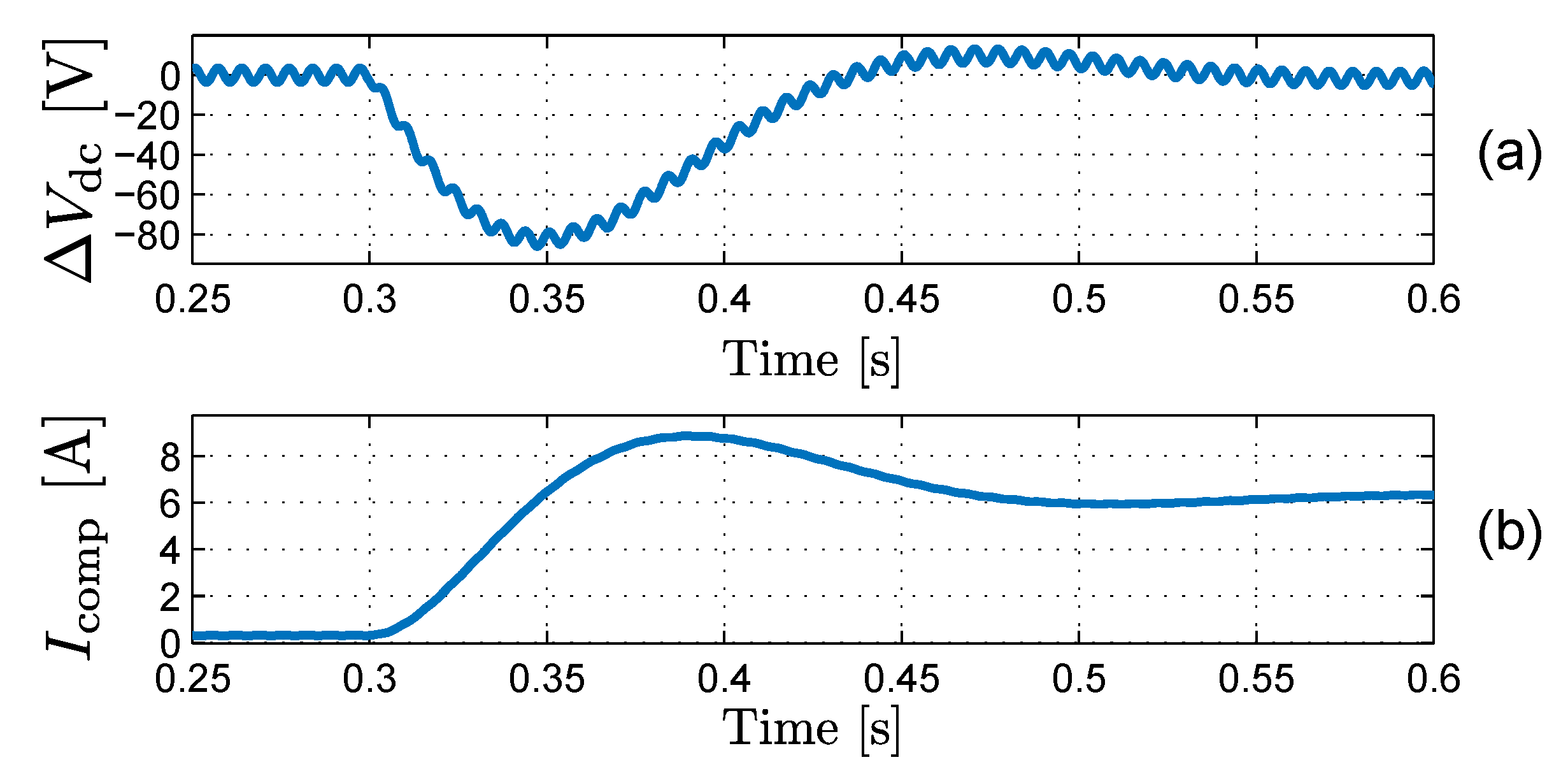
4.3. Simulation Results
5. Experimental Validation
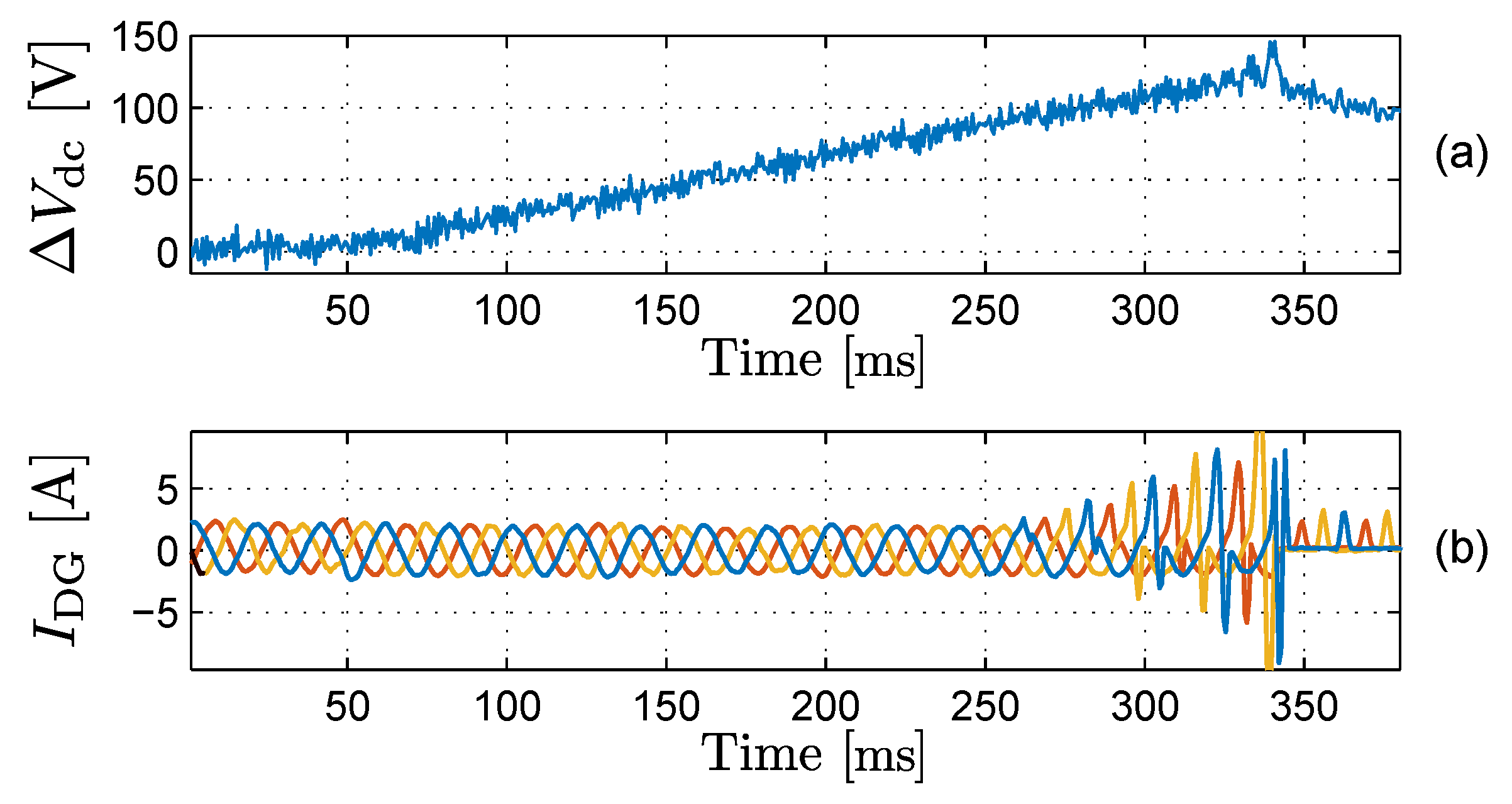
5.1. No Mid-Point Control
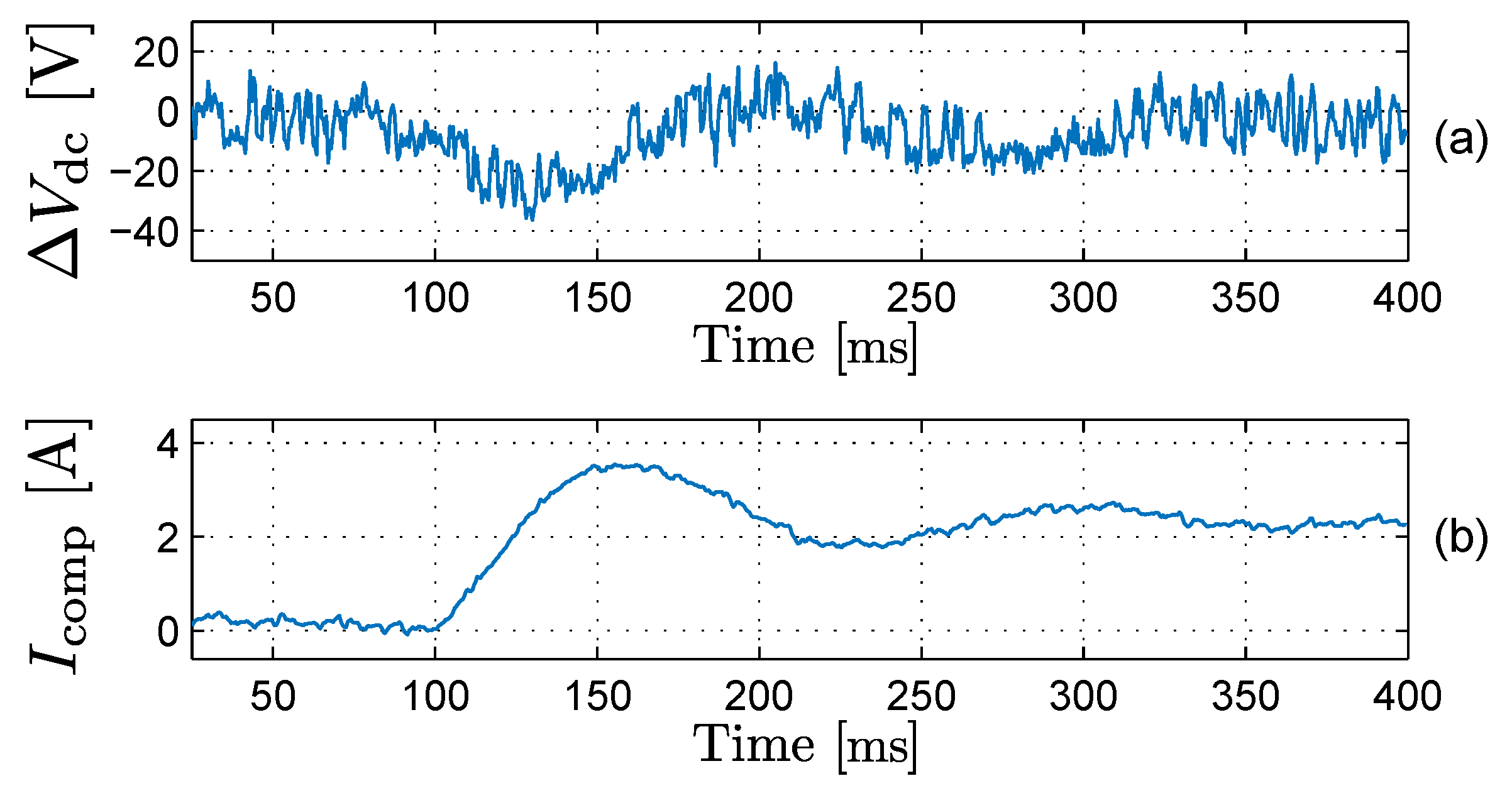
5.2. Zero-Sequence Current Injection
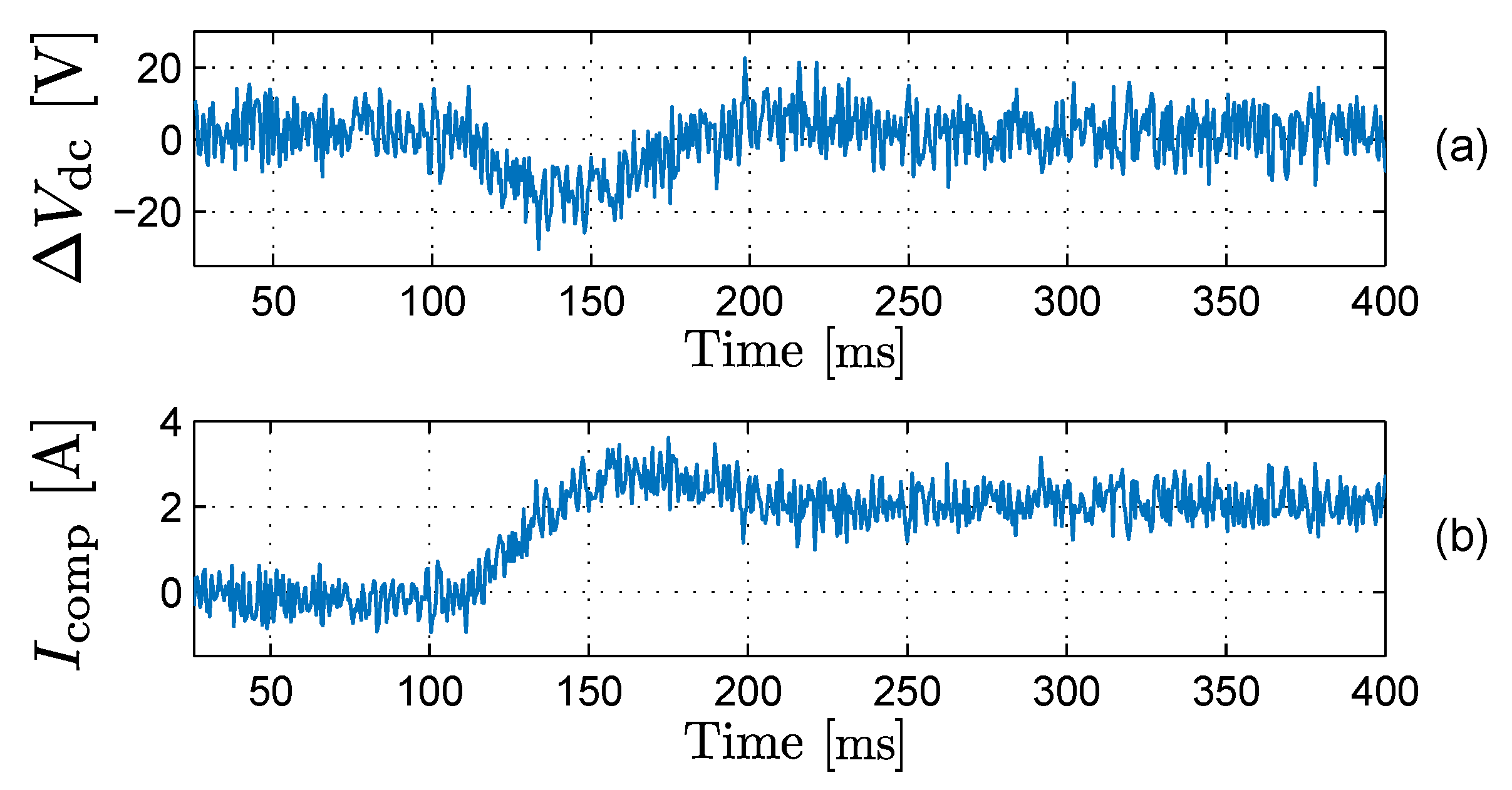
5.3. Half-Bridge Chopper
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- The International Renewable Energy Agency (IRENA). Renewable Energy Statistics; IRENA: Abu Dhabi, United Arab Emirates, 2020. [Google Scholar]
- Bozalakov, D.; Laveyne, J.; Mnati, M.J.; Van de Vyver, J.; Vandevelde, L. Possible power quality ancillary services in low voltage grids provided by the three-phase damping control strategy. Appl. Sci. 2020, 10, 7876. [Google Scholar] [CrossRef]
- Alotaibi, I.; Abido, M.A.; Khalid, M.; Savkin, A.V. A Comprehensive Review of Recent Advances in Smart Grids: A Sustainable Future with Renewable Energy Resources. Energies 2020, 13, 6269. [Google Scholar] [CrossRef]
- Bozalakov, D.; Vandoorn, T.; Meersman, B.; Papagiannis, G.; Chrysochos, A.; Vandevelde, L. Damping-based droop control strategy allowing an increased penetration of renewable energy resources in low voltage grids. IEEE Trans. Power Deliv. 2016, 31, 1447–1455. [Google Scholar] [CrossRef]
- Chaoui, A.; Gaubert, J.P.; Krim, F.; Champenois, G. PI controlled three-phase shunt active power filter for power quality improvement. Electr. Power Components Syst. 2007, 35, 1331–1344. [Google Scholar] [CrossRef]
- Bozalakov, D.; Laveyne, J.; Desmet, J.; Vandevelde, L. Overvoltage and voltage unbalance mitigation in areas with high penetration of renewable energy resources by using the modified three-phase damping control strategy. Electr. Power Syst. Res. 2019, 168, 283–294. [Google Scholar] [CrossRef]
- Sun, X.; Han, R.; Shen, H.; Wang, B.; Lu, Z.; Chen, Z. A double-resistive active power filter system to attenuate harmonic voltages of a radial power distribution feeder. IEEE Trans. Power Electron. 2016, 31, 6203–6216. [Google Scholar] [CrossRef]
- Manandhar, U.; Zhang, X.; Gooi, H.B.; Wang, B.; Fan, F. Active DC-link balancing and voltage regulation using a three-level converter for split-link four-wire system. IET Power Electron. 2020, 13, 2424–2431. [Google Scholar] [CrossRef]
- De Kooning, J.D.M.; Meersman, B.; Vandoorn, T.; Renders, B.; Vandevelde, L. Comparison of three-phase four-wire converters for distributed generation. In Proceedings of the International Universities Power Engineering Conference (UPEC2010), Cardiff, UK, 31 August–3 September 2010. [Google Scholar]
- Liang, J.; Green, T.C.; Feng, C.; Weiss, G. Increasing Voltage Utilization in Split-Link, Four-Wire Inverters. IEEE Trans. Power Electron. 2009, 24, 1562–1569. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.C. Three-Dimensional Space Vector Modulation for Four-Leg Voltage-Source Converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Bifaretti, S.; Lidozzi, A.; Solero, L.; Crescimbini, F. Modulation with sinusoidal third-harmonic injection for active split DC-bus four-leg inverters. IEEE Trans. Power Electron. 2016, 31, 6226–6236. [Google Scholar] [CrossRef]
- Urrea-Quintero, J.-H.; Muñez-Galeano, N.; López-Lezama, J.M. Robust Control of Shunt Active Power Filters: A Dynamical Model-Based Approach with Verified Controllability. Energies 2020, 13, 6253. [Google Scholar] [CrossRef]
- Hammami, M.; Mandrioli, R.; Viatkin, A.; Ricco, M.; Grandi, G. Analysis of Input Voltage Switching Ripple in Three-Phase Four-Wire Split Capacitor PWM Inverters. Energies 2020, 13, 5076. [Google Scholar] [CrossRef]
- Seguí-chilet, S.; Gimeno-sales, F.J.; Orts, S.; Alcañiz, M.; Masot, R. Selective shunt active power compensator in four wire electrical systems using symmetrical components. Electr. Power Components Syst. 2006, 35, 97–118. [Google Scholar] [CrossRef]
- Casaravilla, G.; Eirea, G.; Barbat, G.; Inda, J.; Chiaramello, F. Selective active filtering for four-wire loads: Control and balance of split capacitor voltages. In Proceedings of the PESC 2008: 39th IEEE Annual Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 4636–4642. [Google Scholar]
- Mishra, M.K.; Joshi, A.; Ghosh, A. Control schemes for equalization of capacitor voltages in neutral clamped shunt compensator. IEEE Trans. Power Deliv. 2003, 18, 538–544. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Heydt, G.T.; Chu, R.F. The Power Quality Impact of Cycloconverter Control Strategies. IEEE Trans. Power Deliv. 2005, 20, 1711–1718. [Google Scholar] [CrossRef]
- Salas, V.; Alonso-Abella, M.; Olías, E.; Chenlo, F.; Barrado, A. DC Current Injection into the Network from PV inverters of <5 kW for Low-Voltage Small Grid-Connected PV Systems. Sol. Energy Mater. Sol. Cells 2007, 91, 801–806. [Google Scholar]
- Chung, S.-K. A Phase Tracking System for Three Phase Utility Interface Inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef] [Green Version]
- Renders, B.; Gussemé, K.D.; Ryckaert, W.R.; Vandevelde, L. Converter-connected distributed generation units with integrated harmonic voltage damping and harmonic current compensation function. Electr. Power Syst. Res. 2009, 79, 65–70. [Google Scholar] [CrossRef]
- Green, T.C.; Marks, J.H. Control Techniques for active power filters. IEE Proc. Electr. Power Appl. 2005, 152, 369–381. [Google Scholar] [CrossRef] [Green Version]
- Singh, B.; Al-Haddad, K.; Chandra, A. Harmonic elimination, reactive power compensation and load balancing in three-phase, four-wire electric distribution systems supplying non-linear loads. Electr. Power Syst. Res. 1998, 44, 93–100. [Google Scholar] [CrossRef]
- Rao, U.K.; Mishra, M.K.; Ghosh, A. Control Strategies for Load Compensation Using Instantaneous Symmetrical Component Theory Under Different Supply Voltages. IEEE Trans. Power Deliv. 2008, 23, 2310–2317. [Google Scholar] [CrossRef]
- Antchev, M.H. Classical and Recent Aspects of Active Power Filters for Power Quality Improvement. In Classical and Recent Aspects of Power System Optimization; Zobaa, A.F., Aleem, S.A., Abdelaziz, A.Y., Eds.; Academic Press: London, UK, 2018; Chapter 9. [Google Scholar]
- Núñez-Zúñiga, T.E.; Pomilio, J.A. Shunt Active Power Filter Synthesizing Resistive Loads. IEEE Trans. Power Electron. 2002, 17, 273–278. [Google Scholar] [CrossRef]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- Montero, M.I.M.; Cadaval, E.R.; González, F.B. Comparison of Control Strategies for Shunt Active Power Filters in Three-Phase Four-Wire Systems. IEEE Trans. Power Electron. 2007, 22, 229–236. [Google Scholar] [CrossRef]
- Czarnecki, L.S. Comments on measurement and compensation of fictitious power under non-sinusoïdal voltage and current conditions. IEEE Trans. Power Electron. 1990, 5, 503–504. [Google Scholar] [CrossRef]
- Lafoz, M.; Iglesias, I.J.; Veganzones, C.; Visiers, M. A Novel Double Hysteresis-Band Current Control for a Three-Level Voltage Source Inverter. In Proceedings of the PESC 2000: 31th IEEE Annual Power Electronics Specialists Conference, Galway, Ireland, 18–23 June 2000; pp. 21–26. [Google Scholar]
- Aredes, M.; Heumann, K.; Watanabe, E.H. An universal active power line conditioner. IEEE Trans. Power Deliv. 1998, 13, 545–551. [Google Scholar] [CrossRef]
- von Jouanne, A.; Dai, S.; Zhang, H. A Multilevel Inverter Approach Providing DC-Link Balancing, Ride-Through Enhancement, and Common-Mode Voltage Elimination. IEEE Trans. Ind. Electron. 2002, 49, 739–745. [Google Scholar] [CrossRef]
- Bayona, J.; Gélvez, N.; Espitia, H. Design, Analysis, and Implementation of an Equalizer Circuit for the Elimination of Voltage Imbalance in a Half-Bridge Boost Converter with Power Factor Correction. Electronics 2020, 9, 2171. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 20 kHz | 10 mF | 25 A | 700 V | 2 mH | 5 µF |
| L | /X | |||
|---|---|---|---|---|
| 0.410 Ω/km | 0.713 Ω/km | 0.243 mH/km | 5.37 | 255 A |
| 50 µs | 1 mF | 400 V | 2.1 mH | 5 µF | 115 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Kooning, J.D.M.; Bozalakov, D.; Vandevelde, L. Discrete Time Domain Modeling and Control of a Grid-Connected Four-Wire Split-Link Converter. Electronics 2021, 10, 506. https://doi.org/10.3390/electronics10040506
De Kooning JDM, Bozalakov D, Vandevelde L. Discrete Time Domain Modeling and Control of a Grid-Connected Four-Wire Split-Link Converter. Electronics. 2021; 10(4):506. https://doi.org/10.3390/electronics10040506
Chicago/Turabian StyleDe Kooning, Jeroen D. M., Dimitar Bozalakov, and Lieven Vandevelde. 2021. "Discrete Time Domain Modeling and Control of a Grid-Connected Four-Wire Split-Link Converter" Electronics 10, no. 4: 506. https://doi.org/10.3390/electronics10040506