
Multi-Objective Grasshopper Optimization Based MPPT and VSC Control of Grid-Tied PV-Battery System

 ,
,  and
and 
Abstract
:1. Introduction
- MOGHO based scaling factor () optimization for VSS-InC MPPT to achieve faster tracking and reduced power oscillations at MPP.
- MOGHO based PI controller gains (,) optimization for the control and generation of an accurate loss current component ().
- AKWSOMCC based VSC control for fundamental load current component extraction.
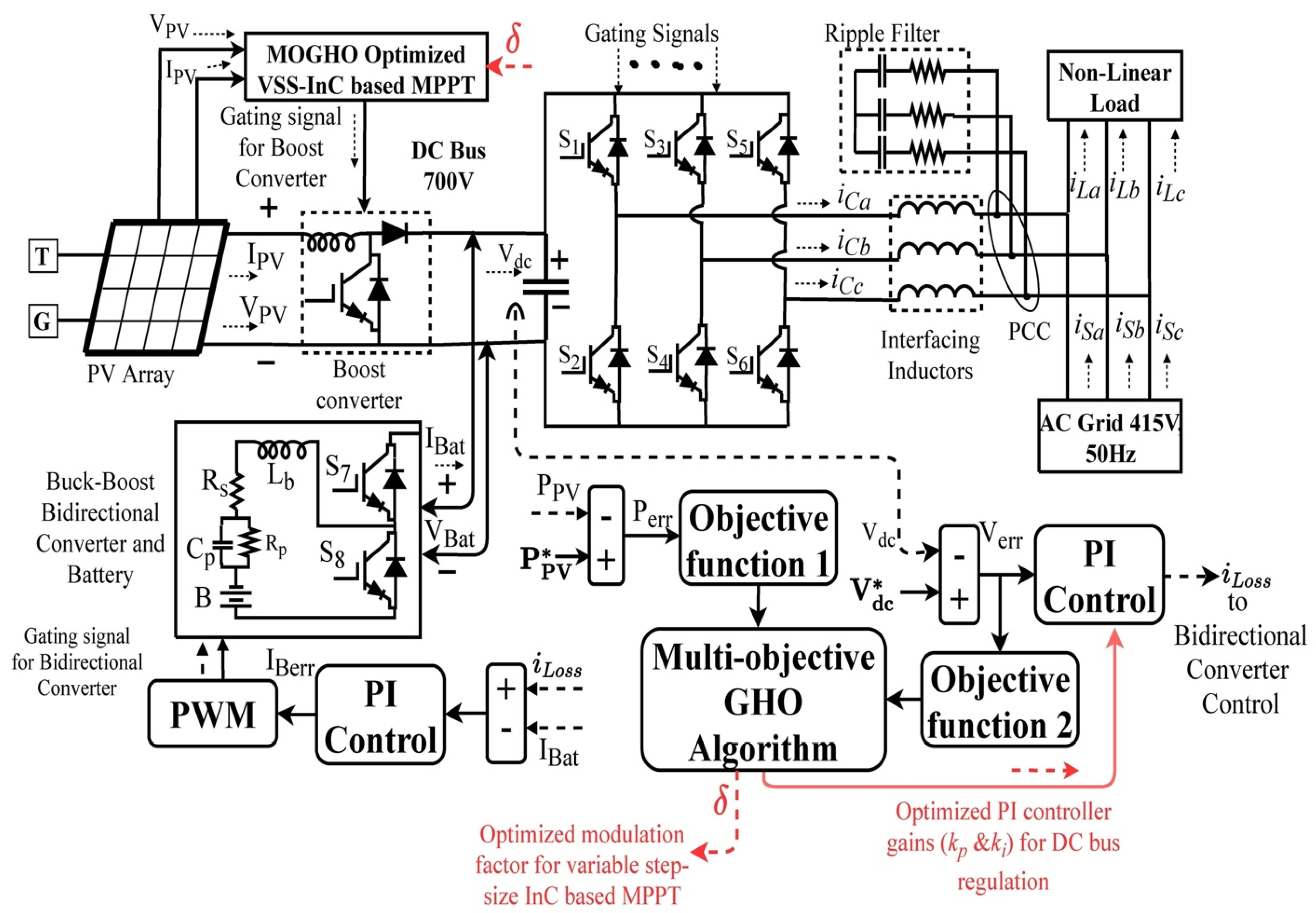
2. System Description
3. Implemented Research Methodology
4. Multi-Objective Grass-Hopper Optimization Algorithm and Implementation
4.1. MOGHO Based VSS–InC MPPT Control
4.2. MOGHO Based Vdc Control
5. AKWSOMCC Based VSC Control
6. Results and Discussion
6.1. MOGHO Based VSS–InC MPPT Analysis
6.2. MOGHO Algorithm Based DC Bus Analysis
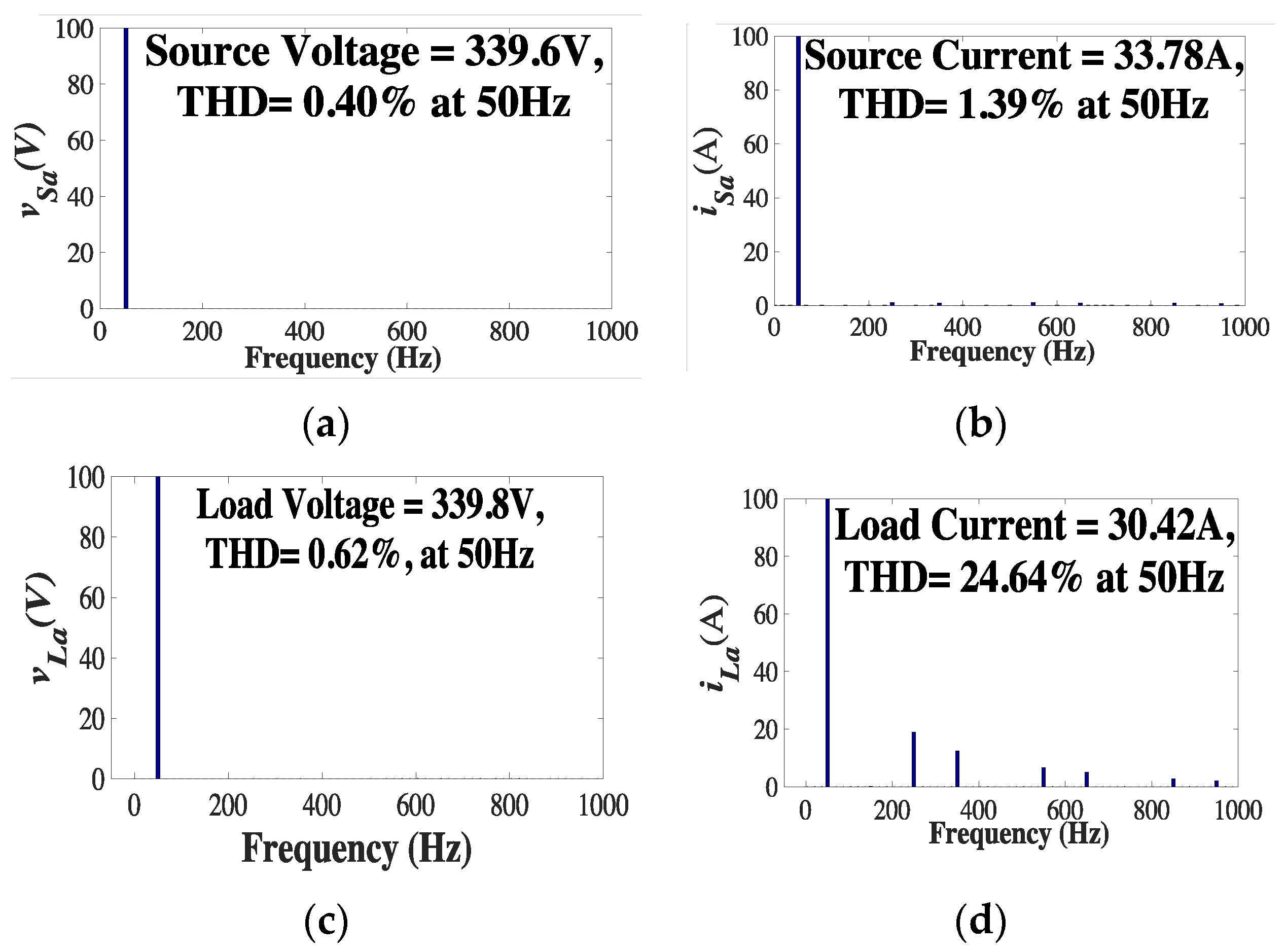
6.3. Steady-State Analysis
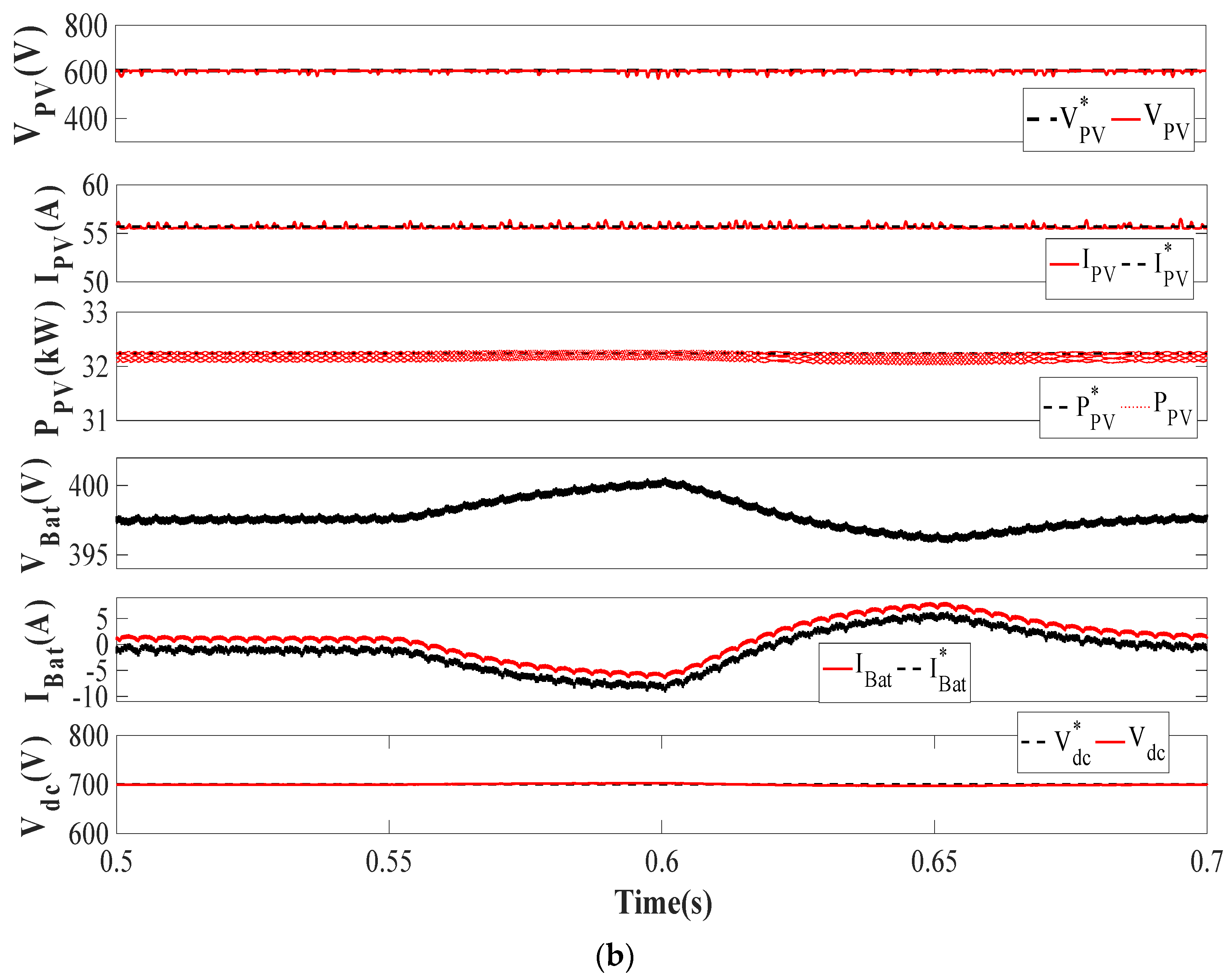
6.4. Irradiation Variation Analysis
6.5. Load Unbalancing Analysis
6.6. Specific Power Mode Analysis
6.7. Abnormal Grid Voltage Analysis
6.8. Internal Control Signals Analysis
7. Future Research Direction
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| D | Duty cycle |
| Duty cycle perturbation | |
| Scaling factor | |
| PI controller gains | |
| Loss component of current (A) | |
| Voltage magnitude (V) | |
| PV voltage (V) | |
| Reference PV voltage (V) | |
| PV current (A) | |
| Reference PV current (A) | |
| PV power (kW) | |
| Reference PV power (kW) | |
| DC bus voltage (V) | |
| Reference DC bus voltage (V) | |
| Fitness function | |
| Social interaction term | |
| Social force | |
| Gravity term | |
| g | Gravitational constant |
| Wind advection term | |
| Unit vector in wind direction | |
| Unit vector towards earth’s centre | |
| Comfort zone coefficient | |
| Maximum iteration | |
| Random numbers between [1, 0] | |
| f | Attraction intensity |
| l | Attraction length scale |
| Distance between and grasshopper | |
| Battery current (A) | |
| Reference battery current (A) | |
| Maximum battery current (A) | |
| Battery voltage (V) | |
| Adaptive kernel width | |
| Fixed kernel width | |
| Error signals | |
| In-phase components | |
| Weight signals | |
| Average weight signals | |
| Feed forward term | |
| Overall weight | |
| during fixed power mode | |
| Source voltage (V) | |
| Source current (A) | |
| Reference source current (A) | |
| Fixed power mode reference currents (A) | |
| Source voltage phase ‘a’ (V) | |
| Source current phase ‘a’ (A) | |
| Load voltage phase ‘a’ (V) | |
| Load current phase ‘a’ (A) | |
| Power delivered to grid (W) | |
| Reference | |
| Reactive power delivered to grid (W) | |
| Reference | |
| Upper and lower bound | |
| No. of search agents | |
| 3P-3W | Three-phase three-wire |
| ANN | Artificial neural network |
| MOSHO | Multi-objective grasshopper optimization |
| VSC | Voltage source converter |
| AKWSOMCC | Adaptive kernel width sixth order maximum correntropy criteria |
| InC | Incremental conductance |
| VSS-InC | Variable step-size InC |
| PI | Proportional integral |
| ISE-1 | Integral Square Error-1 |
| ISE-2 | Integral Square Error-2 |
| Obj-1 | First objective function |
| Obj-2 | Second objective function |
| SI | Swarm intelligence |
| GA | Genetic algorithm |
| PSO | Particle swarm optimization |
| PV | Photovoltaic |
| P&O | Perturb and observe |
| VSS-P&O | Variable step-size P&O |
| MPPT | Maximum power point tracking |
| MPP | Maximum power point |
| MOT | Meta-heuristic optimization technique |
| SSO | Salp swarm optimization |
| GNDO | Generalized normal distribution optimization |
| WOA | Whale optimization algorithm |
| DRL | Deep reinforcement learning |
| SAC | Soft actor-critic |
| DDPG | Deep reinforcement polocy gradient |
| EADDPG | Expert assiatent DDPG |
| SRF | Synchronous reference frame |
| PBT | Power balance theory |
| IARC | Instantaneous active reactive control |
| AARC | Average active reactive control |
| BPSC | Balanced positive sequence compensation |
| PNSC | Positive negative sequence compensation |
| KFC | Kalman filter based controls |
| ST | Stockwell transformation |
| LMS | Least mean square |
| LMF | Least mean fourth |
| MCC | Maximum correntropy criteria |
| HCLMS | Hyperbolic cosine LMS |
| HTF | Hyperbolic tangent function |
| ANF-LMS | Adaptive neuro-fuzzy LMS |
| ZALMF | Zero attracting LMF |
| NMCC | Normalized MCC |
| FFP | Fixed forward prediction |
| PCC | Point of common coupling |
| MSE | Mean square error |
| THD | Total harmonics distortion |
Appendix A
References
- Alluhaybi, K.; Member, S.; Batarseh, I. Comprehensive Review and Comparison of Microinverters. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1310–1329. [Google Scholar] [CrossRef]
- Gandhi, O.; Kumar, D.S.; Rodríguez-Gallegos, C.D.; Srinivasan, D. Review of power system impacts at high PV penetration Part I: Factors limiting PV penetration. Sol. Energy 2020, 210, 181–201. [Google Scholar] [CrossRef]
- Kumar, D.S.; Gandhi, O.; Rodríguez-Gallegos, C.D.; Srinivasan, D. Review of power system impacts at high PV penetration Part II: Potential solutions and the way forward. Sol. Energy 2020, 210, 202–221. [Google Scholar] [CrossRef]
- Mao, M.; Cui, L.; Zhang, Q.; Guo, K.; Zhou, L.; Huang, H. Classification and summarization of solar photovoltaic MPPT techniques: A review based on traditional and intelligent control strategies. Energy Rep. 2020, 6, 1312–1327. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Motahhir, S.; El Hammoumi, A.; El Ghzizal, A. The most used MPPT algorithms: Review and the suitable low-cost embedded board for each algorithm. J. Clean. Prod. 2020, 246, 118983. [Google Scholar] [CrossRef]
- Messalti, S.; Harrag, A.; Loukriz, A. A new variable step size neural networks MPPT controller: Review, simulation and hardware implementation. Renew. Sustain. Energy Rev. 2017, 68, 221–233. [Google Scholar] [CrossRef]
- Loukriz, A.; Haddadi, M.; Messalti, S. Simulation and experimental design of a new advanced variable step size Incremental Conductance MPPT algorithm for PV systems. ISA Trans. 2016, 62, 30–38. [Google Scholar] [CrossRef]
- Mei, Q.; Shan, M.; Liu, L.; Guerrero, J.M. A novel improved variable step-size incremental-resistance MPPT method for PV systems. IEEE Trans. Ind. Electron. 2011, 58, 2427–2434. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Kumar P, D.S.; Samanta, S.; Mishra, S. Steady output and fast tracking MPPT (SOFT-MPPT) for P&O and InC algorithms. IEEE Trans. Sustain. Energy 2021, 12, 293–302. [Google Scholar] [CrossRef]
- Pandey, A.; Dasgupta, N.; Mukerjee, A.K. High-performance algorithms for drift avoidance and fast tracking in solar MPPT system. IEEE Trans. Energy Convers. 2008, 23, 681–689. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Qahouq, J.A.A.; Haskew, T.A. Adaptive step size with adaptive-perturbation-frequency digital MPPT controller for a single-sensor photovoltaic solar system. IEEE Trans. Power Electron. 2013, 28, 3195–3205. [Google Scholar] [CrossRef]
- Chen, Y.T.; Lai, Z.H.; Liang, R.H. A novel auto-scaling variable step-size MPPT method for a PV system. Sol. Energy 2014, 102, 247–256. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, J.; Salam, Z. A Modified P and O Maximum Power Point Tracking Method with Reduced Steady-State Oscillation and Improved Tracking Efficiency. IEEE Trans. Sustain. Energy 2016, 7, 1506–1515. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Self-Adaptive Incremental Conductance Algorithm for Swift and Ripple-Free Maximum Power Harvesting from PV Array. IEEE Trans. Ind. Inform. 2018, 14, 2031–2041. [Google Scholar] [CrossRef]
- Mansoor, M.; Mirza, A.F.; Ling, Q.; Javed, M.Y. Novel Grass Hopper optimization based MPPT of PV systems for complex partial shading conditions. Sol. Energy 2020, 198, 499–518. [Google Scholar] [CrossRef]
- Jumani, T.A.; Mustafa, M.W.; Alghamdi, A.S.; Rasid, M.M.; Alamgir, A.; Awan, A.B. Swarm Intelligence-Based Optimization Techniques for Dynamic Response and Power Quality Enhancement of AC Microgrids: A Comprehensive Review. IEEE Access 2020, 8, 75986–76001. [Google Scholar] [CrossRef]
- Mishra, S.; Ray, P.K. Power Quality Improvement Using Photovoltaic Fed DSTATCOM Based on JAYA Optimization. IEEE Trans. Sustain. Energy 2016, 7, 1672–1680. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A.; Khan, I.; Muyeen, S.M. Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System. Energies 2021, 14, 1356. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A.; Malik, H.; Márquez, F.P.G. Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System. Energies 2021, 14, 4355. [Google Scholar] [CrossRef]
- Mosaad, M.I.; Ramadan, H.S.M.; Aljohani, M.; El-Naggar, M.F.; Ghoneim, S.S.M. Near-Optimal PI Controllers of STATCOM for Efficient Hybrid Renewable Power System. IEEE Access 2021, 9, 34119–34130. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Li, W.; Wang, Y.; Li, Y.; Sauer, D.U. Battery Thermal-and Health-Constrained Energy Management for Hybrid Electric Bus Based on Soft Actor-Critic DRL Algorithm. IEEE Trans. Ind. Inform. 2021, 17, 3751–3761. [Google Scholar] [CrossRef]
- Wei, Z.; Quan, Z.; Wu, J.; Li, Y.; Pou, J.; Zhong, H. Deep Deterministic Policy Gradient-DRL Enabled Multiphysics-Constrained Fast Charging of Lithium-Ion Battery. IEEE Trans. Ind. Electron 2021, in press. [Google Scholar] [CrossRef]
- Wu, J.; Wei, Z.; Liu, K.; Quan, Z.; Li, Y. Battery-Involved Energy Management for Hybrid Electric Bus Based on Expert-Assistance Deep Deterministic Policy Gradient Algorithm. IEEE Trans. Veh. Technol. 2020, 69, 12786–12796. [Google Scholar] [CrossRef]
- Bhim, S.; Chandra, A.; Al-haddad, K. Power Quality Problems and Mitigation Techniques-Wiley Online Library. Available online: http://onlinelibrary.wiley.com/book/10.1002/9781118922064 (accessed on 1 January 2015).
- Abbassi, R.; Marrouchi, S.; Saidi, S.; Abbassi, A.; Chebbi, S. Optimal energy management strategy and novel control approach for DPGSs under unbalanced grid faults. J. Circuits Syst. Comput. 2019, 28, 1950057. [Google Scholar] [CrossRef]
- Shen, M.; Xiong, K.; Wang, S. Multikernel adaptive filtering based on random features approximation. Signal Process. 2020, 176, 107712. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, B.; Kumar, R.; Marwaha, S. Recognition of underlying causes of power quality disturbances using stockwell transform. IEEE Trans. Instrum. Meas. 2020, 69, 2798–2807. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. Application of LMS-based NN structure for power quality enhancement in a distribution network under abnormal conditions. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1598–1607. [Google Scholar] [CrossRef] [PubMed]
- Agarwal, R.K.; Hussain, I.; Singh, B. LMF-based control algorithm for single stage three-phase grid integrated solar PV system. IEEE Trans. Sustain. Energy 2016, 7, 1379–1387. [Google Scholar] [CrossRef]
- Modi, G.; Kumar, S.; Singh, B. A Maximum Correntropy Criteria Based Adaptive Algorithm for an Improved Power Quality SPV System. In Proceedings of the 8th IEEE Power India International Conference (PIICON), Kurukshetra, India, 10–12 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kumar, A.; Seema; Singh, B.; Jain, R. Double stage grid-tied solar PV system using HC-LMS control. In Proceedings of the 2020-9th IEEE Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 3–8. [Google Scholar] [CrossRef]
- Jain, V.; Hussain, I.; Singh, B. A HTF-Based Higher-Order Adaptive Control of Single-Stage Grid-Interfaced PV System. IEEE Trans. Ind. Appl. 2019, 55, 1873–1881. [Google Scholar] [CrossRef]
- Srinivas, M.; Hussain, I.; Singh, B. Combined LMS–LMF-Based Control Algorithm of DSTATCOM for Power Quality Enhancement in Distribution System. IEEE Trans. Ind. Electron. 2016, 63, 4160–4168. [Google Scholar] [CrossRef]
- Badoni, M.; Singh, A.; Singh, B. Adaptive Neurofuzzy Inference System Least-Mean-Square-Based Control Algorithm for DSTATCOM. IEEE Trans. Ind. Inform. 2016, 12, 483–492. [Google Scholar] [CrossRef]
- Singh, A.K.; Hussain, I.; Singh, B. Double-Stage Three-Phase Grid-Integrated Solar PV System With Fast Zero Attracting Normalized Least Mean Fourth Based Adaptive Control. IEEE Trans. Ind. Electron. 2018, 65, 3921–3931. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A. Seamless control of grid-tied PV-Hybrid Energy Storage System. Int. J. Emerg. Electr. Power Syst. 2021, 22, 000010151520210090. [Google Scholar] [CrossRef]
- Jain, V.; Hussain, I.; Singh, B. A FFP Based Adaptive Control of SPV System Tied to Weak Grid. IEEE Trans. Ind. Appl. 2018, 54, 3112–3121. [Google Scholar] [CrossRef]
- Chankaya, M.; Ahmad, A.; Hussain, I. Adaptive Kernel Width Maximum Correntropy based VSC control of grid-tied PV-BESS System. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Shillong, Meghalaya, India, 5–7 March 2021; pp. 1–6. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | MOGHO | PSO | GA | With Initially Selected |
|---|---|---|---|---|
| settling time | 2.11 ms | 3.04 ms | 3.75 ms | 12.50 ms |
| settling time | 2.12 ms | 3.02 ms | 3.74 ms | 13.25 ms |
| Boost Converter Efficiency | 99.82% | 99.61% | 99.42% | 98.82% |
| VSC Efficiency | 99.23% | 99.11% | 98.79% | 98.47% |
| Total dual-stage Losses (W) | 308 W | 414 W | 580 W | 875 W |
| Decision Variables | MOGHO | PSO | GA | Without Optimization |
|---|---|---|---|---|
| 1.22 | 0.94 | 0.82 | 1 | |
| 0.89 | 0.71 | 0.38 | 0 | |
| 0.00071 | 0.00049 | 0.00036 | 0.0001 |
| Parameters | MOGHO | PSO | GA | Without Optimization |
|---|---|---|---|---|
| Computational burden | High | Moderate | Moderate | None |
| Rise time | 0.8 ms | 0.85 ms | 1.3 ms | 1.78 ms |
| Settling time | 3 ms | 6 ms | 6.5 ms | 15 ms |
| Steady-state error | 0.061% | 0.064% | 0.143% | 0.121% |
| Dynamic-state error (Irradiation change) | 1.800% | 2.457% | 2.943% | 3.929% |
| Dynamic-state error (Load unbalancing) | 0.200% | 0.571% | 0.671% | 1.857% |
| Dynamic-state error (Fixed power mode) | 0.829% | 1.243% | 1.643% | 2.571% |
| Dynamic-state error (Abnormal grid voltage) | 1.686% | 2.200% | 2.586% | 3.486% |
| Transient-state error | 1.229% | 1.264% | 1.886% | 2.714% |
| Parameters | MOGHO | PSO | GA | Without Optimization |
|---|---|---|---|---|
| vSa | 0.40% | 0.44% | 0.43% | 0.49% |
| iSa | 1.39% | 1.89% | 2.37% | 2.82% |
| vLa | 0.62% | 0.61% | 0.62% | 0.62% |
| iLa | 24.64% | 24.64% | 24.64% | 24.64% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chankaya, M.; Hussain, I.; Ahmad, A.; Malik, H.; García Márquez, F.P. Multi-Objective Grasshopper Optimization Based MPPT and VSC Control of Grid-Tied PV-Battery System. Electronics 2021, 10, 2770. https://doi.org/10.3390/electronics10222770
Chankaya M, Hussain I, Ahmad A, Malik H, García Márquez FP. Multi-Objective Grasshopper Optimization Based MPPT and VSC Control of Grid-Tied PV-Battery System. Electronics. 2021; 10(22):2770. https://doi.org/10.3390/electronics10222770
Chicago/Turabian StyleChankaya, Mukul, Ikhlaq Hussain, Aijaz Ahmad, Hasmat Malik, and Fausto Pedro García Márquez. 2021. "Multi-Objective Grasshopper Optimization Based MPPT and VSC Control of Grid-Tied PV-Battery System" Electronics 10, no. 22: 2770. https://doi.org/10.3390/electronics10222770