1. Introduction
Vehicles are important tools in everyday life. More and more vehicle applications are developing, such as autonomous vehicles. Safety is important for vehicle applications and this issue is continuously being discussed. There are some elements that affect the safety of vehicles, tires being one of them. The vehicle works with tires that contact the road surface. These contact points provide some useful information from the road. Using the information to improve driving safety is not an easy task, which is why there are more and more studies focused on intelligent tires.
Some researchers provide methods that monitor the tire status. The (TPMS) [
1,
2,
3,
4,
5] is one of intelligent tire applications that has emerged in recent years. It is a common device for vehicle applications that provides tire pressure and temperature information to drivers. The TPMS alarm indicates that there are some problems with tire pressure or temperature. This warning message helps the driver or user to pay attention to the problematic tire. This kind of intelligent tire application has matured in recent years, and we discuss in this paper means to enhance its function.
The tire has some deformations when used on the road. The deformations provide some messages about the tire status. Some research uses a Hall sensor to detect tire deformation [
6]. The sensor responds to different voltage values when the field changes. Researchers use the different magnetic fields to detect tire deformation. This method is complicated to implement because it needs an advanced semiconductor and tire process, but provides a suitable foundation for intelligent tires in the future. In this paper, the tire wear estimation method uses a Hall sensor to estimate the tire wear status and it has some differences from the above method. The integrated design makes the implementation easy, because the Hall sensor does not integrate with the tire rubber.
A strain gauge is used in the method [
7]. The method can effectively reduce costs, but the reliability is relatively not strong enough. A strain gauge is easy to damage when the structure is used for long period because the material is broken easily by long-term vibrations. Given this lack of durability, there are few applications in the market. Because the structure is easy to apply in experiments, we used a similar structure for our experiment and propose an improved structure to solve the durability issues.
A three-axis sensor is a sensing element often used in intelligent tires. There are many studies that use three-axis sensors. Some works are based on the sensor to develop applications such as tire pressure, tire load, and vehicle tracking [
8,
9,
10]. The road surface is one of the conditions of the vehicle application. There is research that uses a three-axis sensor to detect the road surface status for the application [
11], employing an ANN (Artificial Neural Network) to implement the method. These studies have proposed many effective and reference methods, but they rarely discuss the relationship between mileage and wear. In this paper, we focus on the relationship between mileage and wear.
Some studies analyze tire wear in intelligent tire applications, using optics sensors to estimate wear [
12,
13]. Image recognition is the main method of this technology. One group of researchers used the camera to catch image information and a computer to execute an image recognition algorithm [
14]. Optics sensors are key, but they are costly. Moreover, the method needs a lot of calculations, which means more hardware performance and resources. How and where to install the sensors are issues, too. Another aim of this paper is to solve the cost and integration issues with some easy-to-use sensors.
In our research, we propose a method to estimate the tire mileage and wear. Our method integrates a Hall sensor and a three-axis sensor. The integration solution takes some information that the algorithm needs. The tire lifecycle relates to the mileage and wear, and we dissect the relationship between mileage and wear. The method also considers the power consumption that the algorithm does not execute all the time. A process controls the execution time and considers the algorithm operation time to reduce the power consumption. With this procedure, the method resembles real-world conditions. Finally, we verified the system in an experiment using different conditions to confirm the algorithm.
This paper consists of five total sections.
Section 2 describes the framework and method. The method includes a procedure and algorithm.
Section 3 presents the verification results. The final section reports the conclusions and evolution plan.
3. Results
In this section, we verify and analyze the results. Two parts are verified: tire wear and mileage. The wear state result is presented in the six statuses, as proposed previously. The tire mileage is displayed in kilometers, indicating how many kilometers have been traveled. We discuss different loads and speeds that can affect the algorithm.
3.1. Tire Wear Status Result
The tire wear status is presented by voltage value because the method measures the magnetic through the Hall sensor. The Hall sensor converts the magnetic flux density to the voltage value. There are two groups of results shown in
Figure 13. Group 1 is the rubber magnetic value. The value set is measured by each piece, and there is no medium. Group 2 is the measurement data with a medium. The result is compared by the different measurements with or without the tire. The tire can affect the magnetic flux because the tire has a wiring layer that can shield some magnetic forces. The results show the influence of the medium. Although the results are somewhat biased, they have a trend. The deviations are due to measurement techniques and the experiment’s tire slices. Because there is no guarantee that the rubber will be placed in the same position every time, this can cause a measurement error. The impact of deviations is ignored in this experiment.
Figure 13 describes the magnetic trend discovered through some measurements. The figure has six measurement values. The six measurement values compare the rubber magnetic value, representing the medium’s influence. If the measurement has a tire as the medium, the Hall sensor senses that the magnetic field value is reduced. The result can describe the magnetic flux density change as a trend, and the effectiveness of the method is verified.
Figure 13 shows that the magnetic values are not the same, but the values have the same trend. The result fits the concept of the method. This phenomenon can affect the method design. This is the reason why the method uses mileage information to support the wear measurement.
3.2. Tire Mileage Result
We verified the mileage method on the test platform described earlier with the Hall sensor installed in the tire. The platform provided the data when the tire was rolling. The test conditions included speed and load. The speed had three conditions: 40 km/h, 60 km/h, and 80 km/h. The tire spec was 235/60 R18 and the tire load in this experiment was 585 kg. The conditions are listed in
Table 1. The result shows that the tire perimeter becomes longer when the tire has a load. The perimeter is considered with load in our experiment. The mileage estimation method is based on the pulse that forms the three-axis signal. There is a time gap between the two pulses. The speed value is calculated by the time gap. The speed value can help users verify the correctness of the results because the speed is a known experimental condition. The results show that there an error between actual speed and estimated speed. The estimated speed is shown in
Figure 14. The error rate observed from the test result is under 0.38%. Actual mileage is compared with estimated mileage in
Table 1. The method has an error rate under 0.6%. Additionally, it has an error of 300 km when the tire is used for 50,000 km. The results prove that the algorithm has a low error rate.
Each tire has limited mileage and service life. The mileage and wear have some relations that include load and usage habits. Driving habits and wear-resistant tires complicate conditions for the estimation. Tire lifetime is not discussed in this paper. We executed our experiment in the lab and the evaluation conditions were objective. The method can provide some reference information and indirectly improve vehicle safety, which is one of our motivations. There is room for improvement in follow-up studies from the perspective of mass production, such as power supply size and integration. These issues will be discussed separately in the future. In sum, our method uses rubber with a magnetic field to simulate a tire with a magnetic field. We calculated the magnetic field strength to monitor the tire wear. However, the magnetic field absorbs some metal substances and increases the tire wear estimation. Verification with long-term experiments may be useful to elucidate these relations.
4. Conclusions
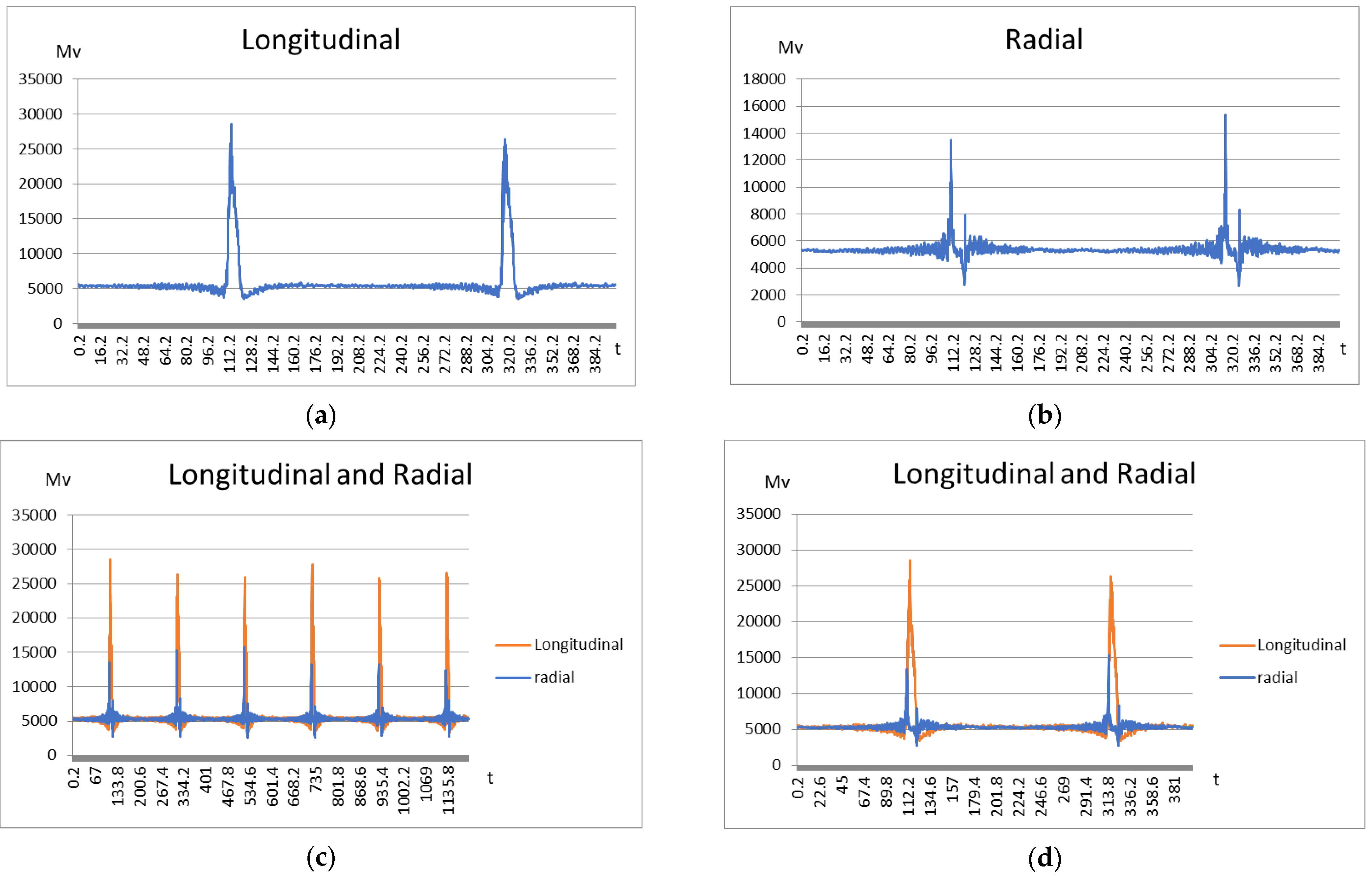
Every driver knows that there is a certain relationship between tire mileage and wear. We developed a method to estimate tire mileage and wear status that enables users to understand tire usage easily. This method uses magnetic force to estimate tire wear. Tire manufacturers use carbon nanotubes as materials to make tires magnetic through processing. This method obtains the magnetic field strength value through a Hall sensor. Considering the relationship between mileage and wear, we propose a mileage estimation method based on a three-axis sensor to support tire wear estimation. The mileage estimation uses the longitudinal axis, the radial axis data, and the tire circumference. The distance traveled is estimated from the longitudinal information. To ensure the correctness of the vertical axis data, the radial axis information is used for verification. The dynamometer is the equipment that verifies the mileage estimation algorithm. Our experiments confirmed that the average error rate of the proposed method is about 0.6%. The result of the experiment is that mileage information is reference information.
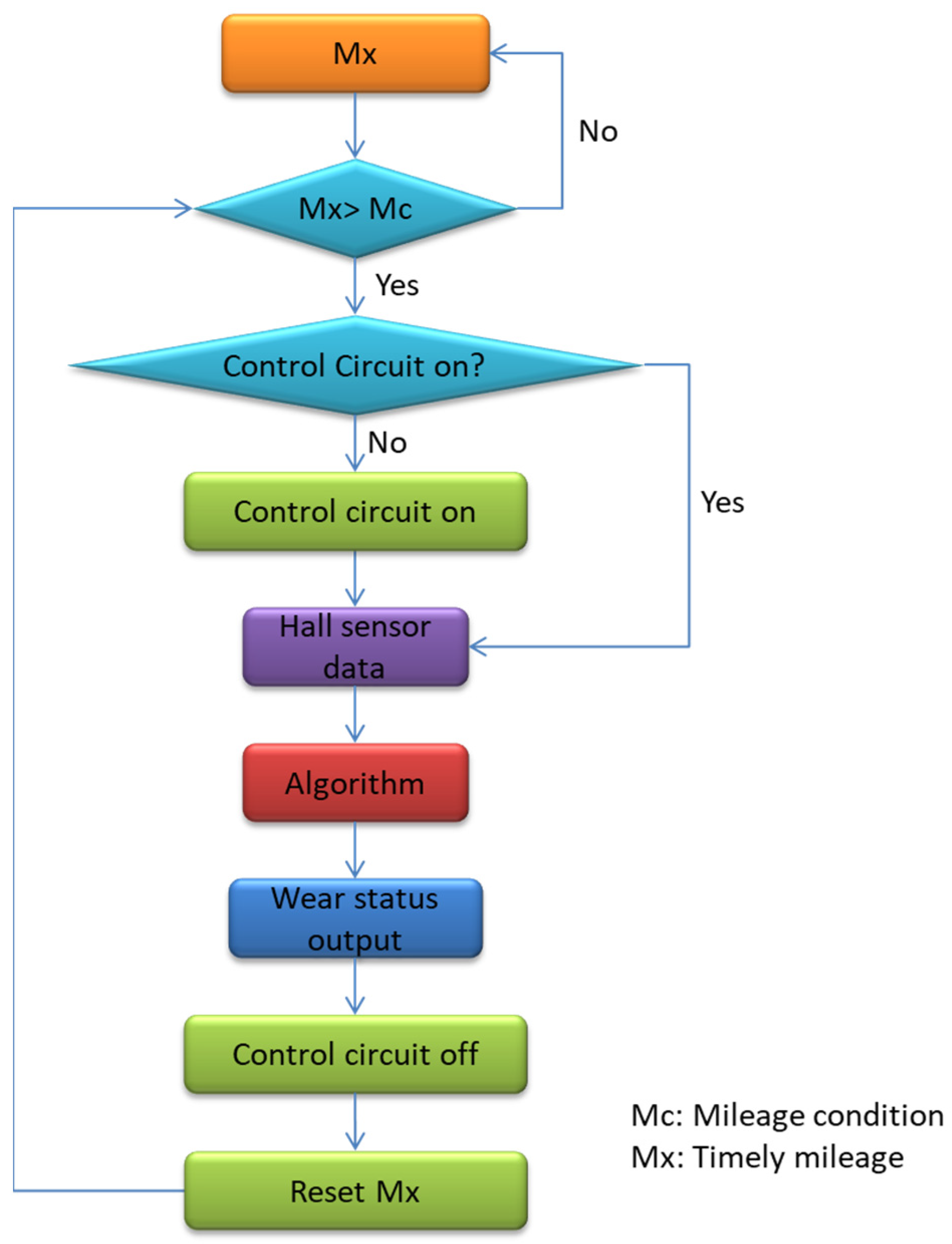
Considering tire wear speed and system energy consumption, we developed a control mechanism to reduce power consumption. Because tire wear is gradual, the tire wear estimation algorithm does not need to be functioning all the time. The mileage information is a signal to trigger this mechanism, which can effectively reduce the application’s power consumption. This mechanism gives application a longer lifetime if the power source is a battery. The solutions to these problems establish this method as suitable to adopt in future applications.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}