
Transient Stability Enhancement of a Grid-Connected Large-Scale PV System Using Fuzzy Logic Controller



Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Reviews
1.3. Contributions
- (1)
- A new FLC is incorporated along with the traditional PI controller in the inner loop of the cascaded control technique to enrich the LVRT proficiency of a PV system. Due to its variable gain, the proposed FLC will inject an efficient quantity of reactive power to maintain the terminal voltage at pre-fault value. The single FLC in a cascaded controller will offer less computation burden and is cheaper than having many FLCs in the cascaded controller [29].
- (2)
- A comparative analysis is presented, comparing the proposed control strategy with the conventional control strategy developed in Ref. [30]; this shows the importance of the proposed control strategy, taking the severe three-line-to-ground (3LG) fault into account.
- (3)
- Design procedures of the proposed PV system, protection system, and maximum power point tracking (MPPT) system are also presented in detail.
- (4)
- Finally, the transient stability of the grid system both for the proposed and for the conventional controllers of the PV station/plant is judged by transient stability index computation [31]. This is one of the prominent aspects of this paper.
1.4. Organization
2. Design of a PV Power Station
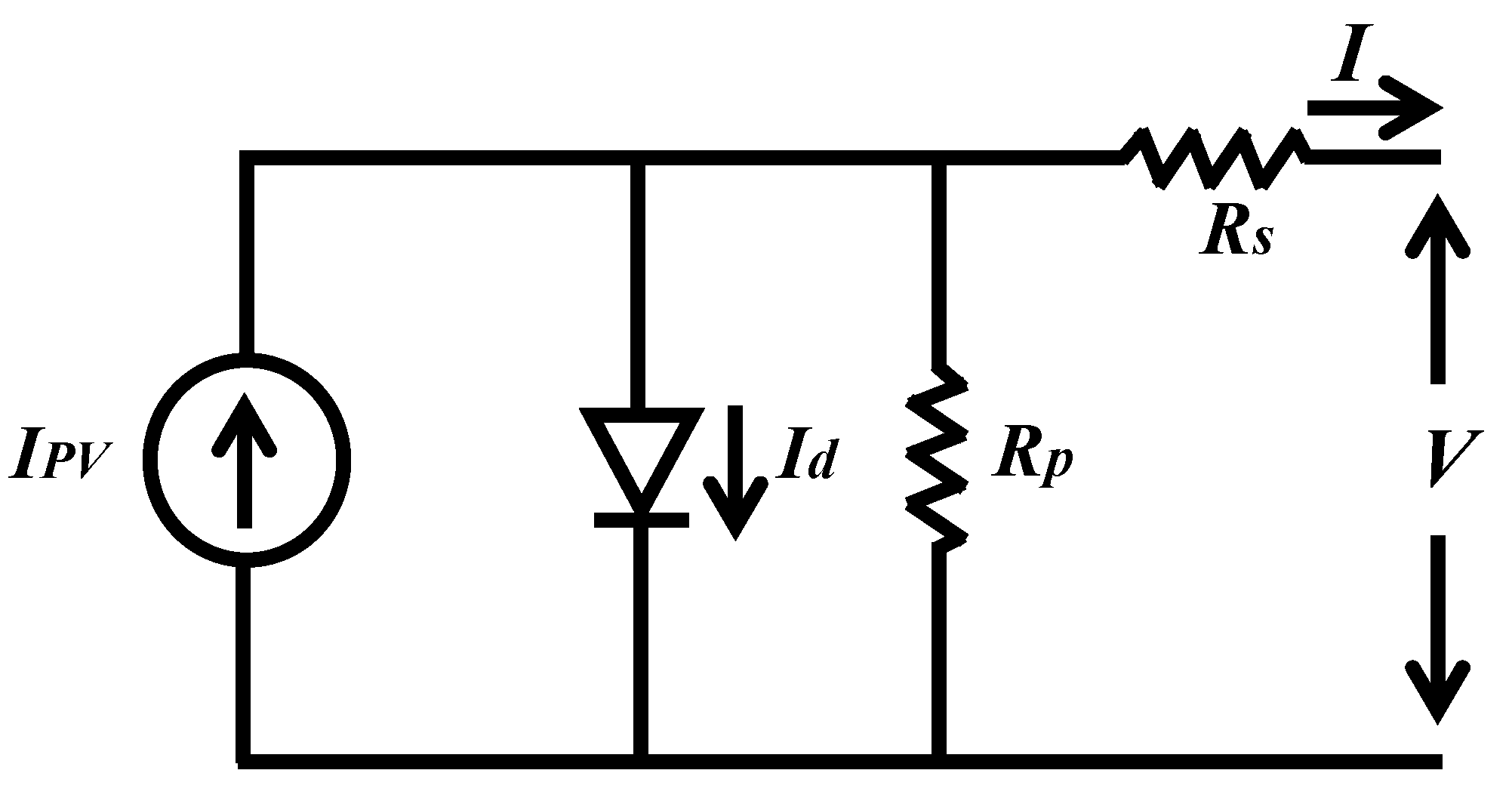
2.1. PV Array Design
2.2. Boost Converter Controller and MPPT
2.3. Proposed GSC Controller
2.4. Proposed FLC Design
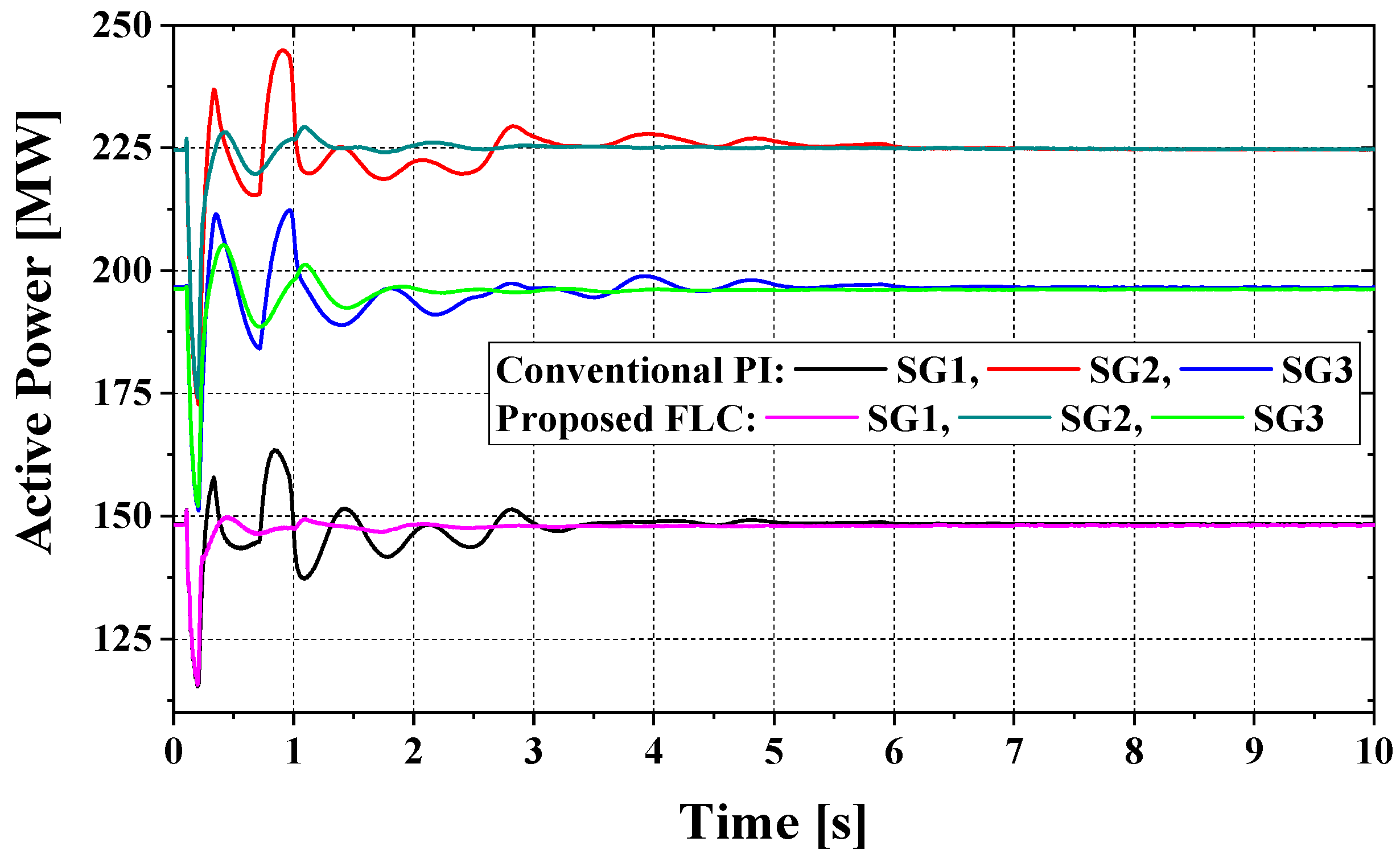
3. Simulation Results and Discussion
4. Transient Stability Evaluation
5. Conclusions
- The proposed technique provides a faster response and increased accuracy in maintaining the terminal voltage of the PV plant and the transient stability of the entire system.
- The proposed FLC-controlled GSC controller offers an almost negligible voltage dip after a severe network fault.
- The proposed control method deals with the system’s non-linearities more effectively.
Author Contributions
Funding
Conflicts of Interest
References
- Islam, G.; Muyeen, S.M.; Al-Durra, A.; Hasanien, H.M. RTDS Implementation of an Improved Sliding Mode Based Inverter Controller for PV System. ISA Trans. 2016, 62, 50–59. [Google Scholar] [CrossRef]
- Mojallal, A.; Lotfifard, S. Enhancement of Grid Connected PV Arrays Fault Ride Through and Post Fault Recovery Performance. IEEE Trans. Smart Grid 2019, 10, 546–555. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Identification of Electrical Parameters for Three-Diode Photovoltaic Model Using Analytical and Sunflower Optimization Algorithm. Appl. Energy 2019, 250, 109–117. [Google Scholar] [CrossRef]
- Choi, U.-M. Study on Effect of Installation Location on Lifetime of PV Inverter and DC-to-AC Ratio. IEEE Access 2020, 8, 86003–86011. [Google Scholar] [CrossRef]
- Trends in Photovoltaic Applications 2019, International Energy Agency. Available online: https://iea-pvps.org/ (accessed on 22 May 2021).
- Global Market Outlook: For Solar Power/2019–2023. Available online: https://www.solarpowereurope.org/ (accessed on 22 May 2021).
- Lai, C.S.; Jia, Y.; Lai, L.L.; Xu, Z.; McCulloch, M.D.; Wong, K.P. A Comprehensive Review on Large-Scale Photovoltaic System with Applications of Electrical Energy Storage. Renew. Sustain. Energy Rev. 2017, 78, 439–451. [Google Scholar] [CrossRef]
- Eftekharnejad, S.; Vittal, V.; Heydt, G.T.; Keel, B.; Loehr, J. Impact of Increased Penetration of Photovoltaic Generation on Power Systems. IEEE Trans. Power Syst. 2013, 28, 893–901. [Google Scholar] [CrossRef]
- Xiao, Q.; Zhao, K.; Jiang, W.; Zhu, S. The Effect of Large-Scale PV Power on Stability of Power System. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 1173–1177. [Google Scholar]
- Anzalchi, A.; Sarwat, A. Overview of Technical Specifications for Grid-Connected Photovoltaic Systems. Energy Convers. Manag. 2017, 152, 312–327. [Google Scholar] [CrossRef]
- Liu, S.; Liu, P.X.; Wang, X. Stability Analysis of Grid-Interfacing Inverter Control in Distribution Systems with Multiple Photovoltaic-Based Distributed Generators. IEEE Trans. Ind. Electron. 2016, 63, 7339–7348. [Google Scholar] [CrossRef]
- Brooks, D.L.; Patel, M. Panel: Standards Amp; Interconnection Requirements for Wind and Solar Generation NERC Integrating Variable Generation Task Force. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–3. [Google Scholar]
- Yongning, C.; Yan, L.; Zhen, L.; Ziyu, C.; Hongzhi, L. Study on Grid-Connected Renewable Energy Grid Code Compliance. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 72–75. [Google Scholar]
- RajaMohamed, S.; Jeyanthy, P.A.; Devaraj, D.; Bouzguenda, M. Performance Comparison of Active and Passive LVRT Strategies for Grid Connected PV Systems. In Proceedings of the 2019 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), Tamilnadu, India, 11–13 April 2019; pp. 1–5. [Google Scholar]
- Mirhosseini, M.; Agelidis, V.G. Performance of Large-Scale Grid-Connected Photovoltaic System under Various Fault Conditions. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 1775–1780. [Google Scholar]
- Islam, S. Challenges and Opportunities in Grid Connected Commercial Scale PV and Wind Farms. In Proceedings of the 2016 9th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 20–22 December 2016; pp. 1–7. [Google Scholar]
- E. ON NETZ GmbH. Grid Connection Regulation for High and Extra High Voltage; E. ON NETZ GmbH: Essen, Germany, 2006. [Google Scholar]
- Tian, H.; Gao, F.; Ma, C. Novel Low Voltage Ride through Strategy of Single-Stage Grid-Tied Photovoltaic Inverter with Supercapacitor Coupled. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; Volume 2, pp. 1188–1192. [Google Scholar]
- El Moursi, M.S.; Xiao, W.; Kirtley, J.L., Jr. Fault Ride through Capability for Grid Interfacing Large Scale PV Power Plants. IET Gener. Transm. Distrib. 2013, 7, 1027–1036. [Google Scholar] [CrossRef]
- Kawabe, K.; Tanaka, K. Impact of Dynamic Behavior of Photovoltaic Power Generation Systems on Short-Term Voltage Stability. IEEE Trans. Power Syst. 2015, 30, 3416–3424. [Google Scholar] [CrossRef]
- Hasanien, H.M. Performance Improvement of Photovoltaic Power Systems Using an Optimal Control Strategy Based on Whale Optimization Algorithm. Electr. Power Syst. Res. 2018, 157, 168–176. [Google Scholar] [CrossRef]
- Hasanien, H.M.; Muyeen, S.M. Design Optimization of Controller Parameters Used in Variable Speed Wind Energy Conversion System by Genetic Algorithms. IEEE Trans. Sustain. Energy 2012, 3, 200–208. [Google Scholar] [CrossRef]
- Hasanien, H.M.; Muyeen, S.M. A Taguchi Approach for Optimum Design of Proportional-Integral Controllers in Cascaded Control Scheme. IEEE Trans. Power Syst. 2013, 28, 1636–1644. [Google Scholar] [CrossRef] [Green Version]
- Ambia, M.N.; Hasanien, H.M.; Al-Durra, A.; Muyeen, S.M. Harmony Search Algorithm-Based Controller Parameters Optimization for a Distributed-Generation System. IEEE Trans. Power Deliv. 2015, 30, 246–255. [Google Scholar] [CrossRef]
- Elazab, O.S.; Debouza, M.; Hasanien, H.M.; Muyeen, S.M.; Al-Durra, A. Salp Swarm Algorithm-Based Optimal Control Scheme for LVRT Capability Improvement of Grid-Connected Photovoltaic Power Plants: Design and Experimental Validation. IET Renew. Power Gener. 2020, 14, 591–599. [Google Scholar] [CrossRef]
- Hasanien, H.M.; Matar, M. A Fuzzy Logic Controller for Autonomous Operation of a Voltage Source Converter-Based Distributed Generation System. IEEE Trans. Smart Grid 2015, 6, 158–165. [Google Scholar] [CrossRef]
- Chaiyatham, T.; Ngamroo, I. Improvement of Power System Transient Stability by PV Farm with Fuzzy Gain Scheduling of PID Controller. IEEE Syst. J. 2017, 11, 1684–1691. [Google Scholar] [CrossRef]
- Hossain, M.K.; Ali, M.H. Transient Stability Augmentation of PV/DFIG/SG-Based Hybrid Power System by Nonlinear Control-Based Variable Resistive FCL. IEEE Trans. Sustain. Energy 2015, 6, 1638–1649. [Google Scholar] [CrossRef]
- Soliman, M.A.; Hasanien, H.M.; Azazi, H.Z.; El-Kholy, E.E.; Mahmoud, S.A. An Adaptive Fuzzy Logic Control Strategy for Performance Enhancement of a Grid-Connected PMSG-Based Wind Turbine. IEEE Trans. Ind. Inf. 2019, 15, 3163–3173. [Google Scholar] [CrossRef]
- Ahmed, A.; Hazari, M.R.; Jahan, E.; Mannan, M.A. A Robust Control Strategy to Improve Low Voltage Ride-Through of a Grid-Connected Photovoltaic System. Int. J. Power Energy Syst. 2021, 41, 9–16. [Google Scholar]
- Yagami, M.; Murata, T.; Tamura, J. An Analysis of Optimal Reclosing for Enhancement of Transient Stability. Electr. Eng. Jpn. 2004, 147, 32–39. [Google Scholar] [CrossRef]
- Khanna, V.; Das, B.K.; Bisht, D.; Vandana; Singh, P.K. A Three Diode Model for Industrial Solar Cells and Estimation of Solar Cell Parameters Using PSO Algorithm. Renew. Energy 2015, 78, 105–113. [Google Scholar] [CrossRef]
- Hasanien, H.M. An Adaptive Control Strategy for Low Voltage Ride Through Capability Enhancement of Grid-Connected Photovoltaic Power Plants. IEEE Trans. Power Syst. 2016, 31, 3230–3237. [Google Scholar] [CrossRef]
- Hasanien, H.M. Shuffled Frog Leaping Algorithm for Photovoltaic Model Identification. IEEE Trans. Sustain. Energy 2015, 6, 509–515. [Google Scholar] [CrossRef]
- Mahmoud, Y.A.; Xiao, W.; Zeineldin, H.H. A Parameterization Approach for Enhancing PV Model Accuracy. IEEE Trans. Ind. Electron. 2013, 60, 5708–5716. [Google Scholar] [CrossRef]
- Kadri, R.; Gaubert, J.-P.; Champenois, G. An Improved Maximum Power Point Tracking for Photovoltaic Grid-Connected Inverter Based on Voltage-Oriented Control. IEEE Trans. Ind. Electron. 2011, 58, 66–75. [Google Scholar] [CrossRef]
- Kiani, A.T.; Nadeem, M.F.; Ahmed, A.; Khan, I.; Elavarasan, R.M.; Das, N. Optimal PV Parameter Estimation via Double Exponential Function-Based Dynamic Inertia Weight Particle Swarm Optimization. Energies 2020, 13, 4037. [Google Scholar] [CrossRef]
- Islam, G.M.S.; Al-Durra, A.; Muyeen, S.M.; Tamura, J. A Robust Control Scheme to Enhance the Stability of a Grid-Connected Large Scale Photovoltaic System. In Proceedings of the PES T D 2012, Orlando, FL, USA, 7–10 May 2012; pp. 1–6. [Google Scholar]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Sadollah, A. Introductory Chapter: Which Membership Function is Appropriate in Fuzzy System? In Fuzzy Logic Based in Optimization Methods and Control Systems and its Applications; InTech: London, UK, 2018. [Google Scholar]
- Mamdani, E.H. Application of Fuzzy Algorithms for Control of Simple Dynamic Plant. Proc. Inst. Electr. Eng. 1974, 121, 1585–1588. [Google Scholar] [CrossRef]
- Bose, B.K. Modern Power Electronics and AC Drives; Prentice Hall PTR: Hoboken, NJ, USA, 2002. [Google Scholar]
- Kundur, P. Power System Stability & Control; McGraw-Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
- Hazari, M.R.; Mannan, M.A.; Muyeen, S.M.; Umemura, A.; Takahashi, R.; Tamura, J. Stability Augmentation of a Grid-Connected Wind Farm by Fuzzy-Logic-Controlled DFIG-Based Wind Turbines. Appl. Sci. 2018, 8, 20. [Google Scholar] [CrossRef] [Green Version]
- Mahmud, S.M.I.; Abdul Mannan, M.; Hazari, M.R. Design and Performance Analysis of a PV Control Scheme to Improve LVRT of Hybrid Power System. AIUB J. Sci. Eng. 2021, 20, 20–26. [Google Scholar]
- Yagami, M.; Shibata, S.; Murata, T.; Tamura, J. An Analysis of Superconducting Fault Current Limiter for Stabilization of Synchronous Generators in Multi-Machine System. IEEJ Trans. Power Energy 2003, 123, 133–142. [Google Scholar] [CrossRef] [Green Version]
- Hazari, M.R.; Jahan, E.; Hossain, C.A.; Abdul Mannan, M.; Umemura, A.; Takahashi, R.; Tamura, J. Stabilization Control of Power System with Large-Scale Wind Farm by Using DFIG Considering Grid Codes. In Proceedings of the 2019 International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Dhaka, Bangladesh, 10–12 January 2019; pp. 102–107. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parmameter | Value |
|---|---|
| Pmax (maximum power) | 50 MW |
| Vmp (voltage at maximum power) | 973.1 V |
| Imp (current at maximum power) | 51440 A |
| Nm (series-connected module in a string) | 37 |
| Np (number of parallel-connected strings) | 6760 |
| Rs (series resistance per cell) | 0.344 Ω |
| Rp (parallel resistance per cell) | 150.69 Ω |
| ΔVd* | d(eId)/dt | |||||
|---|---|---|---|---|---|---|
| NB | NS | Z | PS | PB | ||
| eId | NB | PB | PB | PS | PS | Z |
| NS | PB | PS | PS | Z | NS | |
| Z | PS | PS | Z | NS | NS | |
| PS | PS | Z | NS | NS | NB | |
| PB | Z | NS | NS | NB | NB | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hazari, M.R.; Jahan, E.; Mannan, M.A.; Das, N. Transient Stability Enhancement of a Grid-Connected Large-Scale PV System Using Fuzzy Logic Controller. Electronics 2021, 10, 2437. https://doi.org/10.3390/electronics10192437
Hazari MR, Jahan E, Mannan MA, Das N. Transient Stability Enhancement of a Grid-Connected Large-Scale PV System Using Fuzzy Logic Controller. Electronics. 2021; 10(19):2437. https://doi.org/10.3390/electronics10192437
Chicago/Turabian StyleHazari, Md. Rifat, Effat Jahan, Mohammad Abdul Mannan, and Narottam Das. 2021. "Transient Stability Enhancement of a Grid-Connected Large-Scale PV System Using Fuzzy Logic Controller" Electronics 10, no. 19: 2437. https://doi.org/10.3390/electronics10192437