
Adaptive Unsaturated Bistable Stochastic Resonance Multi-Frequency Signals Detection Based on Preprocessing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The SR Algorithm
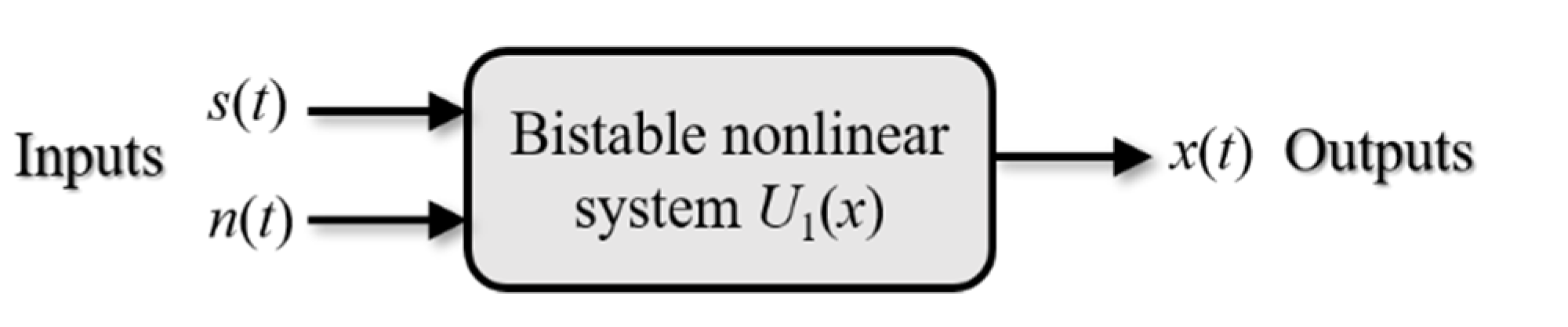
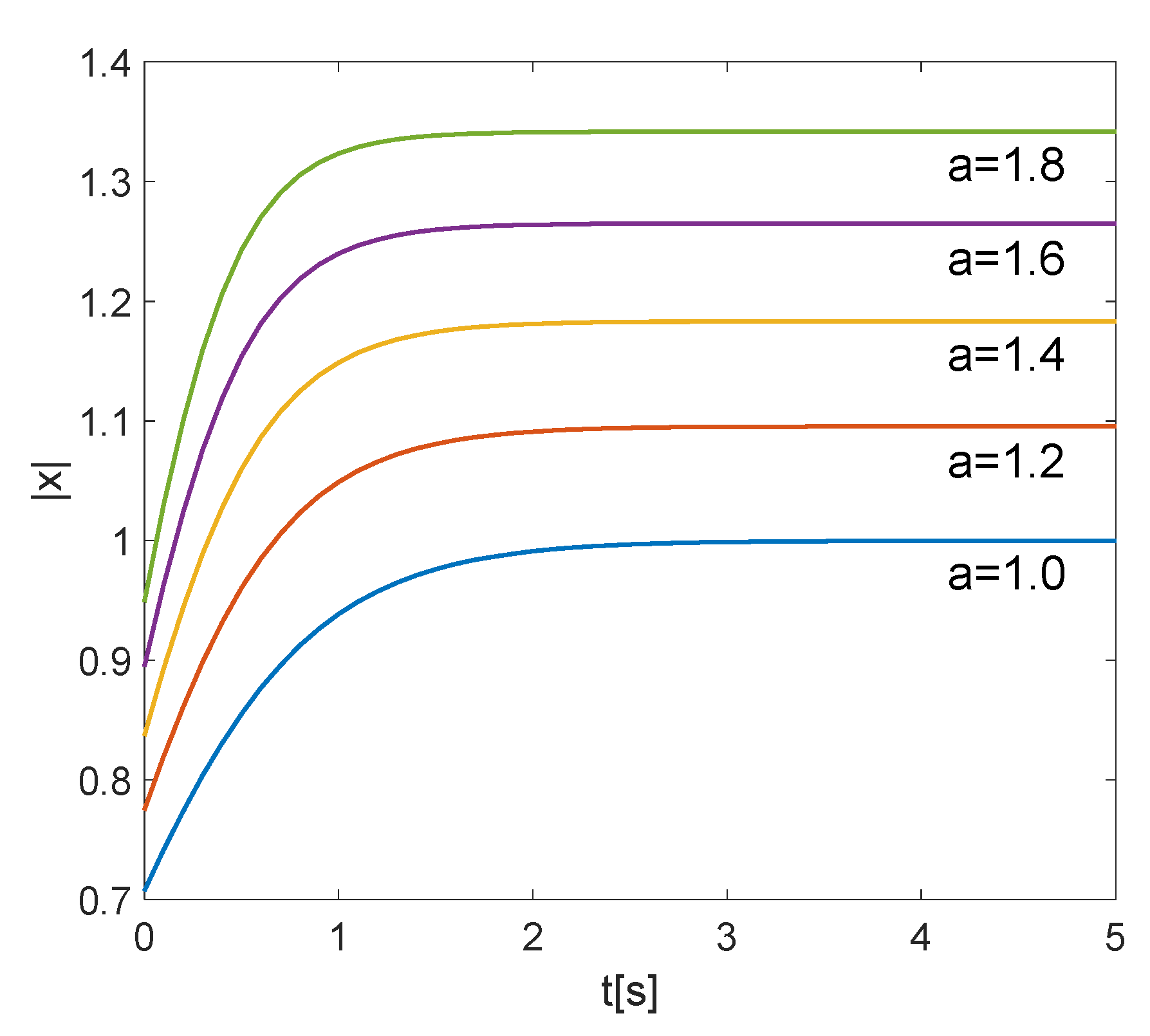
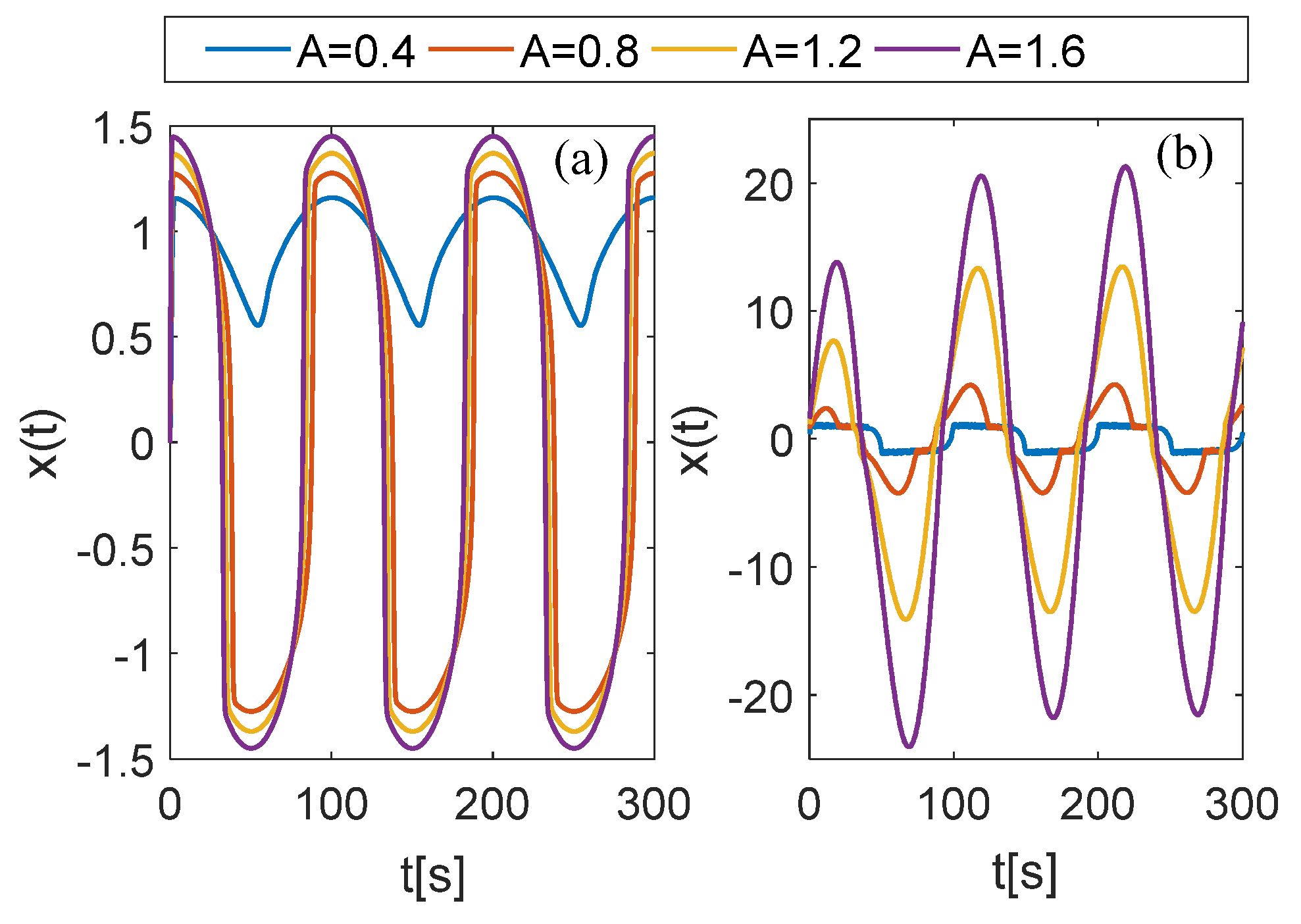
2.1. Classical SR and Output Saturation
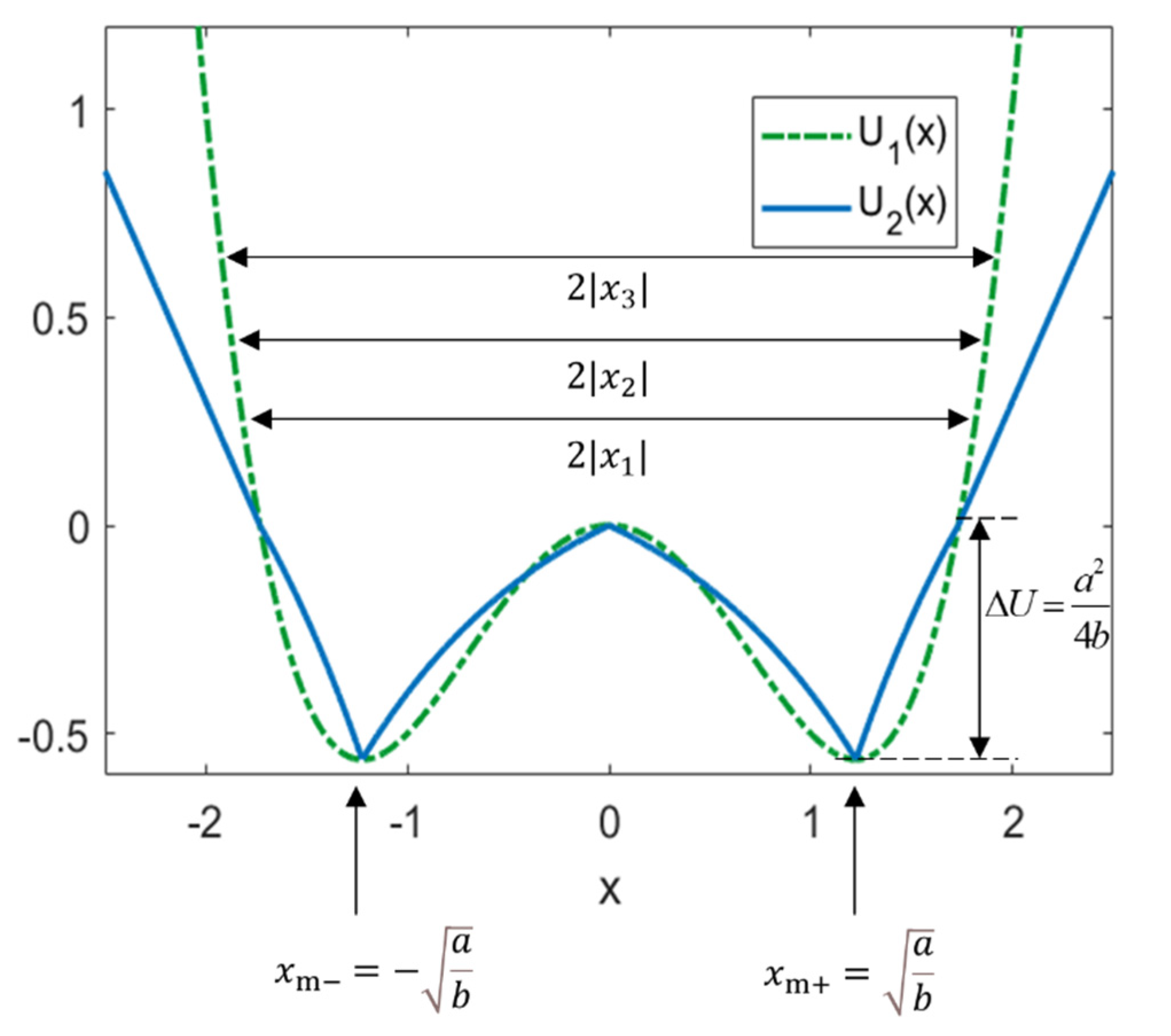
2.2. UBSR
2.3. AUBSR
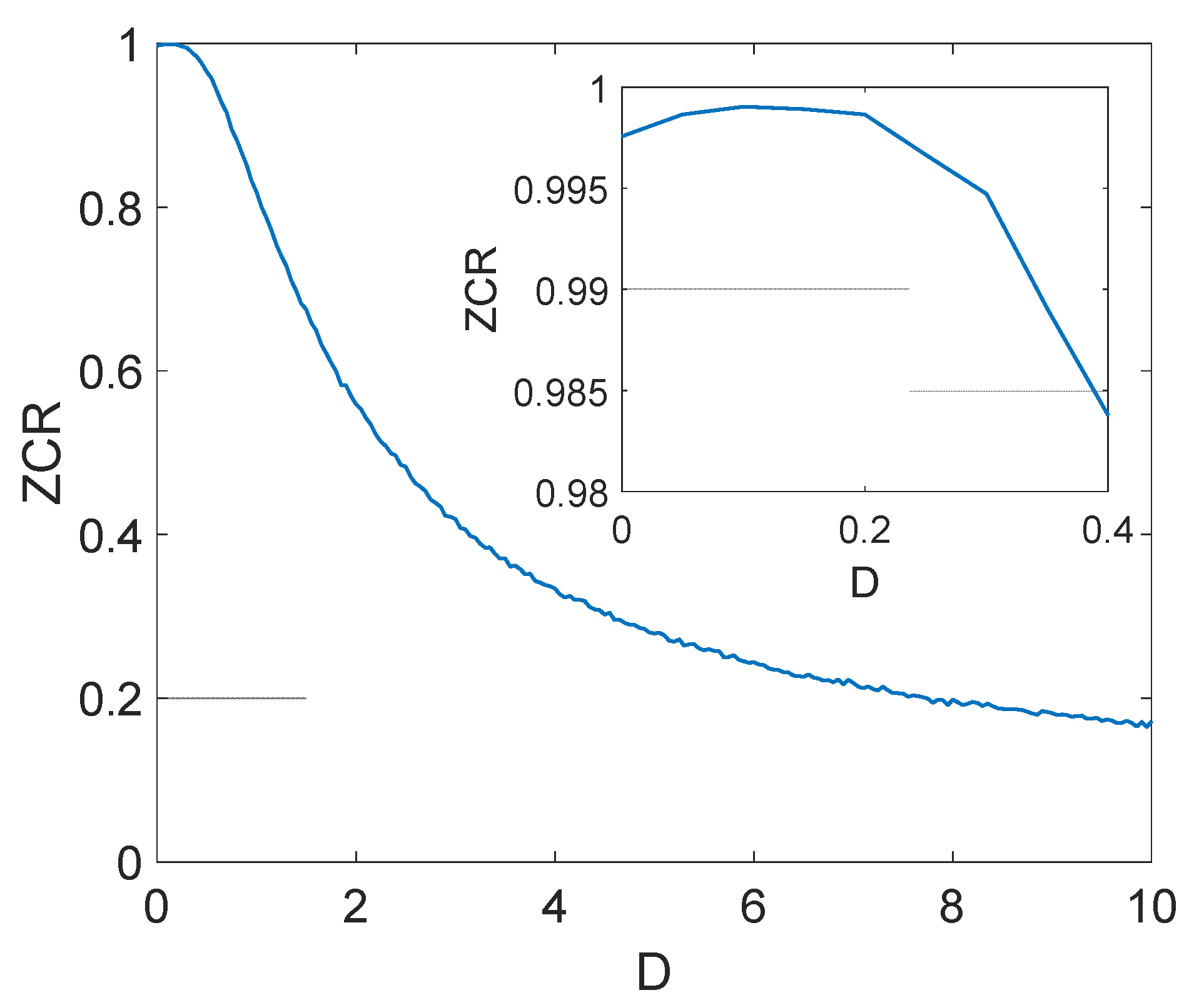
| Algorithm 1. ZCR. |
| (1) Find the zero-crossing pairs from the output sequence subject to . |
| where is the number of data pairs; |
| (2) Calculate the location of the zero point between the pairs using linear interpolation. |
| where is the location corresponding to and denotes the sampling frequency; |
| (3) Calculate the zero-crossing spacing, , as follows: |
| . |
| (4) Remove the pseudo-zero-crossing points when satisfies the following conditions |
| where is the frequency at the highest spectrum peak of the output signal, and the expected is . is an adjustable parameter, and the range is between 0 and 1. |
| (5) Calculate the ZCR as follows: |
| where is the actual zero-crossing point, which can be calculated by removing the pseudo-zero-crossing points. |
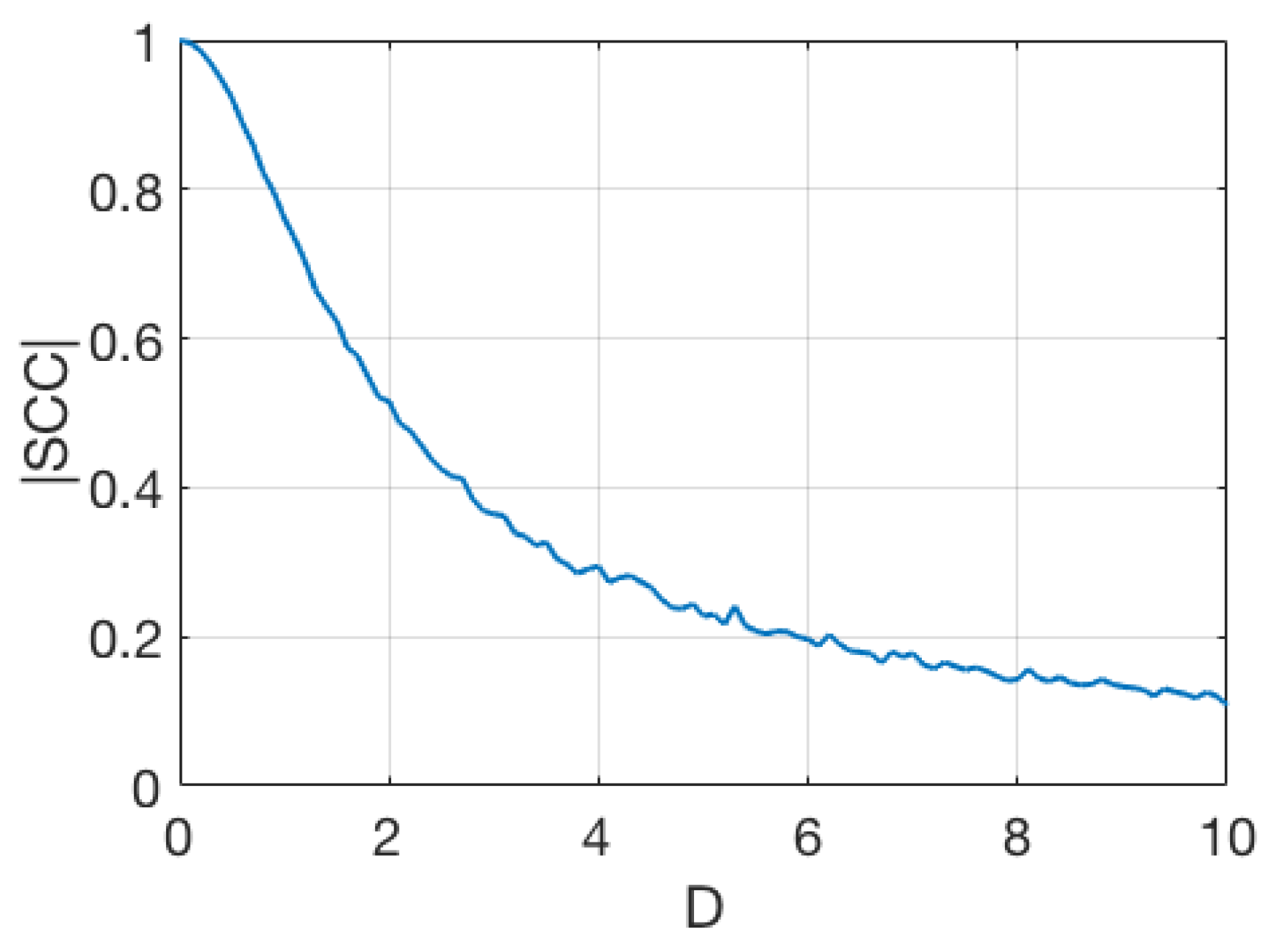
| Algorithm 2. SCC. |
| (1) Calculate the frequency spectrum of the target signal and the output signal with a Fourier transform to obtain and . |
| (2) Calculate the SCC as follows: |
| where and are the statistical mean values of and , respectively. |
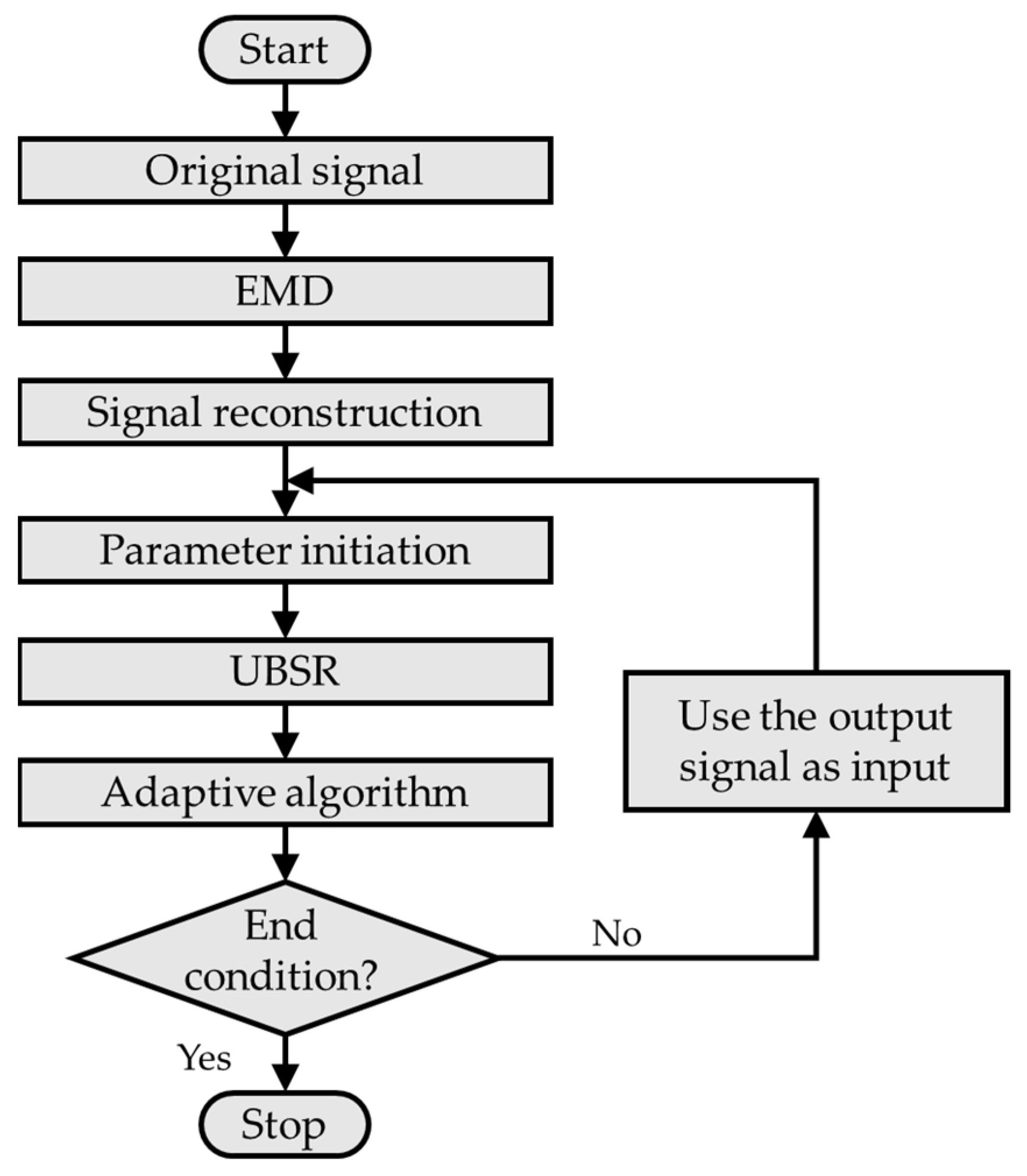
3. EMD-AUBSR
- (1)
- Original Signal:
- (2)
- EMD:
- The numbers of zero-crossings and extreme points of the entire signal are equal or differ by at most 1;
- At any point of the signal, the mean value of the envelope is composed of local maximum points, and the local minimum point is equal to zero.
| Algorithm 3. EMD. |
| (1) Obtain the local maximum points and the minimum points of the signal in the time domain. We obtain the upper envelope and the lower envelope using the cubic spline interpolation. Calculate the mean value of the envelope as follows: |
| (2) Calculate . Discontinue this step if meets the two conditions of IMF. Otherwise, let be equal to the last output and repeat equation times until meets the conditions. |
| (3) Let . Calculate the residual signal |
| (4) Repeat steps (1) to (3) until the final sequence meets terminate condition |
| . |
| (5) The results of EMD can be expressed as |
- (3)
- AUBSR
4. Experimental Results and Analysis
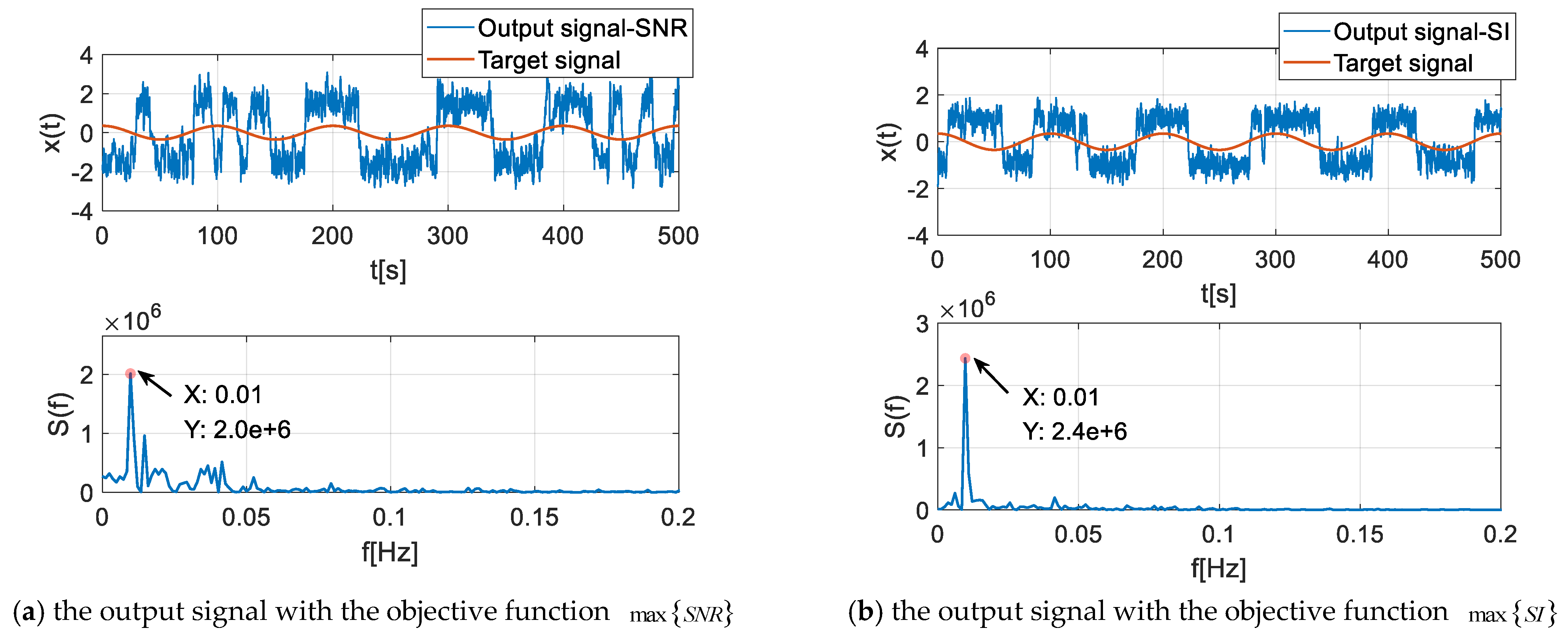
4.1. Single-Frequency Weak Signal Detection
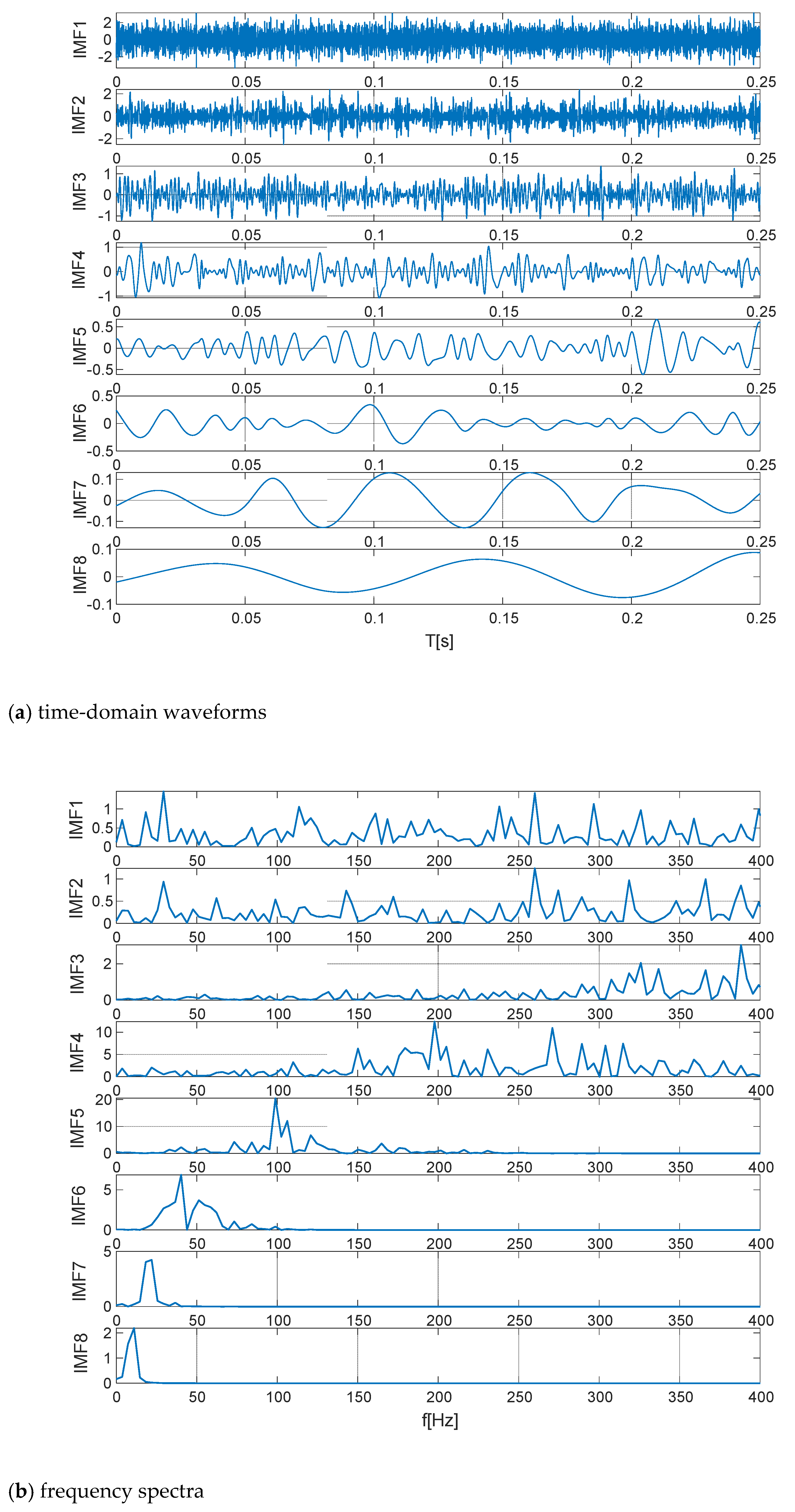
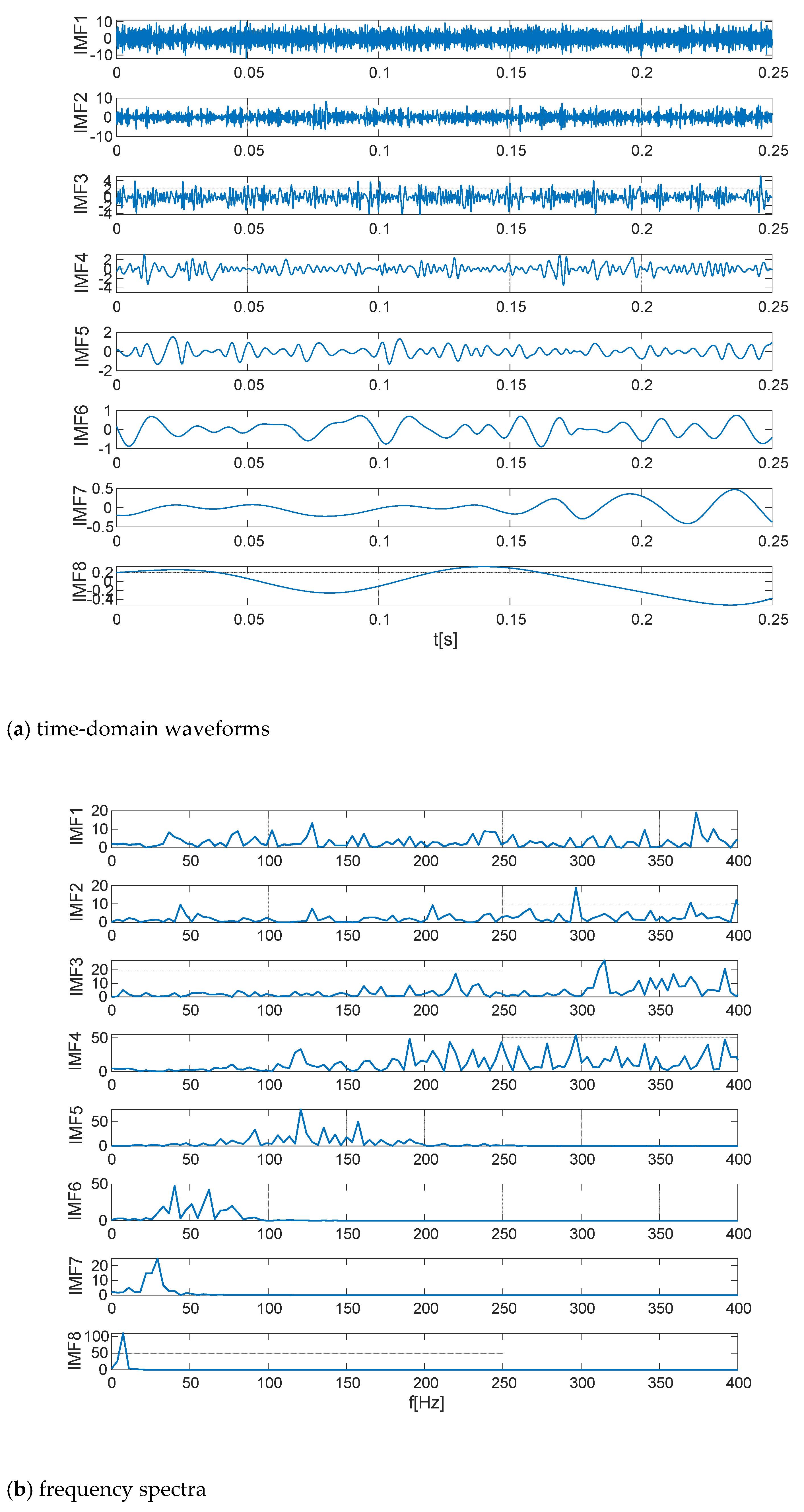
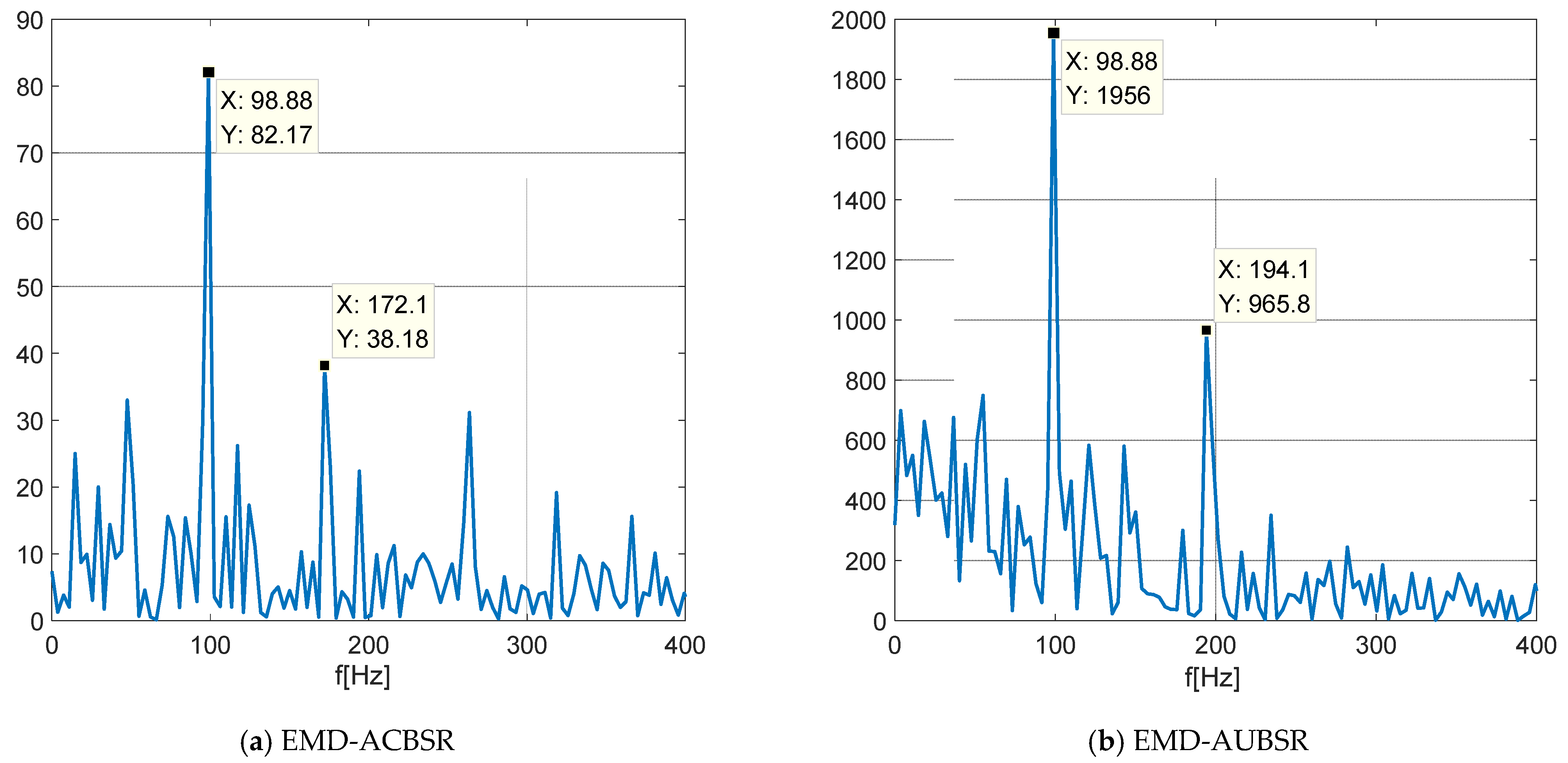
4.2. Multi-Frequency Weak Signals Detection
5. Conclusions
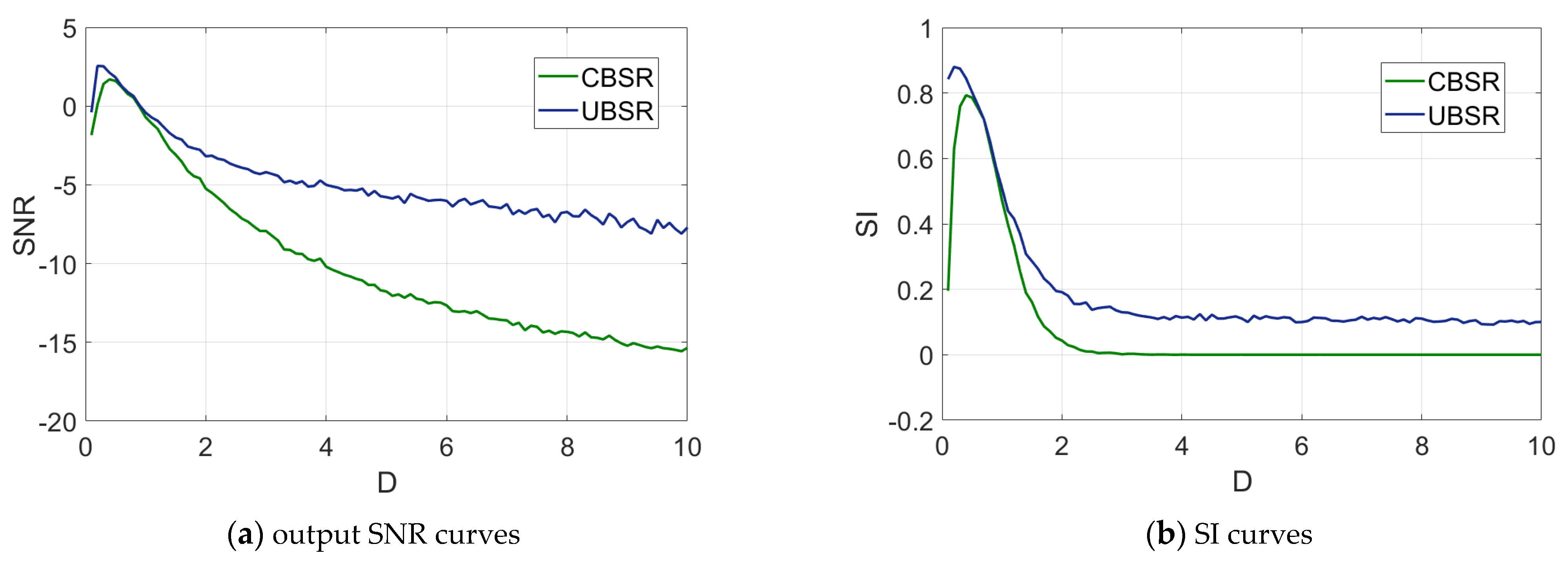
- For the inherent output saturation of CBSR, we designed an unsaturated potential function structure to overcome this defect and built an SI to measure algorithm performance accurately in AUBSR.
- EMD can detect multi-frequency signals when the noise intensity is low, but mode aliasing occurs when the noise is strong. We constructed EMD-AUBSR due to the advantages of UBSR to decrease mode mixing of EMD. The experimental results prove this aspect.
- EMD-AUBSR is effective for detecting multi-frequency signals under strong noise, whereas EMD and AUBSR alone cannot.
Author Contributions
Funding
Conflicts of Interest
References
- He, K.; Xia, Z.; Si, Y.; Lu, J. Noise reduction of welding crack AE Signal based on EMD and wavelet packet. Sensors 2020, 20, 761. [Google Scholar] [CrossRef] [Green Version]
- Shi, H.; Guo, J.; Yuan, Z.; Liu, Z. Incipient fault detection of rolling element bearings based on deep EMD-PCA algorithm. Shock. Vib. 2020, 2020, 8871433. [Google Scholar] [CrossRef]
- Abbate, A.; Koay, J.; Frankel, J.; Schroeder, S.C.; Das, P. Signal detection and noise suppression using a wavelet transform signal processor: Application to ultrasonic flaw detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 14–26. [Google Scholar] [CrossRef] [PubMed]
- Qin, Y.; Tang, B.; Wang, J. Higher-density dyadic wavelet transform and its application. Mech. Syst. Signal Process. 2010, 24, 823–834. [Google Scholar] [CrossRef]
- Cheng, Y.; Chang, Q. A coarse-to-fine adaptive Kalman filter for weak GNSS signals carrier tracking. IEEE Commun. Lett. 2019, 23, 2348–2352. [Google Scholar] [CrossRef]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A Math. Gen. 1981, 14, 453–457. [Google Scholar] [CrossRef]
- Hari, V.; Anand, G.; Premkumar, A.B.; Madhukumar, A. Design and performance analysis of a signal detector based on suprathreshold stochastic resonance. Signal Process. 2012, 92, 1745–1757. [Google Scholar] [CrossRef]
- Wang, S.; Wang, F.; Wang, S.; Li, G. Detection of multi-frequency weak signals with adaptive stochastic resonance system. Chin. J. Phys. 2018, 56, 994–1000. [Google Scholar] [CrossRef]
- McNamara, B.; Wiesenfeld, K. Theory of stochastic resonance. Phys. Rev. A 1989, 39, 4854–4869. [Google Scholar] [CrossRef]
- He, Q.B.; Wang, J. Effects of multiscale noise tuning on stochastic resonance for weak signal detection. Digit. Signal Process. 2012, 22, 614–621. [Google Scholar] [CrossRef]
- Ren, R.B.; Luo, M.K.; Deng, K. Stochastic resonance in a fractional oscillator subjected to multiplicative trichotomous noise. Nonlinear Dyn. 2017, 90, 370–390. [Google Scholar] [CrossRef]
- Shi, P.; Yuan, D.; Han, D.; Zhang, Y.; Fu, R. Stochastic resonance in a time-delayed feedback tristable system and its application in fault diagnosis. J. Sound Vib. 2018, 424, 1–14. [Google Scholar] [CrossRef]
- Qin, Y.; Tao, Y.; He, Y.; Tang, B. Adaptive bistable stochastic resonance and its application in mechanical fault feature extraction. J. Sound Vib. 2014, 33, 7386–7400. [Google Scholar] [CrossRef]
- Liu, X.; Liu, H.; Yang, J.; Litak, G.; Cheng, G.; Han, S. Improving the bearing fault diagnosis efficiency by the adaptive stochastic resonance in a new nonlinear system. Mech. Syst. Signal Process. 2017, 96, 58–76. [Google Scholar] [CrossRef]
- Zhou, P.; Lu, S.; Liu, F.; Liu, Y.; Li, G.; Zhao, J. Novel synthetic index-based adaptive stochastic resonance method and its application in bearing fault diagnosis. J. Sound Vib. 2017, 391, 194–210. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Li, M.; Zhang, Y. A novel adaptive stochastic resonance method based on coupled bistable systems and its application in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2019, 114, 128–145. [Google Scholar] [CrossRef]
- Xu, B.; Li, J.; Duan, F.; Zheng, J. Effects of colored noise on multi-frequency signal processing via stochastic resonance with tuning system parameters. Chaos Solitons Fractals 2003, 16, 93–106. [Google Scholar] [CrossRef]
- Lu, Z.; Yang, T.; Zhu, M. Study of the method of multi-frequency signal detection based on the adaptive stochastic resonance. Abstr. Appl. Anal. 2013, 2013, 360–374. [Google Scholar] [CrossRef] [Green Version]
- Shi, P.; Ding, X.; Han, D. Study on multi-frequency weak signal detection method based on stochastic resonance tuning by multi-scale noise. Measurement 2014, 47, 540–546. [Google Scholar] [CrossRef]
- Gong, S.; Li, S.; Wang, H.; Ma, H.; Yu, T. Multi-frequency weak signal detection based on wavelet transform and parameter selection of bistable stochastic resonance model. J. Vib. Eng. Technol. 2021, 1–20. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. A comparative analysis of signal decomposition techniques for structural health monitoring on an experimental benchmark. Sensors 2021, 21, 1825. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2011, 1, 1–41. [Google Scholar] [CrossRef]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Marchesoni, F.; Menichella-Saetta, E.; Santucci, S. Stochastic Resonance in Bistable Systems. Phys. Rev. Lett. 1989, 62, 349–352. [Google Scholar] [CrossRef]
- Leng, Y.; Leng, Y.; Wang, T.; Guo, Y. Numerical analysis and engineering application of large parameter stochastic resonance. J. Sound Vib. 2006, 292, 788–801. [Google Scholar] [CrossRef]
- Xiao, K.; Zhou, Z. The EMD based on adaptive stochastic resonance for weak signal detection. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 2153–2157. [Google Scholar]
- Li, G.; Li, J.; Wang, S.; Chen, X. Quantitative evaluation on the performance and feature enhancement of stochastic resonance for bearing fault diagnosis. Mech. Syst. Signal Process. 2016, 81, 108–125. [Google Scholar] [CrossRef]
- Jiao, S.; Jiang, W.; Lei, S.; Huang, W. Research on detection method of multi-frequency weak signal based on stochastic resonance and chaos characteristics of duffing system. Chin. J. Phys. 2019, 64, 333–347. [Google Scholar]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, L.; Yang, J.; Wang, L.; Liu, H. Adaptive Unsaturated Bistable Stochastic Resonance Multi-Frequency Signals Detection Based on Preprocessing. Electronics 2021, 10, 2055. https://doi.org/10.3390/electronics10172055
Cui L, Yang J, Wang L, Liu H. Adaptive Unsaturated Bistable Stochastic Resonance Multi-Frequency Signals Detection Based on Preprocessing. Electronics. 2021; 10(17):2055. https://doi.org/10.3390/electronics10172055
Chicago/Turabian StyleCui, Lin, Junan Yang, Lunwen Wang, and Hui Liu. 2021. "Adaptive Unsaturated Bistable Stochastic Resonance Multi-Frequency Signals Detection Based on Preprocessing" Electronics 10, no. 17: 2055. https://doi.org/10.3390/electronics10172055