1. Introduction
With an increased demand for electronics products nowadays, the complexity of chip design in high-end electronics systems has also increased. To integrate many circuits with different functions into a single chip, the system-on-chip (SoC) implementation method is widely used in modern chip design. Currently, the improvement of semiconductors has significantly advanced the performance of chips. Thus, the operating clock frequency of systems can reach the gigahertz level. However, systems functioning at such high performance with complex SoC design can encounter several challenges. One such challenge is the delay uncertainties, such as propagation delay mismatching, clock jitter and clock skew, that degrade overall system performance and increase design efforts to meet the timing constraints. Because a large number of circuits with different functions are integrated into the SoC, these problems become significantly more serious. Additionally, the delay of the timing-critical path in the system changes due to variation in the operating environment. However, with the increased frequency of the operating clock, the time margins of the high-performance SoC become smaller, reducing the stability and performance of the chip, and can cause malfunction [
1,
2,
3]. Furthermore, negative bias temperature instability (NBTI), hot career injection (HCI), and electromigration (EM) will also induce serious reliability issues after shipment [
4]. Consequently, to ensure the functionality and performance of high-performing systems, it is necessary to develop a technology that monitors either the delay in the critical path or timing uncertainty in the circuit [
1,
2,
3,
4,
5,
6,
7,
8].
Second, because SoC has high circuit complexity, reducing overall power consumption has been an important issue in SoC design. In addition to reducing the power consumption of individual functional blocks through low-power design, using a dynamic voltage and frequency scaling (DVFS) scheme to adjust the voltage and operating frequency of specified functional blocks is a common low-power design technique in SoC [
9,
10]. In the DVFS technique, the main role of a timing monitor is to measure the specified timing-critical path delay in a digital block and provide such delay information to the frequency/voltage controller. Based on the measured delay provided by the timing monitor, the DVFS controller can adjust the operating frequency and supply voltage to reduce power consumption. For example, if the delay of the specified timing-critical path is larger than the system requirement, the system can decrease the operating voltage to reduce the power consumption. Conversely, if the delay of the specified timing-critical path is smaller than the system requirement, the system will increase the operating voltage to ensure the functionality of system. In the DVFS system, it is widely used a critical path replica circuit to track the delay of timing-critical path at different supply voltage [
9,
10,
11]. Therefore, the timing monitor usually measures the delay of the critical path replica circuit. Since providing accurate timing information is key to whether DVFS can effectively reduce SoC power consumption while maintaining the functional operation, designing related monitoring circuits is crucial for SoC design.
To overcome the two aforementioned SoC design challenges, the chip should be able to monitor the critical timing.
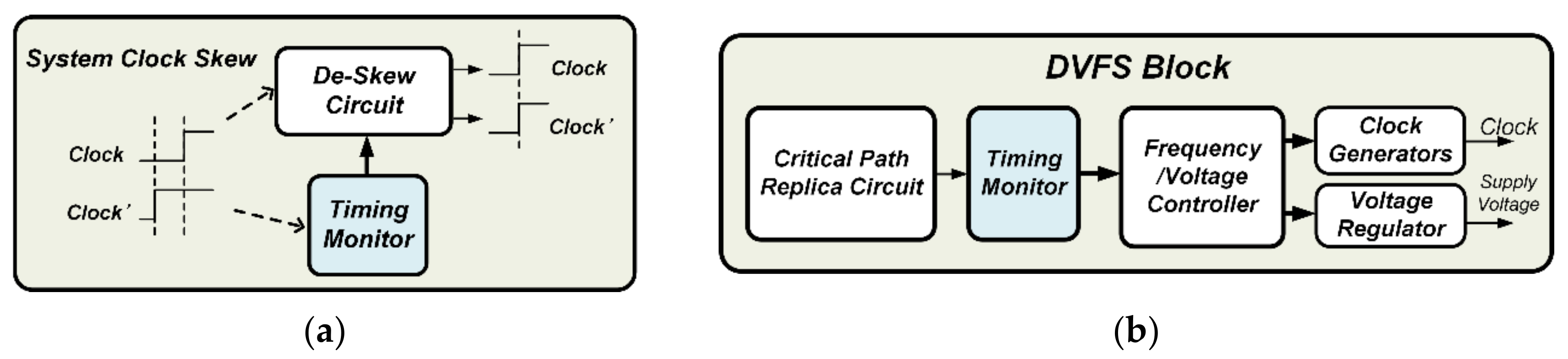
Figure 1 illustrates the role of the timing monitor in SoC. The timing-monitor monitors the timing status of specific signals in the chip, observes situations of uncertain timing, and returns the monitoring results to the control circuit of the system, which in turn prompts corresponding responses to reduce or remove the impact of timing uncertainty on the functionality of the system. For example, if the system clock skew occurs when the clock propagation delay mismatching, the timing-monitor measures and sends the phase difference between the two clock signals to the de-skew circuit to adjust the clock timing and reduce the impact of mismatched transmission delay, as shown in
Figure 1a. The timing monitor is also employed in the DVFS scheme. Through the delay measurement of the critical path replica circuit, it provides the information required to adjust the voltage/frequency of the specified block to achieve the DVFS, as shown in
Figure 1b. Therefore, the timing monitor is an indispensable circuit in high-performance SoC design.
Different approaches have been developed to implement a timing monitor. The simplest and most common design is the use of the delay of delay element as the monitoring resolution. The start signal propagates in the successive delay elements and the stop signal registers the state of the delay elements, which reveals the number of elements between the start and stop [
12]. This design concept is very straightforward; however, its quantization resolution is limited by the delay element that is not sufficient for advance system applications. In order to improve the monitoring resolution, the Vernier delay line (VDL) structure has been proposed to achieve high delay resolution. However, such circuits have large hardware costs, and their delay resolutions are sensitive to supply-voltage variations [
13]. To improve monitoring resolution and range, the structure that combines a pseudo-differential ring oscillator and a counter has been proposed [
14,
15]. This design can provide better monitoring resolution and range; however, the monitoring resolution is sensitive to PVT variation. Ref. [
5] uses a cascading structure to improve the monitoring resolution, and takes two delay lines to lower the sensitive to supply voltage variations by choosing the suitable the width and length of each metal-oxide-semiconductor (MOS) in two delay lines. However, it is not only hard to obtain the suitable the width and length of MOS, but also hard to lower the sensitive to process and temperature variations.
Most SoC applications require several design considerations for time monitors, including measurement resolution, range, and measurement response time. The measurement resolution and range determine the accuracy and applicable range of the timing measurement results, respectively. Due to differences in the required timing monitor in the system, designing a high measurement resolution and wide range simultaneously is essential. Additionally, since DVFS applications need current timing status, the measurement response rate of the timing monitor is an important basis for judging whether the timing monitor is suitable for SoC applications. Furthermore, if the output results of the timing monitor are affected by process–voltage–temperature (PVT) variations, the reliability and stability of the timing monitor will be degraded. Therefore, this paper proposes a timing monitor that achieves high measurement resolution and wide measurement range, and low PVT variation sensitivity.
This paper is organized as follows:
Section 2 describes the architecture and operating principle of the proposed timing monitor.
Section 3 describes the detailed circuit of each block in the timing monitor.
Section 4 presents chip implementation and experimental results. Finally,
Section 5 is the conclusion.
2. Timing-Monitor Architecture
To achieve a high time-monitoring resolution and range simultaneously, a multi-stage timing-monitor architecture is proposed.
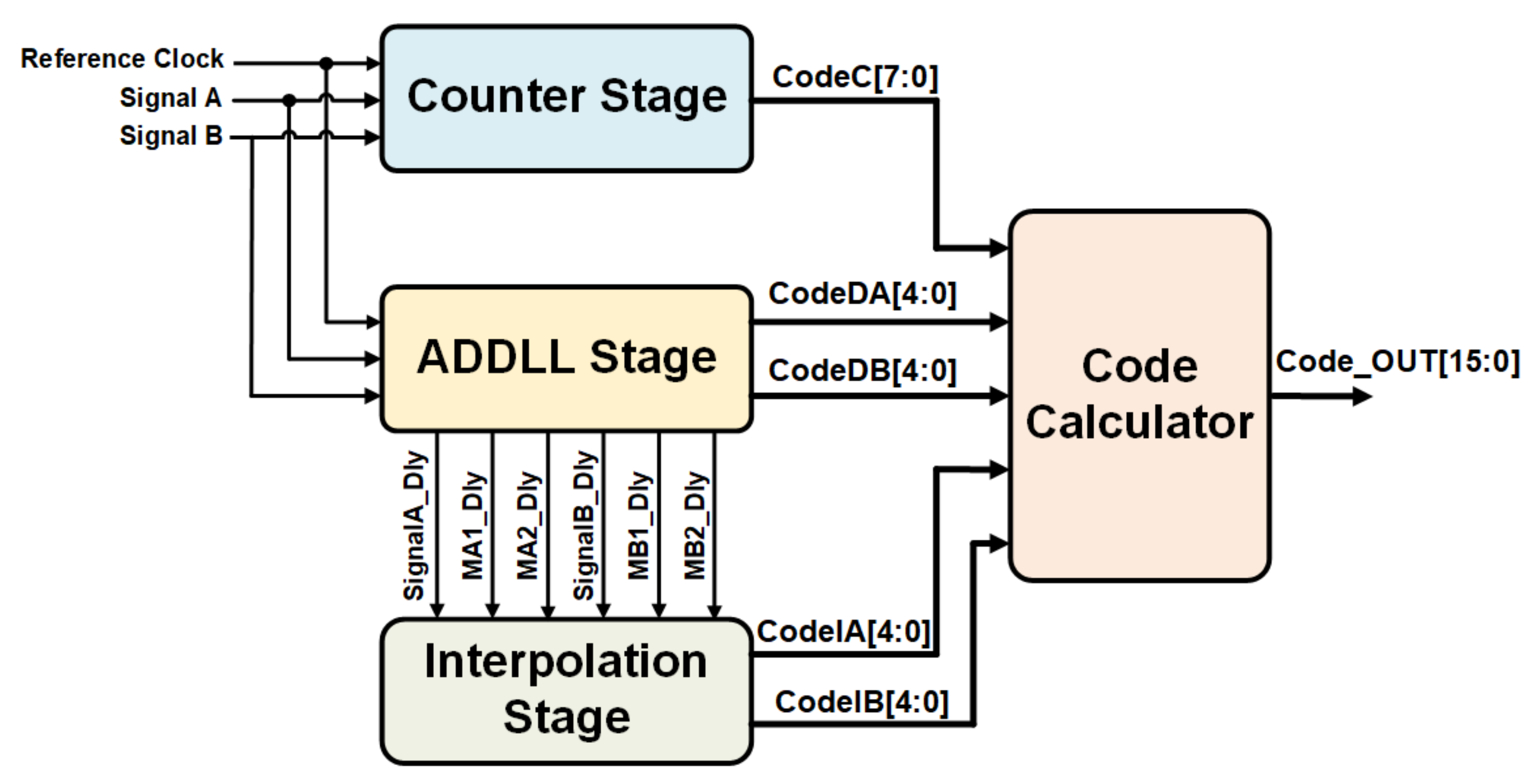
Figure 2 shows the proposed timing-monitor architecture, including a code calculator and three measurement stages, namely, a counter stage, an all-digital delay-locked loop (ADDLL) stage, and an interpolation stage. These three measurement stages each have different measurement resolutions and ranges, and the overall timing-monitoring range can be expanded and resolution effectively improved when properly connected. The counter stage has the widest time-monitoring range, followed by the ADDLL stage and lastly, the interpolation stage. Conversely, the interpolation stage has the highest time-monitoring resolution, followed by the ADDLL stage and then the counter stage.
The concept of a multi-stage timing monitor is speeding the conversion rate by parallel sampling processing while considering the monitoring range and resolution.
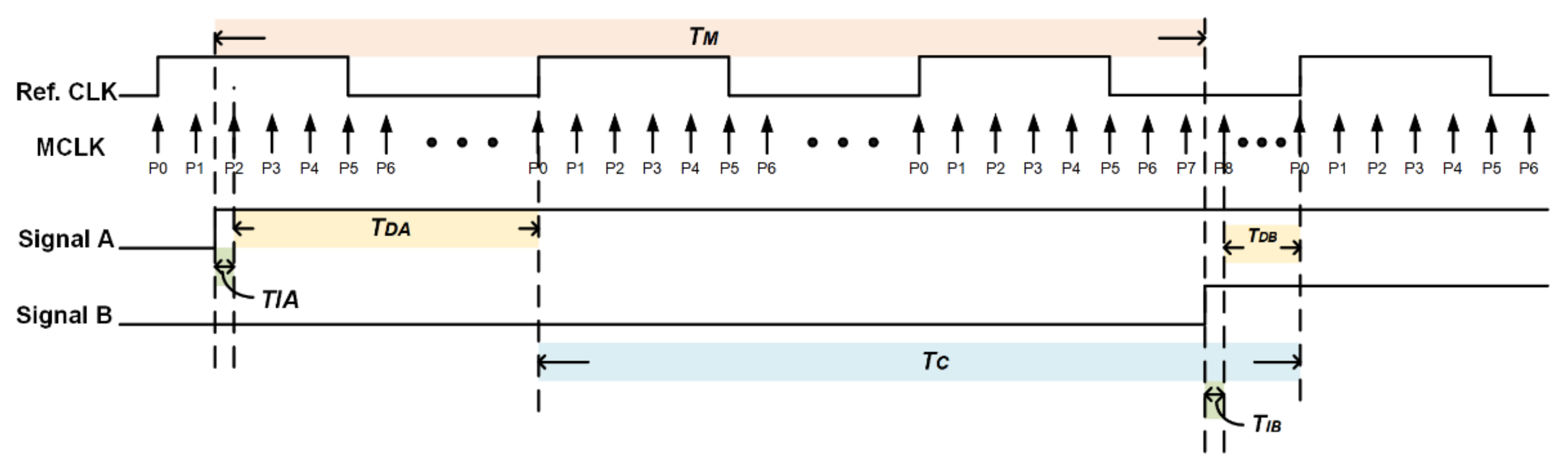
Figure 3 is an operation sequence diagram of the proposed multi-stage timing monitor.
TM is the time interval to be measured and is the time difference between the positive edge of Signal A and the positive edge of Signal B. The counter stage uses the period of the reference clock (
Tref) as the quantization unit to measure
TM.
TC is the time interval measured by the counter stage. The counter stage measures from the first positive edge of the reference clock after the positive edge of Signal A, and ends at the first positive edge of the reference clock after the positive edge of Signal B. Because the positive edges of the reference clock are not aligned with that of Signal A and Signal B,
TM is not equal to
TC.
ADDLL generates multi-phase clock signals (MCLK), and its phase differences are equal and their sum equals
Tref.
TDA is the time interval between the positive edge of the first MCLK after the positive edge of Signal A and the first positive edge of reference clock after the positive edge of Signal A.
TDB is the time interval between the positive edge of the first MCLK after the positive edge of Signal B and the first positive edge of reference clock after the positive edge of Signal B.
TIA is the time interval between the positive edge of Signal A and the positive edge of the first MCLK after the positive edge of Signal A, and
TIB is the time interval between the positive edge of Signal B and the positive edge of the first MCLK after the positive edge of Signal B. Since the time interval to be measured is not the same as the time interval measured by the counter stage, the part (
TDA +
TIA), not measured by the counter stage must be filled and the excesses (
TDB +
TIB) deducted. Thus, the time interval to be measured can be expressed as
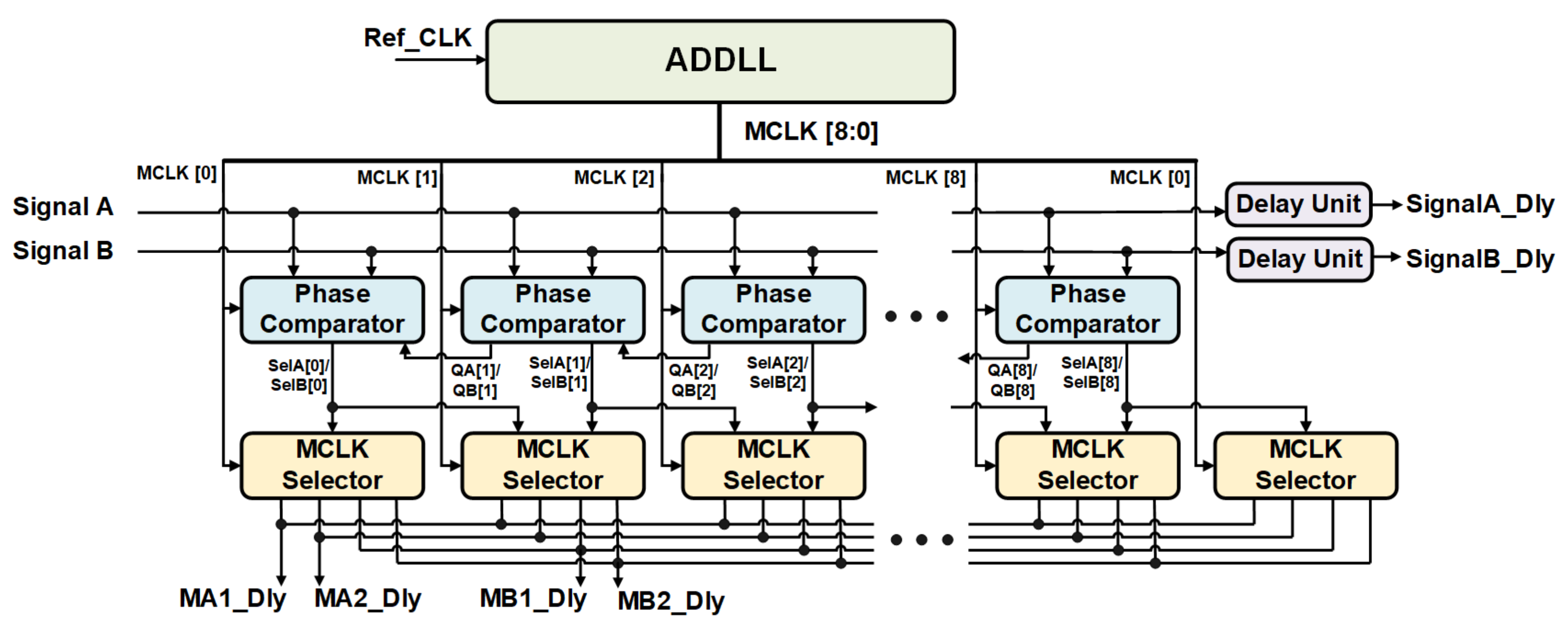
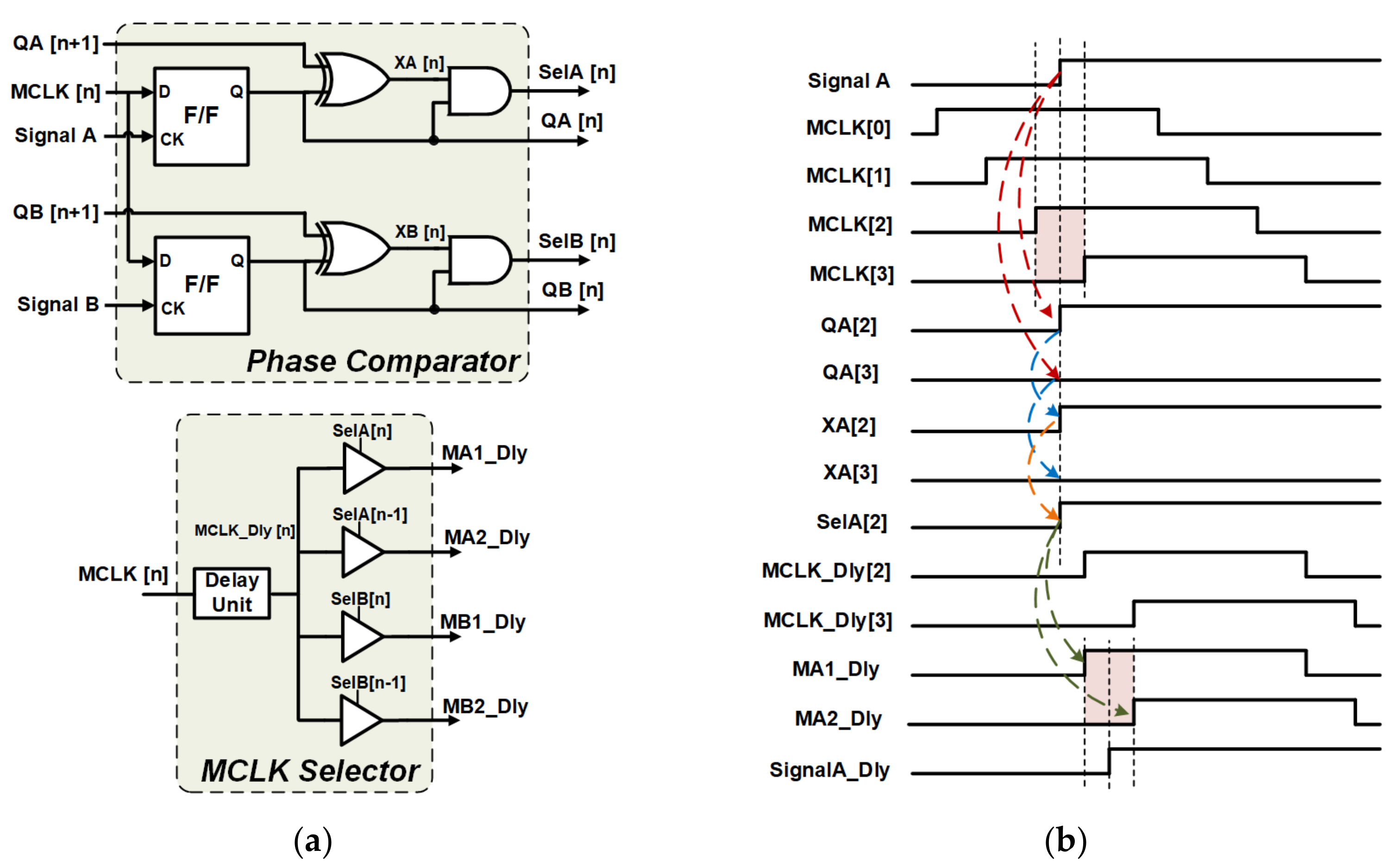
The counter stage measures TC and converts it to output digital code CodeC. TDA and TDB are measured using the ADDLL stage and obtaining the digital codes CodeDA and CodeDB, respectively. TIA and TIB are measured by the interpolation stage and obtaining the digital codes CodeIA and CodeIB, respectively. When all three stages are measured completely, the output codes of each stage are sent to the output code calculator for integrated calculation, and the final output code can be obtained. ADDLL selects two adjacent MCLKs (MA1 and MA2) of the positive edge of Signal A to generate CodeDA. These signals are sent to the interpolation stage for more accurate measurement. Similar to Signal A, ADDLL also selects two adjacent MCLKs (MB1 and MB2) of the positive edge of Signal B to generate CodeDB, and these signals are sent to the interpolation stage for more accurate measurement. However, since the positive edges of Signal A and B only appear one time during the measurement, the interpolation stage cannot measure in time. Therefore, the ADDLL stage retains the time relationship between Signal A, MA1, and MA2 through delay to ensure the correctness of the input signal of the interpolation stage. Signal A_Dly, MA1_Dly, and MA2_Dly are the delay signals corresponding to Signal A, MA1, and MA2, respectively. Similar to Signal B, the ADDLL stage also generates Signal B_Dly, MB1_Dly, and MB2_Dly through an appropriate delay as input signals for the interpolation stage.
Because the first stage uses a counter for measurement, it achieves a wider measurement range by increasing the number of counter bits. Compared with counter and ADDLL stages, the interpolation stage has a higher measurement resolution, and since the measurement resolution of the overall timing monitor is determined by the interpolation stage, the measurement resolution of the timing monitor improves significantly. Therefore, the proposed multi-stage timing monitor achieves high measurement resolution and a wide measurement range concurrently.
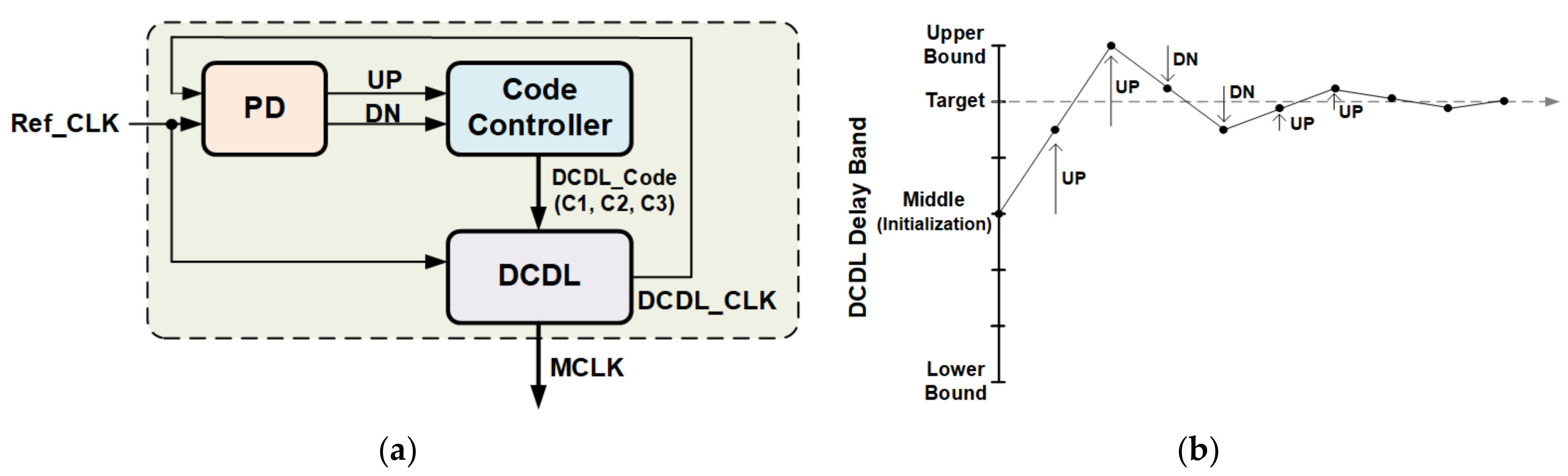
The MCLKs are generated using the digitally-controlled delay line (DCDL) in the ADDLL, and the time interval between two adjacent MCLKs equals the delay of the delay element (DE) in the DCDL. The overall delay of DCDL equals
Tref when ADDLL is locked. If there are
M DEs in the DCDL, the delay of each DE, which is the measurement resolution of the ADDLL stage, is
1/M of
Tref. So long the reference clock cycle remains stable, the delay of the DE does not change due to PVT variations, thus reducing the sensitivity of measurement resolution of ADDLL stage to the environmental variation and its measurement resolution keeps
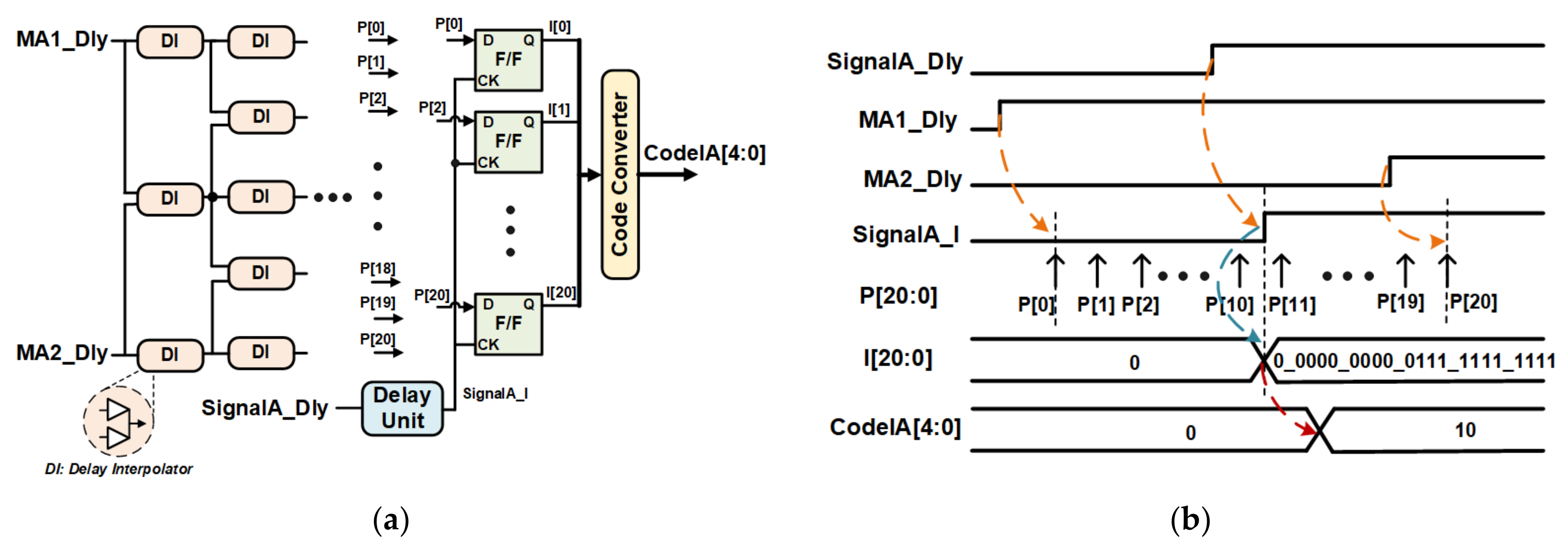
1/M of the counter stage. Furthermore, if the delay of DE is equally divided into
N parts, the measurement resolution of the interpolation stage is one-Nth of the ADDLL stage. Therefore, the overall timing measurement is expressed as
ΔTI is the measurement resolution of the interpolation stage. Added to high measurement resolution and wide measurement range, the measurement resolution of each stage of the proposed architecture is unaffected by PVT variations and can maintain a fixed proportional relationship, effectively reducing the sensitivity of time-monitoring results to environmental variations. The detailed circuit of each stage will be described in the following sections.
4. Experimental Results and Discussion
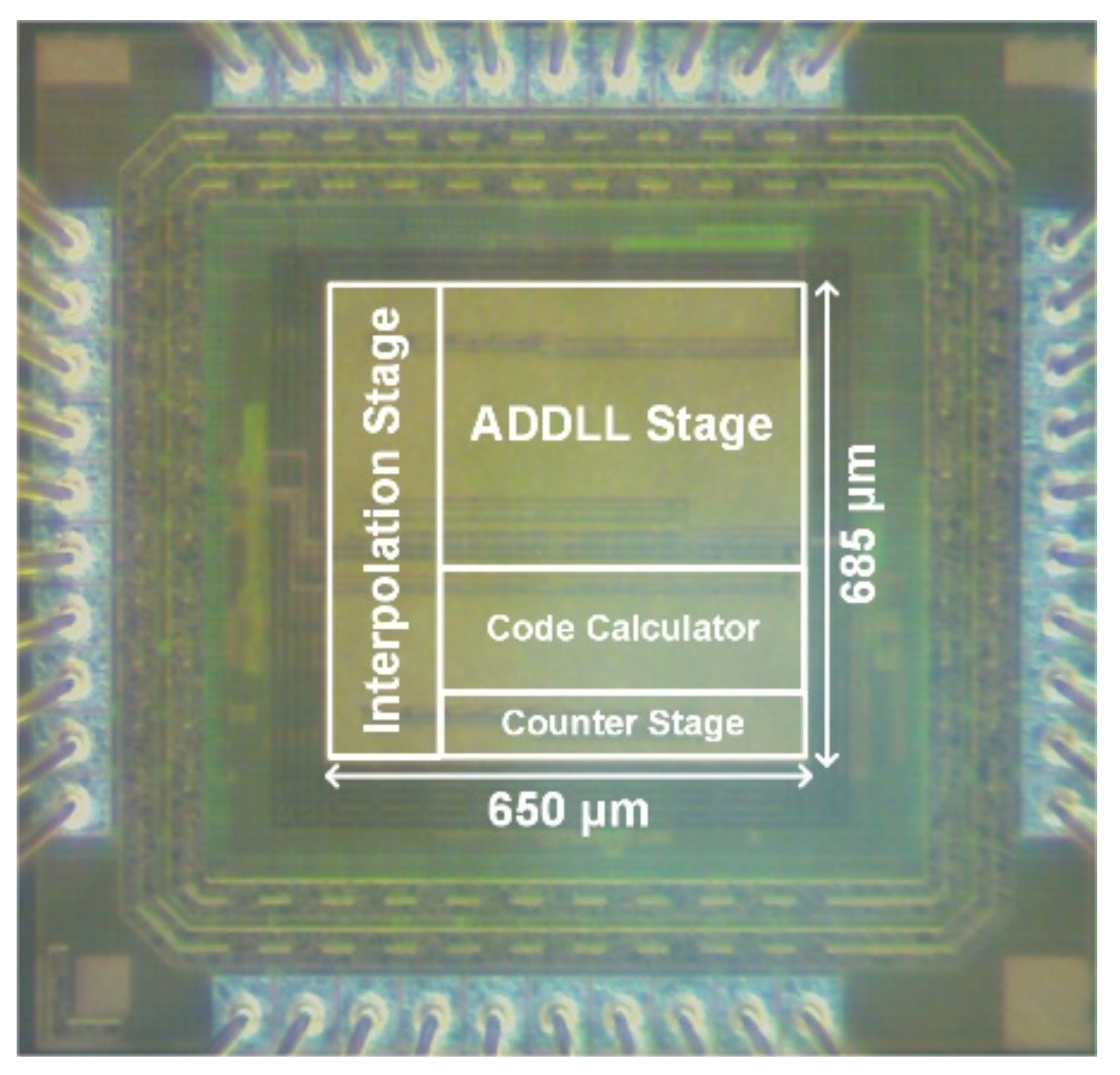
The proposed timing monitor is designed and implemented through the mixed-signal design flow, and fabricated by TSMC 0.18 µm 1P6M CMOS standard process with a core area of 685 µm × 650 µm.
Figure 9 shows the microphotographs of the chip. The post-layout simulation results of the proposed timing monitor verify the relationship between the input time interval and output digital code. The range and resolution of the proposed timing monitor are 2.2 µs and 47 ps, respectively. The power consumption of the timing monitor is 7.58 mW when the reference clock signal frequency is 120 MHz and the operating voltage is 1.8 V.
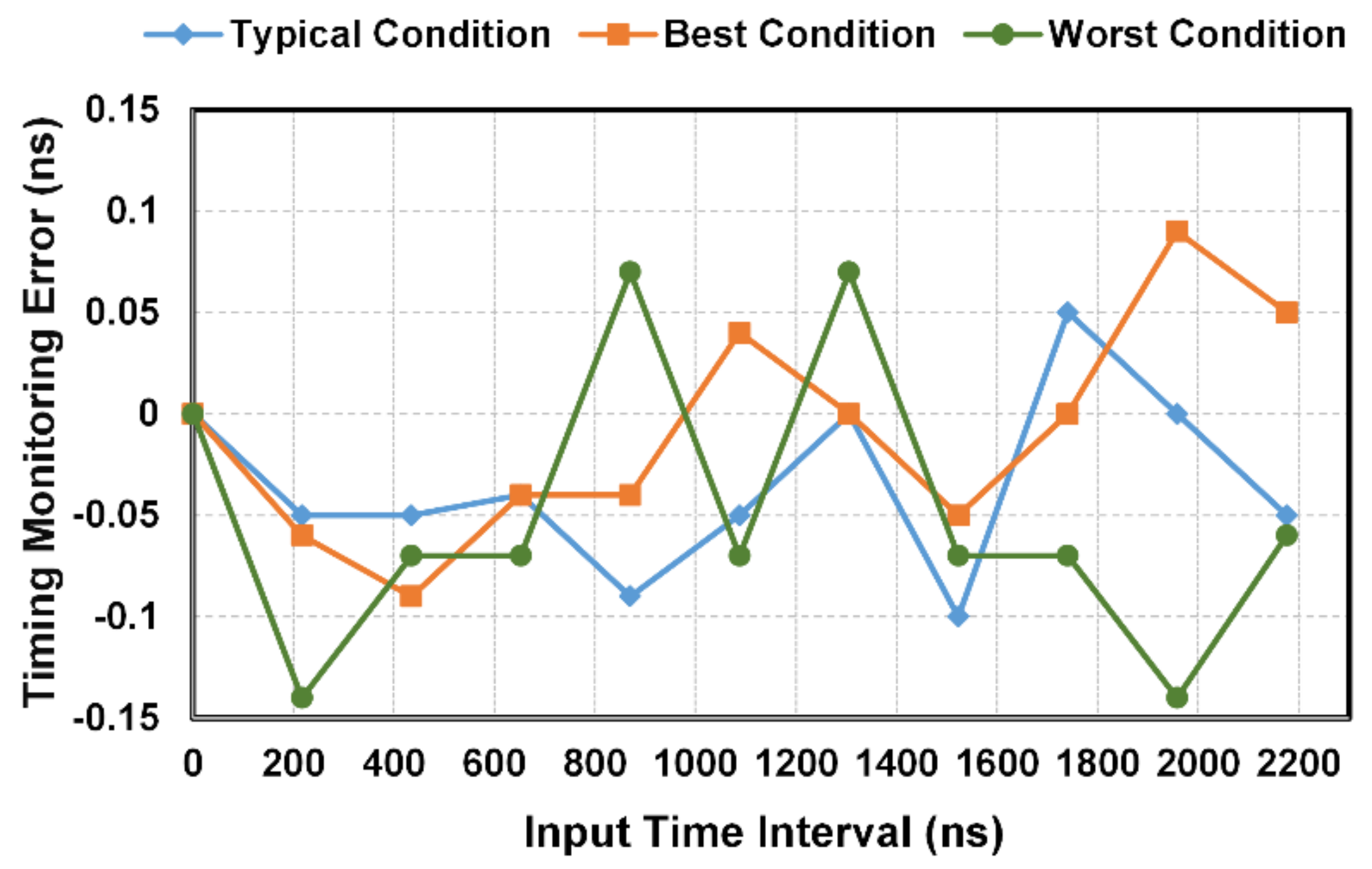
To verify the impact on the output results under different PVT conditions,
Figure 10 shows the timing measurement errors under three operation conditions. The process corner, supply voltage, and operating temperature of the best condition are Fast/Fast, 1.98 V, and −40 °C, respectively. Those for the typical condition are Typical/Typical, 1.8 V, and 25 °C, respectively and for the worst condition, we have Slow/Slow, 1.62 V, and 125 °C, respectively. The maximum monitoring error of the best, typical, and worst conditions is 0.02%, 0.02%, and 0.06%, respectively. Since there is the phase error between reference clock and DCDL output when ADDLL is locked, the monitoring resolution of the ADDLL stage is not equal to
1/M of
Tref. Additionally, the outputs of interpolation stage may be not stable due to the charge and discharge current mismatching of interpolation circuit These errors cause the overall timing monitoring error is not the same with different input time interval.
Table 2 provides the performance comparisons with the state-of-the-art timing-monitor design. From
Table 2, the proposed timing monitor has the best timing-monitoring resolution compared to other designs, and therefore provides more accurate timing measurement results for SoC applications. Additionally, it provides various time monitoring and can be widely used in various time monitoring applications. If the system requires a wider time-monitoring range, it needs only increase the output bit of the counter to meet the requirements of the system. Furthermore, compared with previous designs, it has a lower sensitivity to PVT variations and greatly improves the stability of the output. In sum, the proposed timing monitor not only can provide a finer timing-monitoring resolution and a wider timing-monitoring range but also achieve a lower PVT-variations sensitivity, thus it is suitable for SoC applications.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}