
Modeling and Analysis of Unmanned Aerial Vehicle System Leveraging Systems Modeling Language (SysML)


Abstract
:1. Introduction
- To apply the MBSE approach to provide a standardized model of the design of UAV systems to improve safety, protection, and reduce human error;
- To illustrate the use of the SysML diagram to increase transparency, traceability, and easy understanding of the interaction of elements of UAVs system and subsystems;
- To demonstrate the interoperability of COTS simulation software and the SysML model to verify functional requirements;
- To contribute to the literature on the application of MBSE in UAVs.
2. Related Work
- How can the four pillars of the magic grid approach be applied to unmanned aerial vehicles domain?How to integrate external tool (such as MATLAB and MDAO) with SysML to simulate and optimize any potential parameters of unmanned aerial vehicle?
3. MBSE-Based Modeling Approach
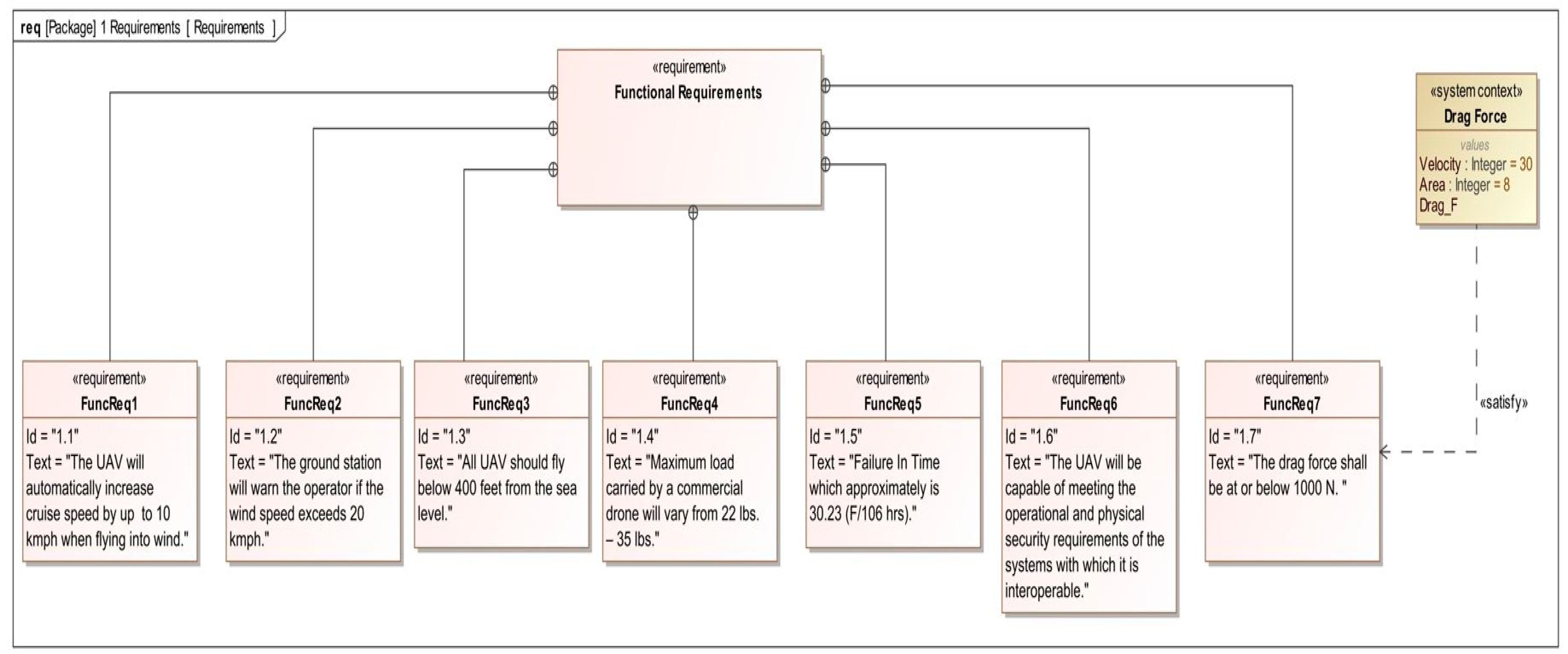
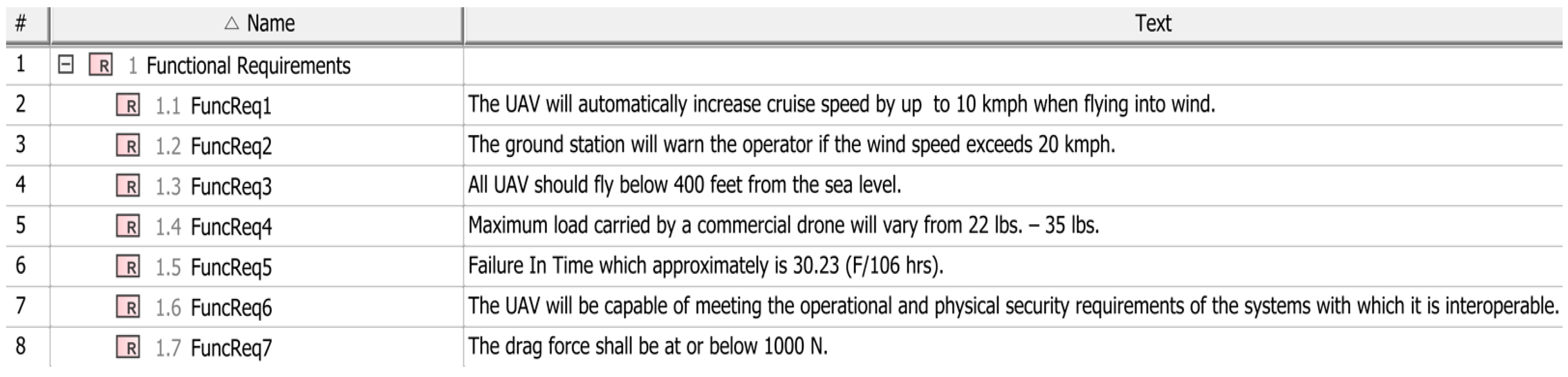
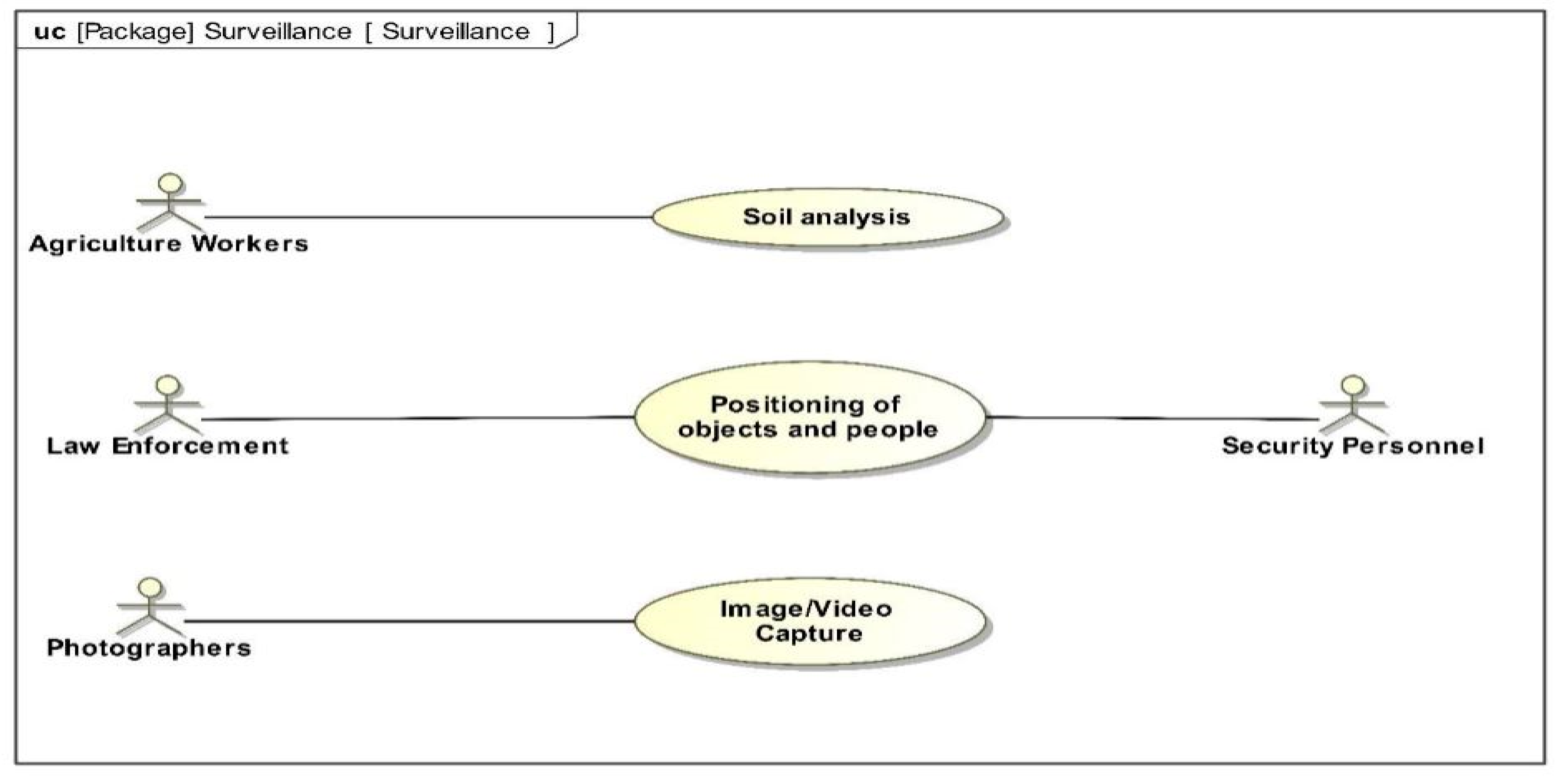
3.1. Development of Requirement Model
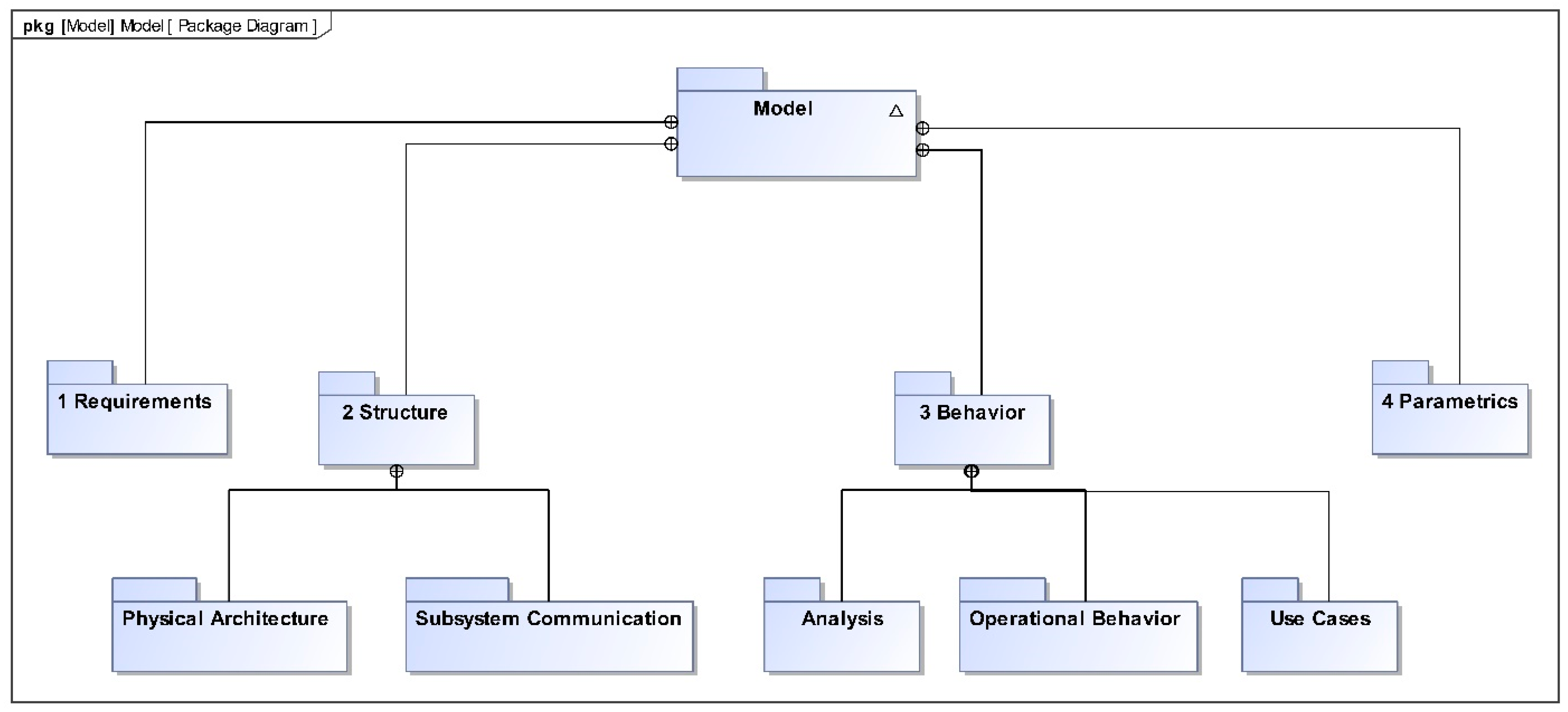
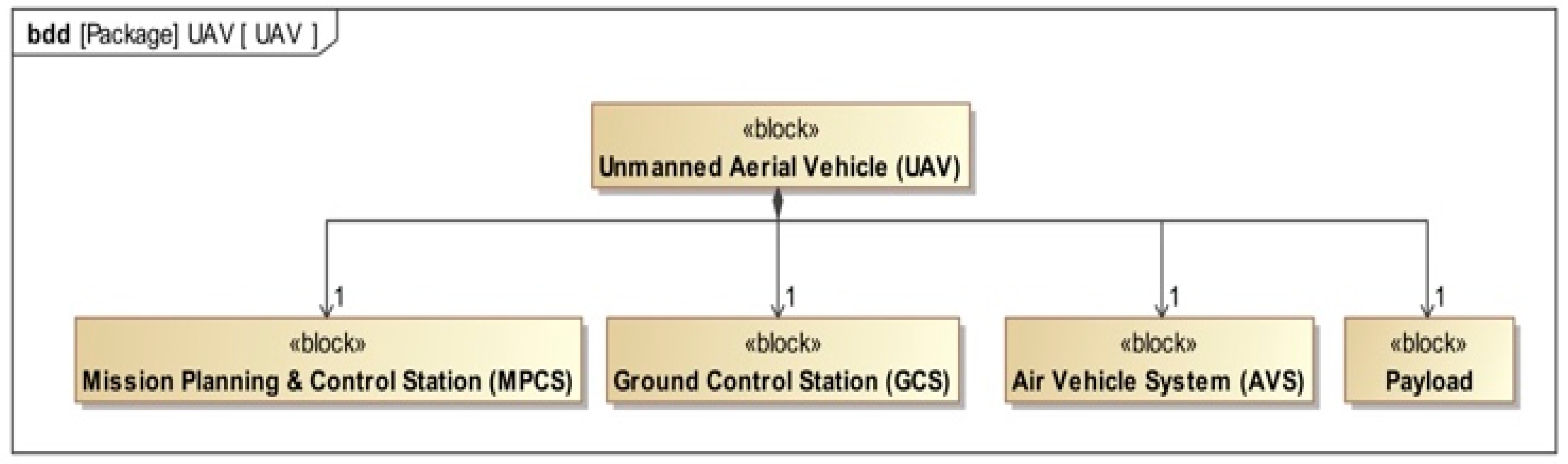
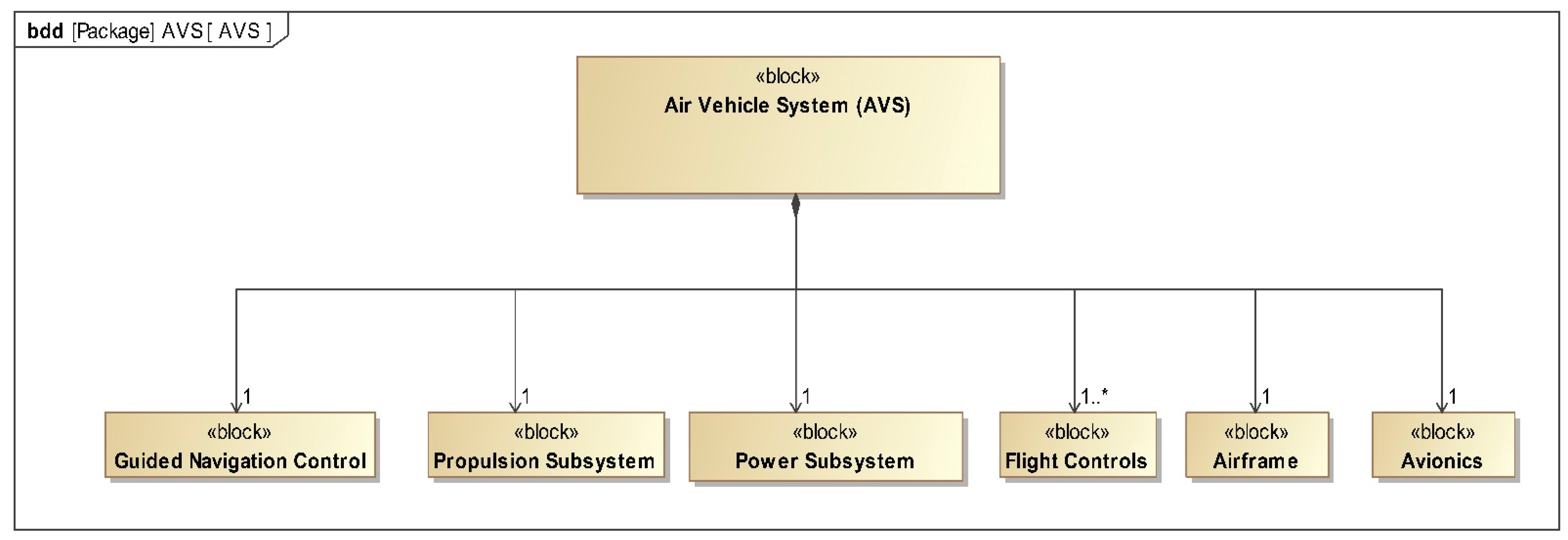
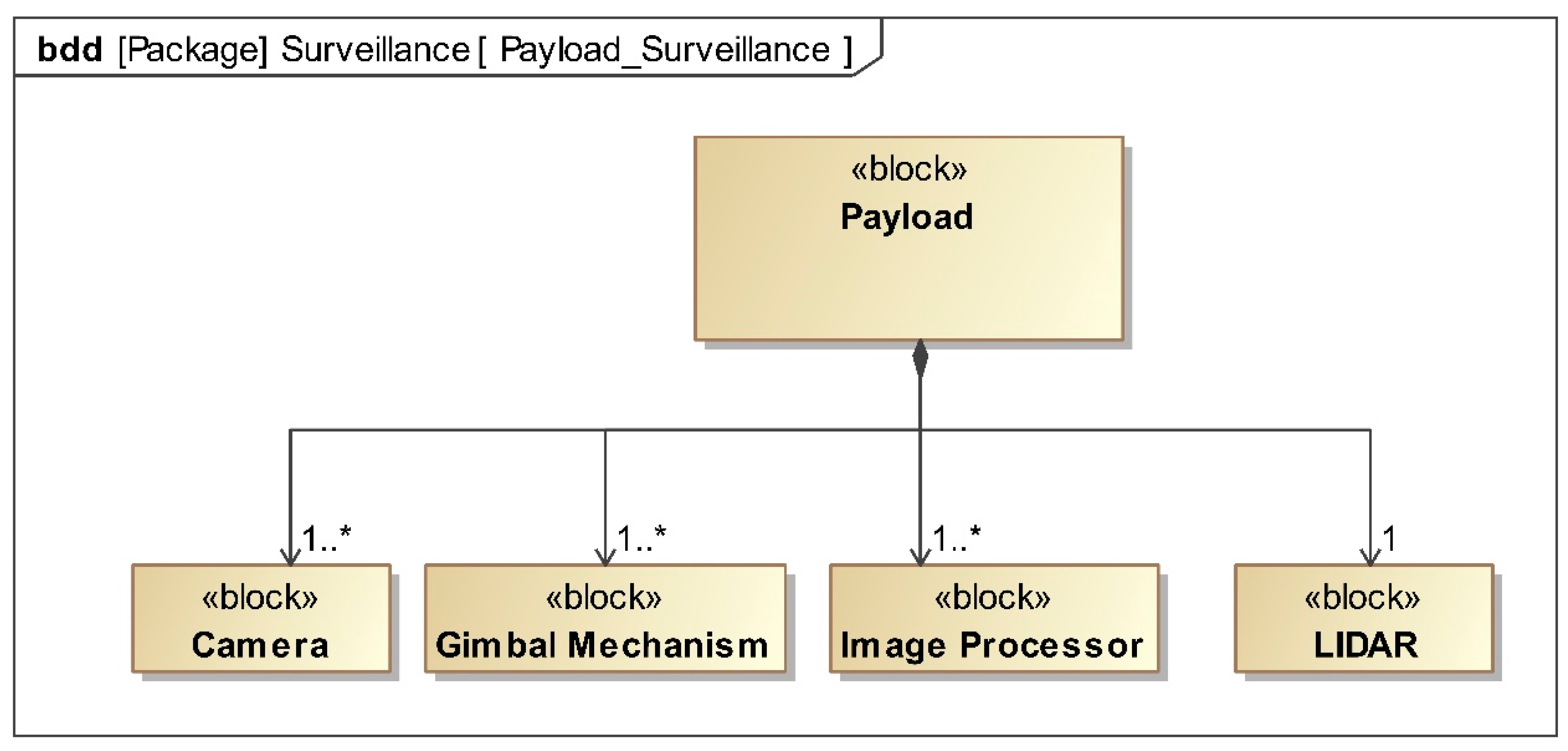
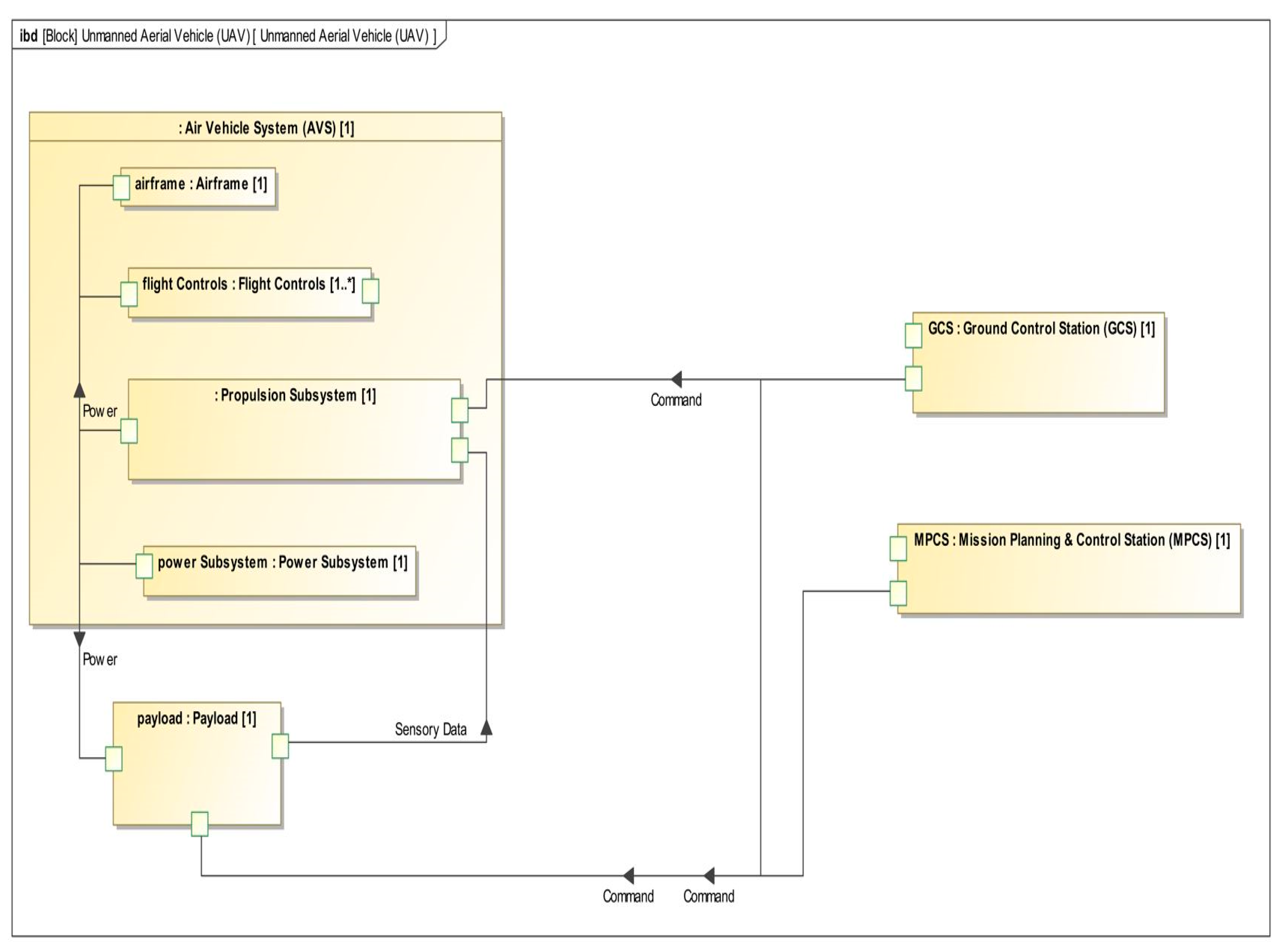
3.2. Construction of Structural Model
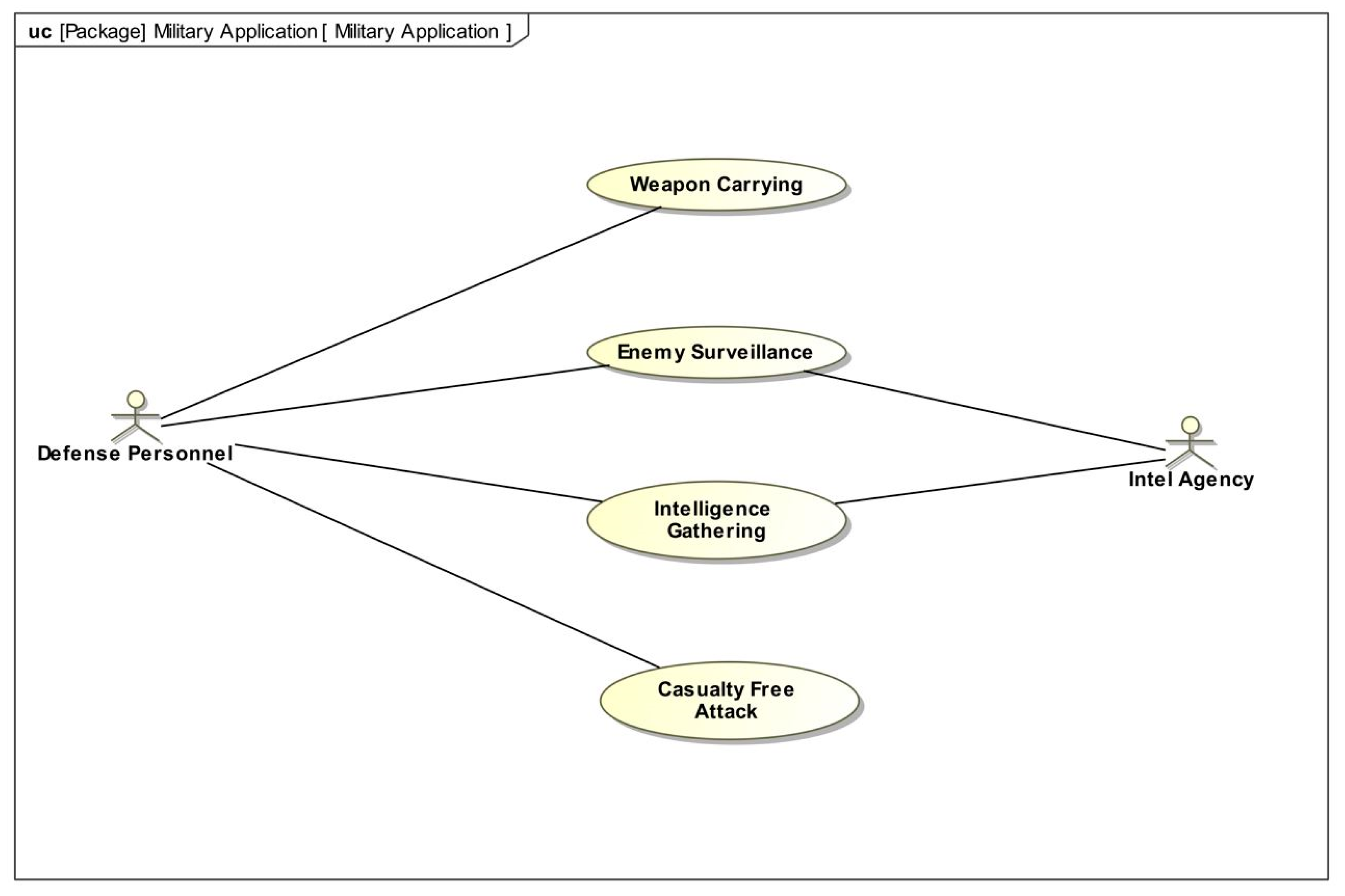
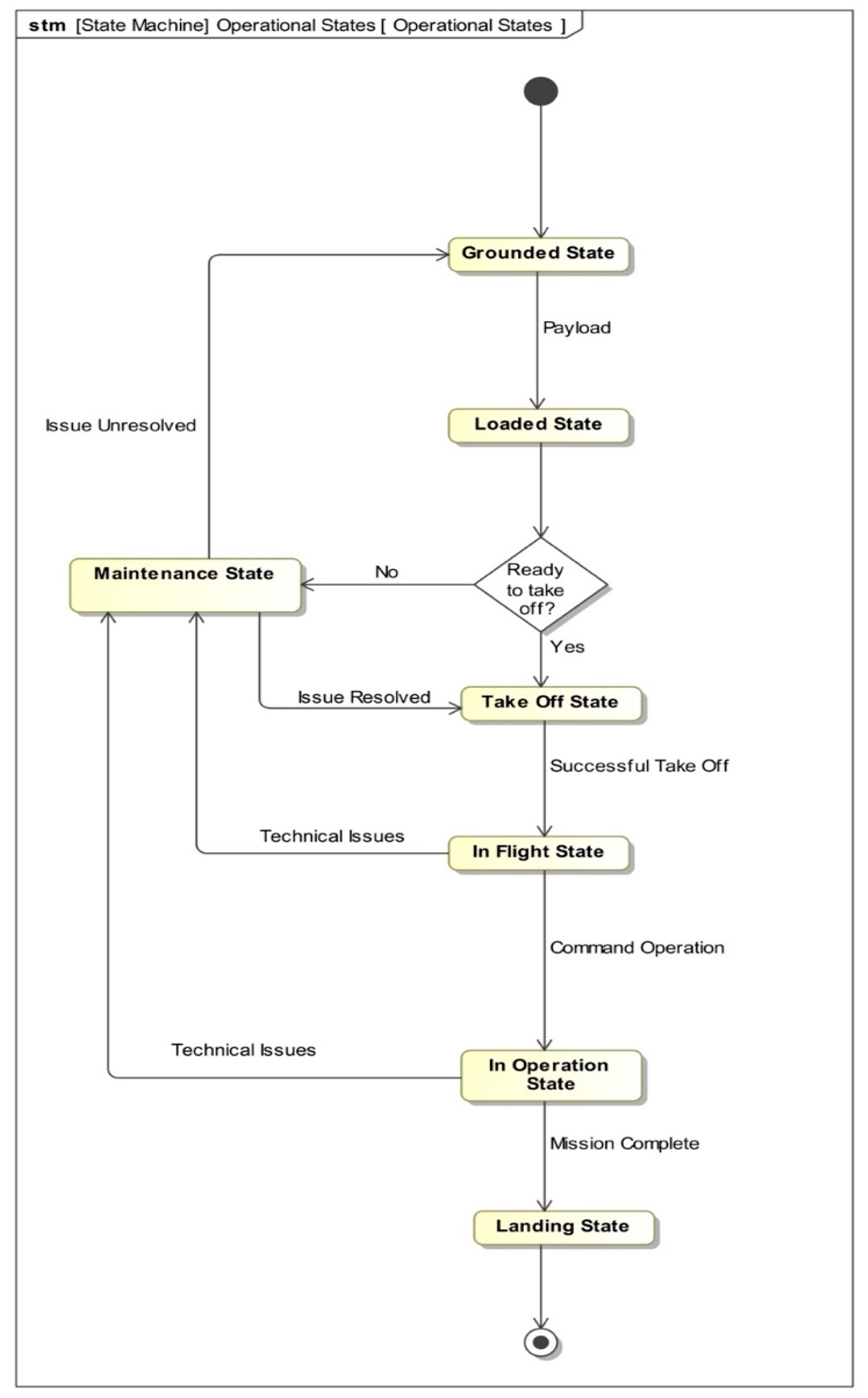
3.3. Development of Behavior Model
4. Executable SysML Simulation
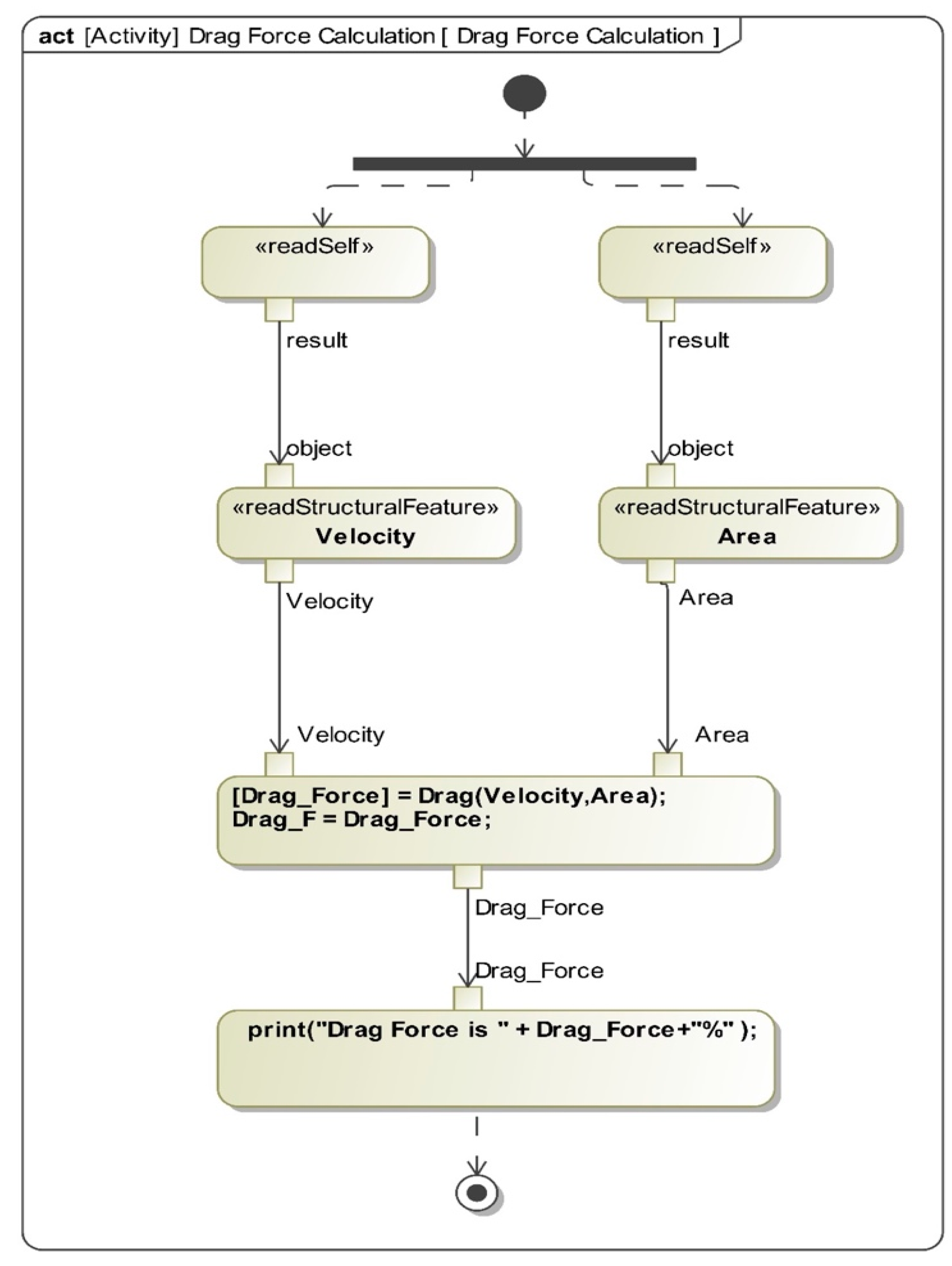
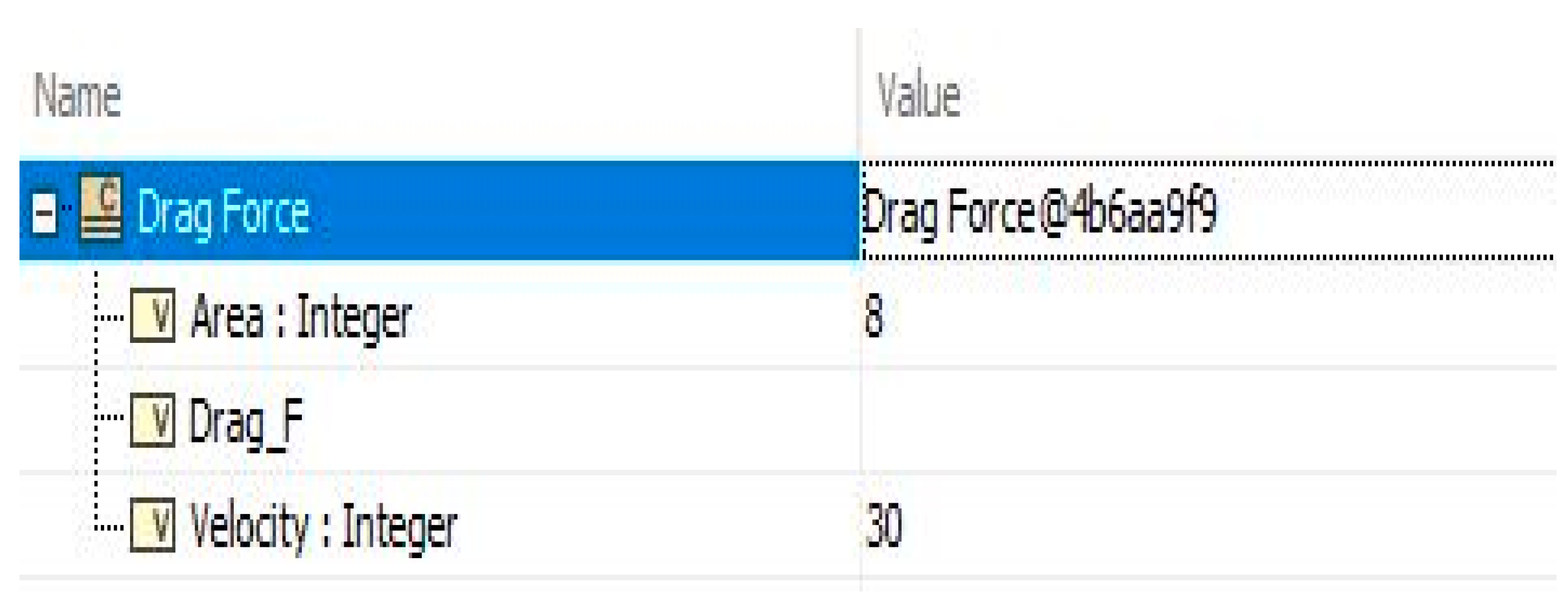
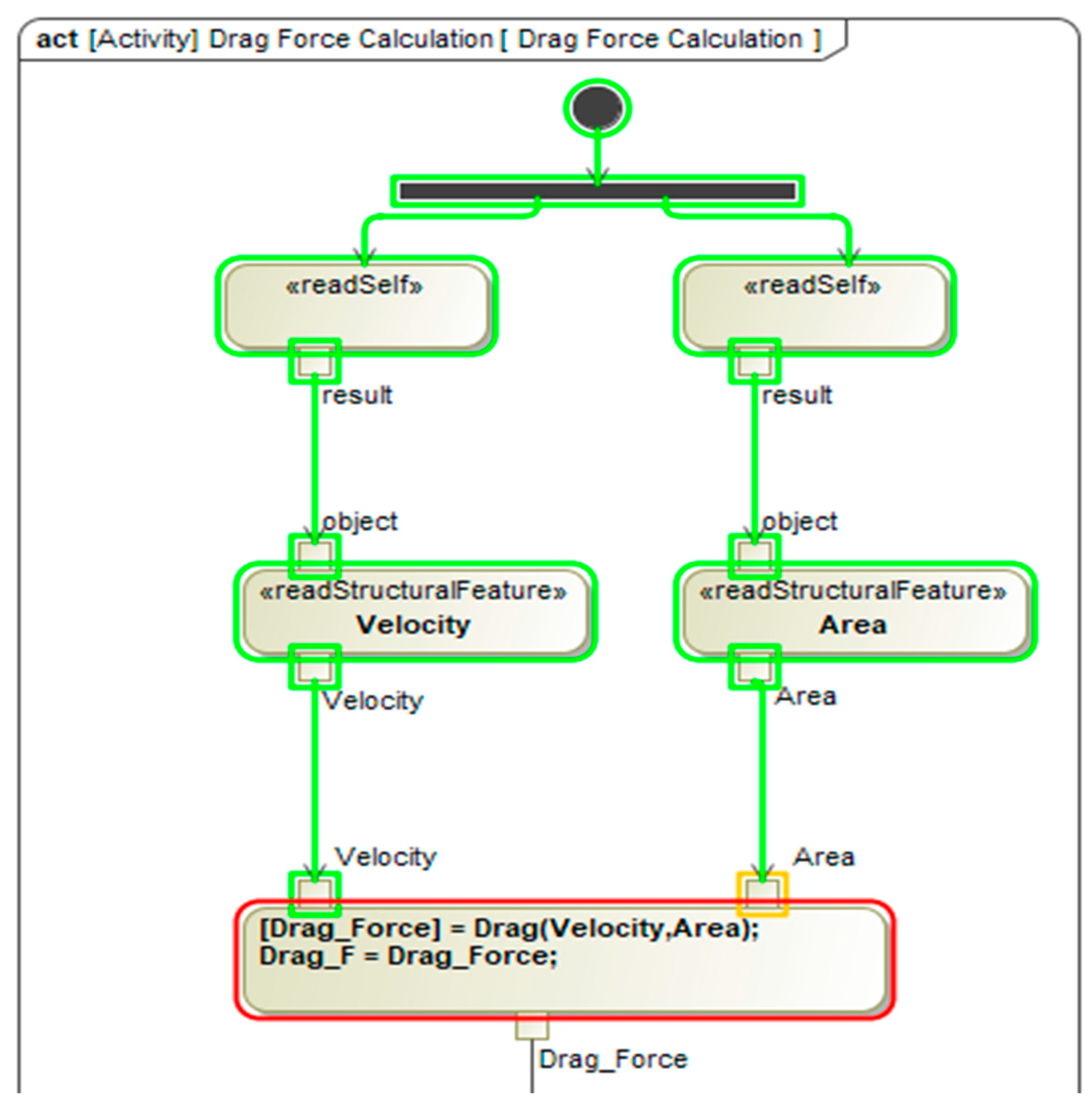
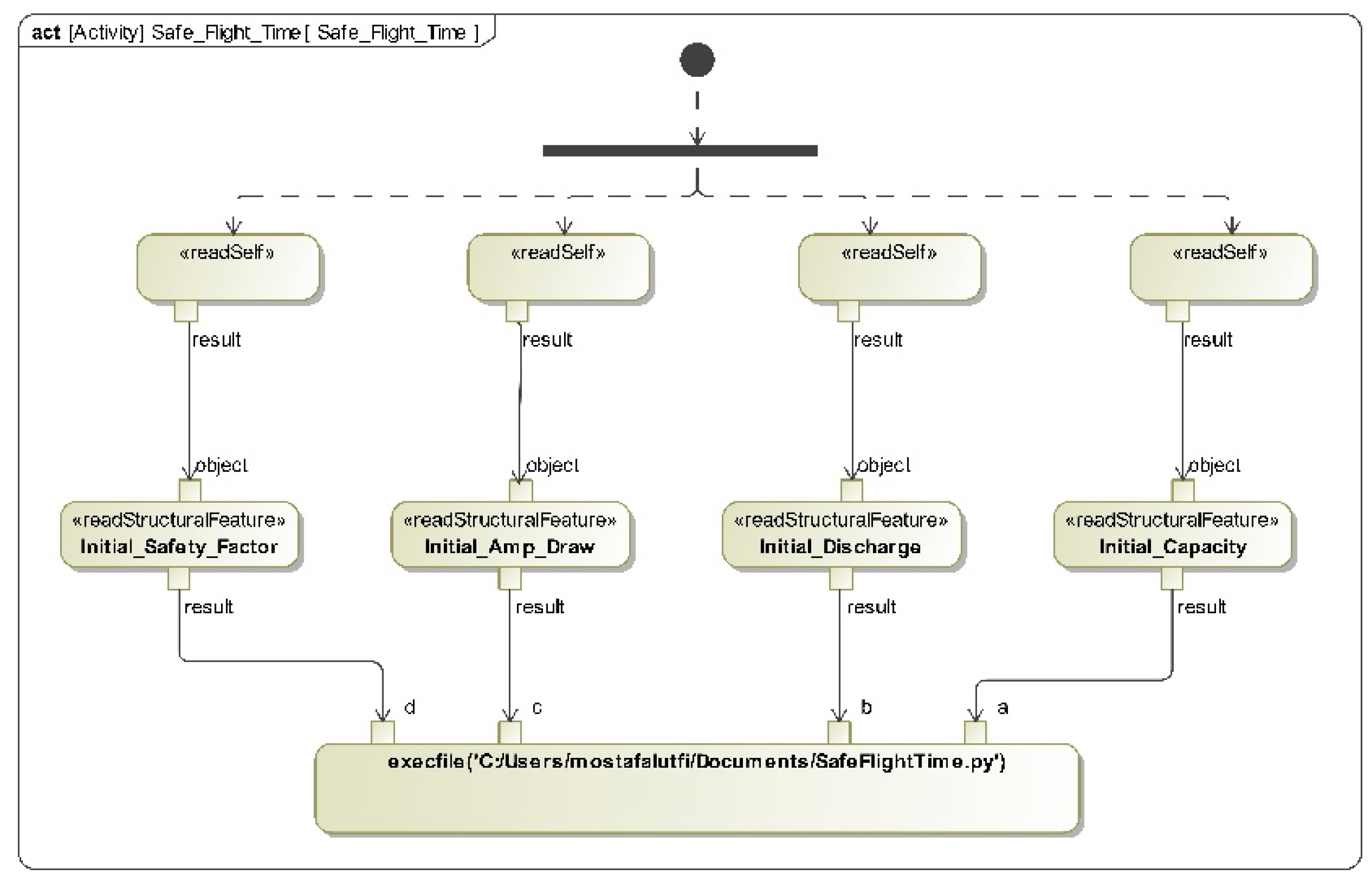
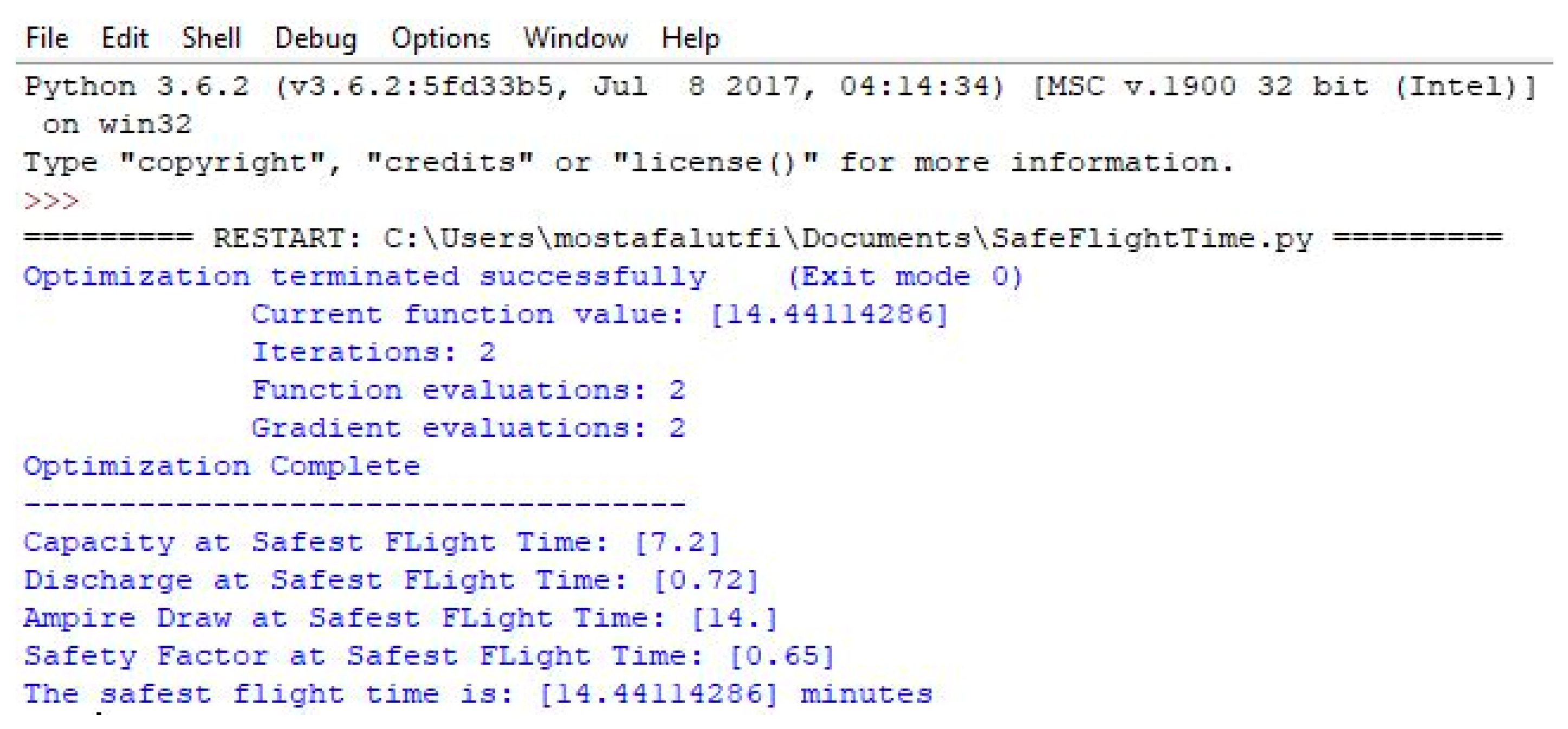
4.1. Execution through Activity Diagram
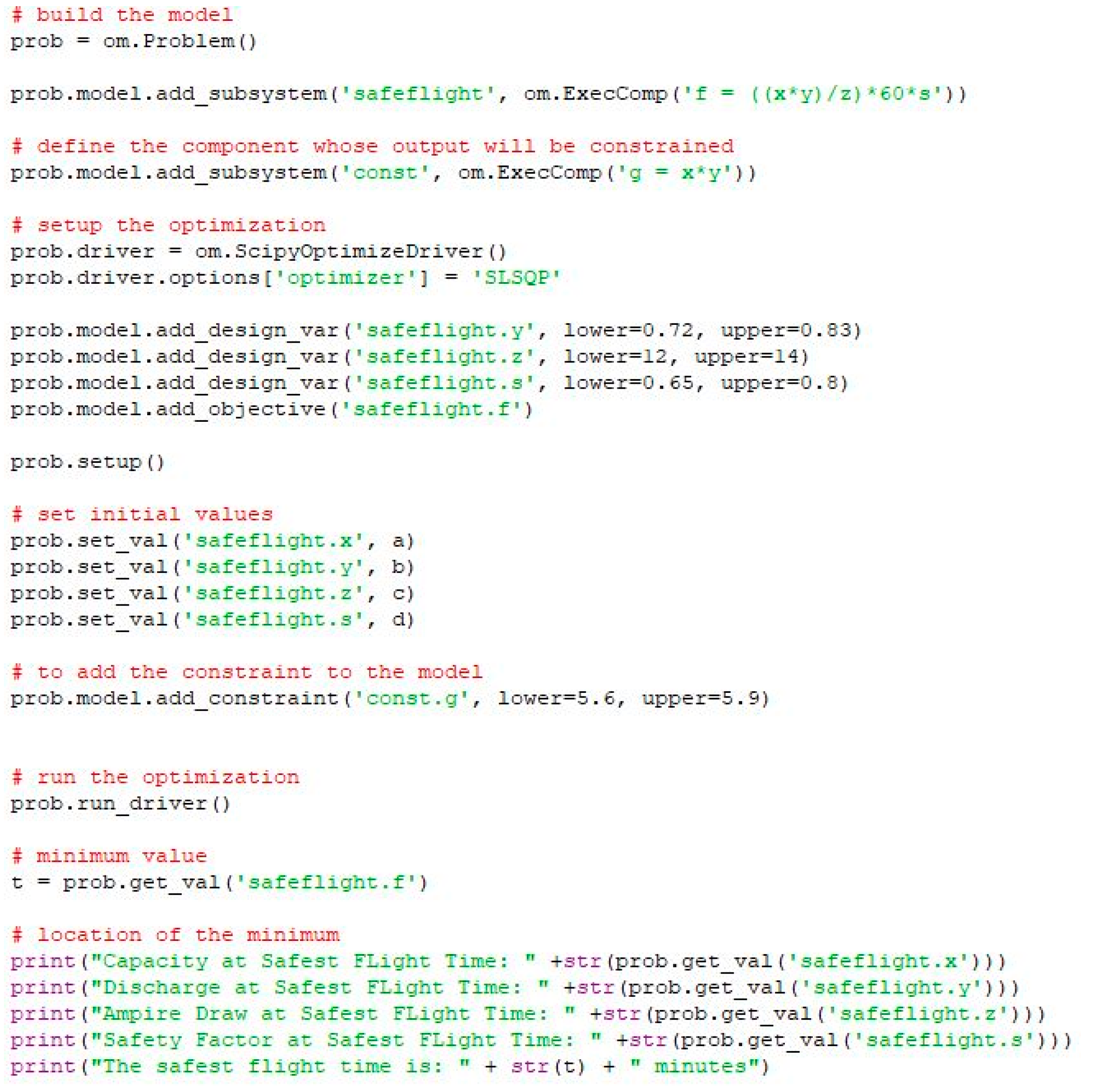
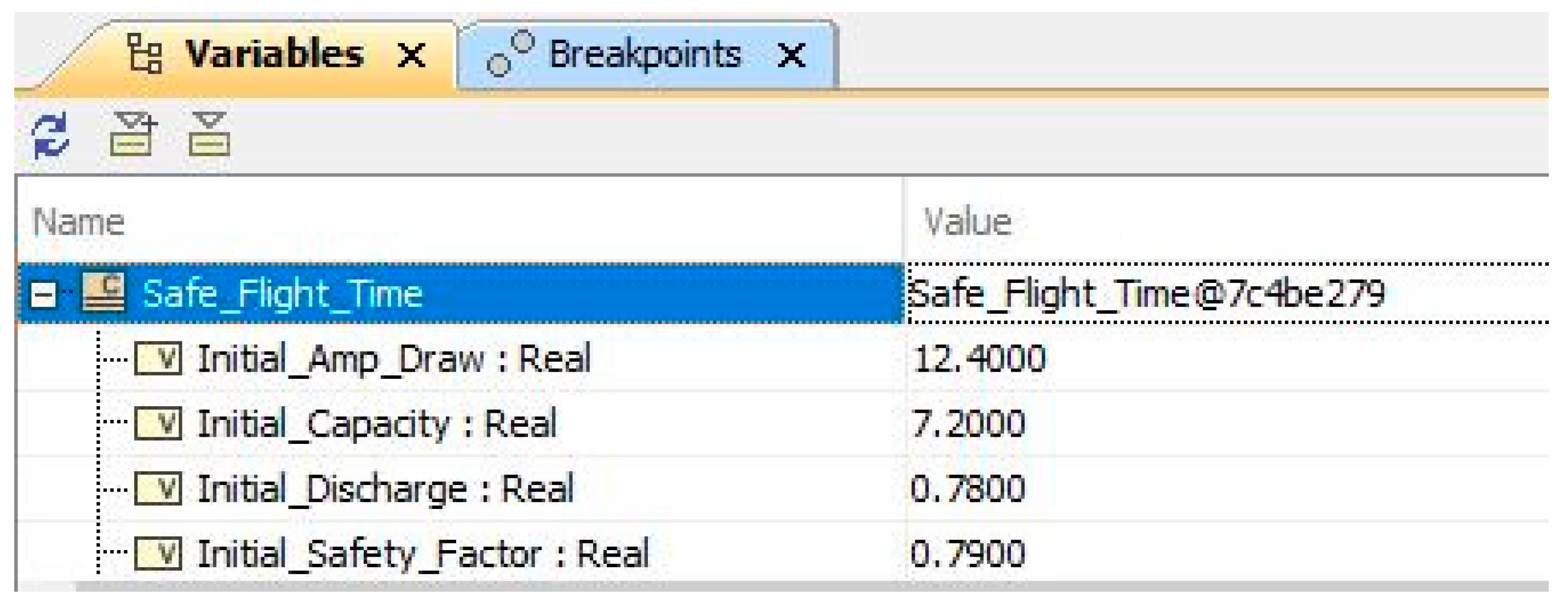
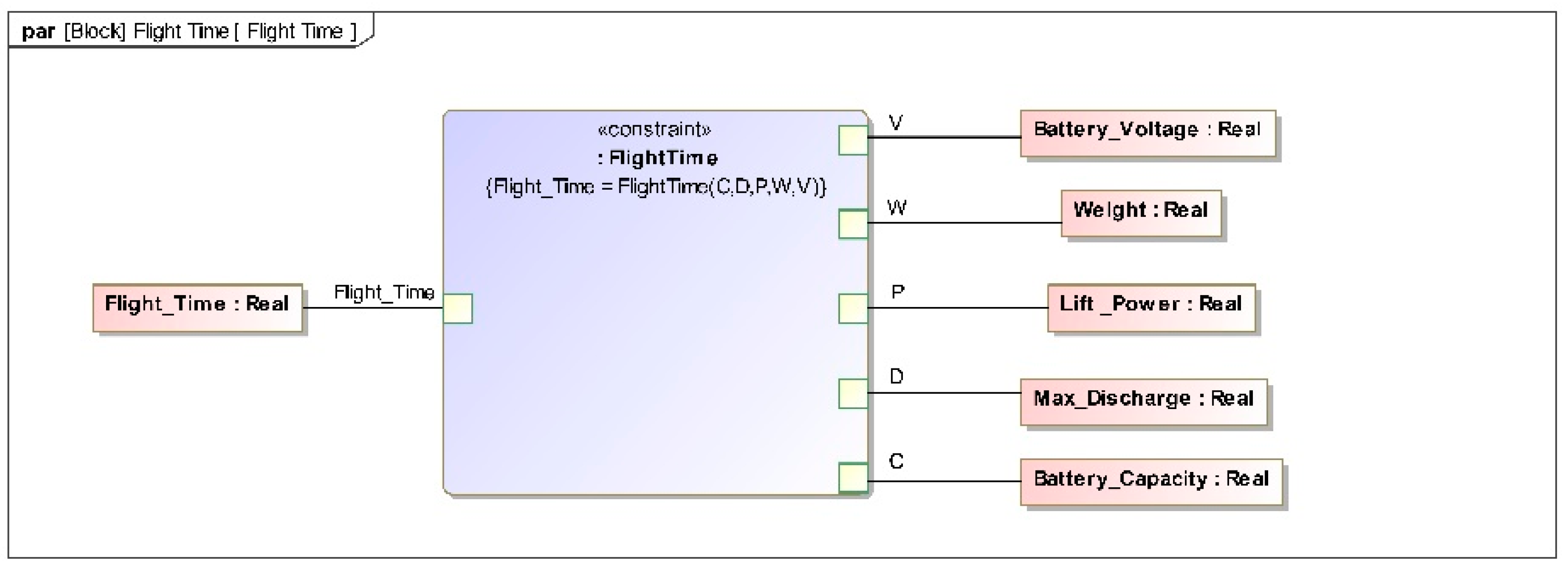
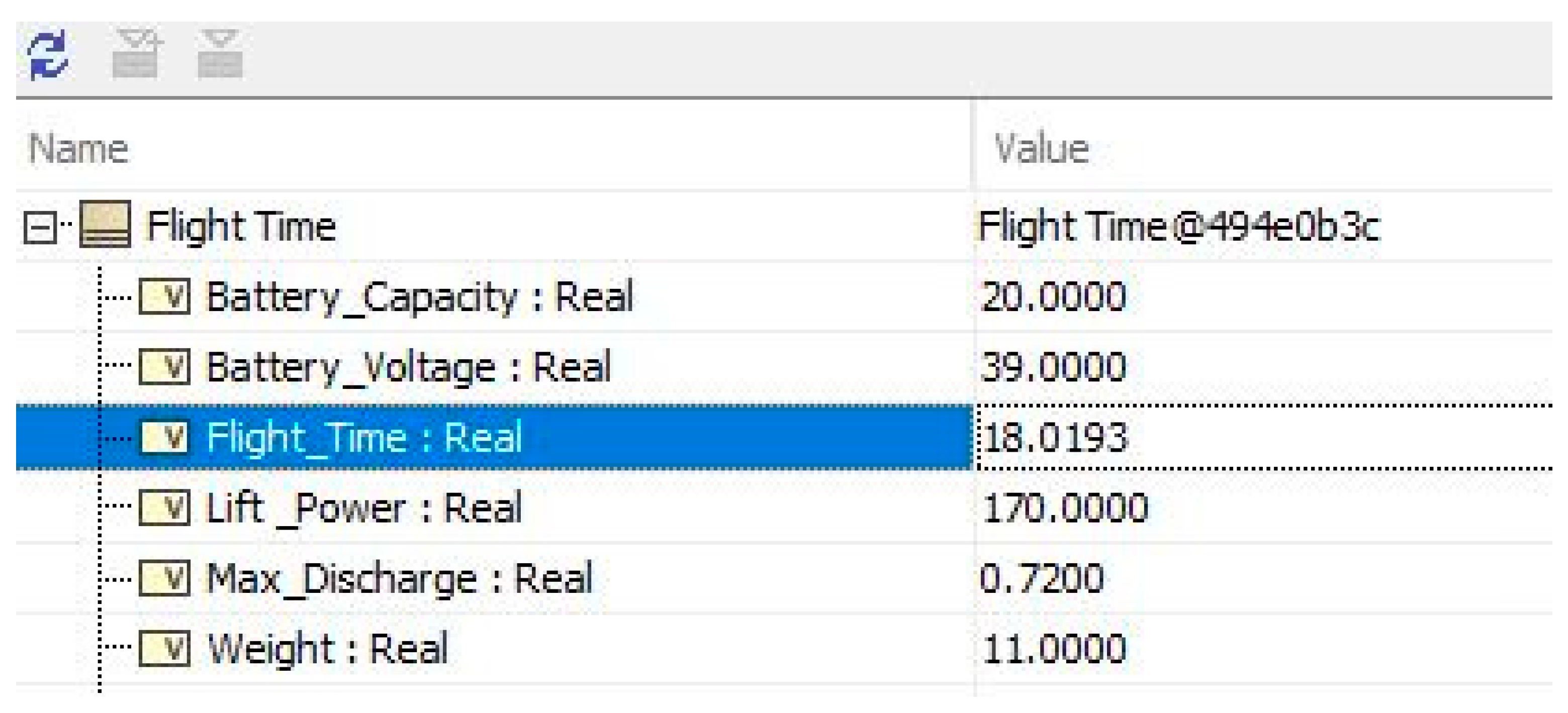
4.2. Execution through Parametric Diagram
5. Discussion
6. Implication of the Study
- The study demonstrated the efficacy and extensibility of the model-based system engineering approach in the context of UAV system architecture, behavior, and requirements;
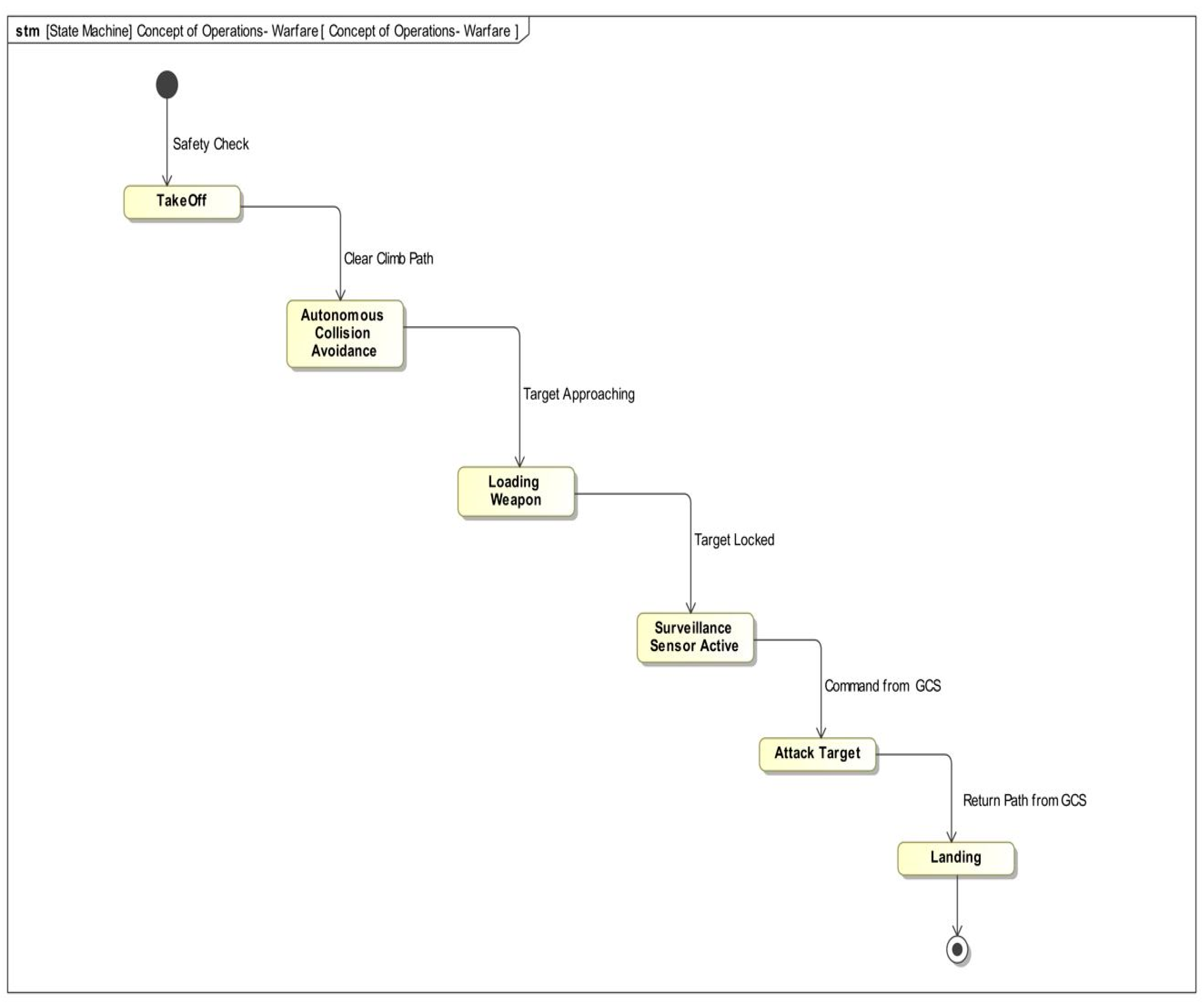
- UAV systems designed with the SysML diagram described in this study will help the user to better understand the system and will allow for future upgrades, which might be time- and cost-effective. An example of this is the state machine diagram that describes the concept of the operation of a UAV in a military environment. This will aid the users in grasping a clearer understanding of the procedure and will motivate them to use the UAV system and the method of operation;
- With the MBSE approach described in this study, users of UAVs can continuously monitor the performance of the system. The simulation that has been applied to the activity diagram can also analyze the design parameters of the UAV system. In addition to that, integration of the OpenMDAO tool with the SysML model through the activity diagram was developed without any use of custom COTS integration tools. Finally, the integration of MATLAB execution with a parametric diagram will facilitate efficient model execution and design/performance calculations for complex systems.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pigatto, D.F.; Gonçalves, L.; Pinto, A.S.R.; Roberto, G.F.; Rodrigues Filho, J.F.; Branco, K.R.L.J.C. HAMSTER-Healthy, mobility and security-based data communication architecture for Unmanned Aircraft Systems. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 52–63. [Google Scholar]
- Krichen, L.; Fourati, M.; Fourati, L.C. Communication architecture for unmanned aerial vehicle system. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, St Malo, France, 5–7 September 2018; pp. 213–225. [Google Scholar]
- Peng, S.; Zhou, Y.; Cao, L.; Yu, S.; Niu, J.; Jia, W. Influence analysis in social networks: A survey. J. Netw. Comput. Appl. 2018, 106, 17–32. [Google Scholar] [CrossRef]
- Al-Fedaghi, S.S.; Al-Fadhli, J. Modeling an unmanned aerial vehicle as a thinging machine. In Proceedings of the 2019 5th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 758–765. [Google Scholar]
- Hart, L.E. Introduction to model-based system engineering (MBSE) and SysML. In Delaware Valley INCOSE Chapter Meeting; Ramblewood Country Club: Mount Laurel, NJ, USA, 2015. [Google Scholar]
- Elakramine, F.; Jaradat, R.; Hossain, N.U.I.; Banghart, M.; Kerr, C.; El Amrani, S. Applying Systems Modeling Language in an Aviation Maintenance System. IEEE Trans. Eng. Manag. 2021, 69, 758–765. [Google Scholar] [CrossRef]
- Dzielski, J.; Blackburn, M. Implementing a Decision Framework in SysML Integrating MDAO Tools. INSIGHT 2018, 21, 15–19. [Google Scholar] [CrossRef]
- Apvrille, L.; de Saqui-Sannes, P.; Vingerhoeds, R. An educational case study of using sysml and ttool for unmanned aerial vehicles design. IEEE J. Miniat. Air Space Syst. 2020, 1, 117–129. [Google Scholar] [CrossRef]
- Steurer, M.; Morozov, A.; Janschek, K.; Neitzke, K.P. SysML-based profile for dependable UAV design. IFAC-PapersOnLine 2018, 51, 1067–1074. [Google Scholar] [CrossRef]
- Xing-hua, L.; Yun-feng, C. Design of UAV flight control system virtual prototype using rhapsody and simulink. In Proceedings of the 2010 International Conference On Computer Design and Applications, Qinhuangdao, China, 25–27 June 2010; pp. V3–V4. [Google Scholar]
- Queiroz, P.; Braga, R. Combining MARTE-UML, SysML and CVL to build unmanned aerial vehicles. In Proceedings of the Ninth International Conference on Software Engineering Advances, Nice, France, October 2014; pp. 334–340. [Google Scholar]
- Hernandez, T.R. Modeling Situation Awareness in a UAV Scenario Using SysML. Theses and Dissertations. 2021. Available online: https://scholar.afit.edu/etd/5039 (accessed on 15 October 2022).
- Aljehani, M.; Inoue, M.; Yokemura, T. Particle Swarm Optimization Algorithm Presented in SysML and Applied in Multi-UAV System. In Proceedings of the 2021 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 10–12 January 2021; pp. 1–4. [Google Scholar]
- MacCarthy, J. The Drone System I: Context-Level Architecture. In Proceedings of the INCOSE International Symposium, Williams Building, College Park, MD, USA; 2019; pp. 1174–1184. [Google Scholar]
- Leserf, P.; De Saqui-Sannes, P.; Hugues, J. Trade-off analysis for SysML models using decision points and CSPs. Softw. Syst. Model. 2019, 18, 3265–3281. [Google Scholar] [CrossRef] [Green Version]
- Specking, E.; Parnell, G.; Pohl, E.; Buchanan, R. Early Design Space Exploration with Model-Based System Engineering and Set-Based Design. Systems 2018, 6, 45. [Google Scholar] [CrossRef] [Green Version]
- Aïello, O.; Kandel, D.S.D.R.; Chaudemar, J.C.; Poitou, O.; De Saqui-Sannes, P. Populating MBSE models from MDAO analysis. In Proceedings of the 2021 IEEE International Symposium on Systems Engineering (ISSE), Vienna, Austria, 13 September–13 October 2021; pp. 1–8. [Google Scholar]
- Srivastava, A. Tradespace Exploration of a UAV Conceptual Design Using Model-Based Systems Engineering. Ph.D. Thesis, Clemson University, Clemson, SC, USA, 2021. [Google Scholar]
- Aloui, K.; Hammadi, M.; Guizani, A.; Haddar, M.; Soriano, T. A new SysML Model for UAV Swarm Modeling: UavSwarmML. In Proceedings of the 2022 IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 25–28 April 2022; pp. 1–8. [Google Scholar]
- Wang, Y.; Sun, Q.; Wang, M.; Zhang, Y. The Requirement Traceable Modeling Method and Application of UAV Command System-of-systems Based on SysML. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 767–772. [Google Scholar]
- Goodchild, A.; Toy, J. Delivery by drone: An evaluation of unmanned aerial vehicle technology in reducing CO2 emissions in the delivery service industry. Transp. Res. Part D Transp. Environ. 2018, 61, 58–67. [Google Scholar] [CrossRef]
- Voss, W.G. Privacy law implications of the use of drones for security and justice purposes. Int. J. Liabil. Sci. Enq. 2013, 6, 171–192. [Google Scholar] [CrossRef]
- Boucher, P. Domesticating the drone: The demilitarisation of unmanned aircraft for civil markets. Sci. Eng. Ethics 2015, 21, 1393–1412. [Google Scholar] [CrossRef] [PubMed]
- Hause, M. The SysML modelling language. In Proceedings of the Fifteenth European Systems Engineering Conference, Cheltenham, UK, 18–20 September 2006; pp. 1–12. [Google Scholar]
- Bouquet, F.; Gauthier, J.-M.; Hammad, A.; Peureux, F. Transformation of SysML structure diagrams to VHDL-AMS. In Proceedings of the 2012 Second Workshop on Design, Control and Software Implementation for Distributed MEMS, Besancon, France; pp. 74–81.
- Hause, M.C.; Thom, F. An integrated MDA approach with SysML and UML. In Proceedings of the 13th IEEE International Conference on Engineering of Complex Computer Systems (iceccs 2008), Belfast, UK, 31 March–3 April 2008; pp. 249–254. [Google Scholar]
- Friedenthal, S.; Moore, A.; Steiner, R. A Practical Guide to SysML: The Systems Modeling Language; Morgan Kaufmann: Burlington, MA, USA, 2014. [Google Scholar]
- dos Santos Soares, M.; Vrancken, J. Requirements specification and modeling through SysML. In Proceedings of the 2007 IEEE International Conference on Systems, Man and Cybernetics; pp. 1735–1740.
- Buchmann, T.; Dotor, A.; Westfechtel, B. Model-driven software engineering: Concepts and tools for modeling-in-the-large with package diagrams. Comput. Sci. Res. Dev. 2014, 29, 73–93. [Google Scholar] [CrossRef]
- Goto, T.; Kirishima, T.; Nishino, T.; Yaku, T.; Tsuchida, K. Generation of UML package diagrams based on an attribute graph grammar. J. Comput. Sci. 2014, 5, 606–615. [Google Scholar] [CrossRef]
- Arifin, H.H.; Ong, H.K.R.; Daengdej, J.; Novita, D. Encoding technique of genetic algorithms for block definition diagram using OMG SysML™ notations. In Proceedings of the INCOSE International Symposium; pp. 218–232.
- Pustina, L.; Schwarzer, S.; Martini, P.; Muurinen, J.; Salomaki, A. A methodology for performance predictions of future arm systems modelled in uml. In Proceedings of the 2008 2nd Annual IEEE Systems Conference, Montreal, QC, Canada, 7–10 April 2008; pp. 1–8. [Google Scholar]
- Mhenni, F.; Nguyen, N.; Choley, J.-Y. Automatic fault tree generation from SysML system models. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 715–720. [Google Scholar]
- Fauzan, R.; Siahaan, D.; Rochimah, S.; Triandini, E. Use case diagram similarity measurement: A new approach. In Proceedings of the 2019 12th International Conference on Information & Communication Technology and System (ICTS), Surabaya, Indonesia, 18 July 2019; pp. 3–7. [Google Scholar]
- Baouya, A.; Bennouar, D.; Mohamed, O.A.; Ouchani, S. A probabilistic and timed verification approach of SysML state machine diagram. In Proceedings of the 2015 12th International Symposium on Programming and Systems (ISPS), Algiers, Algeria, 28–30 April 2015; pp. 1–9. [Google Scholar]
- Jarraya, Y.; Soeanu, A.; Debbabi, M.; Hassaine, F. Automatic verification and performance analysis of time-constrained sysml activity diagrams. In Proceedings of the 14th Annual IEEE International Conference and Workshops on the Engineering of Computer-Based Systems (ECBS’07), Tucson, AZ, USA, 26–29 March 2007; pp. 515–522. [Google Scholar]
- Rahim, M.; Hammad, A.; Boukala-Ioualalen, M. Towards the formal verification of sysml specifications: Translation of activity diagrams into modular petri nets. In Proceedings of the 2015 3rd International Conference on Applied Computing and Information Technology/2nd International Conference on Computational Science and Intelligence, Okayama, Japan, 12–16 July 2015; pp. 509–516. [Google Scholar]
- Gray, J.S.; Hwang, J.T.; Martins, J.R.R.A.; Moore, K.T.; Naylor, B.A. OpenMDAO: An Open-Source Framework for Multidisciplinary Design, Analysis, and Optimization. Struct. Multidiscip. Optim. 2019, 59, 1075–1104. [Google Scholar] [CrossRef]
- Kerr, C.; Jaradat, R.; Hossain, N.U.I. Battlefield mapping by an unmanned aerial vehicle swarm: Applied systems engineering processes and architectural considerations from system of systems. IEEE Access 2020, 8, 20892–20903. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Approach | Application Area and Findings |
|---|---|---|
| Apvrille, Sannes [8] | MBSE approach includes architectural, behavior, and requirement model | Providing design of the architecture of UAVs. |
| Steurer, Morozov [9] | Dual-graph error propagation model (DEPM) and SysML and the technique for converting the SysML model to the DEPM | Studying the UAV dependability profile and providing the technique for converting the SysML model to the DEPM. |
| Xing-hua and Yun-feng [10] | Rhapsody and Simulink | Providing a technique of UAVs flight control systems virtual design. |
| Queiroz and Braga [11] | Combination of product line engineering (PLE) and model-driven engineering (MDE) | Providing a method for producing family models of UAV. |
| Hernandez [12] | Integration of No Magic’s Cameo Systems Modeler and external SA analysis tools | To monitor the information flow that helps operator situation awareness (SA), and the results of the study showed that it is feasible to measure the elements of information acquired from the environment and transmitted to the operator via the UAS. |
| Aljehani, Inoue [13] | A particle swarm optimization (PSO) method using a SysML activity diagram | Deploying the method to a multi-UAV with chosen airframes and the study’s findings revealed varied fitness values and the optimal site for various UAV airframes. |
| MacCarthy [14] | SysML structural and behavioral diagrams | Describing reference design of the drone system and identifying type of the analysis needed for designing a system. |
| Dzielski and Blackburn [7] | A SysML approach using a multi-dimensional design and optimization (MDAO) tool | Presenting a decision framework and implementing it to a hypothetical drone and also concluded that it is feasible. |
| Leserf, de Saqui-Sannes [15] | MBSE, Sysml, Papyrus, Eclipse | Trade-off analysis in multi-core UAVs and described that it is feasible to create the problem description file to use a SysML extension and their plug-in |
| Specking, Parnell [16] | Combination of set-based design (SBD) and MBSE | An integrated framework for trade space exploration (TSE) |
| Aïello, Kandel [17] | Multidisciplinary design analysis and optimization (MDAO) and MBSE | On battery usages of UAVs and provided a way to increase self-confidence in some model values, increase self-confidence in the accomplishment of requirements, and refine some requirements values more precisely |
| Srivastava [18] | MBSE | The theoretical design of UAVs and provided a basis for formalizing models frequently used in conceptual airplanes, leading to a more structured framework for the models to be implemented, and lowering disparity and errors. |
| Aloui, Hammadi [19] | MBSE, SysML, domain-specific language (DSL), robot operating system (ROS) | Designing an efficient swarm of UAVs |
| Wang, Sun [20] | SysML | To solve the issue of requirements tracing for adaption strategies underneath the circumstances of significant demands, intricate linkages, and rapid changes in the UAV command structure and made it easier to quickly develop a model of the command system-of-systems capacity needs. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hossain, N.U.I.; Lutfi, M.; Ahmed, I.; Akundi, A.; Cobb, D. Modeling and Analysis of Unmanned Aerial Vehicle System Leveraging Systems Modeling Language (SysML). Systems 2022, 10, 264. https://doi.org/10.3390/systems10060264
Hossain NUI, Lutfi M, Ahmed I, Akundi A, Cobb D. Modeling and Analysis of Unmanned Aerial Vehicle System Leveraging Systems Modeling Language (SysML). Systems. 2022; 10(6):264. https://doi.org/10.3390/systems10060264
Chicago/Turabian StyleHossain, Niamat Ullah Ibne, Mostafa Lutfi, Ifaz Ahmed, Aditya Akundi, and Daniel Cobb. 2022. "Modeling and Analysis of Unmanned Aerial Vehicle System Leveraging Systems Modeling Language (SysML)" Systems 10, no. 6: 264. https://doi.org/10.3390/systems10060264