.jpg)
Effect of Electrode Spacing on the Detection of Coating Defects in Buried Pipelines Using Direct Current Voltage Gradient Method


Abstract
:1. Introduction
2. Materials and Methods
2.1. Setup of Test Bed
2.2. Real-Time Coating Defect Detection System
2.3. DCVG Calculation by FEM Simulation
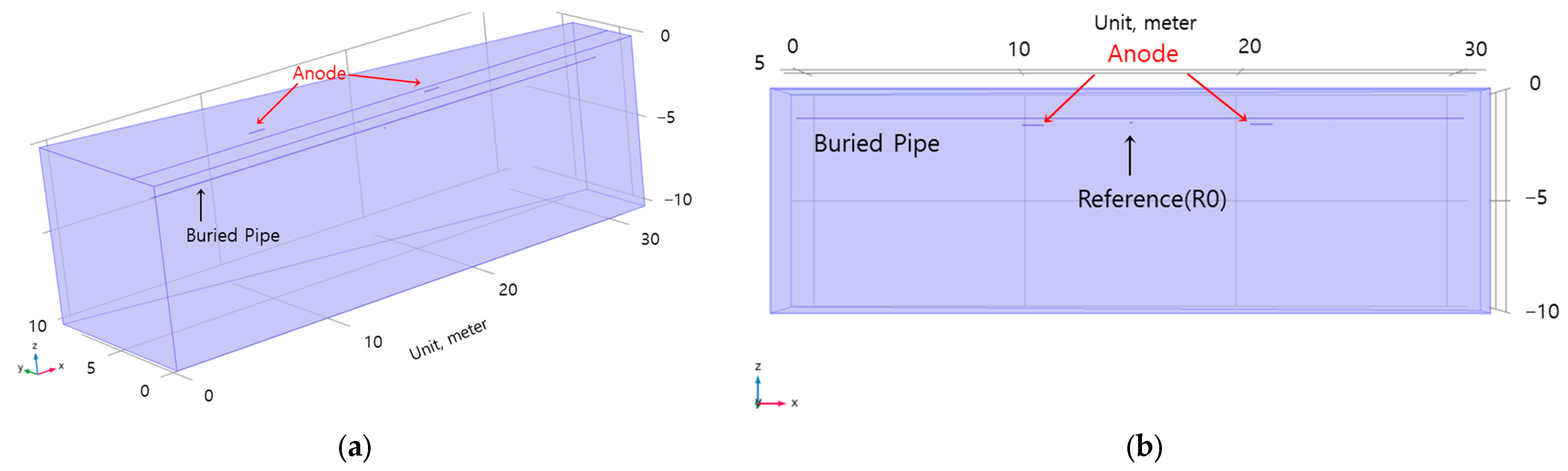
2.3.1. Geometry for Modeling
2.3.2. Electrochemical Parameters
3. Results
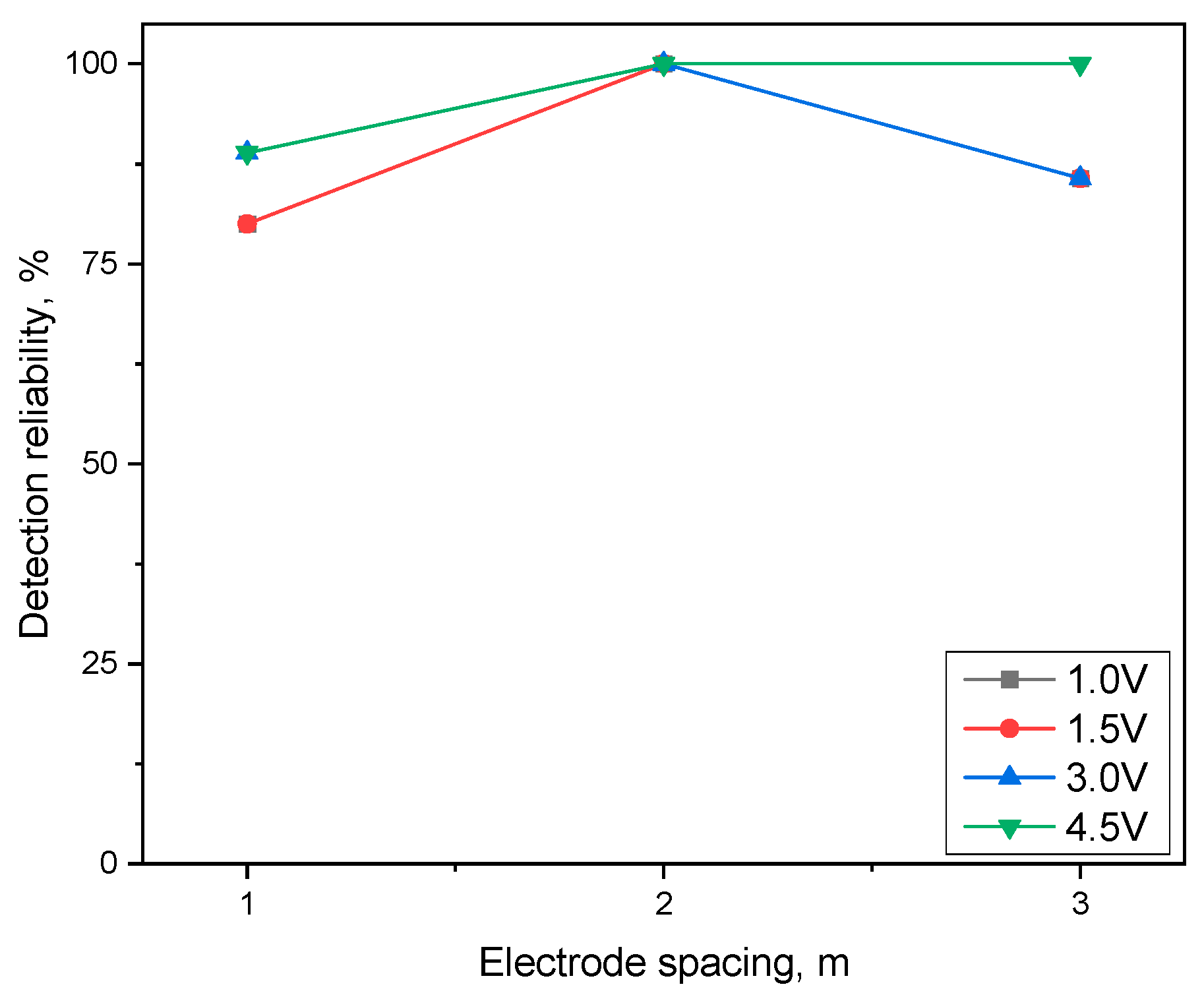
3.1. Effect of Electrode Spacing on the Detection Reliability of Coating Defect in the Pipe Buried in the Soil
3.2. DCVG Calculation by FEM Simulation
4. Discussion
5. Conclusions
- The optimal spacing of the detection electrodes was found to be Δ2 m in investigating the coating defect of pipe buried in the soil. The reason is that when the electrode spacing increases, the noise signal is eliminated, and when the electrode spacing exceeds the appropriate interval, the potential reversal signal disappears with the noise signal, and the defect detection reliability also decreases.
- The location of the defect detection signal is shifted as the detection electrode spacing increases. This is because the reference points of the two electrodes move as the detection interval increases, and the positions of the maximum and minimum values of the DCVG signal in the waveform shift shape.
- As the detection electrode spacing increased, the DCVG signal magnitude increased according to both the real-time detection method and the FEM calculation method, and a similar trend of potential reversal location was obtained. However, the magnitude was more significant for the FEM calculation method. This tendency may be related to the inhomogeneity of the real soil.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mgonja, C.T. The Impacts of corrosion in weld joints and surfaces of oil and gas pipelines: A Review. Int. J. Eng. Trends Technol. 2017, 52, 99–108. [Google Scholar] [CrossRef]
- Berrouane, M.T.; Khan, F.; Hawboldt, K.; Eckert, R.; Skovhus, T.L. Model for microbiologically influenced corrosion potential assessment for the oil and gas industry. Corros. Eng. Sci. Technol. 2018, 53, 378–392. [Google Scholar] [CrossRef]
- Cole, I.S.; Marney, D. The science of pipe corrosion: A review of the literature on the corrosion of ferrous metals in soils. Corros. Sci. 2012, 56, 5–16. [Google Scholar] [CrossRef]
- Biase, L.D.; Cigna, R.; Fumei, O. A new technique for locating coating faults on buried metallic pipelines. Adv. Mater. Res. 2008, 38, 113–120. [Google Scholar] [CrossRef]
- Gómez, R.A.; Silva, M.S.; Arteaga, E.B.; Schoefs, F.; Muñoz, F. Reliability assessments of corroded pipelines based on internal pressure—A review. Eng. Fail. Anal. 2019, 98, 190–214. [Google Scholar] [CrossRef]
- Ossai, C.I. Advances in Asset Management Techniques: An overview of corrosion mechanisms and mitigation strategies for oil and gas pipelines. Int. Sch. Res. Netw. Corros. 2012, 2012, 570143. [Google Scholar] [CrossRef]
- Samimi, A.; Zarinabadi, S. An analysis of polyethylene coating corrosion in oil and gas pipelines. J. Am. Sci. 2011, 7, 1032–1036. [Google Scholar]
- Wasim, M.; Djukic, M.B. External corrosion of oil and gas pipelines: A review of failure mechanisms and predictive preventions. Nat. Gas Sci. Eng. 2022, 100, 104467. [Google Scholar] [CrossRef]
- Breton, T.; Heno, J.C.S.; Alamilla, J.L.; Ramirez, J.A. Identification of failure type in corroded pipelines: A Bayesian probabilistic approach. J. Hazard. Mater. 2010, 179, 628–634. [Google Scholar] [CrossRef] [PubMed]
- NACE SP0169; Control of External Corrosion on Underground or Submerged Metallic Piping Systems. NACE International: Houston, TX, USA, 2013.
- EN 12954; General Principles of Cathodic Protection of Buried or Immersed Onshore Metallic Structures. European Committee for Standardization: Brussels, Belgium, 2019.
- Wasim, M.; Shoaib, S.; Mubarak, N.M.; Inamuddin; Asiri, A.M. Factors influencing corrosion of metal pipes in soils. Environ. Chem. Lett. 2018, 16, 861–879. [Google Scholar] [CrossRef]
- Li, X.; Castaneda, H. Damage evolution of coated steel pipe under cathodic-protection in soil. Anti-Corros. Methods Mater. 2017, 64, 118–126. [Google Scholar] [CrossRef]
- Ge, L.; Zhang, C.; Tian, G.; Xiao, X.; Ahmed, J.; Wei, G.; Hu, Z.; Xiang, J.; Robinson, M. Current trends and perspectives of detection and location for buried non-metallic pipelines. Chin. J. Mech. Eng. 2021, 34, 1–29. [Google Scholar] [CrossRef]
- Varela, F.; Tan, M.Y.; Forsyth, M. An overview of major methods for inspecting and monitoring external corrosion of on-shore transportation pipelines. Corros. Eng. Sci. Technol. 2015, 50, 226–235. [Google Scholar] [CrossRef]
- Kowalski, A. The close interval potential survey (CIS/CIPS) method for detecting corrosion in underground pipelines. In Underground Pipeline Corrosion; Woodhead Publishing: Sawston, UK, 2014; pp. 227–246. [Google Scholar] [CrossRef]
- Masilela, Z.; Pereira, J. Using the direct current voltage gradient technology as a quality control tool during construction of new pipelines. Eng. Fail. Anal. 1998, 5, 99–104. [Google Scholar] [CrossRef]
- NACE 6128; Excavation Validates Guided Wave and APEC Indirect Exams at Nuclear Power Plant. NACE International: Houston, TX, USA, 2015.
- Eyre, D. The Pearson survey method for detecting corrosion in underground pipelines. In Underground Pipeline Corrosion; Woodhead Publishing: Sawston, UK, 2014; pp. 247–254. [Google Scholar] [CrossRef]
- NACE 05166; External Corrosion Risk Management for Aged Steel Pipelines Buried in High Consequence Areas. Association for Materials Protection and Performance: Houston, TX, USA; Pittsburgh, PA, USA, 2005.
- Xie, S.; Duan, Z.; Li, J.; Tong, Z.; Tian, M.; Chen, Z. A novel magnetic force transmission eddy current array probe and its application for nondestructive testing of defects in pipeline structures. Sens. Actuators A Phys. 2020, 309, 112030. [Google Scholar] [CrossRef]
- Lim, B.T.; Kim, M.G.; Kim, K.T.; Chang, H.Y.; Kim, Y.S. Effect of applied voltage on the reliability of coating flaw detection of pipe with different buried depths. Corros. Sci. Technol. 2019, 18, 227–284. [Google Scholar] [CrossRef]
- Kim, M.G.; Lim, B.T.; Kim, K.T.; Chang, H.Y.; Park, H.B.; Kim, Y.S. Effects of rectifier and copper grid interference on the detection reliability of coating flaws on buried pipes. Corros. Sci. Technol. 2020, 19, 221–223. [Google Scholar] [CrossRef]
- NACE SP0207; Performing Close-Interval Potential Surveys and DC Surface Potential Gradient Surveys on Buried or Submerged Metallic Pipelines. NACE International: Houston, TX, USA, 2007.
- Kamar, A.R.; Elhady, A.M.A.; Sabiha, A.; Izzularab, M.A. Location estimation of coating defects and mitigation of induced AC voltages along buried gas pipeline. IET Sci. Meas. Technol. 2018, 12, 209–217. [Google Scholar] [CrossRef]
- ASME SA 106 Grade B; Carbon Steel Seamless Pipe. ASME: New York, NY, USA, 2011.
- Kim, M.G.; Lim, B.T.; Kim, K.T.; Chang, H.Y.; Park, H.B.; Kim, Y.S. Enhancing the reliability of coating flaw detection for pipes buried in soil using a multi-electrode detector. Corros. Sci. Technol. 2020, 19, 265–280. [Google Scholar] [CrossRef]
- Chang, H.Y.; Kim, K.T.; Lim, B.T.; Kim, K.S.; Kim, J.W.; Park, H.B.; Kim, Y.S. Protection performance simulation of coal tar-coated pipes buried in a domestic nuclear power plant using cathodic protection and FEM method. Corros. Sci. Technol. 2017, 16, 115–127. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Defect Location, m | 3 | 10 | 18 | 24 |
| Defect size, cm2 | 5 | 5 | 10 | 5 |
| Parameter | Name | Value |
|---|---|---|
| Sigma | Electrolyte conductivity | 0.004 S/m |
| ECS vs. ref | Carbon steel potential vs. reference | −1, −2.5, −3, and −4.5 V(CSE) |
| Eeq_CS | Equilibrium potential of carbon steel | −0.6 V(CSE) |
| io_CS | Exchange current density, cathode | 3.09 × 10−7 A/cm2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, S.-H.; Yoo, Y.-R.; Kim, Y.-S. Effect of Electrode Spacing on the Detection of Coating Defects in Buried Pipelines Using Direct Current Voltage Gradient Method. Coatings 2023, 13, 1471. https://doi.org/10.3390/coatings13081471
Choi S-H, Yoo Y-R, Kim Y-S. Effect of Electrode Spacing on the Detection of Coating Defects in Buried Pipelines Using Direct Current Voltage Gradient Method. Coatings. 2023; 13(8):1471. https://doi.org/10.3390/coatings13081471
Chicago/Turabian StyleChoi, Seung-Heon, Young-Ran Yoo, and Young-Sik Kim. 2023. "Effect of Electrode Spacing on the Detection of Coating Defects in Buried Pipelines Using Direct Current Voltage Gradient Method" Coatings 13, no. 8: 1471. https://doi.org/10.3390/coatings13081471