1. Introduction
The asphalt pavement mechanics analysis method used in flexible pavement design is used as an effective method to predict the performance of the asphalt pavement, and this method presents many advantages, e.g., convenience, low analysis cost, and more factors that influence the pavement’s performance [
1,
2]. The material characterization method and its accuracy [
3] greatly influence the mechanistic analysis and pavement structure design of asphalt pavements. Therefore, before pavement designing, the pavement material characteristic and pavement load response should be studied and analyzed. The asphalt pavement material is a viscoelastic system; the asphalt mixtures manifest more complex linear viscoelastic (LVE) characteristics under small strain conditions (100–150 με) due to the combination of the viscoelastic asphalt binders and the aggregate skeleton [
4,
5,
6,
7,
8,
9,
10]. It is necessary to understand the rheological property for analyzing the material response, material selection, and pavement design concerning calculating the required pavement thickness [
8,
11,
12,
13,
14,
15].
Various methods could be adopted to characterize the viscoelastic properties and predict the structural performance and dynamic response in pavement design [
16]. In the Mechanistic—Empirical Pavement Design Guide (MEPDG), the dynamic modulus is (1) adopted to characterize the viscoelastic property of the asphalt mixture and (2) determine the structural capacity of pavements; it is also (3) the most fundamental input parameter for pavement design and material property evaluation of asphalt pavement. The dynamic modulus test result could be used to (1) define the stiffness characteristic as a function of loading frequency and temperature [
17]; (2) characterize the LVE behavior (temperature−time-dependent property) of the asphalt mixture under various temperatures and loading frequencies; (3) calculate the stress (or strain) response of the asphalt pavement structure under desired dynamic loading and climate conditions in the pavement structural design [
18]; (4) predict the asphalt pavement performance [
18]. Therefore, while designing flexible pavement and evaluating the pavement’s structural performance, the phase angle is one of the most critical material properties [
19,
20].
The master curves of the dynamic modulus and phase angle can be built by employing the time−temperature superposition principle (TTSP) [
21,
22,
23,
24,
25,
26]. The reasons for constructing master curves are as follows [
27]: (1) predicting the dynamic modulus and phase angle at temperatures and loading frequencies when test equipment or time is limited; (2) modeling the asphalt pavements under all possible climates and loading conditions; (3) comparing the performance of asphalt mixtures. The master curve provides the main dynamic parameters of viscoelastic materials, and the phase angle can better reflect the material’s relaxation characteristics [
28]. If the same dynamic modulus of the materials is the same, but the phase angles are different, this means that the materials are different [
29]. The degree of viscous and elastic behavior of the materials at a particular temperature and frequency is referred to as the phase angle. As one of the principal measures of viscoelastic behavior, the phase angle reflects the phase delay between the amplitude of applied stress and corresponding strain [
30]. In addition, phase angle (δ) could be used to divide the complex modulus (
E*) into its two inherent parts: storage and loss modulus. Therefore, determining the δ-value is essential for superior pavement analysis.
The experimental data of phase angle can be fitted into mathematical models [
31] for the continuous master curve. During the past decades, a consistent number of studies have been conducted to develop master curve modeling solutions for describing the phase angle evolution for asphalt binder and mixture [
6,
8,
11,
12,
14,
32,
33,
34]. Those models could be used to predict the stiffness of a material at temperatures and frequencies that are beyond the experimental scope [
35]. The concept of predicting phase angle from the slope of the complex modulus versus frequency, named the K−K relations, was first suggested by [
36]. Study [
37] established the function form for the phase angle master curve based on the K−K relations using the sigmoidal model and generalized sigmoidal model. Based on dynamic modulus data for asphalt mixtures, reference [
3] generated the phase angles and assessed the accuracy of the predictions using the Black space diagram. Research [
38] performed the aging test in the laboratory to investigate the effect of aging on the dynamic modulus and phase angle; phase angle master curves were successfully predicted over a range of ages, validating the K−K relations—based phase angle prediction model. Study [
39] provided formulae that could be used to analyze master curves of both dynamic modulus and phase angle using a similar basis for sigmoidal forms. Works [
36,
39,
40] demonstrated that the phase angle could be modeled using the sigmoidal function. The research performed in [
37] proposed a sigmodal equation and regression parameters to determine the phase angle master curve from the dynamic modulus vs. frequency data.
The PU mixture is a new mixture for pavement engineering which possesses higher road performance. Many studies were performed to evaluate the improvement of the road performance of the PU mixture, the viscoelastic and rheology properties of the PU mixtures were studied by researchers [
41], but the phase angle and the construction of the master curve of the PU mixture attract little attention. The phase angle is an important parameter to reflect the inherit viscoelastic property and the influence of higher temperature or lower loading frequency on the performance of the PU mixture; therefore, it is important to study the phase angle and the construction of the master curve of the PU mixture before application.
In this paper, five different mathematical models, five shift factor equations, and four error minimization methods for fitting the phase angle master curve of the asphalt mixture were introduced to fit the tested phase angle of the PU mixture. Error analysis and goodness-of-fit statistics were used to evaluate the accuracy of the extrapolation calculations. Firstly, the fitting results under different error minimization methods were compared with the same prediction models and shift factor equation for determining the effect of the error minimization method on the accuracy of fitting results. Secondly, after determining the most effective error minimization method, the influence of different shift factor equations on the fitting accuracy for different prediction models was evaluated. Finally, the phase angle master curves under different models with the selected shift factor equations were graphically and statistically compared and analyzed. This paper aims to provide a simple recommendation on the selection of the proper master curve model and shift factor equation combination for the phase angle master curve construction of the PU mixture for a follow-up study.
2. Materials and Methods
2.1. Material
The gradation of the PU mixture used in this study was dense gradation, and the aggregate was basalt aggregate. The gradation and the binder content were determined by using the SBS-modified asphalt binder according to the Marshall method, then the PU binder replaced the SBS–modified asphalt with the same content to fabricate the specimens. According to the Marshall test results, the gradation was plotted, shown in
Figure 1. The
x–axis was in 0.45 power scale, and the
y–axis was in arithmetic scale.
The optimum ratio of PU binder to aggregate was 5.3%, and the PU binder, which is a kind of single component PU, was supplied by Wanhua Chemical Group Co., Ltd. (Yantai, China). The PU binder solidified after being cured in wet conditions.
The specimen fabricating and dynamic modulus test both followed the procedure and requirements in the literature [
42]. The specimens were compacted 100 times by the Superpave gyratory compactor (SGC) (Pine Test Equipment, Inc., Grove City, PA, USA); after compacting, the specimens were cored and sawed into the dimension of 150 mm in height and 100 mm in diameter. The test was performed on the Asphalt Mixture Performance Tester (AMPT, Pine Test Equipment, Inc., Grove City, OH, USA) based on AASHTO: TP–62 (2009); the strain control mode and the sinusoidal loading waveform were adopted in the test. A strain limitation of 75–125 με was used during the test procedure to keep the specimens within the elastic range. The phase angle of the PU mixture was measured in the experiment at six temperatures (5, 15, 25, 35, 45, 55 °C) and eight loading frequencies (0.1, 0.5, 1, 2, 5, 10, 20, 25 Hz). The average phase angle values of four replicates were used for fitting the master curve.
2.2. Methodology
By horizontally shifting data acquired at multiple temperatures and frequencies to build a single smooth and continuous master curve at the arbitrary reference temperature, the phase angle data may be utilized to construct the master curve, following the theoretical foundation of TTSP. The models used for constructing the phase angle master curve also had related equations that could be used to construct the phase angle master curve. In this paper, five models were used to build the phase angle master curve of the PU mixture, and the reference temperature in this study was set as 20 °C.
2.2.1. Phase Angle Fitting Model
According to the findings of research [
36], the relationship of complex modulus against frequency as shown in Equation (1), which is expressed in terms of the approximate K−K relations [
43,
44], could be used to establish the phase angle master curve’s function form.
where
u is the integral variable.
The phase angle master curve could describe the elastic and viscous characteristics of the asphalt mixture. In this paper, five models were adopted from the corresponding dynamic modulus master curve equations and shown as follows:
Model 1: Standard Logistic Sigmoid Model
The Standard logistic Sigmoid model (SLS) of phase angle [
45] can be seen in Equation (2).
where
δ(fr) is the phase angle in °;
fr is the load frequency at the reference temperature in Hz;
α,
β, and
γ are the fitting parameters.
β and
γ are the shape parameters of the model curve, which describe the shape of model 1 as depicted in
Figure 2. In Figures 2–12 and 20, the
x-axis represents the loading frequency in logarithm form, the
y-axis represents the phase angle in arithmetic form.
Figure 2.
Graphical interpretation of Model 1.
Figure 2.
Graphical interpretation of Model 1.
Figure 3.
Graphical interpretation of Model 2.
Figure 3.
Graphical interpretation of Model 2.
Figure 4.
Graphical interpretation of Model 3.
Figure 4.
Graphical interpretation of Model 3.
Figure 5.
Graphical interpretation of Model 4.
Figure 5.
Graphical interpretation of Model 4.
Figure 6.
Graphical interpretation of Model 5.
Figure 6.
Graphical interpretation of Model 5.
Model 2: Generalized Logistic Sigmoidal (GLS) Model
The GLS model, which was introduced by [
46], could represent and fit the asymmetric evolution of phase angle data. Based on the K−K relations, phase angle can be easily computed based on [
36] as can be seen in Equation (3):
where
α,
β, and
γ are the fitting parameters;
λ is the additional fitting parameter which is used to depict the asymmetrical shape of the function.
β and
γ describe the shape of model 2 as depicted in
Figure 3.
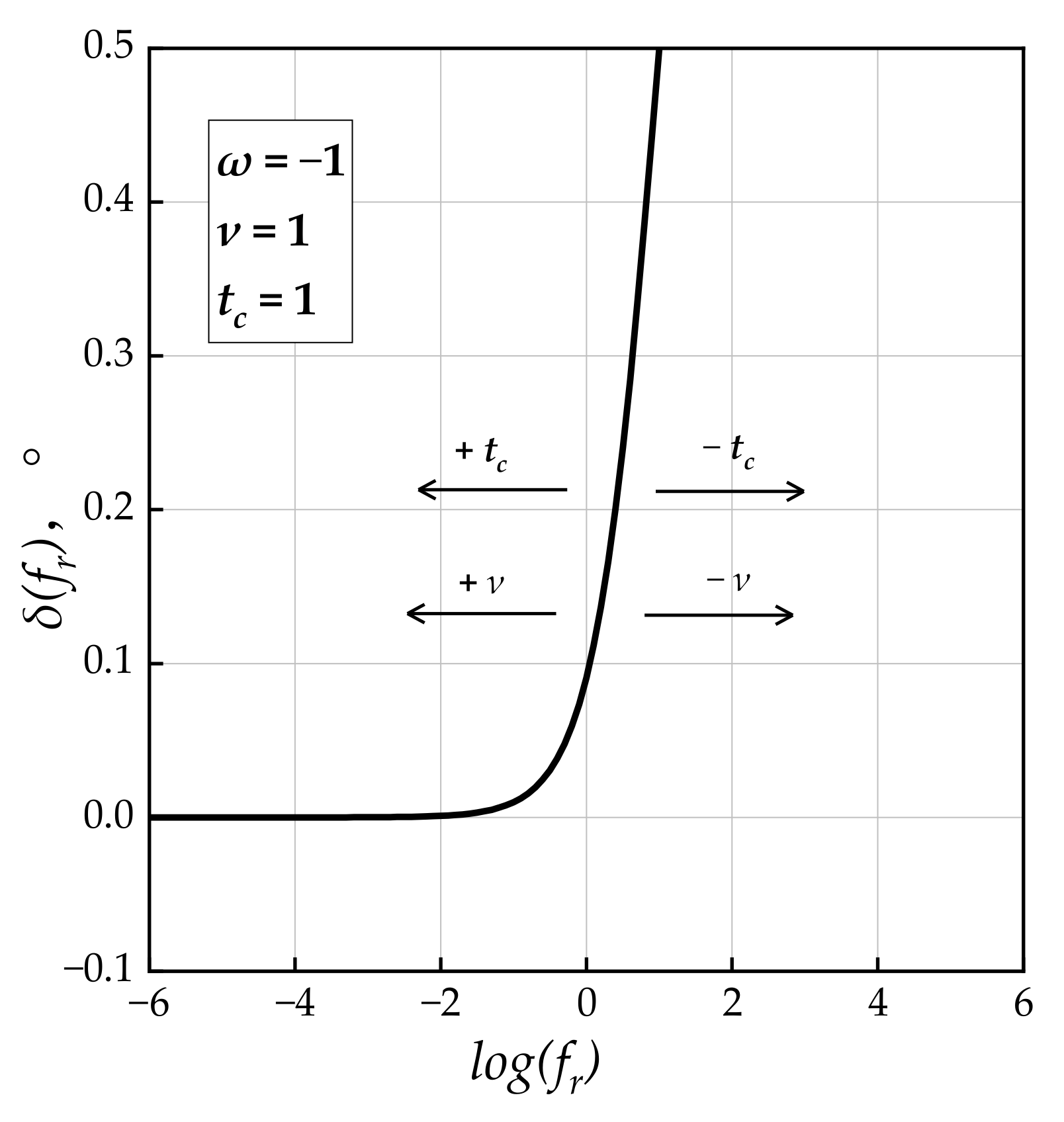
Model 3: Christensen Anderson and Marasteanu Model (1999)
Model 3 for phase angle expressions is given by the following Equation (4). Note that the equation of the phase angle [
36] was calculated using the same Booji and Thoone approximation that was presented in the previous section.
where
v,
w, and
tc are the fitting parameters and
v, and
tc could describe the shape of Model 3 as depicted in
Figure 4.
It is also worth noting that the sigmoidal structure is absent from the mathematical expression of Model 3 [
47,
48]. The exponential-based function shown by Equations (2) and (3) present a smooth bell-shaped curve when used to fit data. However, as can be seen in Equation (4), Model 3 provides [
48] a combination of logarithm and exponential functions that deviates from a bell-shaped pattern. Therefore, this means that the phase angle master curves may be remarkably different from the ones generated by Models 1 and 2.
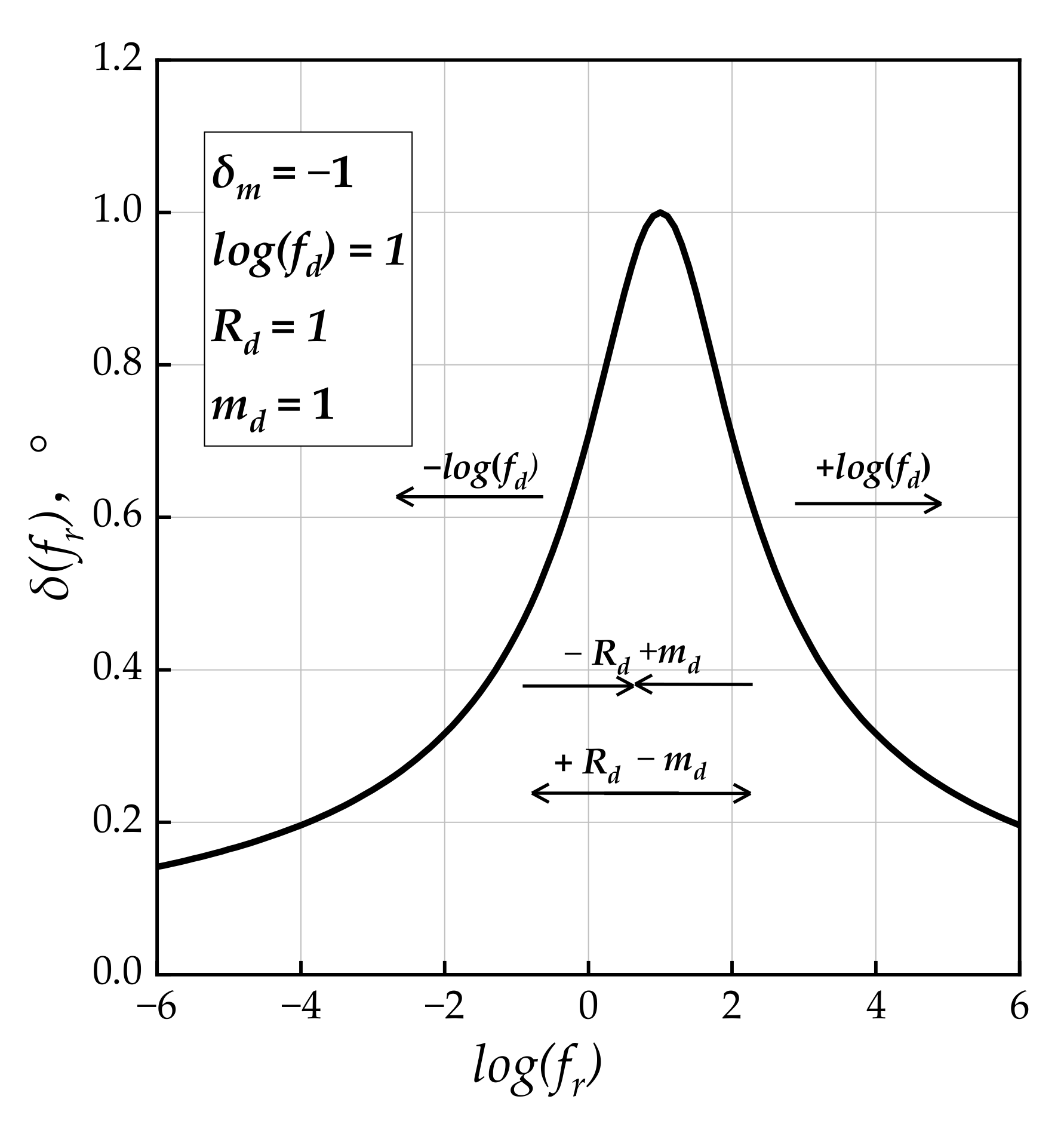
Model 4: Modified CAM Model (2001)
To improve the compatibility with experimental data on the phase angle, Zeng and his co-authors proposed a modified version of Model 3 [
8]. An empirical mathematical expression for phase angle was introduced based on Equation (5) [
8], which was provided with the model function of phase angle.
where
δm is the phase angle constant at
fd;
fd is the location parameter with a dimension of frequency in Hz;
Rd and
md are shape parameters, which could describe the shape of Model 4 as shown in
Figure 5.
It needs to be mentioned that Model 4 does not take into consideration the straightforward relationship between the phase angle and the corresponding phase angle, as shown in [
36]. This model’s fundamental drawback is that the equation for the phase angle relies on an empirical approximation because of the varying values in Equation (5). However, a better fitting of the experimental results was observed compared to Model 3 in different studies [
8,
48], likely as a consequence of the increased number of parameters.
Model 5: Sigmoidal CAM Model (SCM Model)
Given the mathematical limitations of Model 3, this paper introduced a further modified version of the latter [
48], which combines the CAM model’s simplicity and reasonable physical meaning (e.g.,
w means the velocity of phase angle and
v represents relaxation spectrum) with the benefit of the sigmoidal function. Based on Equation (6) [
36], the model is named the Sigmoidal CAM Model (SCM) of phase angle, and can be expressed as follows:
where
v,
w, and
tc are consistent with the parameters of Model 3, and
z is the newly introduced fitting parameter. The parameters
v,
z,
w, and
tc related to the shape of Model 5 are depicted in
Figure 6.
2.2.2. Shift Factor Equation
To generate a phase angle master curve, data obtained at different temperatures and frequencies must be related to each other to form a unique curve of material stiffness representing the stiffness of the material. The shift factor was temperature-dependent, reflecting the temperature-specific translation of the modulus curve used to generate the overall master curve. The phase angle changes as a function of temperature, and its general form is given by Equation (7). By using the TTSP while modeling the master curve, the phase angle at varying test temperatures may be shifted to the lower frequency of the master curve. The
fr value is the frequency equivalent of the experimental temperature relative to the reference value. Once the shift factor is known, Equation (7) could be used to calculate the new, lower frequency.
where
log(f) is the frequency in experiment temperature;
log(fr) is the reduced frequency in reference temperature.
Five commonly used shift factor equations were employed in this research, includingthe Log-linear equation, Polynomial equation, Arrhenius equation, WLF equation, and Kaelble equation.
Equation (1): Log-Linear Equation
The use of the log-linear equation is one of the most popular temperature-shifting methods for asphalt mixtures. For many binders,
log(
αT) is found to vary linearly with temperature below 0 °C, as stated by Christensen and Anderson [
40], and this similar relationship has been regarded appropriate for asphalt mixture at low to moderate temperatures [
49]. The log-linear equation for calculating the shift factor is
where
log(αT) is the shift factor,
T is the temperature in °C,
Tr is the reference temperature (20 °C), and the constant
C is calculated from the results of the experiment.
Equation (2): Polynomial Equation
The Polynomial equation [
34,
50] may be stated as follows and is shown to be a good fit for the shift factors across a board temperature range:
where
a and
b are the parameters of regression.
Equation (3): Arrhenius Equation
Equation (11) shows the Arrhenius equation [
51] which is used for calculating the shift factor:
where
C is a constant, and the Arrhenius equation which can describe the behavior of the material below
Tg [
52] has only one constant that needs figuring out.
Equation (4): Williams−Landel−Ferry Equation
To evaluate the shift factor of the asphalt mixture, the Williams−Landel−Ferry (WLF) equation [
53,
54] is often employed to describe the relationship between the shift factor and temperature above
Tg:
where
C1 and
C2 are the two parameters of regression.
Equation (5): Kaelble Equation
Equation (13) illustrates that the Kaelble equation, a modified version of the WLF equation, may be employed to describe the shift factor−temperature relationship below
Tg,
where
Cl’ and
C2’ are the two regression parameters.
2.3. Error Minimization Method
Minimizing the sum of the error between the predicted data and measured data is the goal of regressing the parameters of the aforementioned models. To construct the master curves deriving from the experimental data, the nonlinear least squares regression analysis was integrated into the Microsoft Excel Solver’s error minimization procedure. Due to cases fitting well, the constraint range of the variables was not defined. The Generalized Reduced Gradient (GRG) Nonlinear was chosen as the method for solving the problem. Furthermore, each fitting procedure began with identical initial settings for fitting parameters. The variables were optimized such that the phase angle master curve had maximum overlap with the measured results.
To evaluate five phase angle model’s fitting divergence and minimize the error between the predicted and measured phase angle, four different error minimization methods were applied to determine the “goodness of fit” [
55]: (1) Se/Sy minimization, as in Equations (14) and (15), (2) R
2 maximization as in Equation (16), (3) the Sum of Square Error (SSE) minimization as in Equation (17), and (4) Error
2 minimization as in Equation (18).
The following definitions [
35] apply to both standard error of estimate and standard error of deviation:
where
xi is the measured phase angle,
is the predicted phase angle, and
is the mean value of the measured phase angle.
To compute the error, the R
2 of a given model may be calculated using Equation (16):
where
n is the sample size and
p is the number of parameters to be estimated.
The Sum of Square Error (
SSE) between measured values after shifting
and predicted values
is shown in Equation (18),
where
is the experimentally measured phase angle in ° and
is the predicted phase angle predicted by different master curve models and shift factor equations in °. The
SSE parameter could represent the relative error between the predicted and experimental measured phase angle. The coefficients of the models and shift factor equations were fitted to minimize
SSE, defining the optimal results of the master curves.
A simultaneous minimization approach can be performed to fit the experimental results as can be seen in Equation (18),
where the parameters correspond to those in the previous equation. The
Error2 value is the absolute difference between the predicted and the experimentally measured phase angle.
2.4. Fitting Process
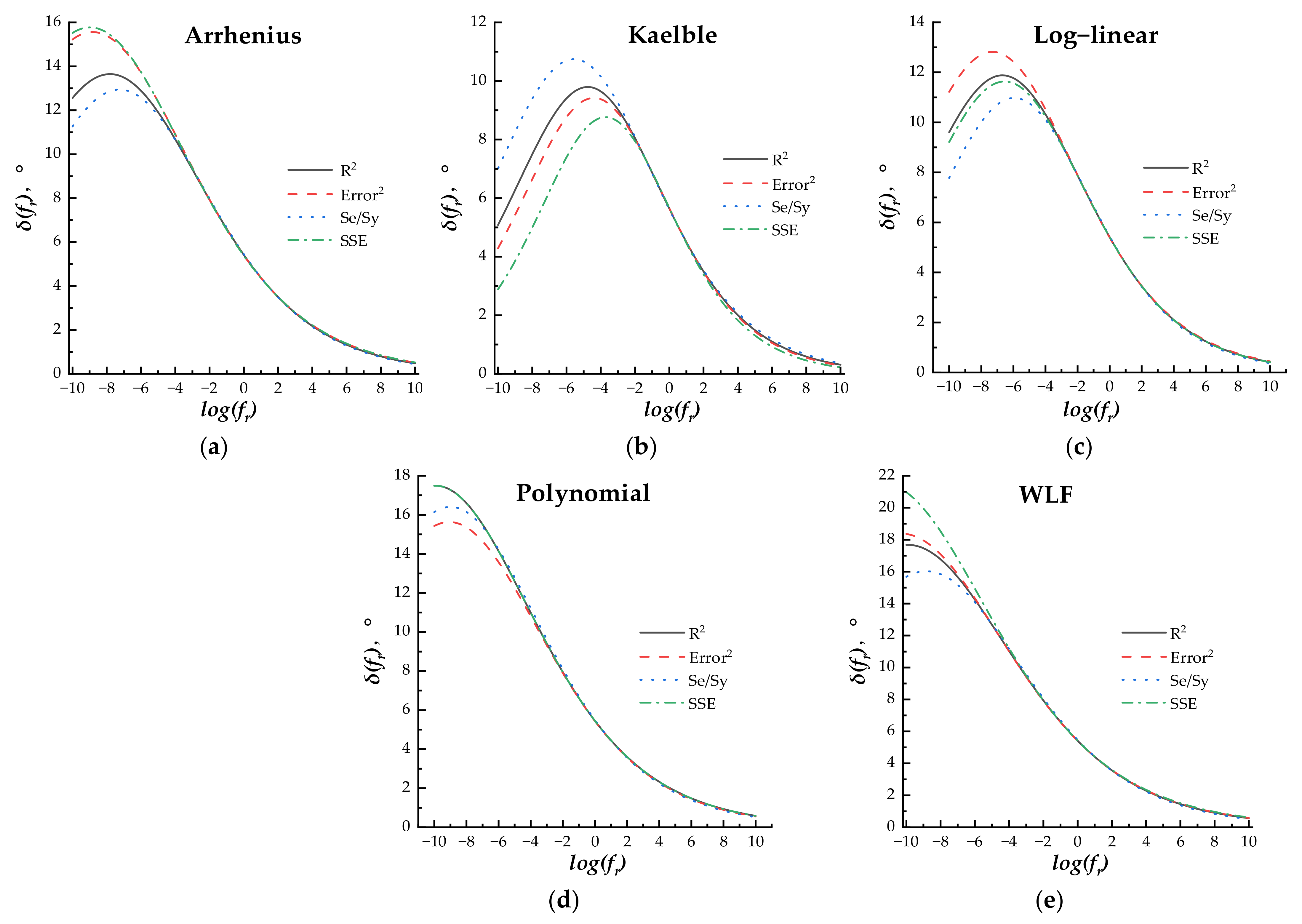
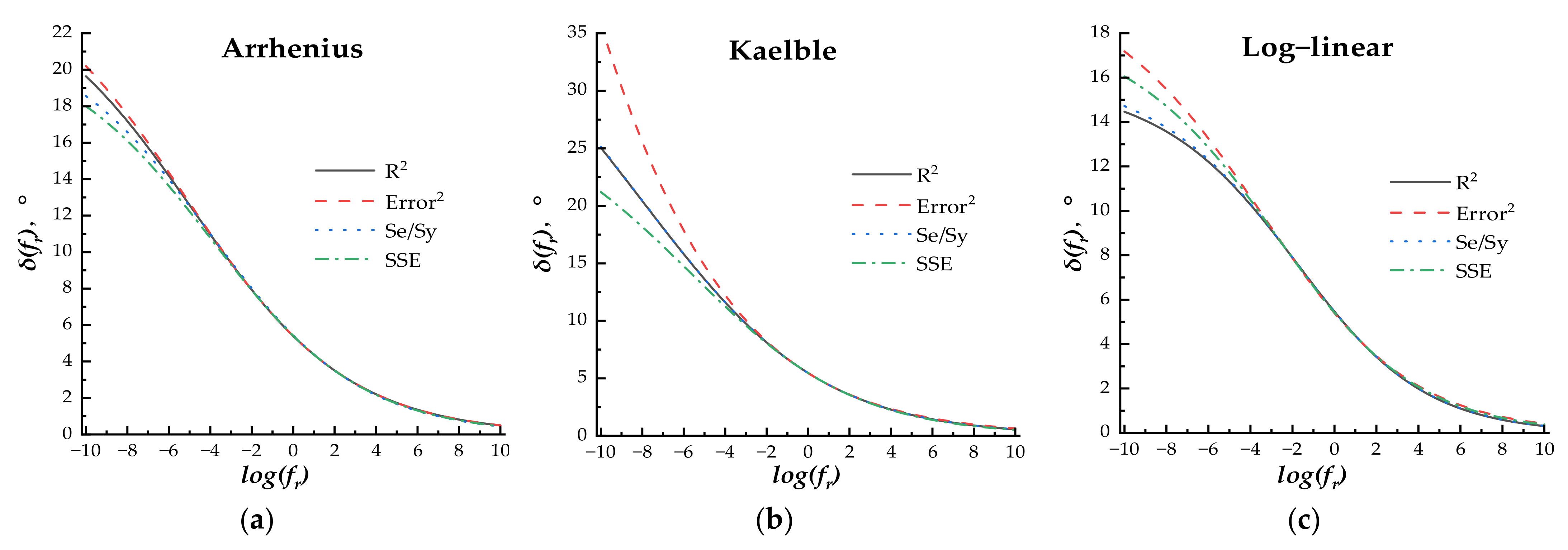
The fitting process is shown as follows: (a) determining the effect of four error minimization methods on the fitting results. Under different phase angle master curve models, the shift equation factors log(αT) in different shift factor equations were incorporated into the master curve model equation by Equation (9); then, the error minimization methods were separately used as the main constraint for fitting the measured phase angle data and minimizing the error between the predicted and measured phase angle data; the other three error minimization methods were used as the additional constraints. The difference between the phase angle master curves fitted by different error minimization methods was compared and analyzed to determine the more accurate error minimization method for each master curve model. (b) After determining the optimum error minimization method, the effect of the shift factor equation on the fitting results was analyzed by comparing the predicted and measured phase angle, and the most accurate shift factor equation was recommended for each master curve model. (c) Under the determined optimum shift factor equation, the difference between all phase angle master curve models was compared and analyzed to recommend the most accuracy model and shift factor equation for fitting the phase angle data.
5. Conclusions
This paper adopted five master curve models, five shift factor equations, and four error minimization methods for the phase angle of the asphalt mixtures to evaluate the feasibility of constructing the phase angle master curve for the PU mixture. Three steps were performed to evaluate the effectiveness of the error minimization method, shift factor equation, and master curve model sequentially. According to the discussion above, some conclusions could be concluded as follows.
- (1)
When the loading frequency was higher than 10−3 Hz, the master curves fitted by different error minimization methods under the same master curve model and shift factor equation exhibited little difference. The R2 error minimization method, including R2 (>0.99) as the main constraint, Se/Sy (<0.05), SSE (<0.05), and Error2 (<0.05) as the additional constraints, was used for parameter regression.
- (2)
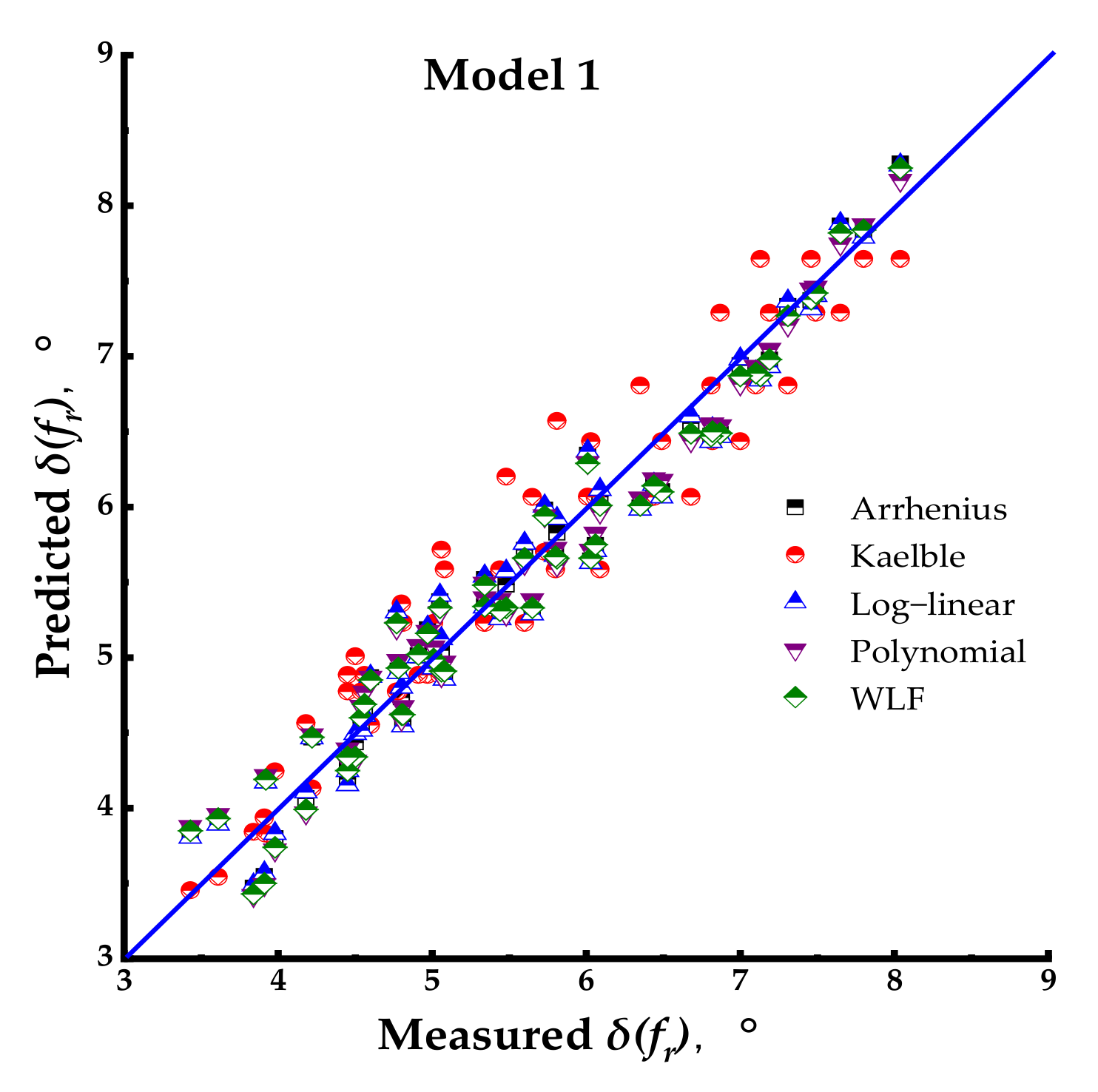
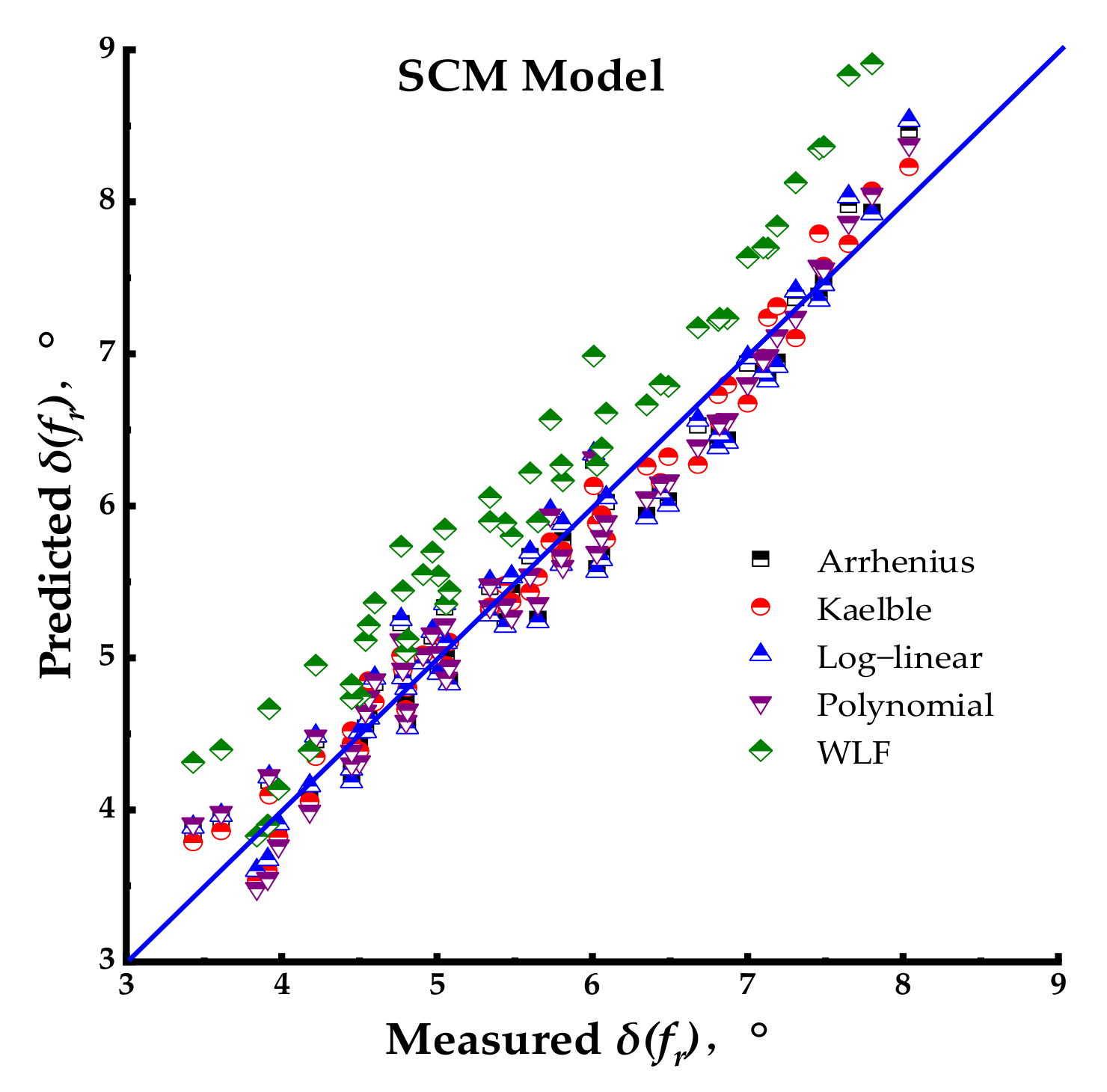
The LOE method, linear fitting method, and Pearson linear correlation analysis proved to be effective methods to evaluate the precise fitting of the phase angle from the test data.
- (3)
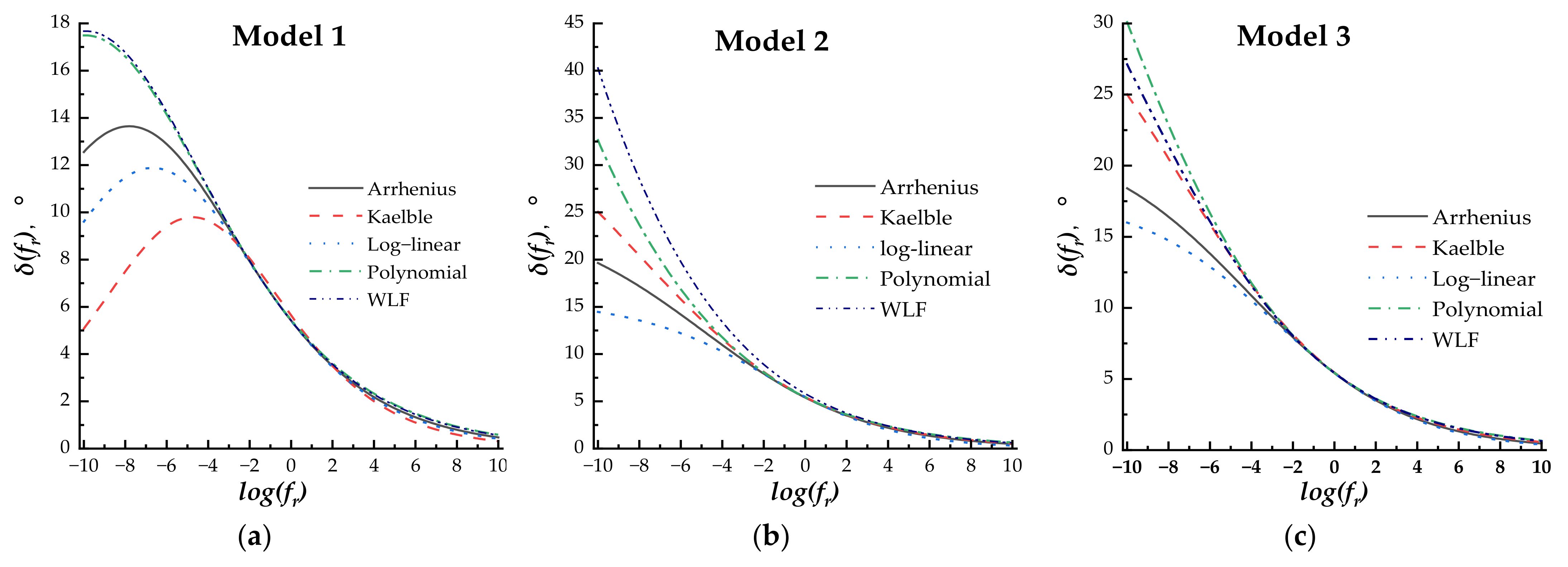
According to the linear fitting and statistics analysis, the Kaelble shift factor equation had the strongest correlation with the measured result for Models 2, 3, 4, and 5. Then, for Model 1, the Polynomial shift factor equation could provide more accurate predictions than the other equations.
- (4)
The combination of Model 3 and the Kaelble shift factor equation was recommended for fitting the phase angle master curve of the PU mixture.
- (5)
The trend line R2 values of the linear fitting results for the PU mixtures were much higher than those with the same master curve models for the asphalt mixture, which indicated that the PU mixture had lower temperature sensitivity than the asphalt mixture.
- (6)
For all the phase angle master curves, Model 5 had the highest values, Models 2 and 3 had the same trend, Model 1 had the lowest value, and all four models decreased monotonously with the increase in the loading frequency. Model 4 first decreased and then increased with the increase in the loading frequency. When the loading frequency ranged between 10−3 and 103 Hz, all the master curve models exhibited insignificant differences.
- (7)
The phase angle master curve did not show the “Bell” shape as that of the asphalt mixture and did not have the highest phase angle values at intermediate loading frequency. For the asphalt mixture, at higher loading frequency or lower temperature, the asphalt mixture exhibited elastic properties and was mainly subject to the asphalt. With the increase in temperature or the decrease in loading frequency, the asphalt became soft, and the asphalt mixture exhibited viscosity and was subject to the aggregate skeleton. For the PU mixture, the viscous property component increased with the increase in temperature or the decrease in loading frequency, but the PU mixture was still subject to the PU, which was different from that of the asphalt mixture. The phase angle behavior of the PU mixture complied more with the characteristic of the viscoelastic material compared with the asphalt mixture.
In this paper, the compared five master models and five shift factor equations exhibited significant differences when the loading frequency was lower than 10−3 Hz. Therefore, the phase angle master curve models introduced from the asphalt mixture were only suitable for the PU mixture when the loading frequency was higher than 10−3 Hz. There are few studies conducted about the phase angle master curve of the PU mixture; this paper analyzed the influence factors during the fitting process of the phase angle of the PU mixture and contributed to the construction of the phase angle master curve and prediction of the characteristic of the PU mixture at extreme temperatures or loading frequencies, which could be used to predict the road performance of the PU mixture and determine the proper pavement structure combined with the PU mixture layer.
More attention is needed for studying the phase angle master models and shift factor equations to extrapolate to frequency ranges lower than 10−3 Hz. More phase angle master curves and shift factor equations should be compared in the future for a better understanding of the viscoelastic property of the PU mixture.

 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}