3.1. Applied Force Analysis of Cycloid Pinwheel Mechanism
Based on the principle and geometric characteristics of the cycloid drive, and according to the design parameters in
Table 1, a theoretical static force analysis model of the cycloid pinwheel is established, as shown in
Figure 6. Here, point
O is the center of rotation of the input crank shaft and the center of the pin teeth distribution,
Oc is the center of the cycloid gear, point P is the tangent point between the base circle of the cycloid gear and the base circle of the pinwheel, and
Φin is the input crank angle. From the X-axis to the counterclockwise direction, the first pin tooth is located in the plus X-axis and the others are in order from No. 1 to No. 11. Similarly, the numbering of the pin is also from the counterclockwise direction, in order from No. 1 to No. 6 of the output pin.
In the theoretical force model proposed in this paper, the cycloid gear is regarded as a plane motion, so the influence of axial thickness on tooth contact is not considered. At the same time, the effect of elastic deformation is not taken into account, and all the components are set as rigid bodies.
Figure 7 shows the schematic diagram of the force analysis of the cycloid gear, and
Figure 8 shows the force analysis of the crank. At this time, the crank shaft input angle
Φin is 45 degrees.
FC is the crank input shaft force on the cycloid gear, the force extension line through the eccentric point
Oc, and with the input crank shaft eccentric direction angle of ε.
FN is the pin tooth force on the cycloid gear,
FK is the output-pin force on the cycloid gear.
lN is the force arm of the pin tooth force;
lK is the force arm of the output-pin force. αi is the pin tooth force and X-axis line angle.
Tin is the input torque and
FC′ is the force of the cycloid gear on the input crank shaft, which is equal in magnitude and opposite in direction to the
FC value.
Taking the input angle in the figure as an example, the ideal cycloid pinwheel drive is a full tooth contact, and the contact force exists only between the pin tooth and the output pin within 180 degrees from the direction of the input crank eccentricity. The direction of the force FN on all the pin teeth in contact passes through point P, while the direction of the force FK on the output pin in contact is parallel and opposite to the direction of the input crank eccentricity.
According to the force analysis diagram of each component, the equilibrium equation between the component’s contact force and its own moment can be listed. With the center of the cycloid gear
Oc as the center point, the balance equation of the force on the cycloid gear is [
22]:
where
i is the serial number of the pin tooth and
j is the serial number of the output pin. By the geometric characteristics of the cycloid pinwheel drive mechanism, the pin tooth force and its force arm, the output-pin force and its force arm are proportional, and the proportionality constant is
kN,
kK. According to the cycloid pinwheel transmission dynamics, the input torque is related to the output torque by the following equation:
where,
m is the mechanism transmission ratio, solving the combined force balance equation under the conditions of given mechanism design parameters and input torque, the meshing contact force of the pin tooth, output pin and cycloid gear can be obtained at any crank angle. The contact force distribution of the transmission components is calculated by taking 1000 N·mm as an example of the applied load torque.
Figure 9 and
Figure 10 show the distribution of the pin tooth contact force
FNi and the output-pin contact force
FKi in each tooth at different input angles. It shows that the contact areas of the pin tooth and the output pin change with the position of the input angle, and the magnitude of the value is proportional to the length of the force arm.
Figure 11 and
Figure 12 show the changes of input crank contact force
FC under different input angles. Different input angle position has little effect on the crank contact force, the value of which fluctuates up and down around 960 N. The values of the input crank contact force components
FCX and
FCY are presented as sinusoidal function curves with different phases.
According to the solution, the engagement force between the cycloid gear, the pin tooth and the output pin can be obtained, as well as the regional distribution of the engagement force on the tooth profile of the cycloid gear. Then the distribution of the contact stress
σH on the cycloid gear tooth profile can be solved according to the Hertz contact equation. The contact stress between the cycloid gear and the pinwheel is calculated as Equation (8).
where,
,
,
ρsi is the integrated radius of curvature,
ρi is the actual tooth profile radius of curvature,
E1,
ν1 and
E2,
ν2 are the modulus of elasticity and Poisson’s ratio for the cycloid gear and pin teeth materials, and
b is the cycloid gear width.
3.2. Isogeometric Contact Analysis of Cycloidal Pinwheel Mechanism
The isogeometric analysis uses an accurate geometric model based on NURBS, and its own control mesh can be refined and analyzed without changing the geometry, which avoids the problem of model reconstruction and dividing a distorted mesh affecting the model profile and analysis accuracy as in the finite element method. And the IGA uses the higher-order NURBS basis function, which has better characteristics than the Lagrangian basis function, and has the properties of non-interpolation and differentiability [
23,
24]. The basic flowchart of isogeometric contact analysis is shown in
Figure 13.
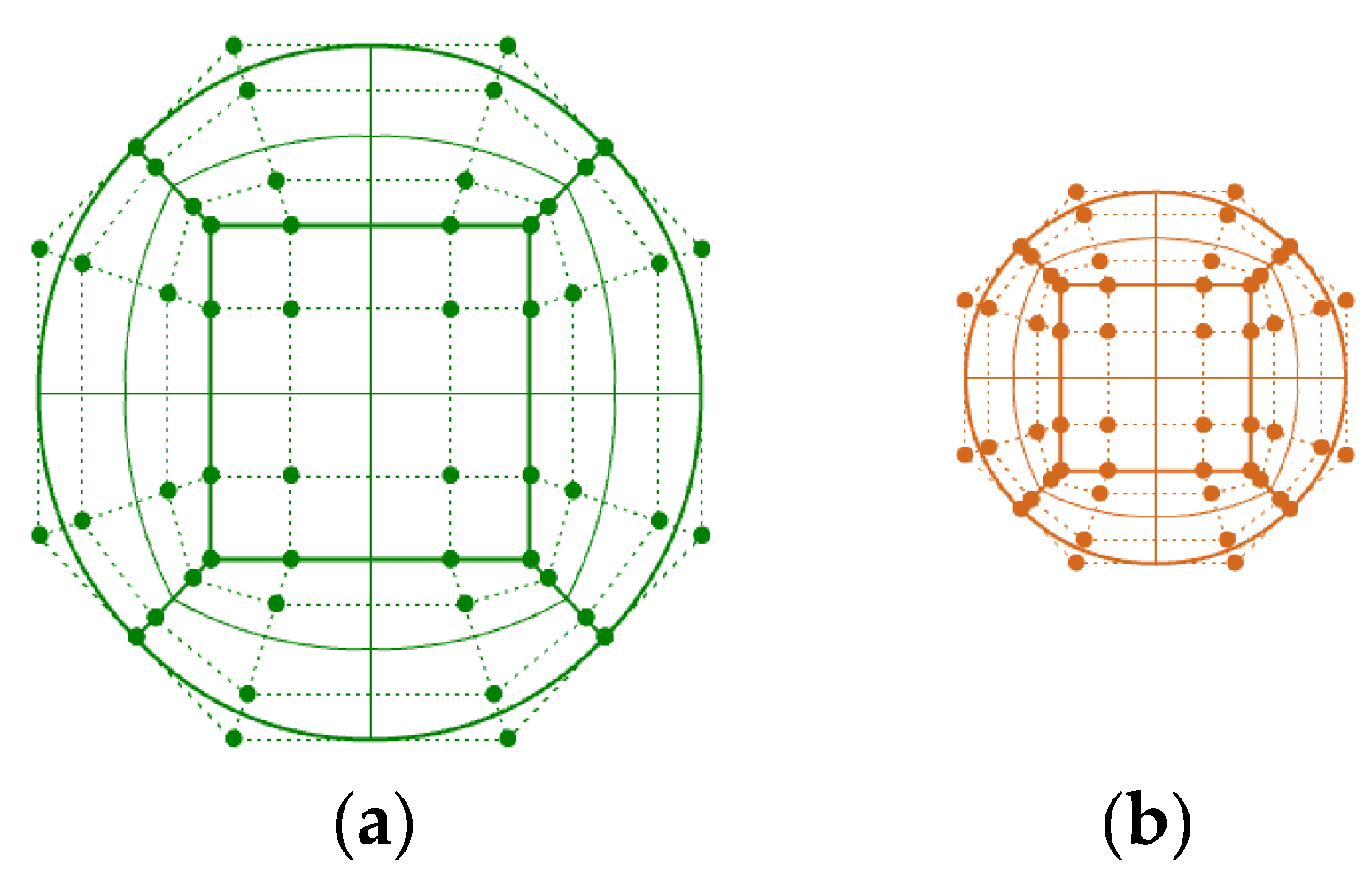
The first step of isogeometric analysis is to input the geometric model. For the cycloid drive mechanism analyzed in this paper, it is more difficult to express the cycloid gear with holes directly by NURBS modeling, so it is still necessary to carry out structured element division based on the cycloid gear NURBS surface established in the previous paper, and divide the output pin hole part of the cycloid gear into different NURBS slices before stitching. The quarter of the cycloid gear NURBS surface shown in
Figure 14 is re-divided, with the order of the basis function in each NURBS slice set as second order and the surface containing four control points in each direction. According to the symmetry, the surfaces are arrayed and the coordinates of the overlapping boundary control points are changed to construct the initial NURBS tooth surface of the complete cycloid gear as shown in
Figure 15a. The refined model is shown in
Figure 15b, and the number of elements per surface sheet is 100. The pin tooth and output pin surfaces are constructed in the same way, while the cross section is divided into five NURBS slices for the subsequent application of boundary conditions, and their initial cross sections are shown in
Figure 16. The same k-refinement is used, and each surface slice contains 100 elements after refinement, as shown in
Figure 17.
The created NURBS geometry model is saved in IGES format for data storage and exchange, and then entered into the IGA contact analysis process. Define the material density of the cycloid gear, pin tooth and output pin as 7800 kg/m
3, the modulus of elasticity as E = 210 GPA and Poisson’s ratio as
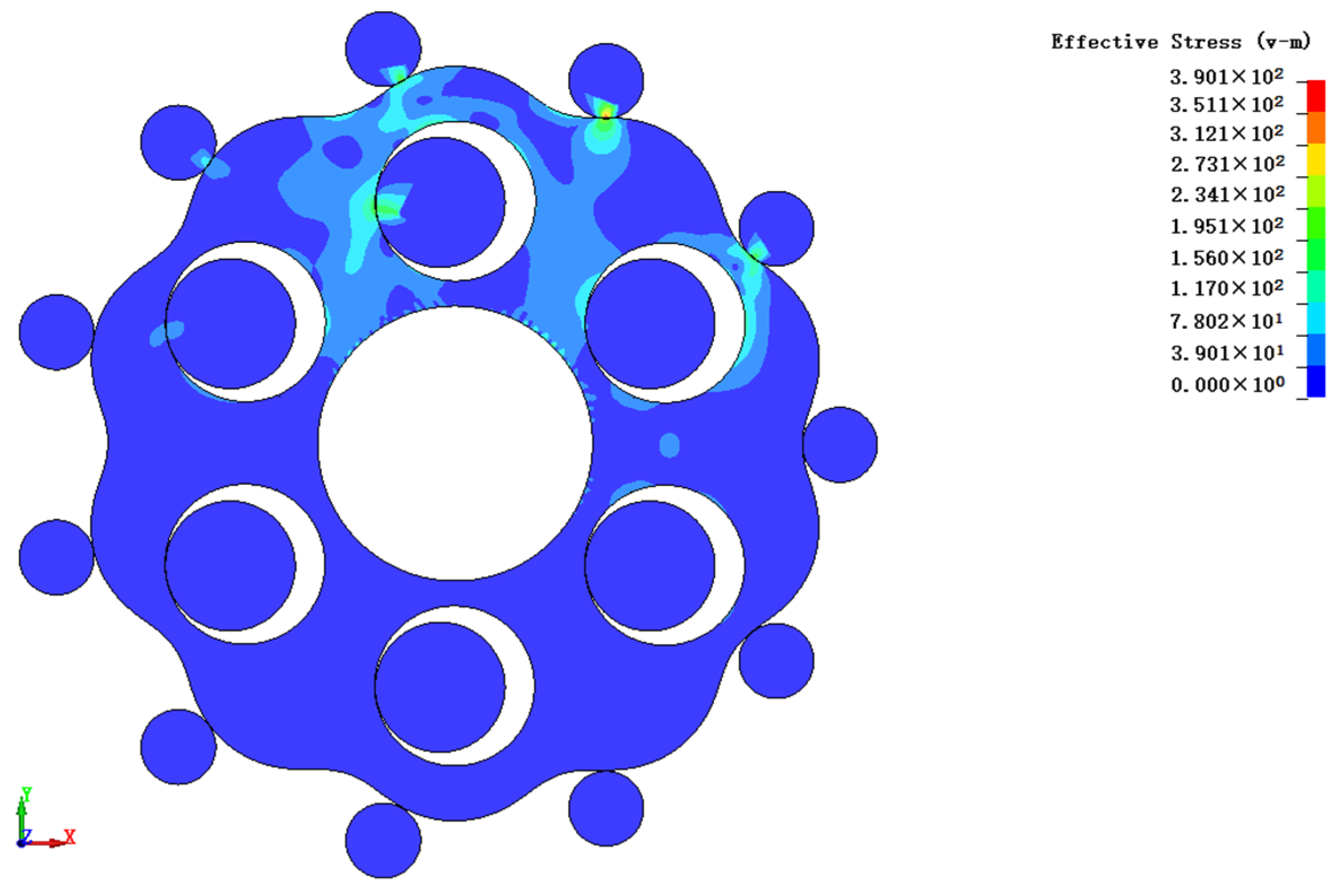
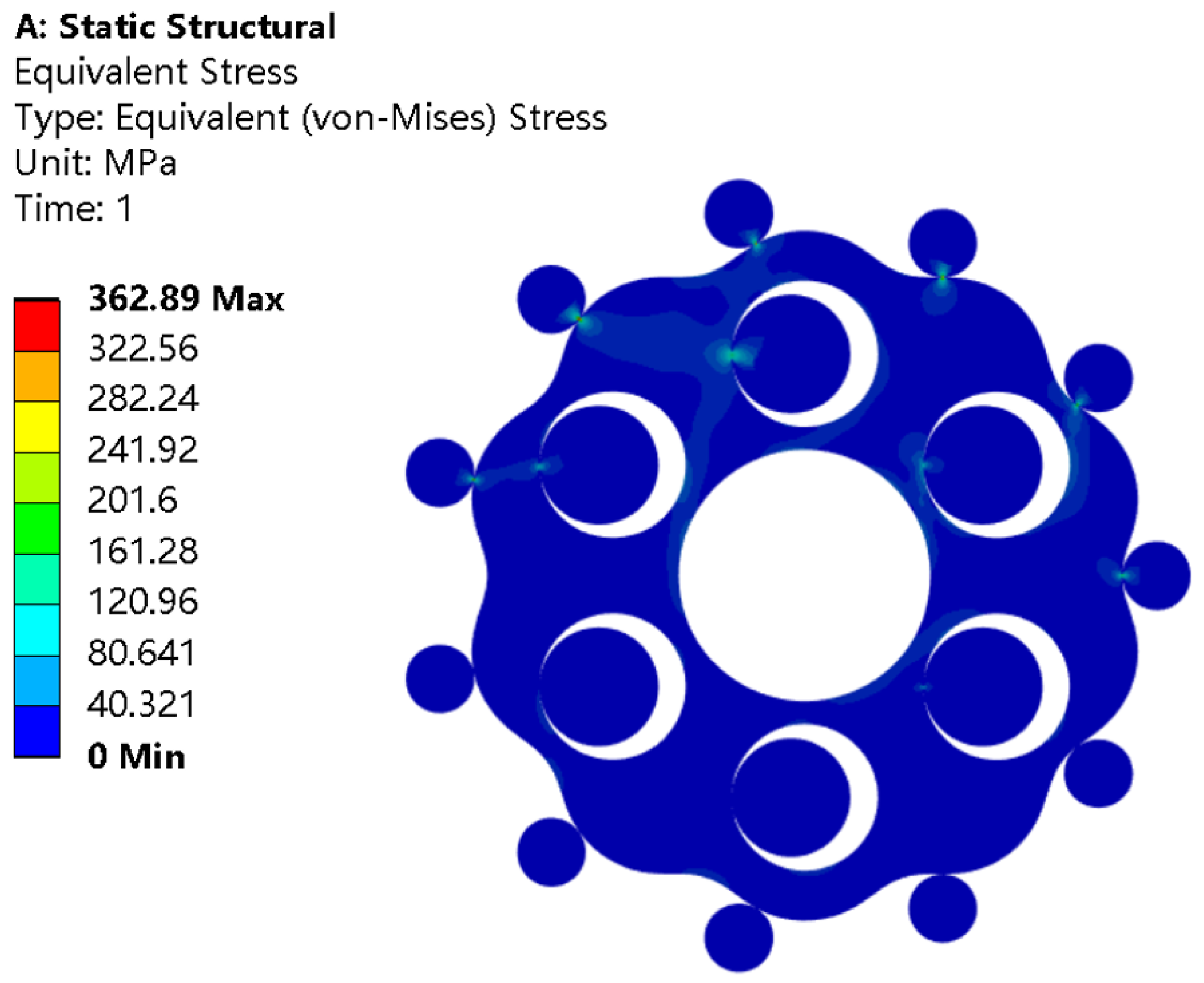
ν = 0.3. Fix the control points of the pin tooth and output pin in the central NURBS slice and constrain all their degrees of freedom. For the cycloid gear, the axial motion is constrained and the circumferential and tangential degrees of freedom are released. The control point around the cycloid gear center hole is coupled as a rigid node to which a clockwise torque of 100 N·mm is applied according to the mechanism transmission ratio calculation formula. For the meshing pair in which the contact element is handled in a face-to-face contact mode, the master-slave contact search algorithm is used, and the contact pair is set with the cycloid gear tooth face as the master contact face and the pin tooth and the output pin face as the slave contact surface. Traverse all NURBS elements with the set constraint conditions and contact settings and assemble the overall stiffness matrix, the solver uses LS-DYNA R13.0 to compute the contact stress nephogram of the cycloid pinwheel mechanism for three different input angles as shown in
Figure 18.
According to the stress nephogram, the maximum stress occurs in tooth No. 3. The maximum stress contact tooth number is consistent with the theoretical contact analysis. From the color change of the contact surface, the stress trend is all from yellow-green to light blue. Observing the NURBS element on the contact pair with stress distribution, it is concluded that the number of contact stresses generated by the pin tooth, output pin and cycloid gear under this input angle is consistent with the theoretical analysis, and the stress area from the equal geometric analysis is consistent with the theoretical cycloid drive stress characteristics, and the IGA model is reasonably constructed, and the maximum contact stress is 390.1 MPA.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}