Piezoresponse, Mechanical, and Electrical Characteristics of Synthetic Spider Silk Nanofibers

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Chemicals Synthesis
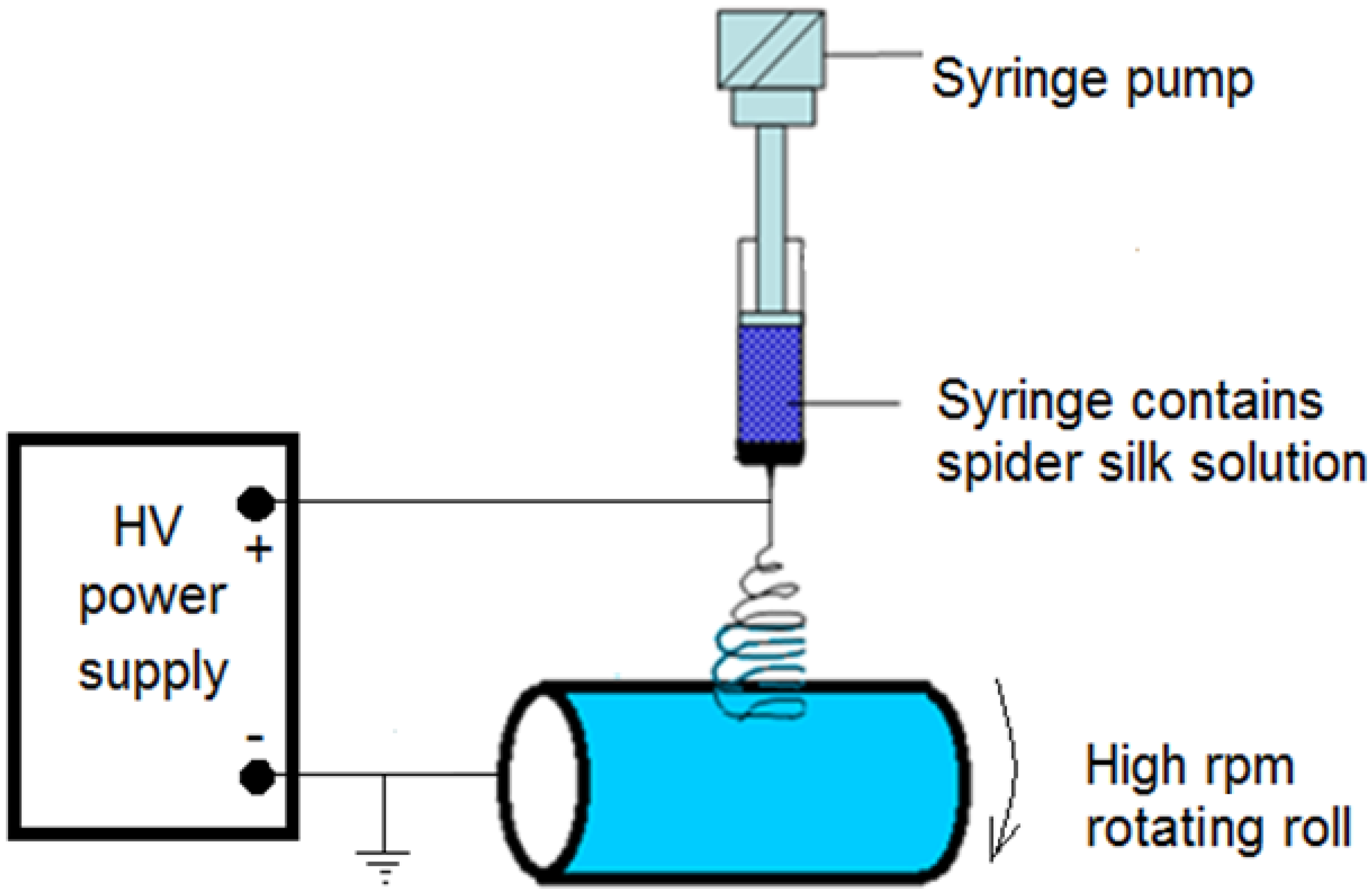
2.2. Electrospinning Process
2.3. Characterization Procedures and Sensing Analysis
3. Results and Discussions
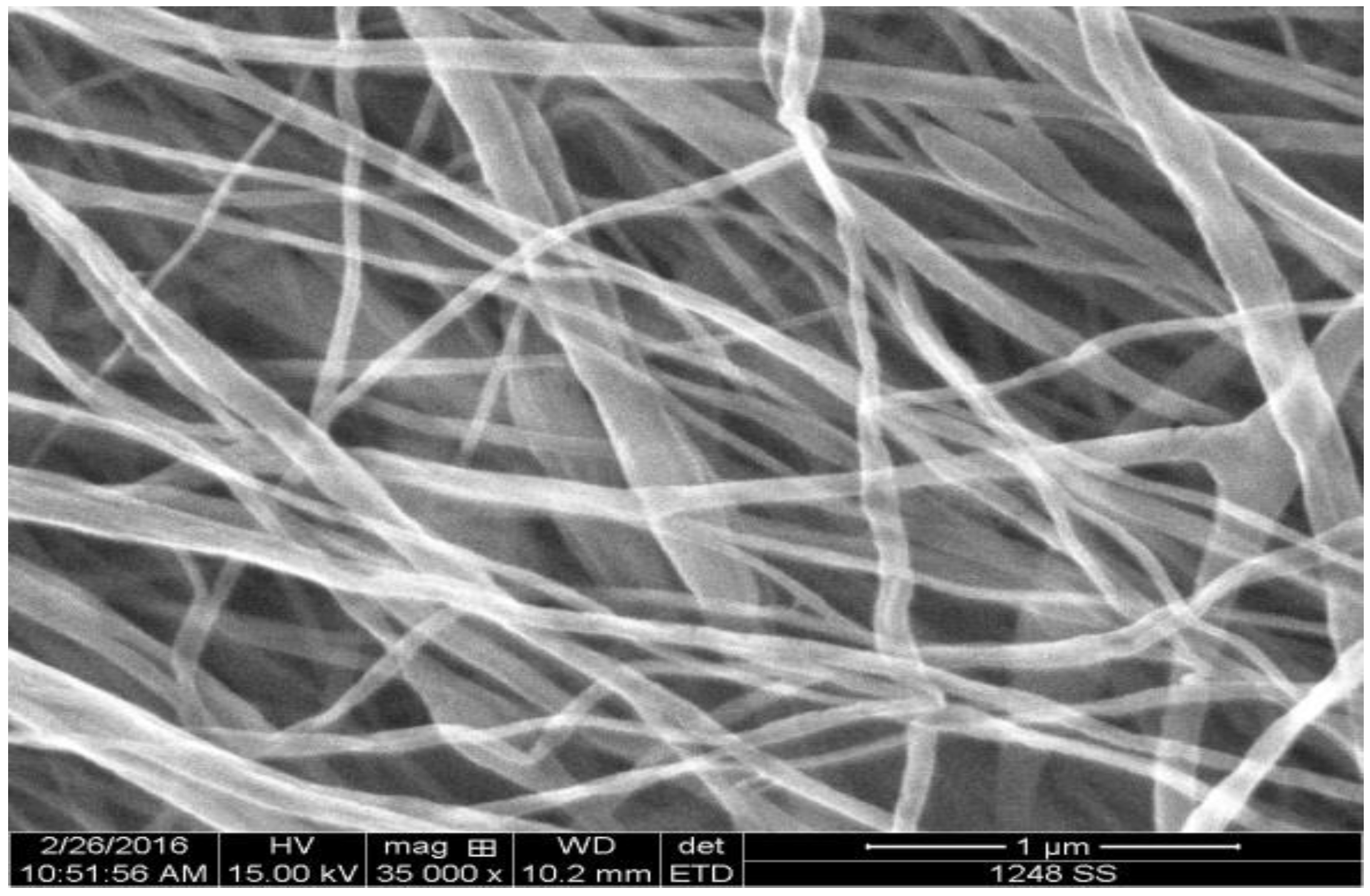
3.1. Characterization of Spider Silk Nanofiber Mats
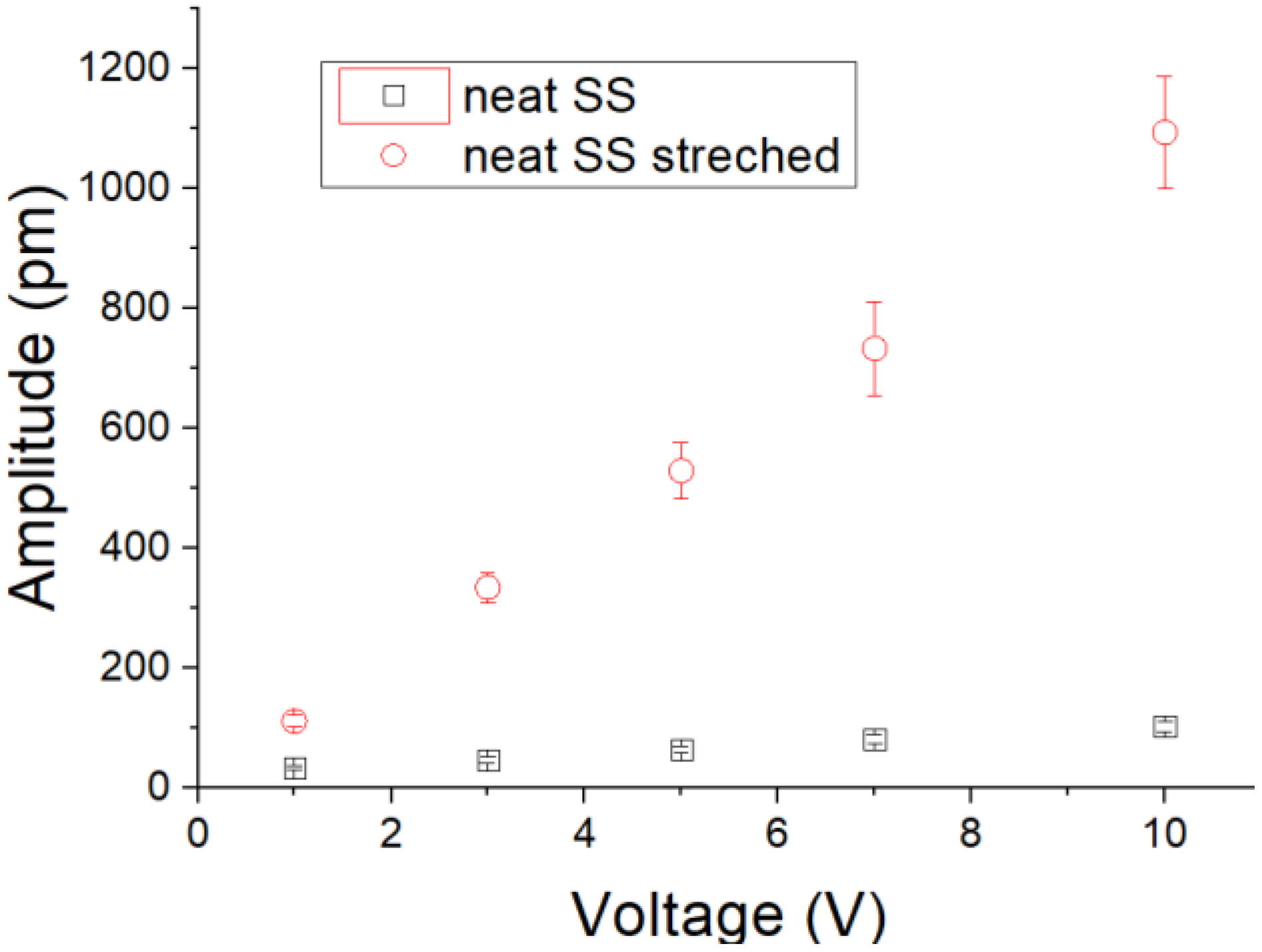
3.2. Mechanical Vibration Sensing
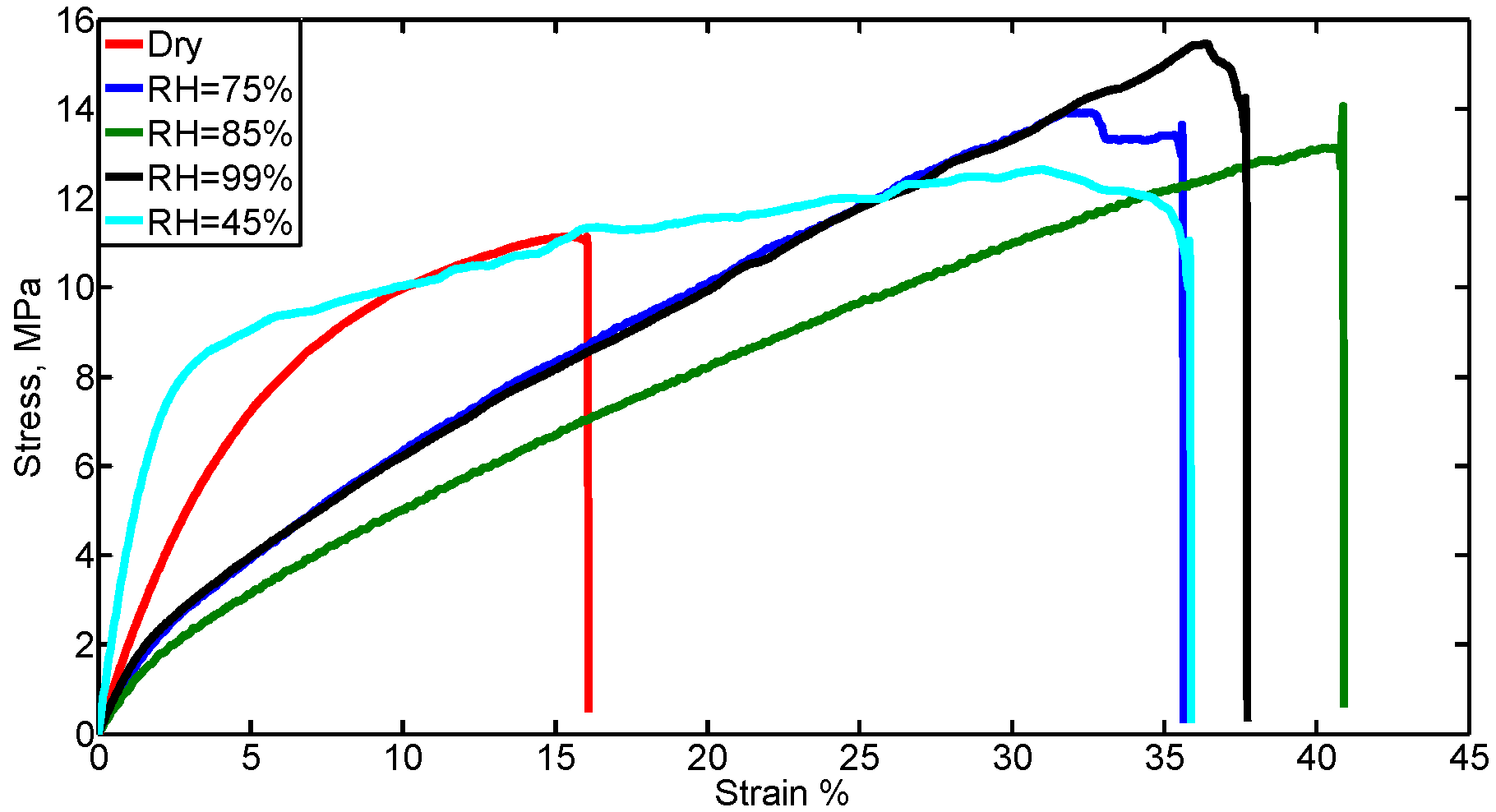
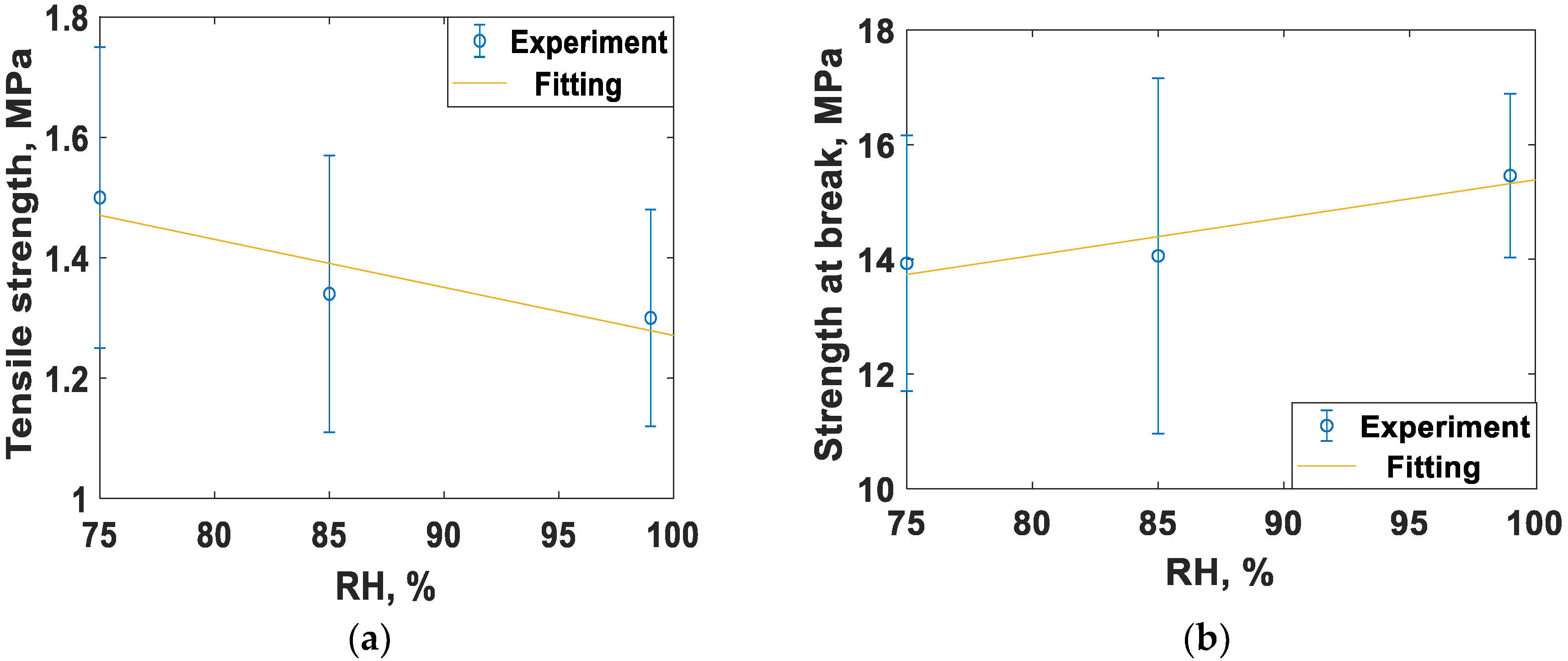
3.3. Humidity Sensing through Mechanical Properties
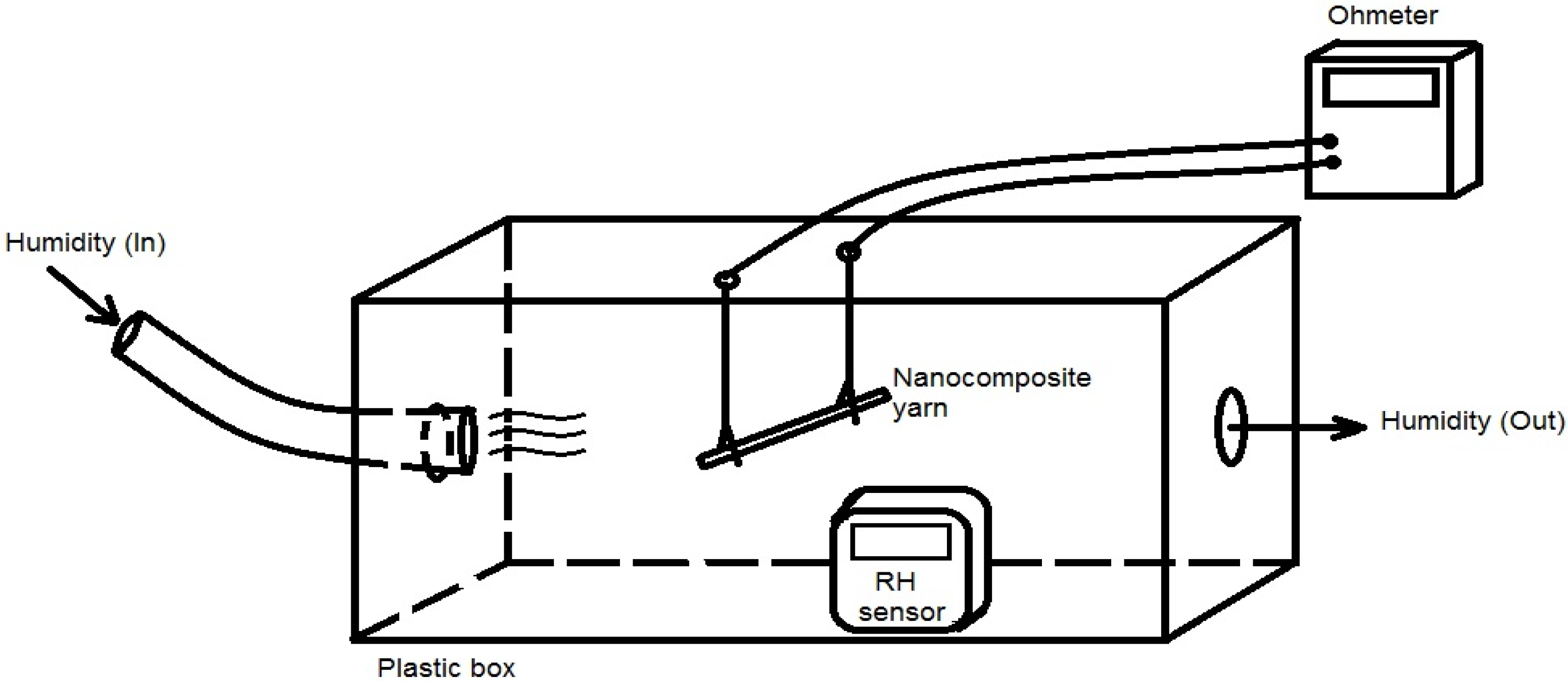
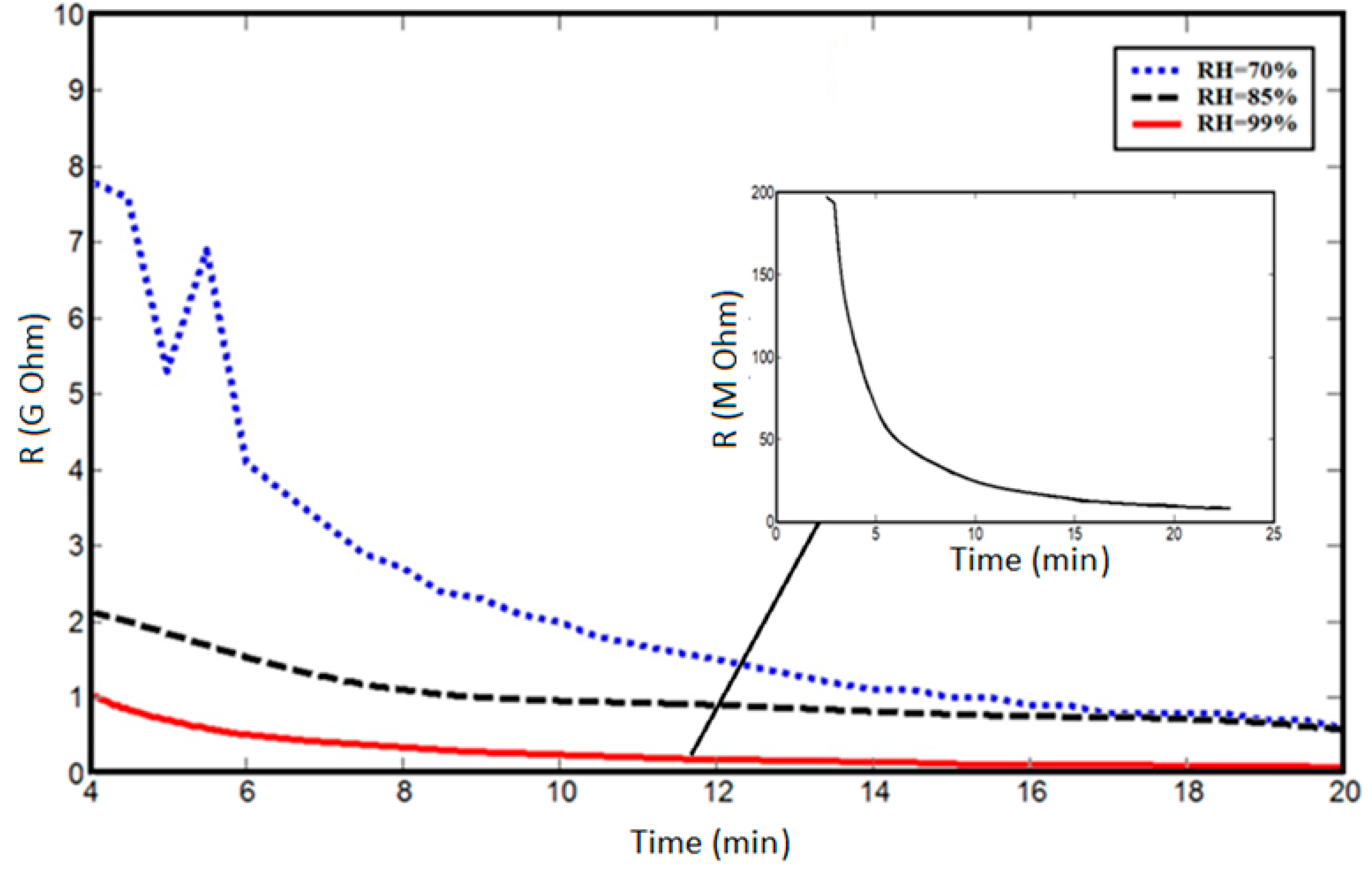
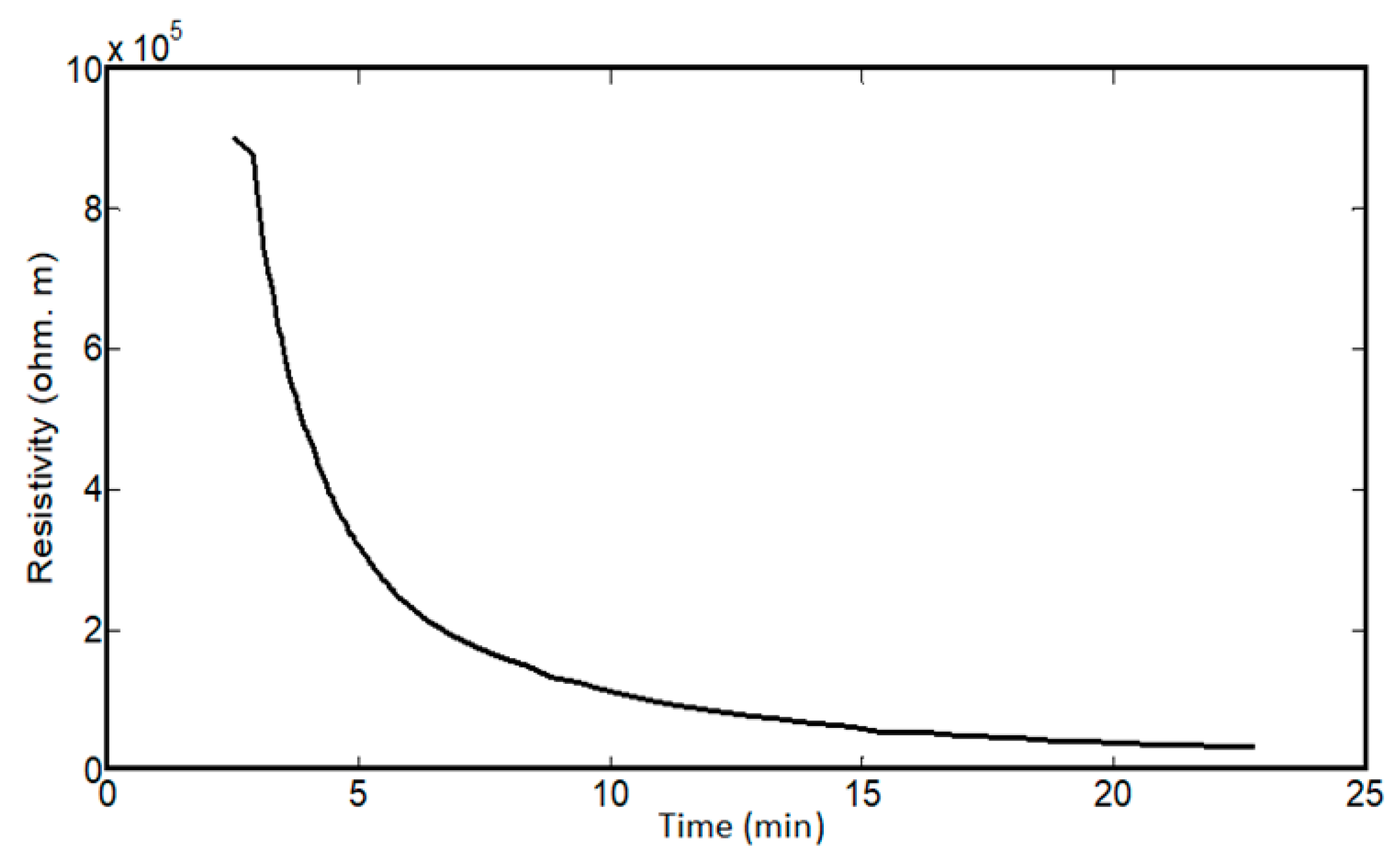
3.4. Resistivity Measurements versus Humidity
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vollrath, F.; Knight, D.P. Liquid crystalline spinning of spider silk. Nature 2001, 410, 541–548. [Google Scholar] [CrossRef] [PubMed]
- Bourzac, K. Spiders: Web of intrigue. Nature 2015, 519, S4–S6. [Google Scholar] [CrossRef] [PubMed]
- Sionkowska, A. Current research on the blends of natural and synthetic polymers as new biomaterials. Rev. Prog. Polym. Sci. 2011, 36, 1254–1276. [Google Scholar] [CrossRef]
- Lucas, F. Spiders and their silk. Discovery 1964, 25, 20–26. [Google Scholar]
- Vollrath, F. Spider webs and silks. Sci. Am. 1992, 266, 70–76. [Google Scholar] [CrossRef]
- Zhou, L.; Fu, P.; Cai, X.; Zhou, S.; Yuan, Y. Naturally derived carbon nanofibers as sustainable electrocatalysts for microbial energy harvesting: A new application of spider silk. Appl. Catal. B Environ. 2016, 188, 31–38. [Google Scholar] [CrossRef]
- Yu, Q.; Xu, S.; Zhang, H.; Gu, L.; Xu, Y.; Ko, F. Structure–property relationship of regenerated spider silk protein nano/microfibrous scaffold fabricated by electrospinning. J. Biomed. Mater. Res. 2014, 102, 3828–3837. [Google Scholar] [CrossRef] [PubMed]
- Steins, A.; Dik, P.; Müller, W.H.; Vervoort, S.J.; Reimers, K.; Kuhbier, J.W.; Vogt, P.M.; van Apeldoorn, A.A.; Coffer, P.J.; Schepers, K. In vitro evaluation of spider silk meshes as a potential biomaterial for bladder reconstruction. PLoS ONE 2015, 10, 0145240. [Google Scholar] [CrossRef] [PubMed]
- Stauffer, S.; Cougill, S.; Lewis, R.V. Mechanical properties of several spider silks. J. Arachnol. 1994, 22, 5–11. [Google Scholar]
- Copeland, C.; Bell, B.; Christensen, C.; Lewis, R. About development of a process for the spinning of synthetic spider silk. ACS Biomater. Sci. Eng. 2015, 1, 577–584. [Google Scholar] [CrossRef] [PubMed]
- Munro, R.; Putzeys, T.; Copeland, C.; Xing, C.; Lewis, R.; Ban, H.; Glorieux, C.; Wubbenhorst, M. Investigation of Synthetic Spider Silk Crystallinity and Alignment via Electrothermal, Pyroelectric, Literature XRD, and Tensile Techniques. Macromol. Mater. Eng. 2017, 302, 1600480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hinman, M.B.; Lewis, R.V. Isolation of a clone encoding a second dragline silk fibroin. J. Biol. Chem. 1992, 267, 19320–19324. [Google Scholar] [PubMed]
- Colgin, M.; Lewis, R.V. Spider Minor Ampullate silk proteins contain new repetitive sequences and highly conserved non-silk-like “Spacer Regions”. Protein Sci. 1998, 7, 667–672. [Google Scholar] [CrossRef] [PubMed]
- Jin, H.J.; Kaplan, D.L. Mechanism of silk processing in insects and spiders. Nature 2003, 424, 1057–1061. [Google Scholar] [CrossRef] [PubMed]
- Keten, S.; Xu, Z.; Ihle, B.; Buehler, M.J. Nanoconfinement controls stiffness, strength and mechanical toughness of beta-sheet crystals in silk. Nat. Mater. 2010, 9, 359–367. [Google Scholar] [CrossRef] [PubMed]
- Porter, D.; Vollrath, F.; Shao, Z. Predicting the mechanical properties of spider silk as a model nanostructured polymer. Eur. Phys. J. E 2005, 16, 199–206. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-Performance Piezoelectric Energy Harvesters and Their Applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef]
- Ando, Y.; Okano, R.; Nishida, K.; Miyata, S.; Fukada, E. Piezoelectric and related properties of hydrated silk fibroin. Rep. Prog. Polym. Phys. Jpn. 1980, 23, 775. [Google Scholar]
- Jucel, T.; Cebe, P.; Caplan, D.L. Structural Origins of silk piezoelectricity. Adv. Func. Mater. 2011, 21, 779–785. [Google Scholar]
- Staworko, M.; Uhl, T. Modeling and Simulation of Piezoelectric Elements-Comparison of Avaialable Methods and Tools Summary. Mechanics 2008, 27, 161–171. [Google Scholar]
- Huang, L.; Bui, N.-N.; Manickam, S.S.; McCutcheon, J.R. Controlling Electrospun Nanofiber Morphology and Mechanical Properties Using Humidity. Polym. Phys. 2011, 49, 1734–1744. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Resistance | 10 kΩ | 30 kΩ | 50 kΩ |
|---|---|---|---|
| d33 | 3.67 | 3.66 | 3.53 |
| Mechanical Properties | Dry | RH = 45% | RH = 75% | RH = 85% | RH = 99% |
|---|---|---|---|---|---|
| Elastic Modulus (MPa) | 1.89 ± 0.30 | 4.32 ± 0.77 | 1.24 ± 0.32 | 0.97 ± 0.16 | 1.45 ± 0.23 |
| Tensile strength (MPa) | 3.57 ± 0.5 | 4.47 ± 0.6 | 1.50 ± 0.25 | 1.34 ± 0.23 | 1.30 ± 0.18 |
| Maximum strain (%) | 16.1 ± 4.2 | 35.88 ± 7.11 | 35.65 ± 3.58 | 40.90 ± 6.92 | 37.74 ± 3.52 |
| Strength at break (MPa) | 11.13 ± 1.88 | 12.64 ± 2.13 | 13.93 ± 2.23 | 14.06 ± 3.1 | 15.46 ± 1.43 |
| Energy of break (kJ/m2) | 24.67 ± 7.97 | 72.52 ± 9.67 | 59.8 ± 9.12 | 61.88 ± 8.31 | 66.11 ± 9.73 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shehata, N.; Kandas, I.; Hassounah, I.; Sobolčiak, P.; Krupa, I.; Mrlik, M.; Popelka, A.; Steadman, J.; Lewis, R. Piezoresponse, Mechanical, and Electrical Characteristics of Synthetic Spider Silk Nanofibers. Nanomaterials 2018, 8, 585. https://doi.org/10.3390/nano8080585
Shehata N, Kandas I, Hassounah I, Sobolčiak P, Krupa I, Mrlik M, Popelka A, Steadman J, Lewis R. Piezoresponse, Mechanical, and Electrical Characteristics of Synthetic Spider Silk Nanofibers. Nanomaterials. 2018; 8(8):585. https://doi.org/10.3390/nano8080585
Chicago/Turabian StyleShehata, Nader, Ishac Kandas, Ibrahim Hassounah, Patrik Sobolčiak, Igor Krupa, Miroslav Mrlik, Anton Popelka, Jesse Steadman, and Randolph Lewis. 2018. "Piezoresponse, Mechanical, and Electrical Characteristics of Synthetic Spider Silk Nanofibers" Nanomaterials 8, no. 8: 585. https://doi.org/10.3390/nano8080585