
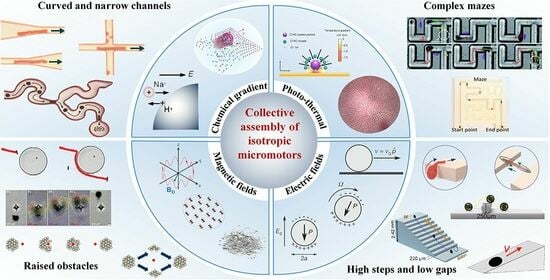
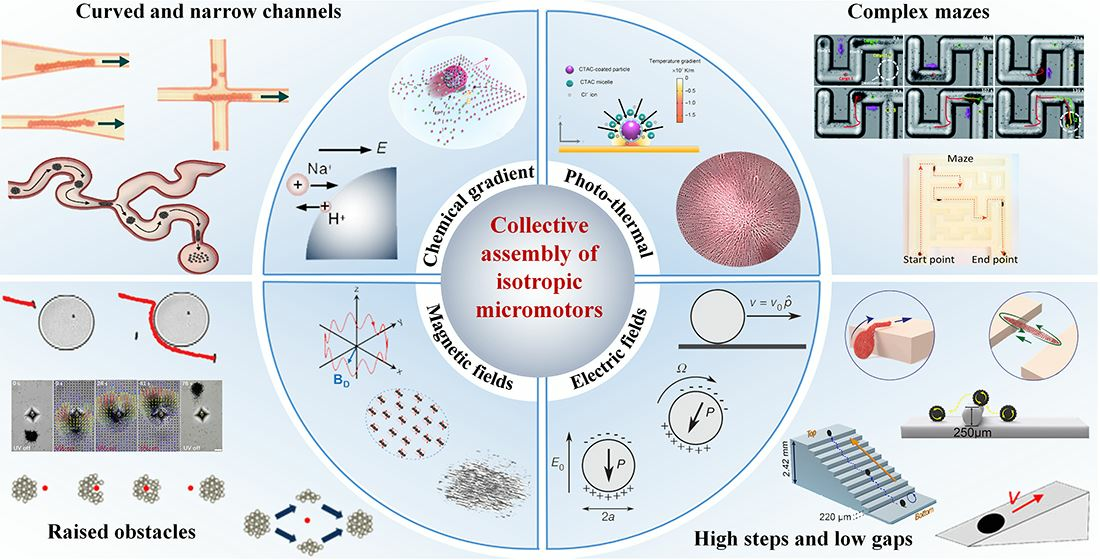
Collective Behaviors of Isotropic Micromotors: From Assembly to Reconstruction and Motion Control under External Fields

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Collective Assembly of Isotropic Micromotors
2.1. Chemical Gradient-Induced Micromotor Swarm
2.1.1. Photocatalytic Micromotor Swarms
2.1.2. Non-Catalytic Micromotor Swarms
2.2. Photo-Thermal Effects-Caused Self-Assembly
2.3. Magnetic Field-Induced Self-Assembly
2.4. Electric Field-Caused Self-Assembly
3. Navigation in Complex Environments
3.1. Curved and Narrow Channels
3.2. Complex Mazes
3.3. Raised Obstacles
3.4. High Steps and Low Gaps
4. Outlook and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Anderson, C.; Theraulaz, G.; Deneubourg, J.L. Self-assemblages in insect societies. Insect. Soc. 2002, 49, 99–110. [Google Scholar] [CrossRef]
- Sumino, Y.; Nagai, K.H.; Shitaka, Y.; Tanaka, D.; Yoshikawa, K.; Chaté, H.; Oiwa, K. Large-scale vortex lattice emerging from collectively moving microtubules. Nature 2012, 483, 448–452. [Google Scholar] [CrossRef] [PubMed]
- Vicsek, T.; Zafeiris, A. Collective motion. Phys. Rep. 2012, 517, 71–140. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Zhang, J.; Luijten, E.; Grzybowski, B.A.; Granick, S. Active colloids with collective mobility status and research opportunities. Chem. Soc. Rev. 2017, 46, 5551–5569. [Google Scholar] [CrossRef]
- Lopez, U.; Gautrais, J.; Couzin, I.D.; Theraulaz, G. From behavioural analyses to models of collective motion in fish schools. Interface Focus 2012, 2, 693–707. [Google Scholar] [CrossRef]
- Reid, C.R.; Lutz, M.J.; Powell, S.; Kao, A.B.; Couzin, I.D.; Garnier, S. Army ants dynamically adjust living bridges in response to a cost-benefit trade-off. Proc. Natl. Acad. Sci. USA 2015, 112, 15113–15118. [Google Scholar] [CrossRef]
- Zhang, H.P.; Be’er, A.; Florin, E.L.; Swinney, H.L. Collective motion and density fluctuations in bacterial colonies. Proc. Natl. Acad. Sci. USA 2010, 107, 13626–13630. [Google Scholar] [CrossRef]
- Law, J.; Yu, J.; Tang, W.; Gong, Z.; Wang, X.; Sun, Y. Micro/Nanorobotic swarms: From fundamentals to functionalities. ACS Nano 2023, 17, 12971–12999. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, J.; Mou, F.; Guan, J. Light-controlled swarming and assembly of colloidal particles. Micromachines 2018, 9, 88. [Google Scholar] [CrossRef]
- Zhang, J.; Laskar, A.; Song, J.; Shklyaev, O.E.; Mou, F.; Guan, J.; Balazs, A.C.; Sen, A. Light-powered, fuel-free oscillation, migration, and reversible manipulation of multiple cargo types by micromotor swarms. ACS Nano 2022, 17, 251–262. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Gao, Y.; Yang, J.; Li, Y.C.; Shao, G.; Zhang, G.; Li, T.; Li, L. Light-ultrasound driven collective “firework” behavior of nanomotors. Adv. Sci. 2018, 5, 1800122. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Soto, F.; Gao, W.; Dong, R.; Garcia-Gradilla, V.; Magaña, E.; Zhang, X.; Wang, J. Reversible swarming and separation of self-propelled chemically powered nanomotors under acoustic fields. J. Am. Chem. Soc. 2015, 137, 2163–2166. [Google Scholar] [CrossRef] [PubMed]
- Kokot, G.; Snezhko, A. Manipulation of emergent vortices in swarms of magnetic rollers. Nat. Commun. 2018, 9, 2344. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Duan, W.; Ahmed, S.; Mallouk, T.E.; Sen, A. Small power: Autonomous nano- and micromotors propelled by self-generated gradients. Nano Today 2013, 8, 531–554. [Google Scholar] [CrossRef]
- Moo, J.G.; Pumera, M. Chemical energy powered nano/micro/macromotors and the environment. Chem.—Eur. J. 2015, 21, 58–72. [Google Scholar] [CrossRef]
- Villa, K.; Novotny, F.; Zelenka, J.; Browne, M.P.; Ruml, T.; Pumera, M. Visible-light-driven single-component BiVO4 micromotors with the autonomous ability for capturing microorganisms. ACS Nano 2019, 13, 8135–8145. [Google Scholar] [CrossRef]
- Xiao, Z.; Duan, S.; Xu, P.; Cui, J.; Zhang, H.; Wang, W. Synergistic speed enhancement of an electric-photochemical hybrid micromotor by tilt rectification. ACS Nano 2020, 14, 8658–8667. [Google Scholar] [CrossRef]
- Chen, C.; Mou, F.; Xu, L.; Wang, S.; Guan, J.; Feng, Z.; Wang, Q.; Kong, L.; Li, W.; Wang, J.; et al. Light-steered isotropic semiconductor micromotors. Adv. Mater. 2017, 29, 1603374. [Google Scholar] [CrossRef]
- Dai, J.; Cheng, X.; Li, X.; Wang, Z.; Wang, Y.; Zheng, J.; Liu, J.; Chen, J.; Wu, C.; Tang, J. Solution-synthesized multifunctional Janus nanotree microswimmer. Adv. Funct. Mater. 2021, 31, 2106204. [Google Scholar] [CrossRef]
- Pourrahimi, A.M.; Villa, K.; Manzanares Palenzuela, C.L.; Ying, Y.; Sofer, Z.; Pumera, M. Catalytic and light-driven ZnO/Pt Janus nano/micromotors: Switching of motion mechanism via interface roughness and defect tailoring at the nanoscale. Adv. Funct. Mater. 2019, 29, 1808678. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, Z.; Hu, S.; Huang, N.; Lee, H.; Liu, Y.; Yang, J.; Huan, X.; Xu, Z.; Cao, S.; et al. 3D Printing of arbitrary perovskite nanowire heterostructures. Adv. Funct. Mater. 2023, 29, 1808678. [Google Scholar] [CrossRef]
- Feng, K.; Gong, J.; Qu, J.; Niu, R. Dual-mode-driven micromotor based on foam-like carbon nitride and Fe3O4 with improved manipulation and photocatalytic performance. ACS Appl. Mater. Interfaces 2022, 14, 44271–44281. [Google Scholar] [CrossRef] [PubMed]
- Feng, K.; Zhang, L.; Gong, J.; Qu, J.; Niu, R. Visible light triggered exfoliation of COF micro/nanomotors for efficient photocatalysis. Green Energy Environ. 2021, 8, 567–578. [Google Scholar] [CrossRef]
- Feuerstein, L.; Biermann, C.G.; Xiao, Z.; Holm, C.; Simmchen, J. Highly efficient active colloids driven by galvanic exchange reactions. J. Am. Chem. Soc. 2021, 143, 17015–17022. [Google Scholar] [CrossRef]
- Xie, L.; Yan, M.; Liu, T.; Gong, K.; Luo, X.; Qiu, B.; Zeng, J.; Liang, Q.; Zhou, S.; He, Y.; et al. Kinetics-controlled super-assembly of asymmetric porous and hollow carbon nanoparticles as light-sensitive smart nanovehicles. J. Am. Chem. Soc. 2022, 144, 1634–1646. [Google Scholar] [CrossRef]
- Zhou, C.; Zhang, H.P.; Tang, J.; Wang, W. Photochemically powered AgCl Janus micromotors as a model system to understand ionic self-diffusiophoresis. Langmuir 2018, 34, 3289–3295. [Google Scholar] [CrossRef]
- Urso, M.; Ussia, M.; Novotny, F.; Pumera, M. Trapping and detecting nanoplastics by MXene-derived oxide microrobots. Nat. Commun. 2022, 13, 3573. [Google Scholar] [CrossRef]
- Mou, F.; Li, X.; Xie, Q.; Zhang, J.; Xiong, K.; Xu, L.; Guan, J. Active micromotor systems built from passive particles with biomimetic predator–prey interactions. ACS Nano 2019, 14, 406–414. [Google Scholar] [CrossRef]
- Villa, K.; Děkanovský, L.; Plutnar, J.; Kosina, J.; Pumera, M. Swarming of perovskite-like Bi2WO6 microrobots destroy textile fibers under visible light. Adv. Funct. Mater. 2020, 30, 2007073. [Google Scholar] [CrossRef]
- Niu, R.; Palberg, T.; Speck, T. Self-assembly of colloidal molecules due to self-generated flow. Phys. Rev. Lett. 2017, 119, 028001. [Google Scholar] [CrossRef]
- Mou, F.; Zhang, J.; Wu, Z.; Du, S.; Zhang, Z.; Xu, L.; Guan, J. Phototactic flocking of photochemical micromotors. iScience 2019, 19, 415–424. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Liu, Y.; Zhang, D.; Zhang, H.; Jiang, J.; Duan, R.; Xiao, J.; Xing, J.; Zhang, D.; Dong, B. Calligraphy/painting based on a bioinspired light-driven micromotor with concentration-dependent motion direction reversal and dynamic swarming behavior. ACS Appl. Mater. Interfaces 2019, 11, 40533–40542. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Yuan, K.; Du, X.; Wang, Q.; Wang, S.; Zhang, L. Domino reaction encoded heterogeneous colloidal microswarm with on-demand morphological adaptability. Adv. Mater. 2021, 33, 2100070. [Google Scholar] [CrossRef] [PubMed]
- Bricard, A.; Caussin, J.-B.; Desreumaux, N.; Dauchot, O.; Bartolo, D. Emergence of macroscopic directed motion in populations of motile colloids. Nature 2013, 503, 95–98. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Xue, X.; Wang, J.; Liu, H. Phototropic aggregation and light-guided long-distance collective transport of colloidal particles. Langmuir 2020, 36, 6819–6827. [Google Scholar] [CrossRef]
- Soni, V.; Bililign, E.S.; Magkiriadou, S.; Sacanna, S.; Bartolo, D.; Shelley, M.J.; Irvine, W.T.M. The odd free surface flows of a colloidal chiral fluid. Nat. Phys. 2019, 15, 1188–1194. [Google Scholar] [CrossRef]
- Hermanová, S.; Pumera, M. Micromachines for microplastics treatment. ACS Nanosci. 2022, 2, 225–232. [Google Scholar] [CrossRef]
- Zhu, H.; Xu, B.R.; Wang, Y.; Pan, X.X.; Qu, Z.H.; Mei, Y.F. Self-powered locomotion of a hydrogel water strider. Sci. Robot. 2021, 6, eabe7925. [Google Scholar] [CrossRef]
- Feng, K.; Ureña Marcos, J.C.; Mukhopadhyay, A.K.; Niu, R.; Zhao, Q.; Qu, J.; Liebchen, B. Self-solidifying active droplets showing memory-induced chirality. Adv. Sci. 2023, 10, 2300866. [Google Scholar] [CrossRef]
- Kruger, C.; Klos, G.; Bahr, C.; Maass, C.C. Curling liquid crystal microswimmers: A cascade of spontaneous symmetry breaking. Phys. Rev. Lett. 2016, 117, 048003. [Google Scholar] [CrossRef] [PubMed]
- Suda, S.; Suda, T.; Ohmura, T.; Ichikawa, M. Straight-to-curvilinear motion transition of a swimming droplet caused by the susceptibility to fluctuations. Phys. Rev. Lett. 2021, 127, 088005. [Google Scholar] [CrossRef] [PubMed]
- Hokmabad, B.V.; Dey, R.; Jalaal, M.; Mohanty, D.; Almukambetova, M.; Baldwin, K.A.; Lohse, D.; Maass, C.C. Emergence of bimodal motility in active droplets. Phys. Rev. X 2021, 11, 011043. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, L. External power-driven microrobotic swarm: From fundamental understanding to imaging-guided delivery. ACS Nano 2021, 15, 149–174. [Google Scholar] [CrossRef]
- Xie, H.; Sun, M.; Fan, X.; Lin, Z.; Chen, W.; Wang, L.; Dong, L.; He, Q. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Sci. Robot. 2019, 4, eaav8006. [Google Scholar] [CrossRef]
- Hokmabad, B.V.; Nishide, A.; Ramesh, P.; Kruger, C.; Maass, C.C. Spontaneously rotating clusters of active droplets. Soft Mater. 2022, 18, 2731–2741. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, H.; Xu, T.; Yu, J. An overview of micronanoswarms for biomedical applications. ACS Nano 2021, 15, 15625–15644. [Google Scholar] [CrossRef]
- Chen, X.; Xu, Y.; Lou, K.; Peng, Y.; Zhou, C.; Zhang, H.P.; Wang, W. Programmable, spatiotemporal control of colloidal motion waves via structured light. ACS Nano 2022, 16, 12755–12766. [Google Scholar] [CrossRef]
- Deng, Q.; Zhang, L.; Lv, W.; Liu, X.; Ren, J.; Qu, X. Biological mediator-propelled nanosweeper for nonpharmaceutical thrombus therapy. ACS Nano 2021, 15, 6604–6613. [Google Scholar] [CrossRef]
- Liu, X.; Chen, W.; Zhao, D.; Liu, X.; Wang, Y.; Chen, Y.; Ma, X. Enzyme-powered hollow nanorobots for active microsampling enabled by thermoresponsive polymer gating. ACS Nano 2022, 16, 10354–10363. [Google Scholar] [CrossRef]
- Shao, J.; Abdelghani, M.; Shen, G.; Cao, S.; Williams, D.S.; van Hest, J.C.M. Erythrocyte membrane modified janus polymeric motors for thrombus therapy. ACS Nano 2018, 12, 4877–4885. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Hu, J.; Pan, X.; Sanchez, S.; Yan, X.; Ma, X. Enzyme-powered liquid metal nanobots endowed with multiple biomedical functions. ACS Nano 2021, 15, 11543–11554. [Google Scholar] [CrossRef]
- Niu, R.; Fischer, A.; Palberg, T.; Speck, T. Dynamics of binary active clusters driven by ion-exchange particles. ACS Nano 2018, 12, 10932–10938. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Mou, F.; Huang, Z.; Zhang, J.; You, M.; Xu, L.; Luo, M.; Guan, J. Hierarchical microswarms with leader-follower-like structures: Electrohydrodynamic self-organization and multimode collective photoresponses. Adv. Funct. Mater. 2020, 30, 1908602. [Google Scholar] [CrossRef]
- Wang, W.; Duan, W.; Ahmed, S.; Sen, A.; Mallouk, T.E. From one to many: Dynamic assembly and collective behavior of self-propelled colloidal motors. Acc. Chem. Res. 2015, 48, 1938–1946. [Google Scholar] [CrossRef]
- Ibele, M.; Mallouk, T.E.; Sen, A. Schooling behavior of light-powered autonomous micromotors in water. Angew. Chem. Int. Ed. 2009, 48, 3308–3312. [Google Scholar] [CrossRef]
- Altemose, A.; Harris, A.J.; Sen, A. Autonomous formation and annealing of colloidal crystals induced by light-powered oscillations of active particles. ChemSystemsChem 2019, 2, e1900061. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, J.; Jin, Y.; Wen, Y.; Mu, Y.; Wu, C.; Wang, Y.; Tong, P.; Li, Z.; Hou, X.; et al. Photochromism from wavelength-selective colloidal phase segregation. Nature 2023, 617, 499–506. [Google Scholar] [CrossRef]
- Chen, M.; Lin, Z.; Xuan, M.; Lin, X.; Yang, M.; Dai, L.; He, Q. Programmable dynamic shapes with a swarm of light-powered colloidal motors. Angew. Chem. Int. Ed. 2021, 60, 16674–16679. [Google Scholar] [CrossRef]
- Zhou, D.; Gao, Y.; Liu, H.; Zhang, G.; Li, L. Light-induced patterned self-assembly behavior of isotropic semiconductor nanomotors. Chem. Asian J. 2019, 14, 2445–2449. [Google Scholar] [CrossRef]
- Kim, Y.; Shah, A.A.; Solomon, M.J. Spatially and temporally reconfigurable assembly of colloidal crystals. Nat. Commun. 2014, 5, 3676. [Google Scholar] [CrossRef] [PubMed]
- Michelin, S.; Lauga, E. Autophoretic locomotion from geometric asymmetry. Eur. Phys. J. E 2015, 38, 7. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Dai, J.; Li, X.; Gao, L.; Wang, J.; Liu, J.; Zheng, J.; Zhan, X.; Chen, J.; Cheng, X.; et al. Ion-exchange enabled synthetic swarm. Nat. Nanotechnol. 2021, 16, 288–295. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Wu, C.; Xiong, Z.; Liang, C.; Li, Z.; Liu, B.; Cao, Q.; Wang, J.; Tang, J.; Li, D. Self-driven magnetorobots for recyclable and scalable micro/nanoplastic removal from nonmarine waters. Sci. Adv. 2022, 8, eade1731. [Google Scholar] [CrossRef]
- Chen, Z.; Li, J.; Zheng, Y. Heat-mediated optical manipulation. Chem. Rev. 2022, 122, 3122–3179. [Google Scholar] [CrossRef]
- Wu, Y.; Si, T.; Shao, J.; Wu, Z.; He, Q. Near-infrared light-driven Janus capsule motors: Fabrication, propulsion, and simulation. Nano Res. 2016, 9, 3747–3756. [Google Scholar] [CrossRef]
- Lin, L.; Zhang, J.; Peng, X.; Wu, Z.; Coughlan, A.C.H.; Mao, Z.; Bevan, M.A.; Zheng, Y. Opto-thermophoretic assembly of colloidal matter. Sci. Adv. 2017, 3, e1700458. [Google Scholar] [CrossRef]
- Yue, H.; Chang, X.; Liu, J.; Zhou, D.; Li, L. Wheel-like magnetic-driven microswarm with a band-aid imitation for patching up microscale intestinal perforation. ACS Appl. Mater. Interfaces 2022, 14, 8743–8752. [Google Scholar] [CrossRef]
- Law, J.; Chen, H.; Wang, Y.; Yu, J.; Sun, Y. Gravity-resisting colloidal collectives. Sci. Adv. 2022, 8, eade3161. [Google Scholar] [CrossRef]
- Chen, H.; Wang, Y.; Liu, Y.; Zou, Q.; Yu, J. Sensing of fluidic features using colloidal microswarms. ACS Nano 2022, 16, 16281–16291. [Google Scholar] [CrossRef]
- Wang, L.; Gao, H.; Sun, H.; Ji, Y.; Song, L.; Jia, L.; Wang, C.; Li, C.; Zhang, D.; Xu, Y.; et al. Reconfigurable vortex-like paramagnetic nanoparticle swarm with upstream motility and high body-length ratio velocity. Research 2023, 6, 0088. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Yang, L.; Du, X.; Chen, H.; Xu, T.; Zhang, L. Adaptive pattern and motion control of magnetic microrobotic swarms. IEEE Trans. Robot. 2022, 38, 1552–1570. [Google Scholar] [CrossRef]
- Xie, H.; Fan, X.; Sun, M.; Lin, Z.; He, Q.; Sun, L. Programmable generation and motion control of a snakelike magnetic microrobot swarm. IEEE ASME Trans. Mechatron. 2019, 24, 902–912. [Google Scholar] [CrossRef]
- Zheng, L.; Ji, H.; Sun, D. Automated manipulation of microswarms without real-time image feedback using magnetic tweezers. IEEE ASME Trans. Mechatron. 2022, 27, 5712–5723. [Google Scholar] [CrossRef]
- Yang, X.; Tan, R.; Lu, H.; Fukuda, T.; Shen, Y. Milli-scale cellular robots that can reconfigure morphologies and behaviors simultaneously. Nat. Commun. 2022, 13, 4156. [Google Scholar] [CrossRef] [PubMed]
- Sun, M.; Chan, K.F.; Zhang, Z.; Wang, L.; Wang, Q.; Yang, S.; Chan, S.M.; Chiu, P.W.Y.; Sung, J.J.Y.; Zhang, L. Magnetic microswarm and fluoroscopy-guided platform for biofilm eradication in biliary stents. Adv. Mater. 2022, 34, 2201888. [Google Scholar] [CrossRef]
- Sun, M.; Fan, X.; Tian, C.; Yang, M.; Sun, L.; Xie, H. Swarming microdroplets to a dexterous micromanipulator. Adv. Funct. Mater. 2021, 31, 2011193. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, Q. Collective behaviors of magnetic microparticle swarms: From dexterous tentacles to reconfigurable carpets. ACS Nano 2022, 16, 13728–13739. [Google Scholar] [CrossRef]
- Zhang, J.; Mou, F.; Wu, Z.; Song, J.; Kauffman, J.E.; Sen, A.; Guan, J. Cooperative transport by flocking phototactic micromotors. Nanoscale Adv. 2021, 3, 6157–6163. [Google Scholar] [CrossRef]
- Jin, C.; Krüger, C.; Maass, C.C. Chemotaxis and autochemotaxis of self-propelling droplet swimmers. Proc. Natl. Acad. Sci. USA 2017, 114, 5089–5094. [Google Scholar] [CrossRef]
- Yigit, B.; Alapan, Y.; Sitti, M. Programmable collective behavior in dynamically self-assembled mobile microrobotic swarms. Adv. Sci. 2019, 6, 1801837. [Google Scholar] [CrossRef] [PubMed]
- Martinez-Pedrero, F.; Tierno, P. Magnetic propulsion of self-assembled colloidal carpets: Efficient cargo transport via a conveyor-belt effect. Phys. Rev. Appl. 2015, 3, 051003. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Zhang, L. Micromanipulation using reconfigurable self-assembled magnetic droplets with needle guidance. IEEE Trans. Autom. Sci. Eng. 2022, 19, 759–771. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, H.; Zou, Q.; Du, X.; Wang, Y.; Yu, J. Automatic navigation of microswarms for dynamic obstacle avoidance. IEEE Trans. Robot. 2023, 39, 2770–2785. [Google Scholar] [CrossRef]
- Sun, M.; Yang, S.; Jiang, J.; Zhang, L. Horizontal and vertical coalescent microrobotic collectives using ferrofluid droplets. Adv. Mater. 2023, 35, 2300521. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Wang, H.; Yang, H.; Song, W.; Dai, L.; Yu, S.; Liu, X.; Li, T. Magnetic microswarm for MRI contrast enhancer. Chem. Asian J. 2022, 17, e202200561. [Google Scholar] [CrossRef]
- Wang, L.; Song, L.; Sun, H.; Ji, Y.; Dai, Y.; Feng, L. Multi-mode motion control of reconfigurable vortex-shaped microrobot swarms for targeted tumor therapy. IEEE Robot. Autom. Lett. 2022, 7, 3578–3583. [Google Scholar] [CrossRef]
- Li, M.; Zhang, T.; Zhang, X.; Mu, J.; Zhang, W. Vector-controlled wheel-like magnetic swarms with multimodal locomotion and reconfigurable capabilities. Front. Bioeng. Biotechnol. 2022, 10, 877964. [Google Scholar] [CrossRef]
- Zhao, Y.; Xiong, H.; Li, Y.; Gao, W.; Hua, C.; Wu, J.; Fan, C.; Cai, X.; Zheng, Y. Magnetically actuated reactive oxygen species scavenging nano-robots for targeted treatment. Adv. Intell. Syst. 2022, 4, 2200061. [Google Scholar] [CrossRef]
- Cichos, F.; Gustavsson, K.; Mehlig, B.; Volpe, G. Machine learning for active matter. Nat. Mach. Intell. 2020, 2, 94–103. [Google Scholar] [CrossRef]
- Tsang, A.C.; Demir, E.; Ding, Y.; Pak, O.S. Roads to smart artificial microswimmers. Adv. Intell. Syst. 2020, 2, 1900137. [Google Scholar] [CrossRef]
- Nasiri, M.; Lowen, H.; Liebchen, B. Optimal active particle navigation meets machine learning. Europhys. Lett. 2023, 142, 17001. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, K.; Chen, L.; Zhang, X.; Gong, J.; Qu, J.; Niu, R. Collective Behaviors of Isotropic Micromotors: From Assembly to Reconstruction and Motion Control under External Fields. Nanomaterials 2023, 13, 2900. https://doi.org/10.3390/nano13212900
Feng K, Chen L, Zhang X, Gong J, Qu J, Niu R. Collective Behaviors of Isotropic Micromotors: From Assembly to Reconstruction and Motion Control under External Fields. Nanomaterials. 2023; 13(21):2900. https://doi.org/10.3390/nano13212900
Chicago/Turabian StyleFeng, Kai, Ling Chen, Xinle Zhang, Jiang Gong, Jinping Qu, and Ran Niu. 2023. "Collective Behaviors of Isotropic Micromotors: From Assembly to Reconstruction and Motion Control under External Fields" Nanomaterials 13, no. 21: 2900. https://doi.org/10.3390/nano13212900