
Numerical and Experimental Study of Colored Magnetic Particle Mapping via Magnetoelectric Sensors

Abstract
:1. Introduction
2. Material and Methods
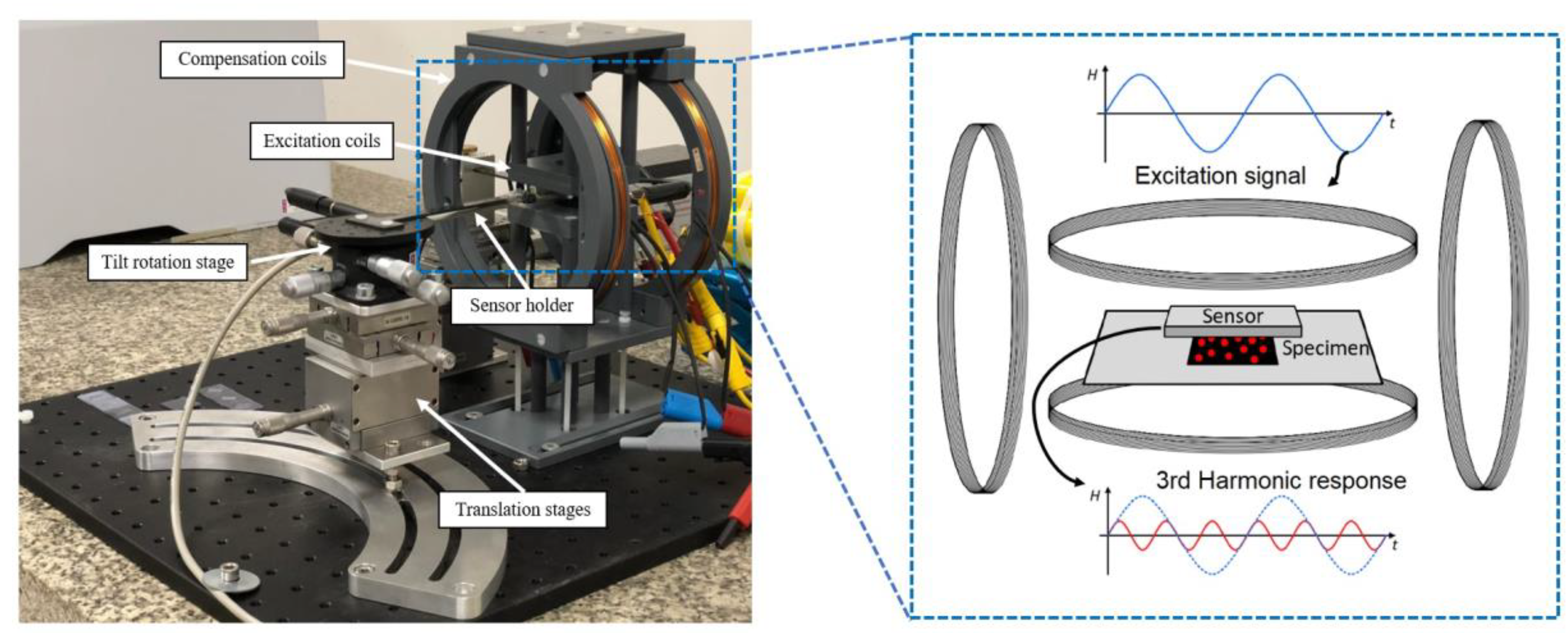
2.1. Experimental Setup
2.2. Sample Preparation
2.3. Image Reconstruction
| Algorithm 1. Adopted PGD method for colored MPM application. |
|
2.4. Simulation Procedure
2.5. Measurement Scheme
3. Result and Discussion
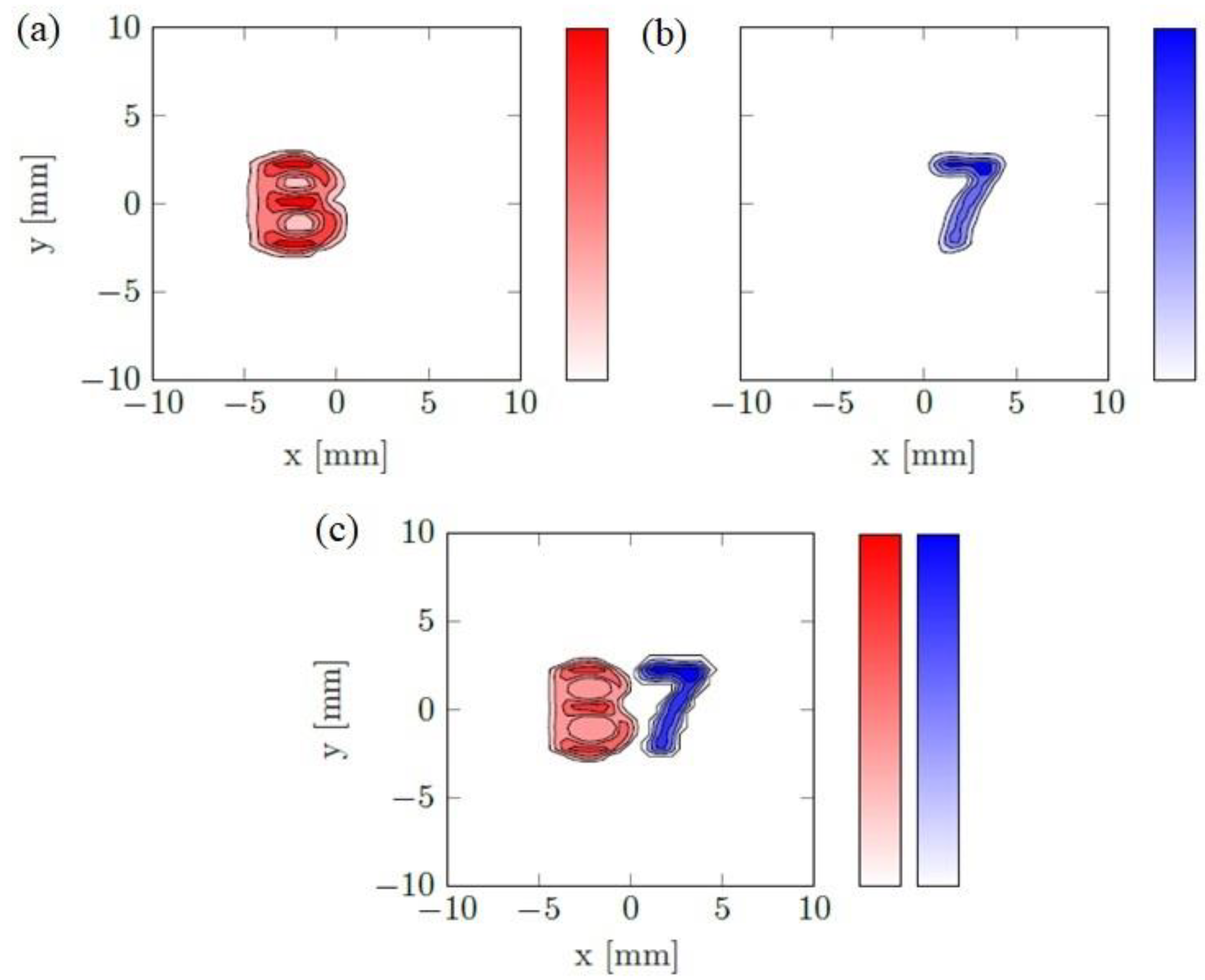
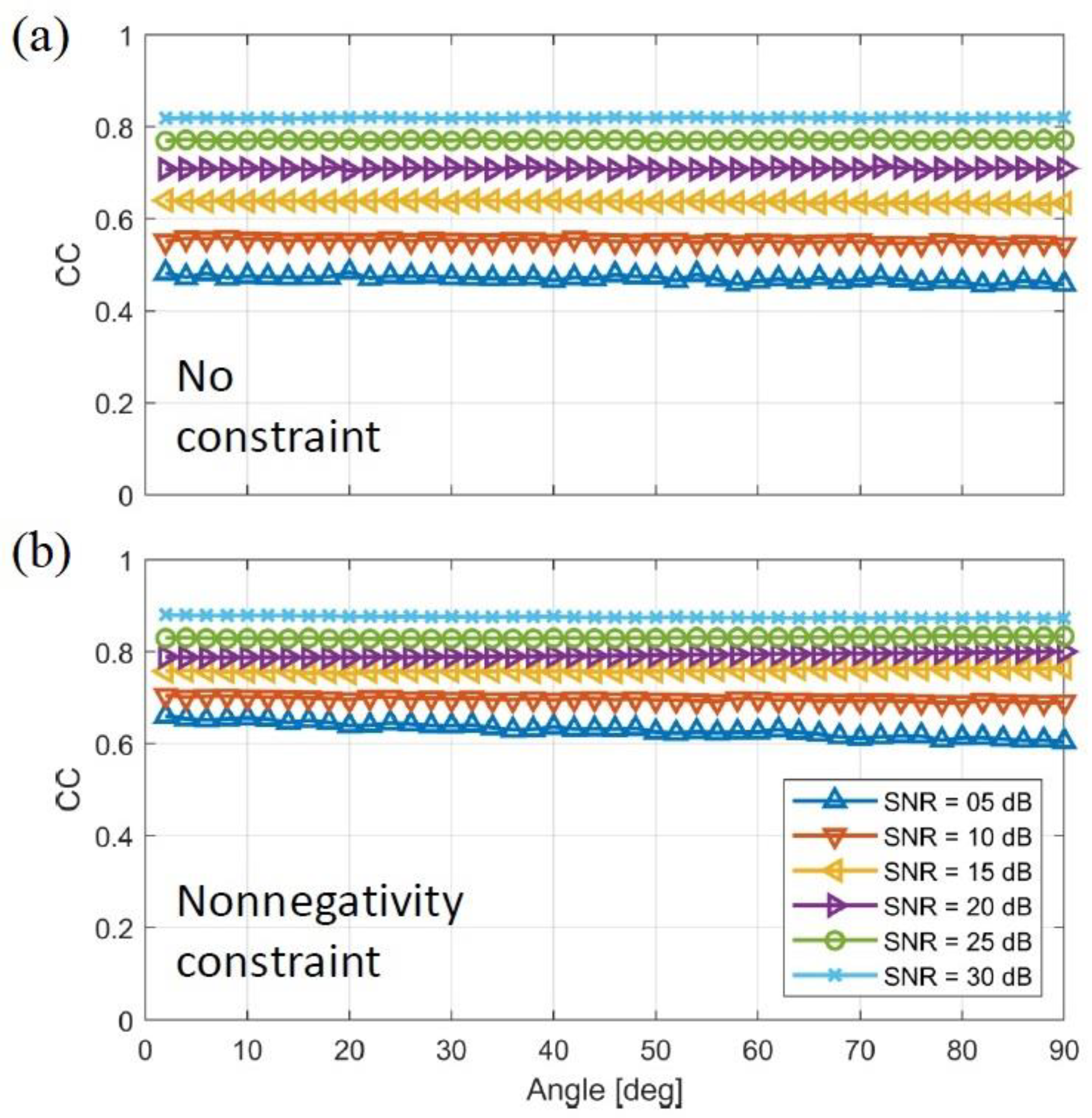
3.1. Simulation Results

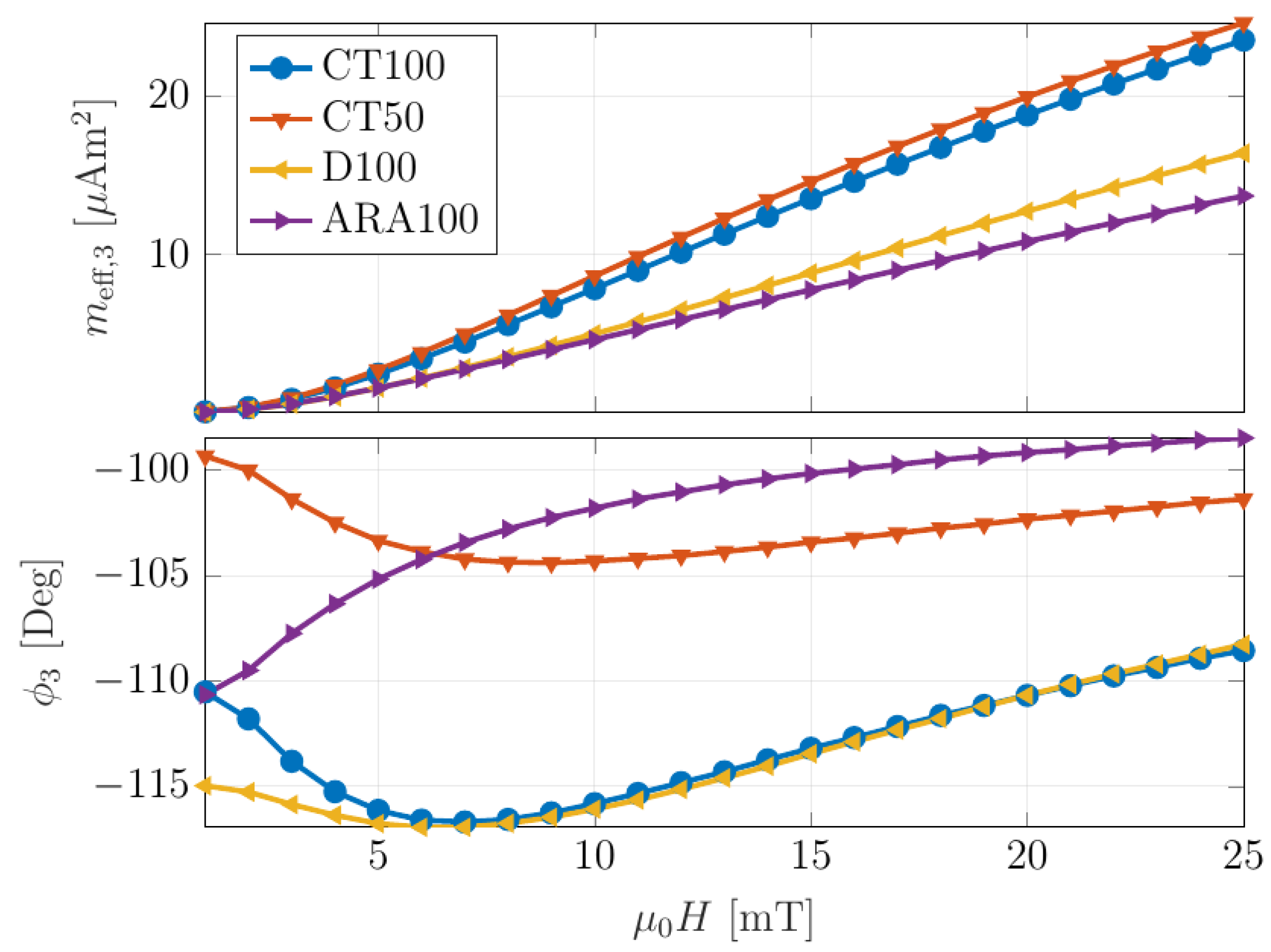
3.2. Experimental Results
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kowalewska, B.; Drozdz, W.; Kowalewski, L. Positron emission tomography (PET) and single-photon emission computed tomography (SPECT) in autism research: Literature review. Ir. J. Psychol. Med. 2021, 39, 272–286. [Google Scholar] [CrossRef] [PubMed]
- Reda, R.; Zanza, A.; Mazzoni, A.; Cicconetti, A.; Testarelli, L.; Di Nardo, D. An Update of the Possible Applications of Magnetic Resonance Imaging (MRI) in Dentistry: A Literature Review. J. Imaging 2021, 7, 75. [Google Scholar] [CrossRef] [PubMed]
- Withers, P.J.; Bouman, C.; Carmignato, S.; Cnudde, V.; Grimaldi, D.; Hagen, C.K.; Maire, E.; Manley, M.; Du Plessis, A.; Stock, S.R. X-ray computed tomography. Nat. Rev. Methods Prim. 2021, 1, 18. [Google Scholar] [CrossRef]
- Gleich, B.; Weizenecker, J. Tomographic imaging using the nonlinear response of magnetic particles. Nature 2005, 435, 1214–1217. [Google Scholar] [CrossRef]
- Buzug, T.M.; Bringout, G.; Erbe, M.; Gräfe, K.; Graeser, M.; Grüttner, M.; Halkola, A.; Sattel, T.F.; Tenner, W.; Wojtczyk, H.; et al. Magnetic particle imaging: Introduction to imaging and hardware realization. Z. Med. Phys. 2012, 22, 323–334. [Google Scholar] [CrossRef]
- Rahmer, J.; Weizenecker, J.; Gleich, B.; Borgert, J. Analysis of a 3-D System Function Measured for Magnetic Particle Imaging. IEEE Trans. Med. Imaging 2012, 31, 1289–1299. [Google Scholar] [CrossRef]
- Halkola, A.; Buzug, T.; Rahmer, J.; Gleich, B.; Bontus, C. System Calibration Unit for Magnetic Particle Imaging: Focus Field Based System Function. In Magnetic Particle Imaging; Springer: Berlin/Heidelberg, Germany, 2012; pp. 27–31. [Google Scholar]
- Bui, M.; Le, T.; Yoon, J. A Magnetic Particle Imaging-Based Navigation Platform for Magnetic Nanoparticles Using Interactive Manipulation of a Virtual Field Free Point to Ensure Targeted Drug Delivery. IEEE Trans. Ind. Electron. 2021, 68, 12493–12503. [Google Scholar] [CrossRef]
- Neumann, A.; Gräfe, K.; von Gladiss, A.; Ahlborg, M.; Behrends, A.; Chen, X.; Schumacher, J.; Soares, Y.B.; Friedrich, T.; Wei, H.; et al. Recent developments in magnetic particle imaging. J. Magn. Magn. Mater. 2022, 550, 169037. [Google Scholar] [CrossRef]
- Schofield, R.; King, L.; Tayal, U.; Castellano, I.; Stirrup, J.; Pontana, F.; Earls, J.; Nicol, E. Image reconstruction: Part 1—Understanding filtered back projection, noise and image acquisition. J. Cardiovasc. Comput. Tomogr. 2020, 14, 219–225. [Google Scholar] [CrossRef] [PubMed]
- Zhong, J.; Schilling, M.; Ludwig, F. Spatial and Temperature Resolutions of Magnetic Nanoparticle Temperature Imaging with a Scanning Magnetic Particle Spectrometer. Nanomaterials 2018, 8, 886. [Google Scholar] [CrossRef] [PubMed]
- Klemme, T.M.B.T.; Neumanna, A. Investigating methods for temperature reconstruction based on simulated data. Int. J. Magn. Part. Imaging 2022, 8. [Google Scholar] [CrossRef]
- Kim, D.; Sra, S.; Dhillon, I.S. A non-monotonic method for large-scale non-negative least squares. Optim. Methods Softw. 2013, 28, 1012–1039. [Google Scholar] [CrossRef]
- Lukat, N.; Friedrich, R.-M.; Spetzler, B.; Kirchhof, C.; Arndt, C.; Thormählen, L.; Faupel, F.; Selhuber-Unkel, C. Mapping of magnetic nanoparticles and cells using thin film magnetoelectric sensors based on the delta-E effect. Sens. Actuators A Phys. 2020, 309, 112023. [Google Scholar] [CrossRef]
- Muslu, Y.; Utkur, M.; Demirel, O.; Saritas, E.U. Calibration-Free Relaxation-Based Multi-Color Magnetic Particle Imaging. IEEE Trans. Med. Imaging 2018, 37, 1920–1931. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rahmer, J.; Halkola, A.; Gleich, B.; Schmale, I.; Borgert, J. First experimental evidence of the feasibility of multi-color magnetic particle imaging. Phys. Med. Biol. 2015, 60, 1775–1791. [Google Scholar] [CrossRef]
- Sadeghi, M.; Hojjat, Y.; Khodaei, M. Design, analysis, and optimization of a magnetoelectric actuator using regression modeling, numerical simulation and metaheuristics algorithm. J. Mater. Sci. Mater. Electron. 2019, 30, 16527–16538. [Google Scholar] [CrossRef]
- Lage, E.; Kirchhof, C.; Hrkac, V.; Kienle, L.; Jahns, R.; Knöchel, R.; Quandt, E.; Meyners, D. Exchange biasing of magnetoelectric composites. Nat. Mater. 2012, 11, 523–529. [Google Scholar] [CrossRef]
- Sadeghi, M.; Hojjat, Y.; Khodaei, M. Self-sensing feature of the ultrasonic nano-displacement actuator in Metglas/PMN-PT/Metglas. J. Mater. Sci. Mater. Electron. 2020, 31, 740–751. [Google Scholar] [CrossRef]
- Elzenheimer, E.; Bald, C.; Engelhardt, E.; Hoffmann, J.; Hayes, P.; Arbustini, J.; Bahr, A.; Quandt, E.; Höft, M.; Schmidt, G. Quantitative Evaluation for Magnetoelectric Sensor Systems in Biomagnetic Diagnostics. Sensors 2022, 22, 1018. [Google Scholar] [CrossRef]
- Friedrich, R.-M.; Zabel, S.; Galka, A.; Lukat, N.; Wagner, J.-M.; Kirchhof, C.; Quandt, E.; McCord, J.; Selhuber-Unkel, C.; Siniatchkin, M.; et al. Magnetic particle mapping using magnetoelectric sensors as an imaging modality. Sci. Rep. 2019, 9, 2086. [Google Scholar] [CrossRef]
- Murase, K.; Song, R.; Hiratsuka, S. Magnetic particle imaging of blood coagulation. Appl. Phys. Lett. 2014, 104, 252409. [Google Scholar] [CrossRef]
- Rauwerdink, A.M.; Weaver, J.B. Measurement of molecular binding using the Brownian motion of magnetic nanoparticle probes. Appl. Phys. Lett. 2010, 96, 033702. [Google Scholar] [CrossRef]
- Stehning, B.G.C.; Rahmer, J. Simultaneous magnetic particle imaging (MPI) and temperature mapping using multi-color MPI. Int. J. Mag. Part. Imag. 2016, 2, 1612001. [Google Scholar]
- Wells, J.; Paysen, H.; Kosch, O.; Trahms, L.; Wiekhorst, F. Temperature dependence in magnetic particle imaging. AIP Adv. 2017, 8, 056703. [Google Scholar] [CrossRef] [Green Version]
- Buchholz, S.B.O.; Sajjamark, K.; Chacon-Caldera, J.; Franke, J.; Hofman, U.G. MPI-based spatio-temporal estimation of a temperature profile induced by an IR laser. Int. J. Magn. Part. Imaging 2022, 8, 2203046. [Google Scholar]
- Durdaut, P.; Reermann, J.; Zabel, S.; Kirchhof, C.; Quandt, E.; Faupel, F.; Schmidt, G.; Knochel, R.; Hoft, M. Modeling and Analysis of Noise Sources for Thin-Film Magnetoelectric Sensors Based on the Delta-E Effect. IEEE Trans. Instrum. Meas. 2017, 66, 2771–2779. [Google Scholar] [CrossRef]
- Friedrich, R.-M.; Faupel, F. Adaptive Model for Magnetic Particle Mapping Using Magnetoelectric Sensors. Sensors 2022, 22, 894. [Google Scholar] [CrossRef]
- Hansen, C. Discrete Inverse Problems: Insight and Algorithms; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar]
- Fetisov, L.Y.; A Burdin, D.; A Ekonomov, N.; Chashin, D.V.; Zhang, J.; Srinivasan, G.; Fetisov, Y.K. Nonlinear magnetoelectric effects at high magnetic field amplitudes in composite multiferroics. J. Phys. D Appl. Phys. 2018, 51, 154003. [Google Scholar] [CrossRef]
- Jia, Y.; Yan, J.; Soga, K.; Seshia, A.A. Parametric resonance for vibration energy harvesting with design techniques to passively reduce the initiation threshold amplitude. Smart Mater. Struct. 2014, 23, 065011. [Google Scholar] [CrossRef]
- Available online: http://www.chemicell.com/products/Magnetic_Nanoparticle/Magnetic_Nanoparticles.html (accessed on 9 January 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic (Symbol) | Unit | Value |
|---|---|---|
| Resonance frequency (fr) | Hz | 7639 |
| Sensitivity (S) | kV/T | 93.0 |
| Noise density (Nd) | 385 | |
| Limit of detection (LOD) | 4 |
| Spatial Component (Symbol) | ||
|---|---|---|
| X | 0.0110 | 0.0588 |
| Y | 0.9958 | 0.0950 |
| Z | 0.0904 | 0.9937 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Friedrich, R.-M.; Sadeghi, M.; Faupel, F. Numerical and Experimental Study of Colored Magnetic Particle Mapping via Magnetoelectric Sensors. Nanomaterials 2023, 13, 347. https://doi.org/10.3390/nano13020347
Friedrich R-M, Sadeghi M, Faupel F. Numerical and Experimental Study of Colored Magnetic Particle Mapping via Magnetoelectric Sensors. Nanomaterials. 2023; 13(2):347. https://doi.org/10.3390/nano13020347
Chicago/Turabian StyleFriedrich, Ron-Marco, Mohammad Sadeghi, and Franz Faupel. 2023. "Numerical and Experimental Study of Colored Magnetic Particle Mapping via Magnetoelectric Sensors" Nanomaterials 13, no. 2: 347. https://doi.org/10.3390/nano13020347