
Reconfigurable, Stretchable Strain Sensor with the Localized Controlling of Substrate Modulus by Two-Phase Liquid Metal Cells
 , , , and
, , , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Preparation of Graphene/CNTs Hybrid Film
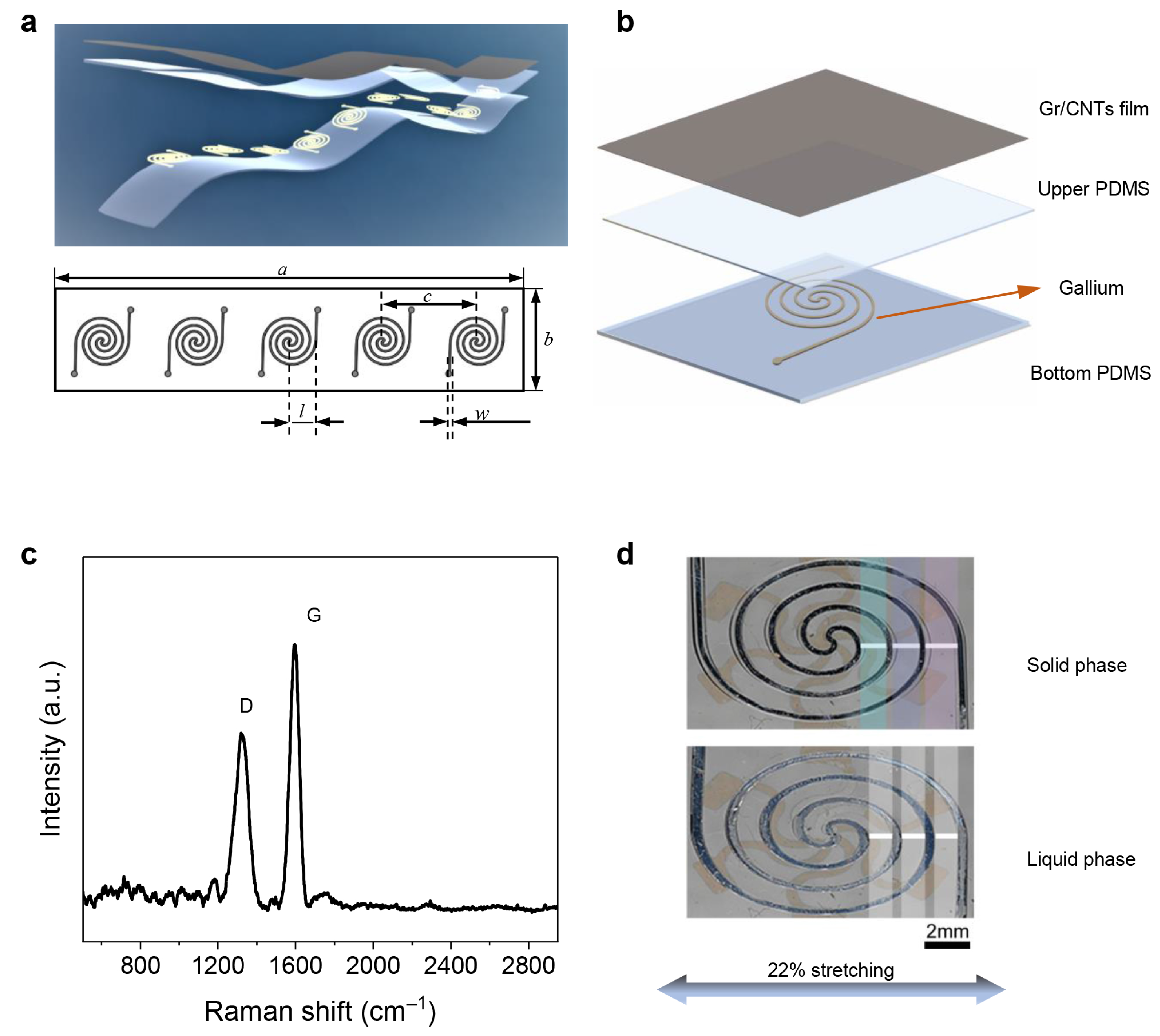
2.3. Preparation of the Heterogeneous Substrate-Based Strain Sensors
2.4. Characterization and Measurements
2.5. Finite Element Analysis
3. Results and Discussion
3.1. The Modulation of Deformation with The Heterogeneous Substrate
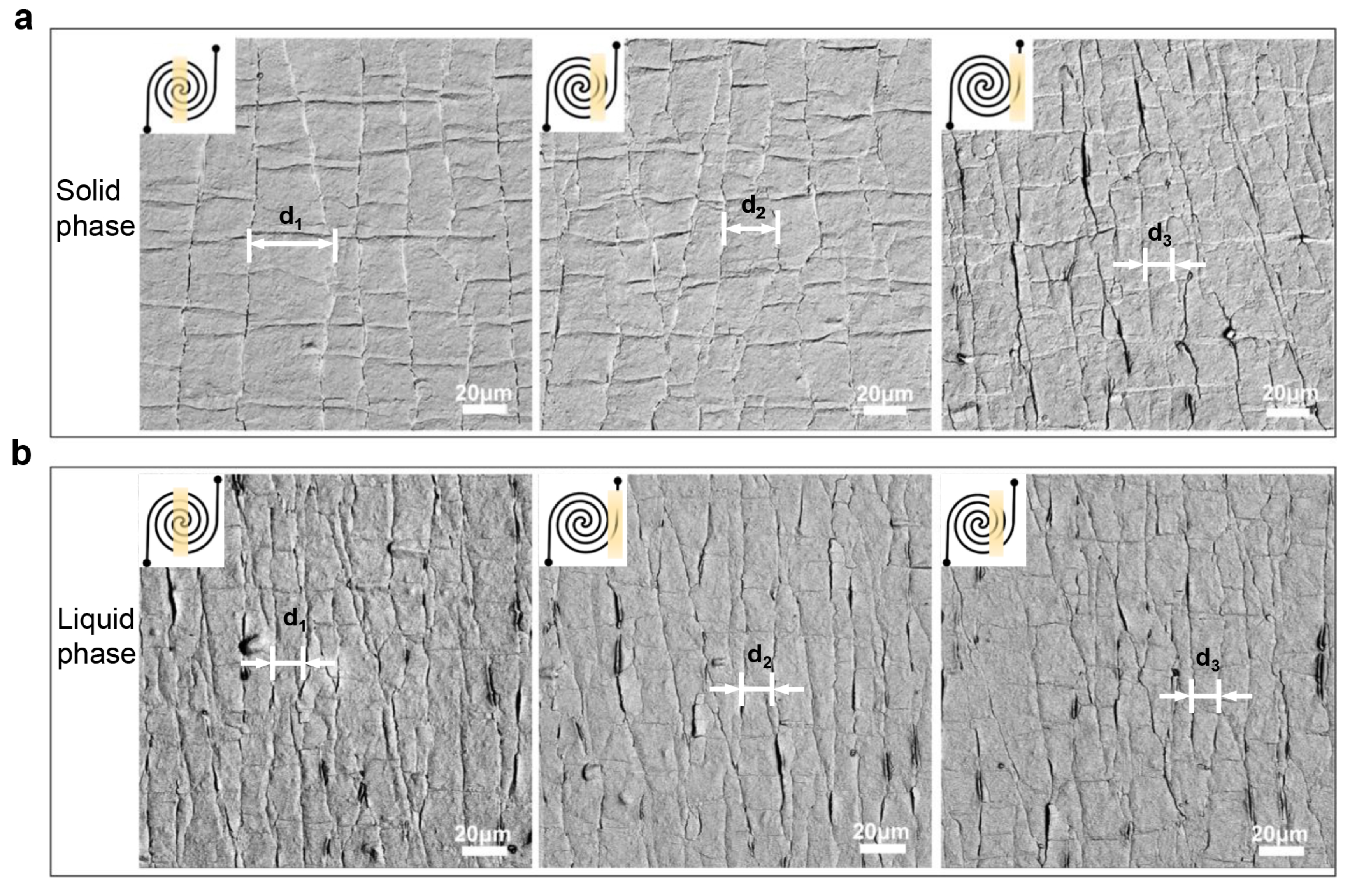
3.2. Morphological Properties of the Active Materials
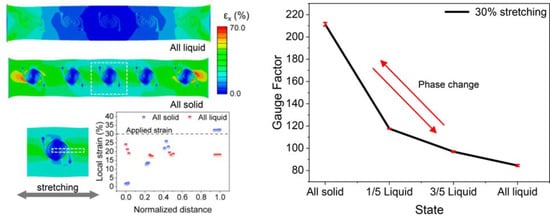
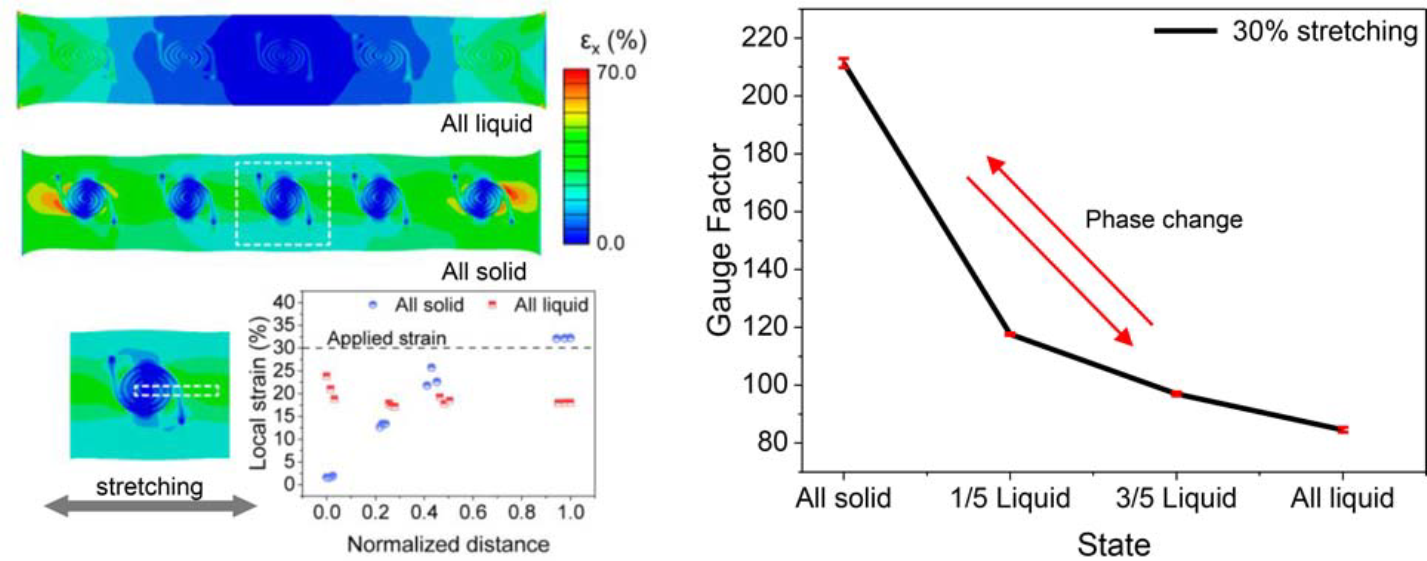
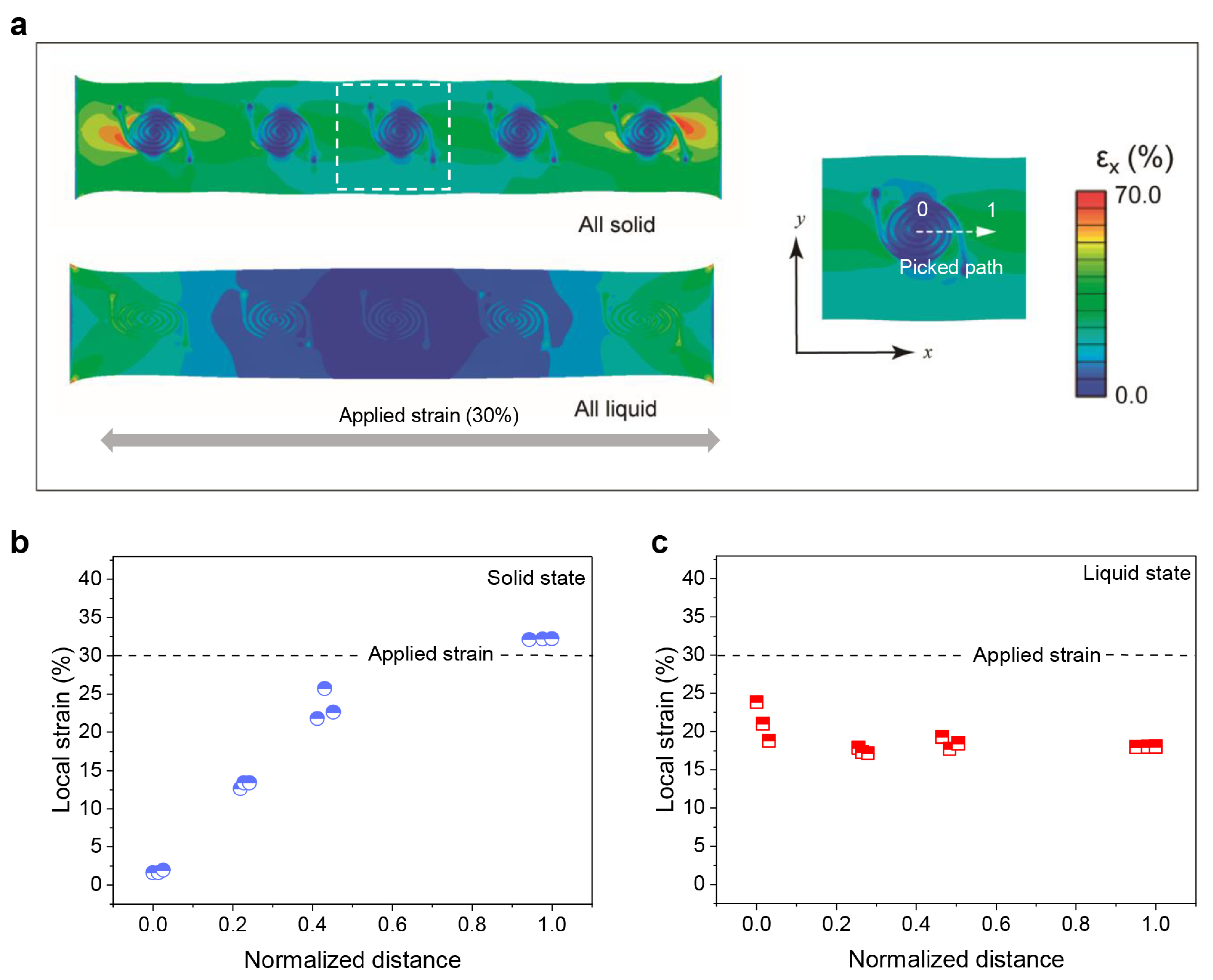
3.3. FEA Analysis of The Strain Distribution in the Heterogeneous Substrate
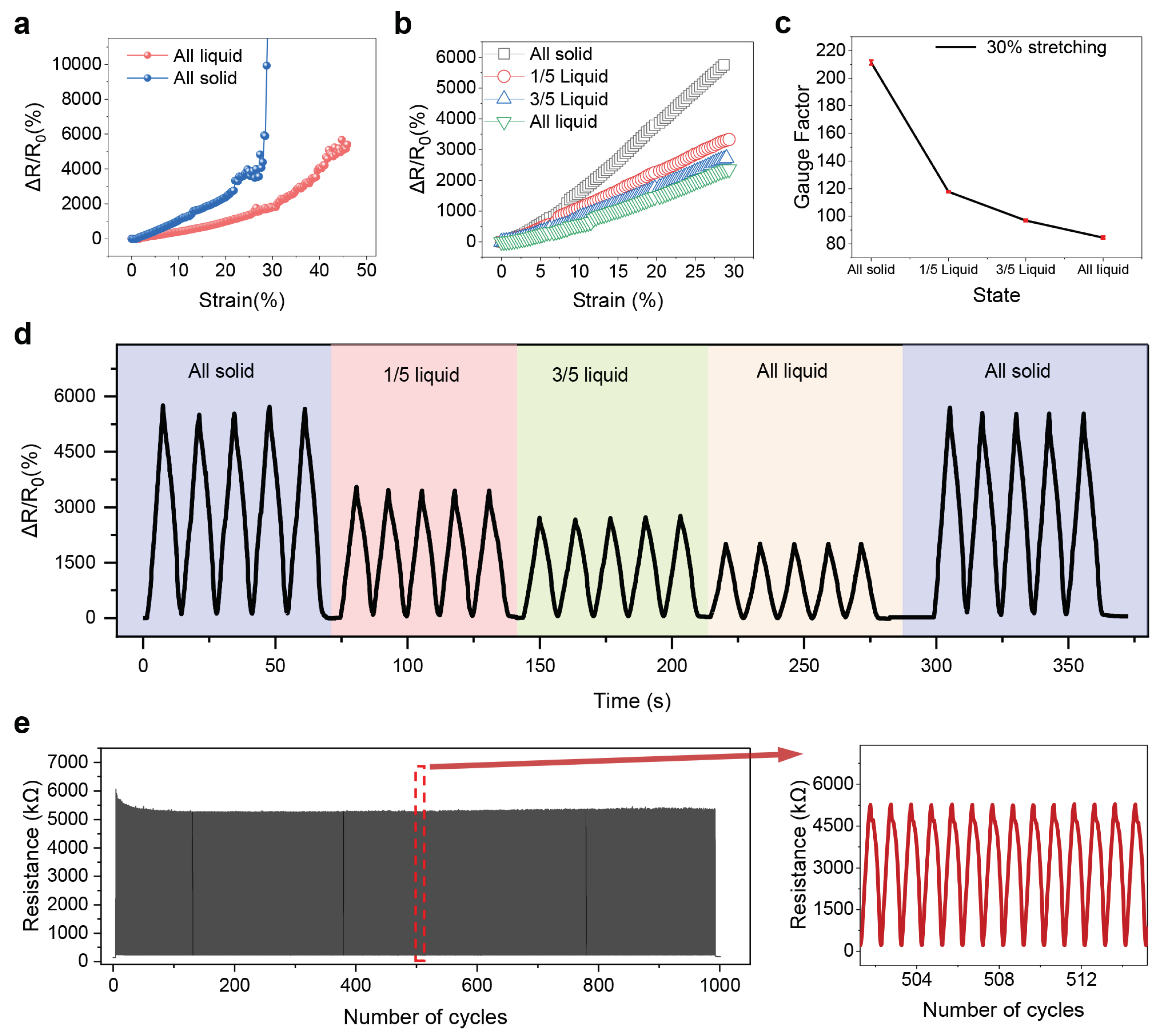
3.4. Resistance Response Properties of the Stretchable Strain Sensor with Heterogeneous Substrate
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Liao, X.; Wang, W.; Wang, L.; Tang, K.; Zheng, Y. Controllably enhancing stretchability of highly sensitive fiber-based strain sensors for intelligent monitoring. ACS Appl. Mater. Interfaces 2018, 11, 2431–2440. [Google Scholar] [CrossRef] [PubMed]
- You, I.; Mackanic, D.G.; Matsuhisa, N.; Kang, J.; Kwon, J.; Beker, L.; Mun, J.; Suh, W.; Kim, T.Y.; Tok, J.B.H.; et al. Artificial multimodal receptors based on ion relaxation dynamics. Science 2020, 370, 961–965. [Google Scholar] [CrossRef] [PubMed]
- Xu, K.; Fujita, Y.; Lu, Y.; Honda, S.; Shiomi, M.; Arie, T.; Akita, S.; Takei, K. A wearable body condition sensor system with wireless feedback alarm functions. Adv. Mater. 2021, 33, 2008701. [Google Scholar] [CrossRef]
- Gariya, N.; Kumar, P. A review on soft materials utilized for the manufacturing of soft robots. Mater. Today Proc. 2021, 46, 11177–11181. [Google Scholar] [CrossRef]
- Liao, X.; Song, W.; Zhang, X.; Jin, H.; Liu, S.; Wang, Y.; Thean, A.V.Y.; Zheng, Y. An Artificial Peripheral Neural System Based on Highly Stretchable and Integrated Multifunctional Sensors. Adv. Funct. Mater. 2021, 31, 2101107. [Google Scholar] [CrossRef]
- Kim, K.K.; Suh, Y.; Ko, S.H. Smart Stretchable Electronics for Advanced Human–Machine Interface. Adv. Intell. Syst. 2021, 3, 2000157. [Google Scholar] [CrossRef]
- Liao, X.; Song, W.; Zhang, X.; Huang, H.; Wang, Y.; Zheng, Y. Directly printed wearable electronic sensing textiles towards human–machine interfaces. J. Mater. Chem. C 2018, 6, 12841–12848. [Google Scholar] [CrossRef]
- Jeong, Y.R.; Park, H.; Jin, S.W.; Hong, S.Y.; Lee, S.S.; Ha, J.S. Highly stretchable and sensitive strain sensors using fragmentized graphene foam. Adv. Funct. Mater. 2015, 25, 4228–4236. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, X.; Yu, H.; Lubineau, G. Deformable and wearable carbon nanotube microwire-based sensors for ultrasensitive monitoring of strain, pressure and torsion. Nanoscale 2017, 9, 604–612. [Google Scholar] [CrossRef] [PubMed]
- Dejace, L.; Laubeuf, N.; Furfaro, I.; Lacour, S.P. Gallium-based thin films for wearable human motion sensors. Adv. Intell. Syst. 2019, 1, 1900079. [Google Scholar] [CrossRef] [Green Version]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly stretchable and sensitive strain sensor based on silver nanowire—Elastomer nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef]
- Huang, S.; He, G.; Yang, C.; Wu, J.; Guo, C.; Hang, T.; Li, B.; Yang, C.; Liu, D.; Chen, H.J.; et al. Stretchable strain vector sensor based on parallelly aligned vertical graphene. ACS Appl. Mater. Interfaces 2018, 11, 1294–1302. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, J.; Li, Y.; Shi, G. High-performance strain sensors with fish-scale-like graphene-sensing layers for full-range detection of human motions. ACS Nano 2016, 10, 7901–7906. [Google Scholar] [CrossRef]
- Liu, Z.; Qi, D.; Hu, G.; Wang, H.; Jiang, Y.; Chen, G.; Luo, Y.; Loh, X.J.; Liedberg, B.; Chen, X. Surface strain redistribution on structured microfibers to enhance sensitivity of fiber-shaped stretchable strain sensors. Adv. Mater. 2018, 30, 1704229. [Google Scholar] [CrossRef]
- Xu, K.; Lu, Y.; Honda, S.; Arie, T.; Akita, S.; Takei, K. Highly stable kirigami-structured stretchable strain sensors for perdurable wearable electronics. J. Mater. Chem. C 2019, 7, 9609–9617. [Google Scholar] [CrossRef]
- Li, Q.; Li, J.; Tran, D.; Luo, C.; Gao, Y.; Yu, C.; Xuan, F. Engineering of carbon nanotube/polydimethylsiloxane nanocomposites with enhanced sensitivity for wearable motion sensors. J. Mater. Chem. C 2017, 5, 11092–11099. [Google Scholar] [CrossRef]
- Lee, J.; Pyo, S.; Kwon, D.S.; Jo, E.; Kim, W.; Kim, J. Ultrasensitive strain sensor based on separation of overlapped carbon nanotubes. Small 2019, 15, 1805120. [Google Scholar] [CrossRef]
- He, Y.; Wu, D.; Zhou, M.; Zheng, Y.; Wang, T.; Lu, C.; Zhang, L.; Liu, H.; Liu, C. Wearable strain sensors based on a porous polydimethylsiloxane hybrid with carbon nanotubes and graphene. ACS Appl. Mater. Interfaces 2021, 13, 15572–15583. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.Q.; Zheng, P.X.; Cong, H.L.; Wan, A.L. Facile fabrication of flexible strain sensors with AgNPs-decorated CNTs based on nylon/PU fabrics through polydopamine templates. Appl. Surf. Sci. 2021, 558, 149931. [Google Scholar] [CrossRef]
- Ke, K.; Wang, Y.; Li, Y.; Yang, J.; Potschke, P.; Voit, B. Nuomici-inspired universal strategy for boosting piezoresistive sensitivity and elasticity of polymer nanocomposite-based strain sensors. ACS Appl. Mater. Interfaces 2019, 11, 35362–35370. [Google Scholar] [CrossRef]
- Qiu, A.; Li, P.; Yang, Z.; Yao, Y.; Lee, I.; Ma, J. A path beyond metal and silicon: Polymer/nanomaterial composites for stretchable strain sensors. Adv. Funct. Mater. 2019, 29, 1806306. [Google Scholar] [CrossRef]
- Liu, X.; Liang, X.; Lin, Z.; Lei, Z.; Xiong, Y.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C.P. Highly sensitive and stretchable strain sensor based on a synergistic hybrid conductive network. ACS Appl. Mater. Interfaces 2020, 12, 42420–42429. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Dai, K.; Ren, M.; Wang, Y.; Zheng, G.; Liu, C.; Shen, C. Aligned flexible conductive fibrous networks for highly sensitive, ultrastretchable and wearable strain sensors. J. Mater. Chem. C 2018, 6, 6575–6583. [Google Scholar] [CrossRef]
- Chen, S.; Wei, Y.; Yuan, X.; Lin, Y.; Liu, L. A highly stretchable strain sensor based on a graphene/silver nanoparticle synergic conductive network and a sandwich structure. J. Mater. Chem. C 2016, 4, 4304–4311. [Google Scholar] [CrossRef]
- Liu, M.; Li, S.; Kinloch, I.A.; Young, R.J.; Papageorgiou, D.G. Anisotropic swelling of elastomers filled with aligned 2D materials. 2D Mater. 2020, 7, 025031. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Wang, S.; Rastak, R.; Ochiai, Y.; Niu, S.; Jiang, Y.; Arunachala, P.K.; Zheng, Y.; Xu, J.; Matsuhisa, N.; et al. Strain-insensitive intrinsically stretchable transistors and circuits. Nat. Electron. 2021, 4, 143–150. [Google Scholar] [CrossRef]
- Pan, S.; Liu, Z.; Wang, M.; Jiang, Y.; Luo, Y.; Wan, C.; Qi, D.; Wang, C.; Ge, X.; Chen, X. Mechanocombinatorially screening sensitivity of stretchable strain sensors. Adv. Mater. 2019, 31, 1903130. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, Z.; Matsuhisa, N.; Qi, D.; Leow, W.R.; Yang, H.; Yu, J.; Chen, G.; Liu, Y.; Wan, C.; et al. Auxetic mechanical metamaterials to enhance sensitivity of stretchable strain sensors. Adv. Mater. 2018, 30, 1706589. [Google Scholar] [CrossRef] [PubMed]
- Rao, Z.; Thukral, A.; Yang, P.; Lu, Y.; Shim, H.; Wu, W.; Karim, A.; Yu, C. All-Polymer Based Stretchable Rubbery Electronics and Sensors. Adv. Funct. Mater. 2021, 2111232. [Google Scholar] [CrossRef]
- Piskarev, Y.; Shintake, J.; Ramachandran, V.; Baugh, N.; Dickey, M.D.; Floreano, D. Lighter and Stronger: Cofabricated Electrodes and Variable Stiffness Elements in Dielectric Actuators. Adv. Intell. Syst. 2020, 2, 2000069. [Google Scholar] [CrossRef]
- Shi, J.; Li, X.; Cheng, H.; Liu, Z.; Zhao, L.; Yang, T.; Dai, Z.; Cheng, Z.; Shi, E.; Yang, L.; et al. Graphene reinforced carbon nanotube networks for wearable strain sensors. Adv. Funct. Mater. 2016, 26, 2078–2084. [Google Scholar] [CrossRef]
- Shi, J.; Hu, J.; Dai, Z.; Zhao, W.; Liu, P.; Zhao, L.; Guo, Y.; Yang, T.; Zou, L.; Jiang, K.; et al. Graphene welded carbon nanotube crossbars for biaxial strain sensors. Carbon 2017, 123, 786–793. [Google Scholar] [CrossRef]
- Schubert, B.E.; Floreano, D. Variable stiffness material based on rigid low-melting-point-alloy microstructures embedded in soft poly (dimethylsiloxane)(PDMS). RSC Adv. 2013, 3, 24671–24679. [Google Scholar] [CrossRef] [Green Version]
- Shan, W.; Lu, T.; Majidi, C. Soft-matter composites with electrically tunable elastic rigidity. Smart Mater. Struct. 2013, 22, 085005. [Google Scholar] [CrossRef]
- Souri, H.; Banerjee, H.; Jusufi, A.; Radacsi, N.; Stokes, A.A.; Park, I.; Sitti, M.; Amjadi, M. Wearable and stretchable strain sensors: Materials, sensing mechanisms, and applications. Adv. Intell. Syst. 2020, 2, 2000039. [Google Scholar] [CrossRef]
- Wu, S.; Peng, S.; Han, Z.J.; Zhu, H.; Wang, C.H. Ultrasensitive and Stretchable Strain Sensors Based on Mazelike Vertical Graphene Network. ACS Appl. Mater. Interfaces 2018, 10, 36312–36322. [Google Scholar] [CrossRef]
- Yang, Y.F.; Tao, L.Q.; Pang, Y.; Tian, H.; Ju, Z.Y.; Wu, X.M.; Yang, Y.; Ren, T.L. An ultrasensitive strain sensor with a wide strain range based on graphene armour scales. Nanoscale 2018, 10, 11524–11530. [Google Scholar] [CrossRef]
- Lin, S.; Zhao, X.; Jiang, X.; Wu, A.; Ding, H.; Zhong, Y.; Li, J.; Pan, J.; Liu, B.; Zhu, H. Highly Stretchable, Adaptable, and Durable Strain Sensing Based on a Bioinspired Dynamically Cross-Linked Graphene/Polymer Composite. Small 2019, 15, e1900848. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, L.; Pan, T.; Guo, J.; Ke, Y.; Zhu, J.; Cheng, H.; Lin, Y. Reconfigurable, Stretchable Strain Sensor with the Localized Controlling of Substrate Modulus by Two-Phase Liquid Metal Cells. Nanomaterials 2022, 12, 882. https://doi.org/10.3390/nano12050882
Mao L, Pan T, Guo J, Ke Y, Zhu J, Cheng H, Lin Y. Reconfigurable, Stretchable Strain Sensor with the Localized Controlling of Substrate Modulus by Two-Phase Liquid Metal Cells. Nanomaterials. 2022; 12(5):882. https://doi.org/10.3390/nano12050882
Chicago/Turabian StyleMao, Linna, Taisong Pan, Junxiong Guo, Yizhen Ke, Jia Zhu, Huanyu Cheng, and Yuan Lin. 2022. "Reconfigurable, Stretchable Strain Sensor with the Localized Controlling of Substrate Modulus by Two-Phase Liquid Metal Cells" Nanomaterials 12, no. 5: 882. https://doi.org/10.3390/nano12050882