
A Piezoresistive Sensor with High Sensitivity and Flexibility Based on Porous Sponge
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
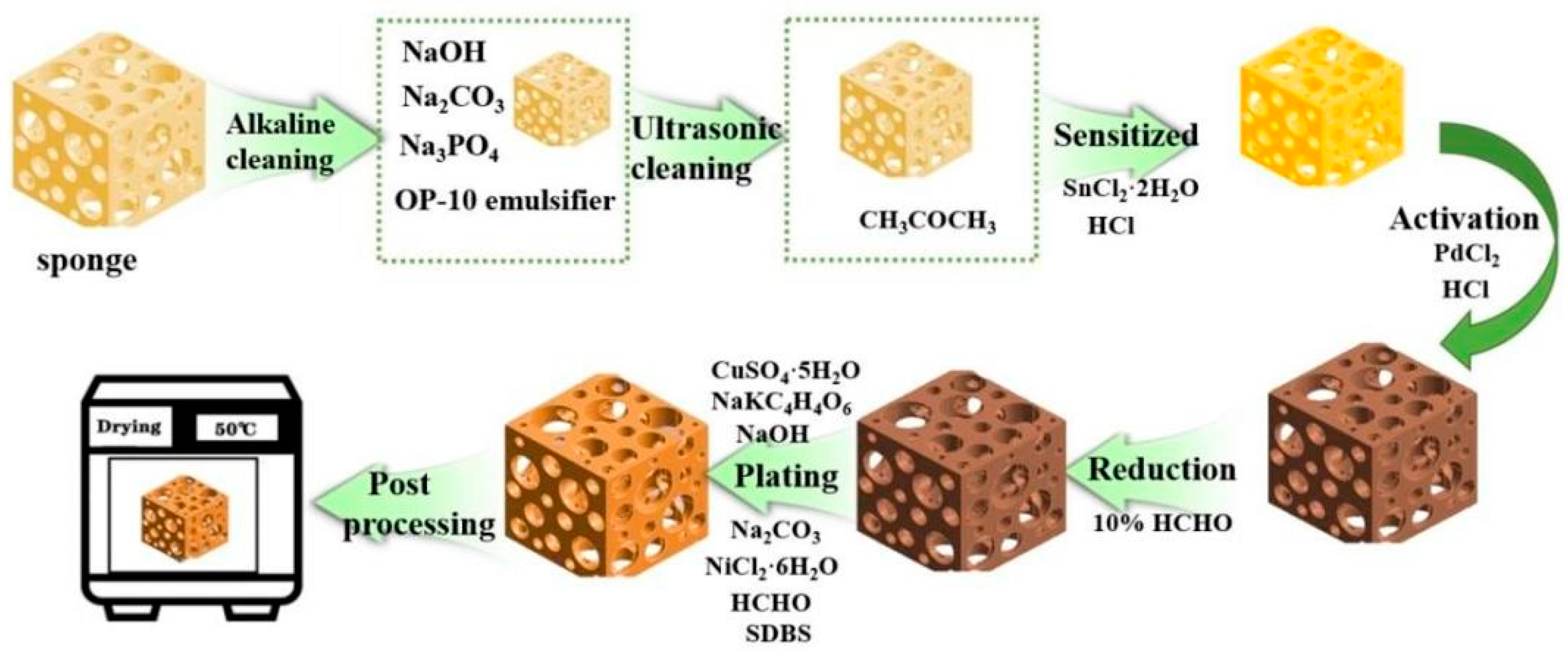
2.2. Preparation Methods
- ①
- Cleaning
- ②
- Sensitization
- ③
- Activation
- ④
- Reduction
- ⑤
- Plating
- ⑥
- Post-processing
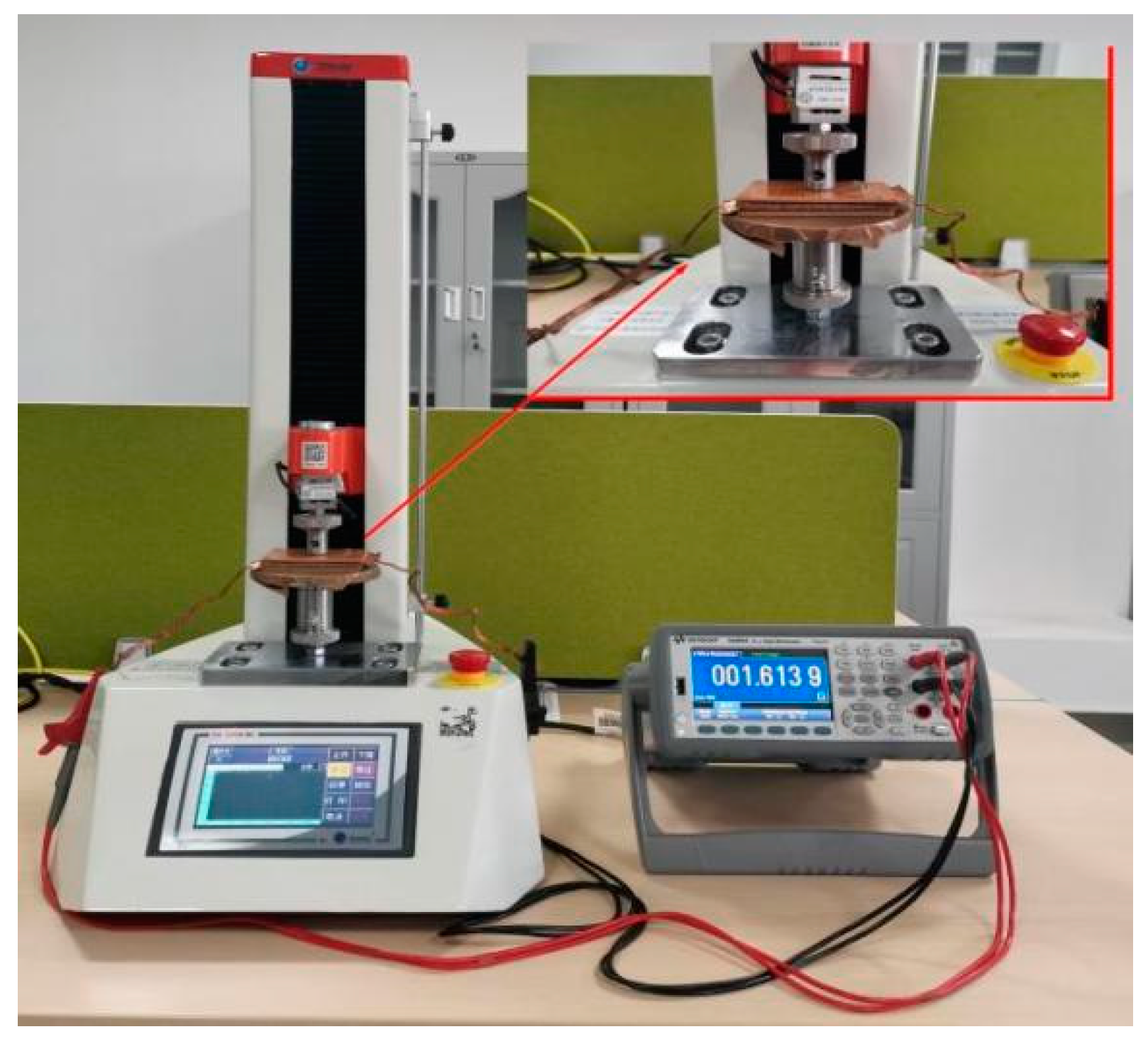
2.3. Testing Methods
2.4. Finite Element Analysis
3. Results and Discussions
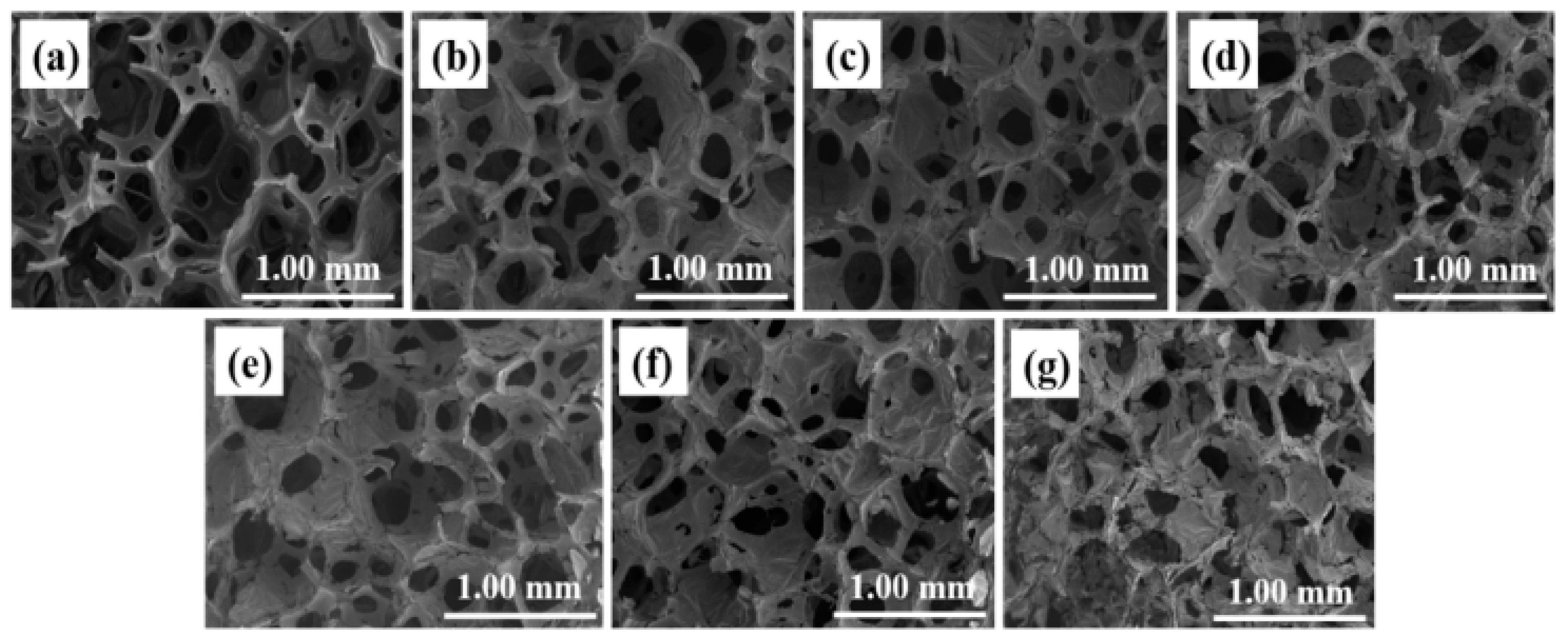
3.1. Structural Analysis
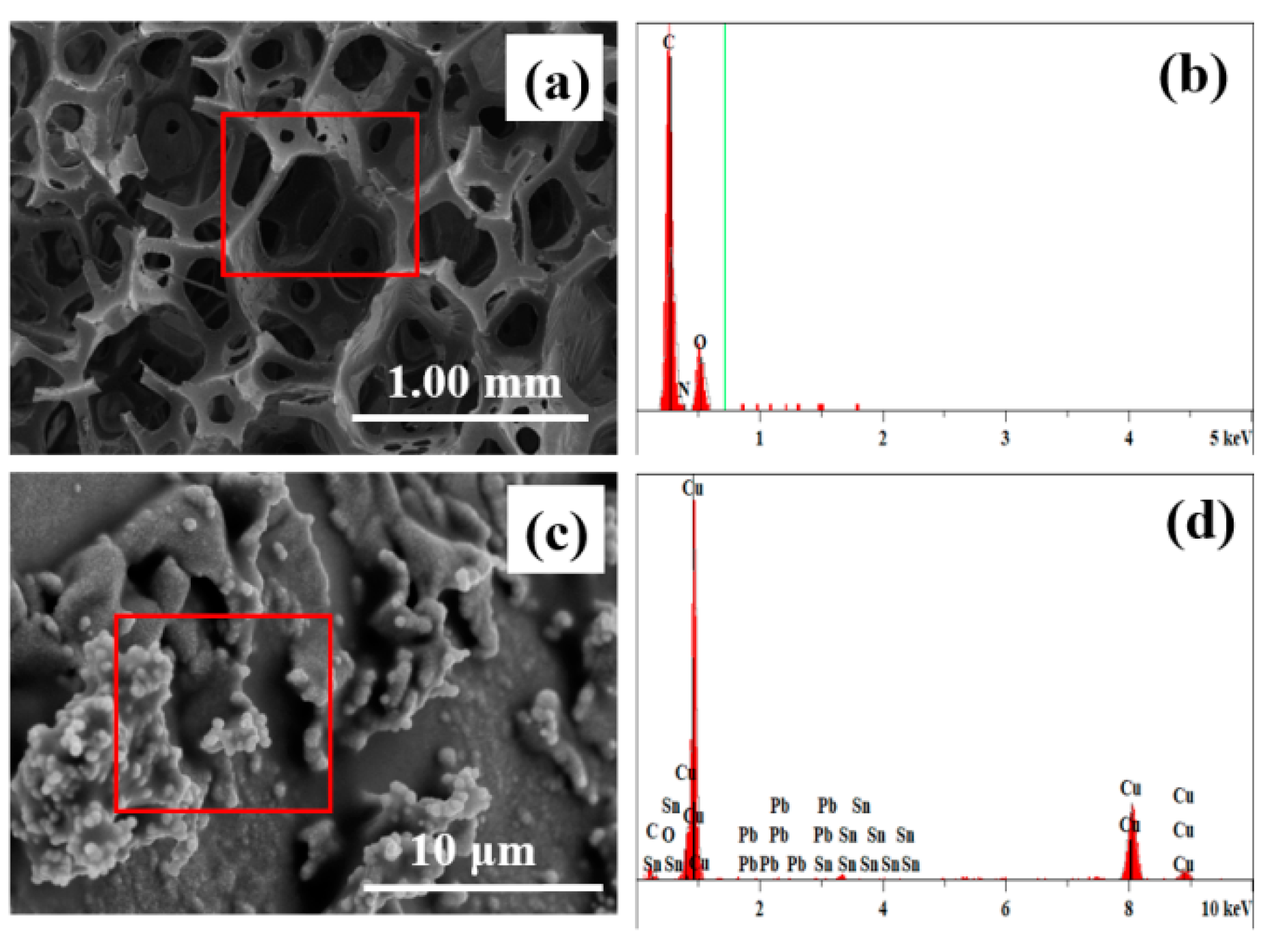
3.2. Elemental Analysis
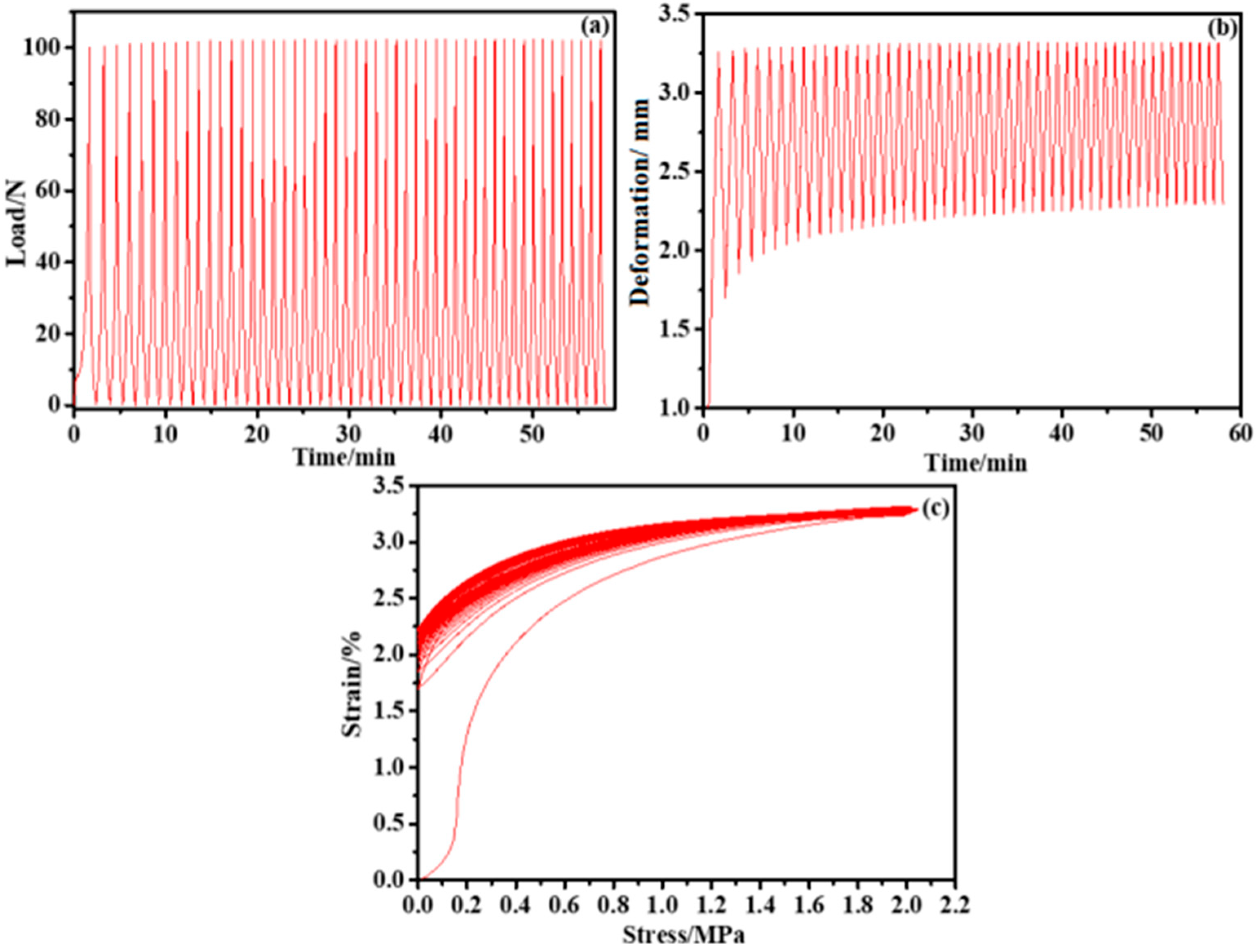
3.3. Mechanical Property Analysis
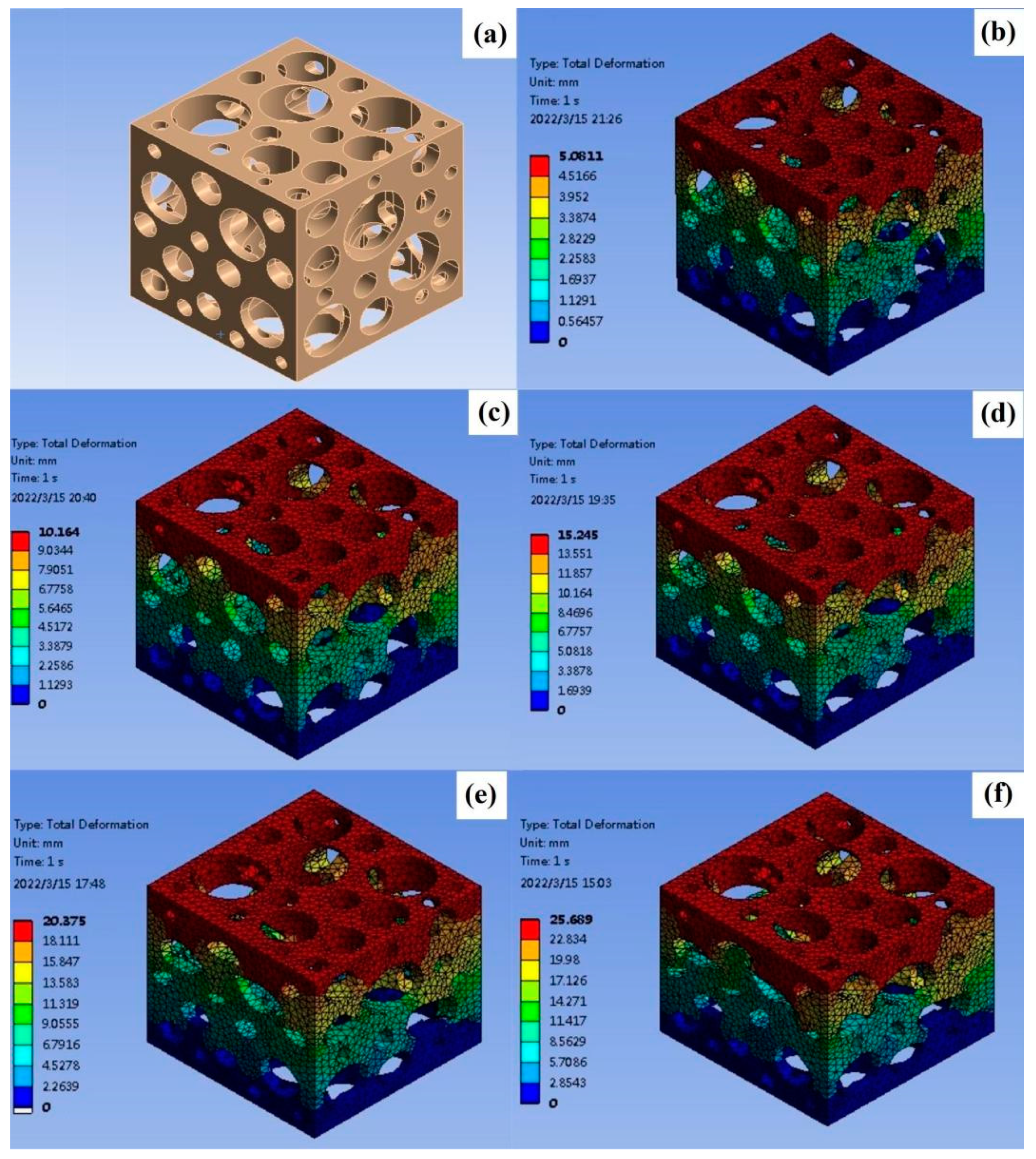
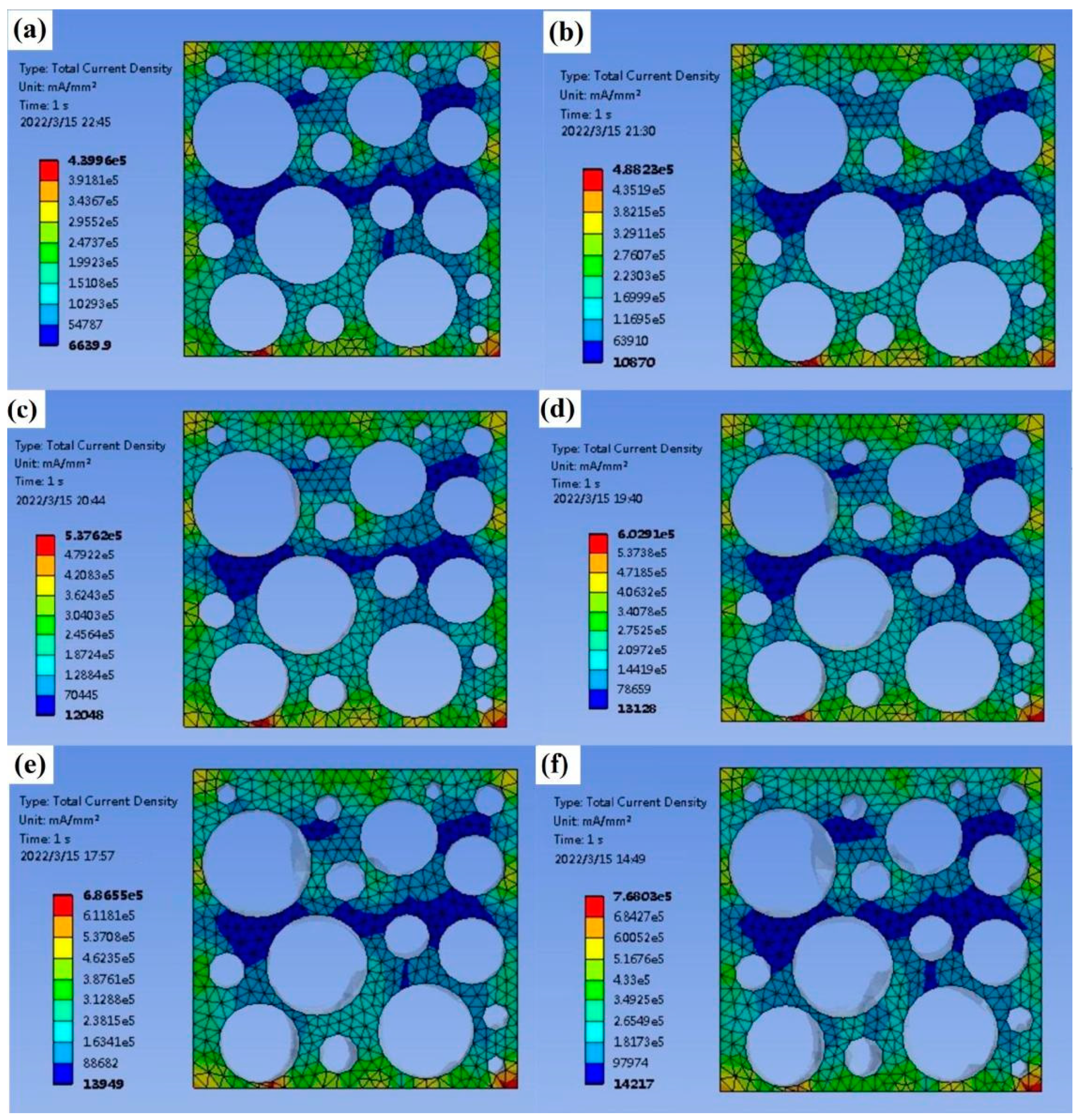
3.4. Finite Element Analysis
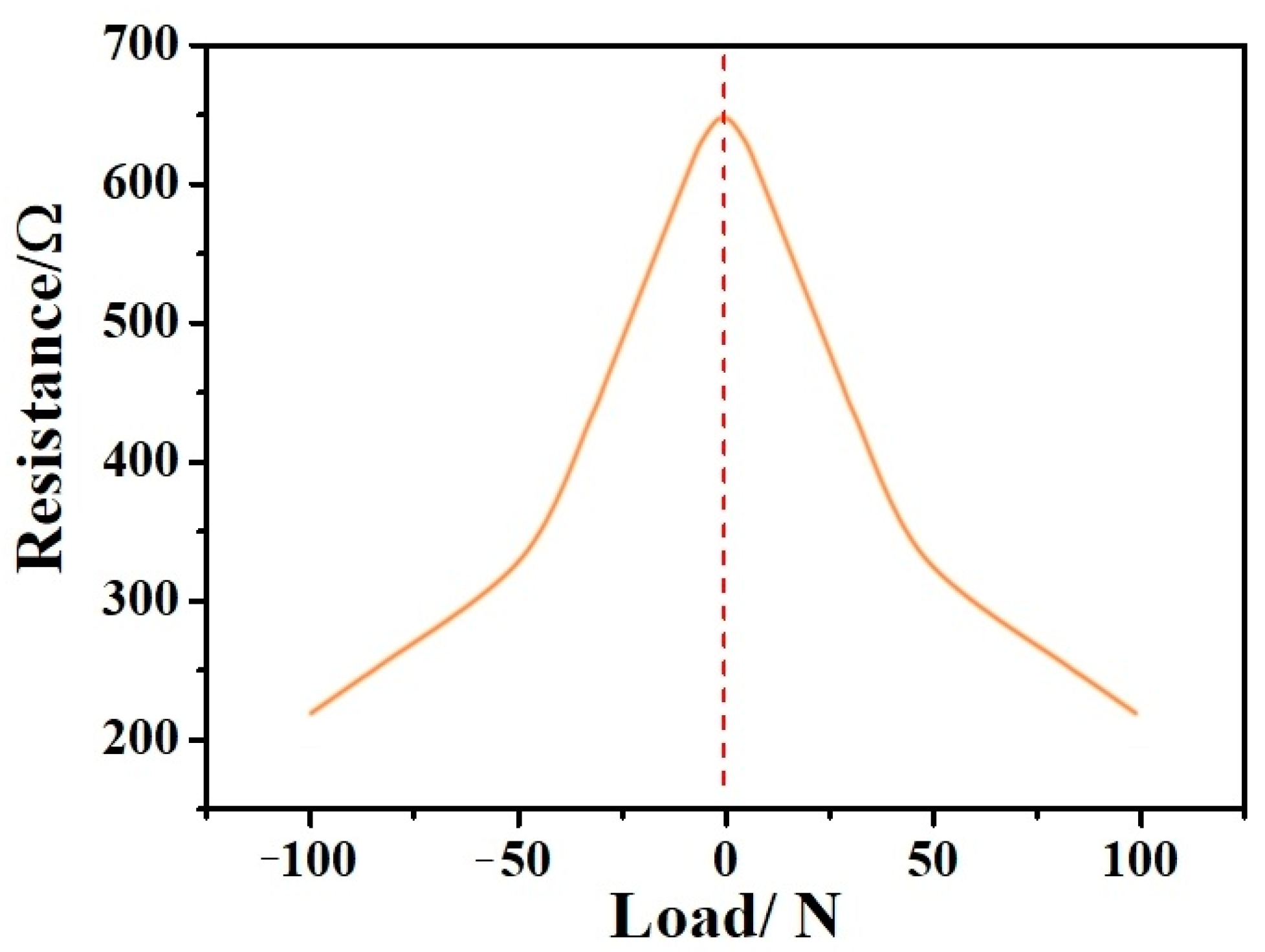
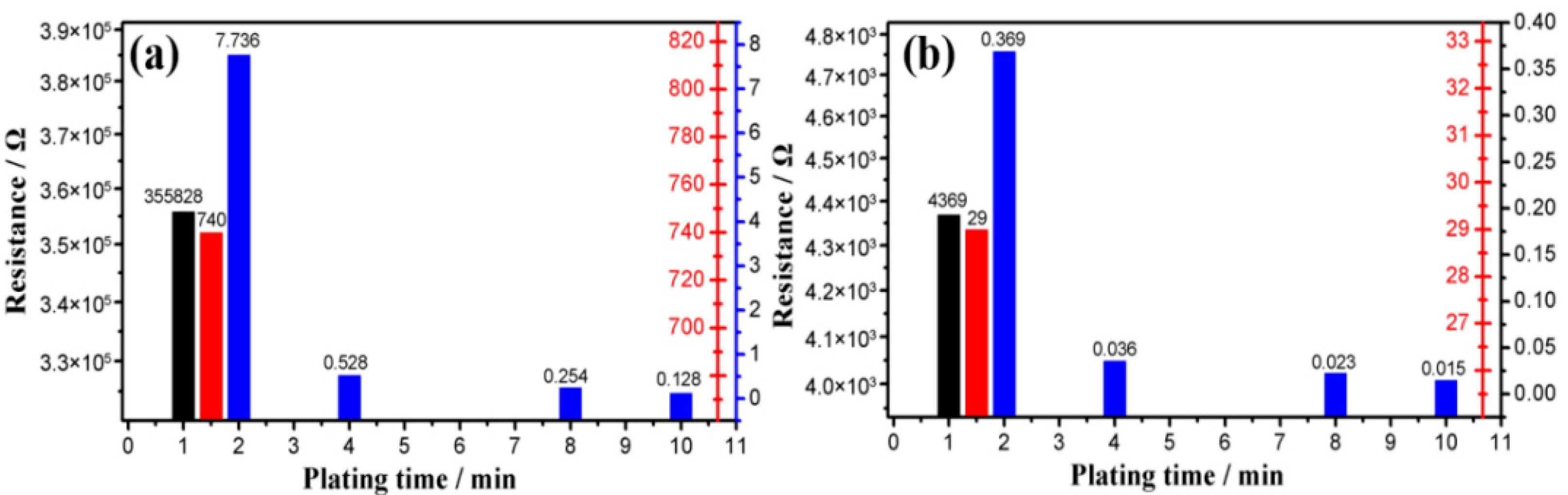
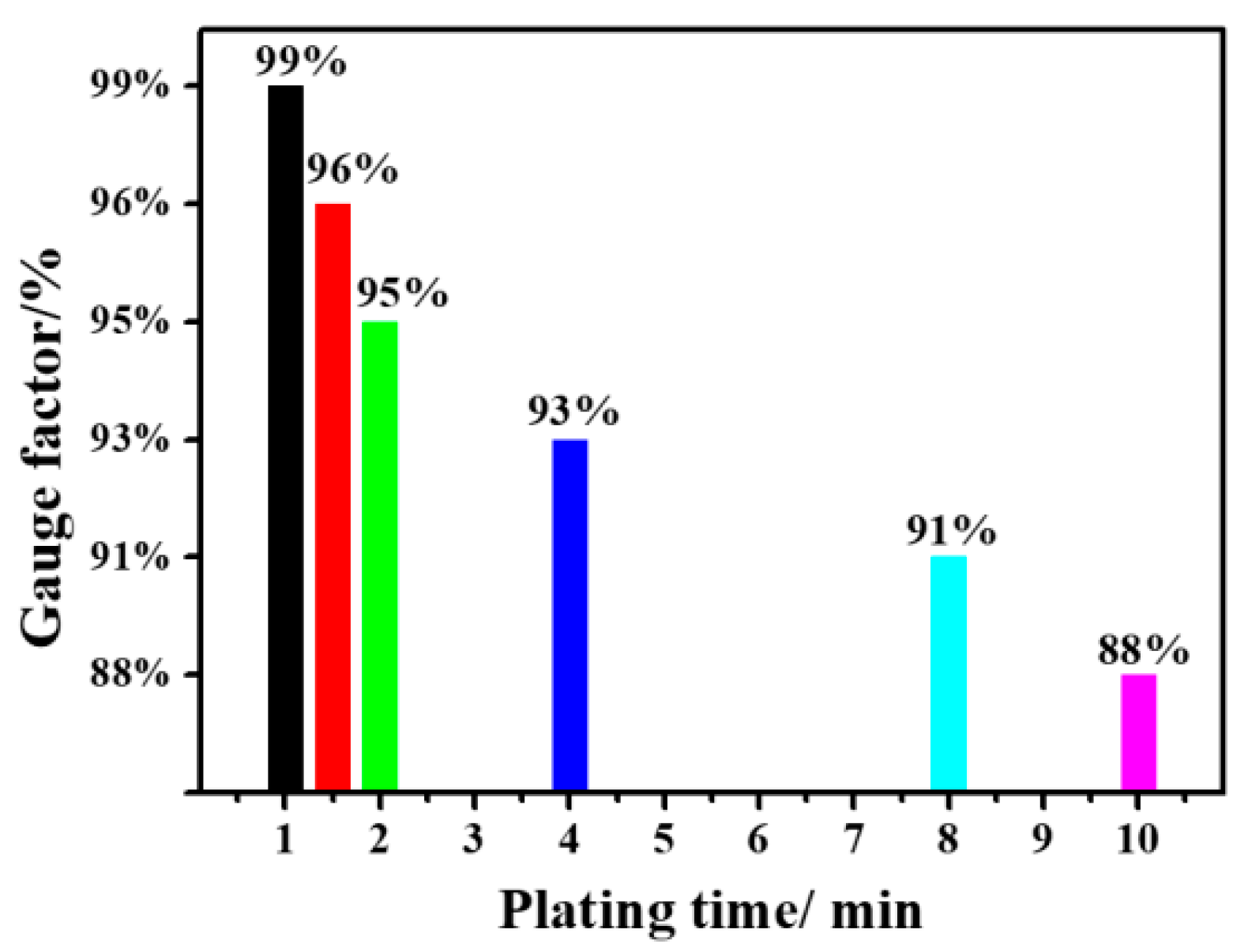
3.5. Sensor Performance Analysis
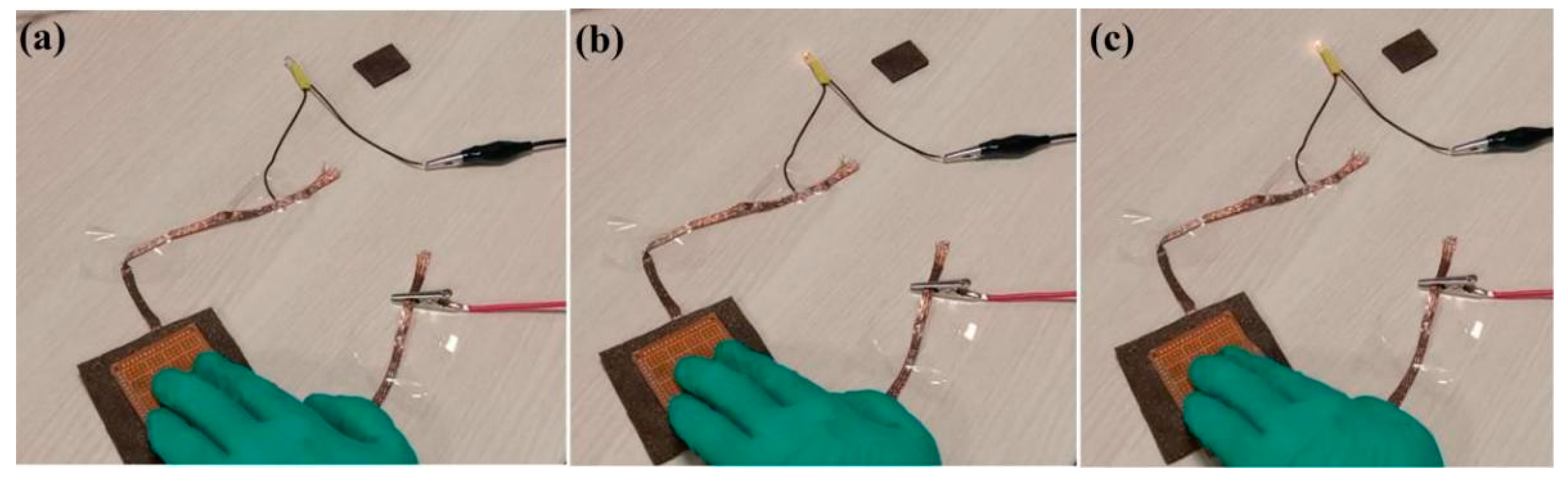
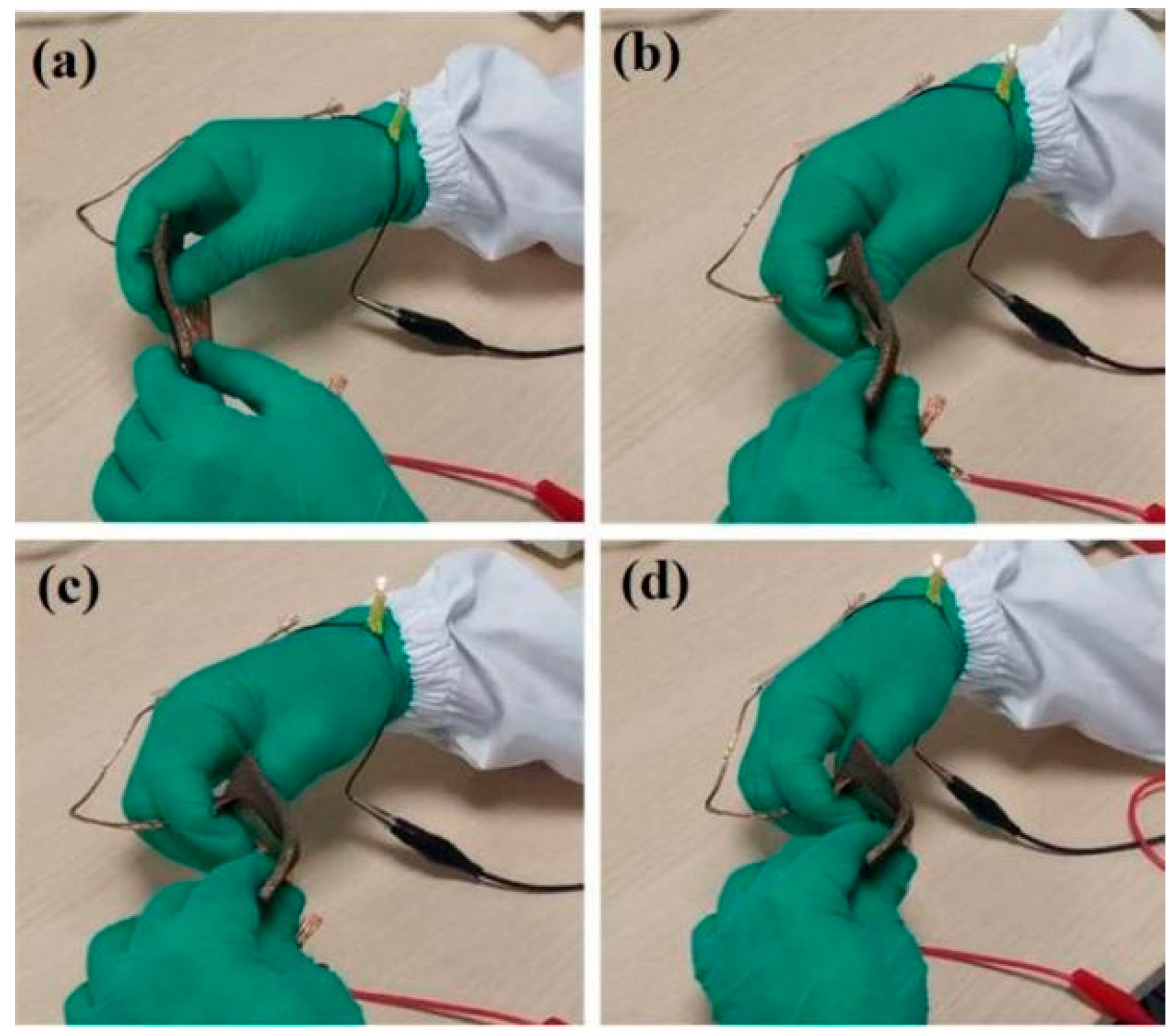
3.6. Sensor’s Application Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Trung, T.-Q.; Lee, N.-E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoring and Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef] [PubMed]
- Mukundan, A.; Feng, S.-W.; Weng, Y.-H.; Tsao, Y.-M.; Artemkina, S.-B.; Fedorov, V.-E.; Lin, Y.-S.; Huang, Y.-C.; Wang, H.-C. Optical and Material Characteristics of MoS2/Cu2O Sensor for Detection of Lung Cancer Cell Types in Hydroplegia. Int. J. Mol. Sci. 2022, 23, 4745. [Google Scholar] [CrossRef] [PubMed]
- Hua, Q.-L.; Sun, J.-L.; Liu, H.-T.; Bao, R.-R.; Yu, R.-M.; Zhai, J.-Y.; Pan, C.-F.; Wang, Z.-L. Skin-inspired Highly Stretchable and Conformable Matrix Networks for Multifunctional Sensing. Nat. Commun. 2018, 9, 244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laskowska, M.; Nowak, A.; Dulski, M.; Weigl, P.; Blochowicz, T.; Laskowski, L. Spherical Silica Functionalized by 2-Naphthalene Methanol Luminophores as a Phosphorescence Sensor. Int. J. Mol. Sci. 2021, 22, 13289. [Google Scholar] [CrossRef] [PubMed]
- Munteanu, I.-G.; Apetrei, C. Electrochemical Determination of Chlorogenic Acid in Nutraceuticals Using Voltammetric Sensors Based on Screen-Printed Carbon Electrode Modified with Graphene and Gold Nanoparticles. Int. J. Mol. Sci. 2021, 22, 8897. [Google Scholar] [CrossRef]
- Mannsfeld, S.; Tee, B.; Stoltenberg, R.; Chen, C.; Barman, S.; Muir, B.; Sokolov, A.; Reese, C.; Bao, Z.-N. Highly Sensitive Flexible Pressure Sensors with Microstructured Rubber Dielectric Layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Konishi, S.; Hirata, A. Flexible Temperature Sensor Integrated with Soft Pneumatic Microactuators for Functional Microfingers. Sci. Rep. 2019, 9, 15634. [Google Scholar] [CrossRef] [Green Version]
- Jeon, J.; Lee, H.-B.; Bao, Z. Flexible Wireless Temperature Sensors Based on Ni Microparticle-Filled Binary Polymer Composites. Adv. Mater. 2013, 25, 850–855. [Google Scholar] [CrossRef]
- Han, Z.-W.; Liu, L.-P.; Zhang, J.-Q.; Han, Q.-G.; Wang, K.-J.; Song, H.-L.; Wang, Z.; Jiao, Z.-B.; Niu, S.-C.; Ren, L.-Q. High-performance Flexible Strain Sensor with Bio-inspired Crack Arrays. Nanoscale 2018, 10, 15178–15186. [Google Scholar] [CrossRef]
- Guo, H.-Y.; Lan, C.-Y.; Zhou, Z.-F.; Sun, P.; Wei, D.; Li, C. Transparent, Flexible, and Stretchable WS2 Based Humidity Sensors for Electronic Skin. Nanoscale 2017, 9, 6246–6253. [Google Scholar] [CrossRef]
- Ma, L.; Wu, R.; Patil, A.; Zhu, S.; Meng, Z.; Meng, H.; Hou, C.; Zhang, Y.; Liu, Q.; Yu, R.; et al. Full-Textile Wireless Flexible Humidity Sensor for Human Physiological Monitoring. Adv. Funct. Mater. 2019, 29, 1904549. [Google Scholar] [CrossRef]
- Huang, Y.; Fan, X.-Y.; Chen, S.-C.; Zhao, N. Emerging Technologies of Flexible Pressure Sensors: Materials, Modeling, Devices, and Manufacturing. Adv. Funct. Mater. 2019, 29, 1808509. [Google Scholar] [CrossRef]
- Nela, L.; Tang, J.-S.; Cao, Q.; Tulevski, G.; Han, S.-J. Large-Area High-Performance Flexible Pressure Sensor with Carbon Nanotube Active Matrix for Electronic Skin. Nano Lett. 2018, 18, 2054–2059. [Google Scholar] [CrossRef] [PubMed]
- Melzer, M.; Makarov, D.; Calvimontes, A.; Karnaushenko, D.; Baunack, S.; Kaltofen, R.; Mei, Y.; Schmidt, O. Stretchable Magnetoelectronics. Nano Lett. 2011, 11, 2522–2526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chlenova, A.; Lepalovsky, V.; Vas’kovskiy, V.; Svalov, A.; Kurlyandskaya, G. Magnetoimpedance effect in multilayered permalloy structure with different magnetostriction: Small-pressure sensor. AIP Conf. Proc. 2017, 1886, 020005. [Google Scholar]
- Li, B.; Kavaldzhiev, M.; Kosel, J. Flexible Magnetoimpedance Sensor. J. Magn. Magn. Mater. 2015, 378, 499. [Google Scholar] [CrossRef]
- Yao, S.; Zhu, Y. Nanomaterial-Enabled Stretchable Conductors: Strategies, Materials and Devices. Adv. Mater. 2015, 27, 1480–1511. [Google Scholar] [CrossRef]
- Zhao, S.-F.; Li, J.-H.; Cao, D.-X.; Zhang, G.-P.; Li, J.; Li, K.; Yang, Y.; Wang, W.; Jin, Y.-F.; Sun, R.; et al. Recent Advancements in Flexible and Stretchable Electrodes for Electromechanical Sensors: Strategies, Materials, and Features. ACS Appl. Mater. Interfaces 2017, 9, 12147–12164. [Google Scholar] [CrossRef]
- Langley, D.; Giusti, G.; Mayousse, C.; Celle, C.; Bellet, D.; Simonato, J.-P. Flexible Transparent Conductive Materials Based on Silver Nanowire Networks: A Review. Nanotechnology 2013, 24, 452001. [Google Scholar] [CrossRef]
- Geim, A.-K. Graphene: Status and prospects. Science 2009, 324, 1530–1534. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.S.; Zhao, Y.; Jang, H.; Lee, S.Y.; Kim, J.M.; Kim, K.S.; Ahn, J.-H.; Kim, P.; Choi, J.-Y.; Hong, B.H. Large-Scale Pattern Growth of Graphene Films for Stretchable Transparent Electrodes. Nature 2009, 457, 706–710. [Google Scholar] [CrossRef] [PubMed]
- Sekitani, T.; Nakajima, H.; Maeda, H.; Fukushima, T.; Aida, T.; Hata, K.; Someya, T. Stretchable Active-Matrix Organic Light-Emitting Diode Display Using Printable Elastic Conductors. Nat. Mater. 2009, 8, 494–499. [Google Scholar] [CrossRef] [PubMed]
- Sekitani, T.; Noguchi, Y.; Hata, K.; Fukushima, T.; Aida, T.; Someya, T. A Rubberlike Stretchable Active Matrix Using Elastic Conductors. Science 2008, 321, 1468–1472. [Google Scholar] [CrossRef] [Green Version]
- Han, T.; Wang, G. Peroxidase-like Activity of Acetylcholine-Based Colorimetric Detection of Acetylcholinesterase Activity and an Organophosphorus Inhibitor. J. Mater. Chem. B 2019, 7, 2613–2618. [Google Scholar] [CrossRef]
- Huang, W.-P.; Li, J.-H.; Zhao, S.-F.; Han, F.; Zhang, G.-P.; Sun, R.; Wong, C.-P. Highly Electrically Conductive and Stretchable Copper Nanowires-Based Composite for Flexible and Printable Electronics. Compos. Sci. Technol. 2017, 146, 169–176. [Google Scholar] [CrossRef]
- Xu, F.; Wang, X.; Zhu, Y.-T.; Zhu, Y. Wavy Ribbons of Carbon Nanotubes for Stretchable Conductors. Adv. Funct. Mater. 2012, 22, 1279–1283. [Google Scholar] [CrossRef]
- Hu, W.-L.; Wang, R.-R.; Lu, Y.-F.; Pei, Q.-B. An Elastomeric Transparent Composite Electrode Based on Copper Nanowires and Polyurethane. J. Mater. Chem. C 2014, 2, 1298–1305. [Google Scholar] [CrossRef]
- Lee, P.; Ham, J.; Lee, J.; Hong, S.; Han, S.; Suh, Y.D.; Lee, S.E.; Yeo, J.; Lee, S.S.; Lee, D.; et al. Highly Stretchable or Transparent Conductor Fabrication by a Hierarchical Multiscale Hybrid Nanocomposite. Adv. Funct. Mater. 2014, 24, 5671–5678. [Google Scholar] [CrossRef]
- Hu, L.-B.; Wei, Y.; Brochu, P.; Gruner, G.; Pei, Q.-B. Highly Stretchable, Conductive, and Transparent Nanotube Thin Films. Appl. Phys. Lett. 2009, 94, 161108. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, F. Buckling of Aligned Carbon Nanotubes as Stretchable Conductors: A New Manufacturing Strategy. Adv. Mater. 2012, 24, 1073–1077. [Google Scholar] [CrossRef]
- Bowden, N.; Brittain, S.; Evans, A.-G.; Hutchinson, J.W.; Whitesides, G.-M. Spontaneous Formation of Ordered Structures in Thin Films of Metals Supported on an Elastomeric Polymer. Nature 1998, 393, 146–149. [Google Scholar] [CrossRef]
- Shang, Y.-Y.; He, X.-D.; Li, Y.-B.; Zhang, L.-H.; Li, Z.; Ji, C.-Y.; Shi, E.-Z.; Li, P.-X.; Zhu, K.; Peng, Q.-Y.; et al. Super-Stretchable Spring-Like Carbon Nanotube Ropes. Adv. Mater. 2012, 24, 2896–2900. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.-W.; Guan, Q.-F.; Zhu, Z.; Song, L.-T.; Yao, H.-B.; Lei, X.; Yu, S.-Y. Highly Conductive and Stretchable Conductors Fabricated from Bacterial Cellulose. NPG Asia. Mater. 2012, 4, e19. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.-P.; Ren, W.-C.; Gao, L.-B.; Liu, B.-L.; Pei, S.-F.; Cheng, H.-M. Three-Dimensional Flexible and Conductive Interconnected Graphene Networks Grown by Chemical Vapour Deposition. Nat. Mater. 2011, 10, 424–428. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.-J.; Masampu, C.; Rong, J.; Wei, B.-Q.; Jiang, H. Stretchable Supercapacitors Based on Buckled Single-Walled Carbon-Nanotube Macrofilms. Adv. Mater. 2010, 21, 4793–4797. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.; Fang, L.-J.; Huang, X.-Y.; Jiang, P.-K. Three-Dimensional Highly Conductive Graphene–Silver Nanowire Hybrid Foams for Flexible and Stretchable Conductors. ACS Appl. Mater. Interfaces. 2014, 6, 21026–21034. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Hu, L.; Rowell, M.W.; Kong, D.; Cha, J.J.; McDonough, J.R.; Zhu, J.; Yang, Y.; McGehee, M.D.; Cui, Y. Electrospun Metal Nanofiber Webs as High-Performance Transparent Electrode. Nano. Lett. 2010, 10, 4242–4248. [Google Scholar] [CrossRef]
- Zhang, Y.; Sheehan, C.-J.; Zhai, J.; Zou, G.; Luo, H.; Xiong, J.; Zhu, Y.; Jia, Q. Polymer-Embedded Carbon Nanotube Ribbons for Stretchable Conductors. Adv. Mater. 2010, 22, 3027–3031. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, L.; Li, C. Three-Dimensional Porous Stretchable and Conductive Polymer Composites Based on Graphene Network Grown by Chemical Vapour Deposition and PEDOT: PSS Coating. Chem. Commun. 2015, 51, 3169–3172. [Google Scholar] [CrossRef]
- Yu, Y.; Zeng, J.-F.; Chen, C.-J.; Xie, Z.; Guo, R.-S.; Liu, Z.-L.; Zhou, X.-C.; Yang, Y.; Zheng, Z.-J. Composite Materials: Three-Dimensional Compressible and Stretchable Conductive Composites. Adv. Mater. 2014, 26, 666. [Google Scholar] [CrossRef]
- Park, J.; Wang, S.; Li, M.; Ahn, C.-G.; Hyun, J.-K.; Dong, S.-K.; Kim, D.-K.; Rogers, J.-A.; Huang, Y.-G.; Jeon, S.-K. Three-Dimensional Nanonetworks for Giant Stretchability in Dielectrics and Conductors. Nat. Commun. 2012, 3, 916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, M.-T.; Zhang, L.; Duan, S.-S.; Jing, S.-L.; Jiang, H.; Li, C.-Z. Highly Stretchable Conductors Integrated with a Conductive Carbon Nanotube/Graphene Network and 3D Porous Poly(dimethylsiloxane). Adv. Funct. Mater. 2015, 24, 7548–7556. [Google Scholar] [CrossRef]
- Wei, W.; Yang, S.; Zhou, H.; Lieberwirth, I.; Feng, X.-L.; Müllen, K. 3D Graphene Foams Cross-Linked with Pre-Encapsulated Fe3O4 Nanospheres for Enhanced Lithium Storage. Adv. Mater. 2013, 25, 2909–2914. [Google Scholar] [CrossRef]
- Xu, Y.-X.; Sheng, K.-X.; Li, C.; Shi, G.-Q. Self-Assembled Graphene Hydrogel via a One-Step Hydrothermal Process. ACS Nano 2010, 4, 4324–4330. [Google Scholar] [CrossRef] [PubMed]
- Fei, H.; Li, J.-H.; Zhao, S.-F.; Yuan, Z.; Huang, W.-P.; Zhang, G.-P.; Rong, S.; Wong, C.-P. A Crack-based Nickel@Graphene Wrapped Polyurethane Sponge Ternary Hybrid Obtained by Electrodeposition for Highly Sensitive Wearable Strain Sensors. J. Mater. Chem. C 2017, 5, 10167–10175. [Google Scholar]
- Fei, H.; Su, X.-Y.; Huang, M.-Q.; Li, J.-H.; Zhang, Y.; Zhao, S.; Liu, F.; Zhang, B.; Wang, Y.; Zhang, G.; et al. Fabrication of a Flexible and Stretchable Three-Dimensional Conductor Based on Au–Ni@Graphene Coated Polyurethane Sponge by Electroless Plating. J. Mater. Chem. C 2018, 6, 8135–8143. [Google Scholar]
- Herren, B.; Webster, V.; Davidson, E.; Saha, M.-C.; Altan, M.-C.; Liu, Y. PDMS Sponges with Embedded Carbon Nanotubes as Piezoresistive Sensors for Human Motion Detection. Nano Mater. 2021, 11, 1740. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Maximum Compression Deformation | Carbon Nano Tube (CNT) Capacity | Carbohydrate Content | Max ∆R/R0 (%) |
|---|---|---|---|---|
| Sponge | 50.0% | 1.5–3.0% | 70.0% | <90.0% |
| Sponge | 50.0% | 3.0% | 70.0–85.0% | <90.0% |
| Sponge (this paper) | 85.0% | 0% | 0% | 98.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, H.; Li, Y.; Qian, Z.; Ren, L.; Ren, L. A Piezoresistive Sensor with High Sensitivity and Flexibility Based on Porous Sponge. Nanomaterials 2022, 12, 3833. https://doi.org/10.3390/nano12213833
Yuan H, Li Y, Qian Z, Ren L, Ren L. A Piezoresistive Sensor with High Sensitivity and Flexibility Based on Porous Sponge. Nanomaterials. 2022; 12(21):3833. https://doi.org/10.3390/nano12213833
Chicago/Turabian StyleYuan, Hengyi, Yi Li, Zhihui Qian, Lei Ren, and Luquan Ren. 2022. "A Piezoresistive Sensor with High Sensitivity and Flexibility Based on Porous Sponge" Nanomaterials 12, no. 21: 3833. https://doi.org/10.3390/nano12213833