Intelligent Identification of MoS2 Nanostructures with Hyperspectral Imaging by 3D-CNN


 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Growth Mechanism and Surface Morphology of MoS2
2.2. CVD Sample Preparation
2.3. Optical Microscope Image Acquisition
2.4. System Equipment and Procedures
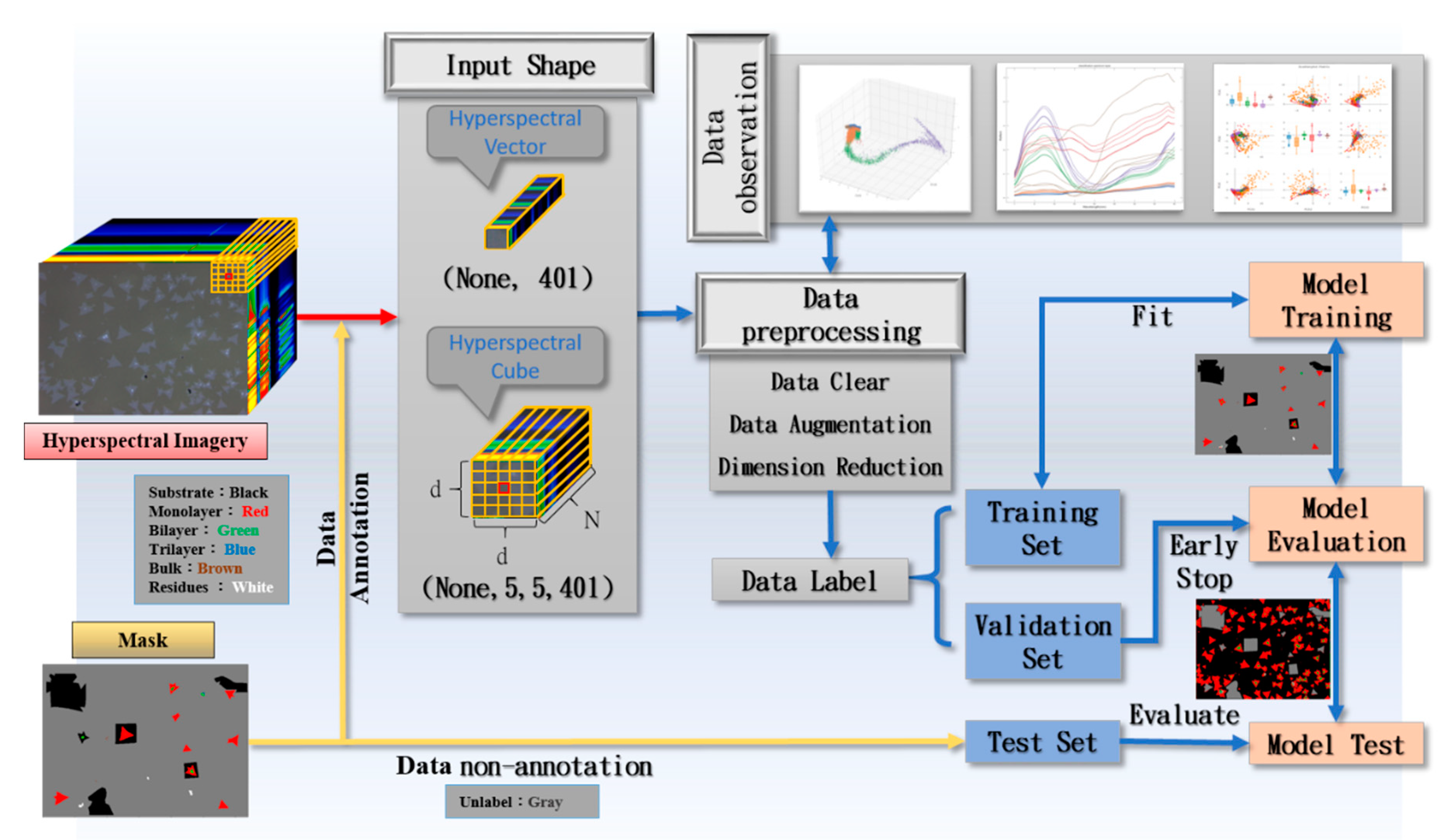
2.5. Tag Analysis and Feature Extraction Workflow
2.6. Visible Hyperspectral Imaging Algorithm
2.7. Data Preprocessing and Partitioning
2.8. Software and Hardware
3. Results
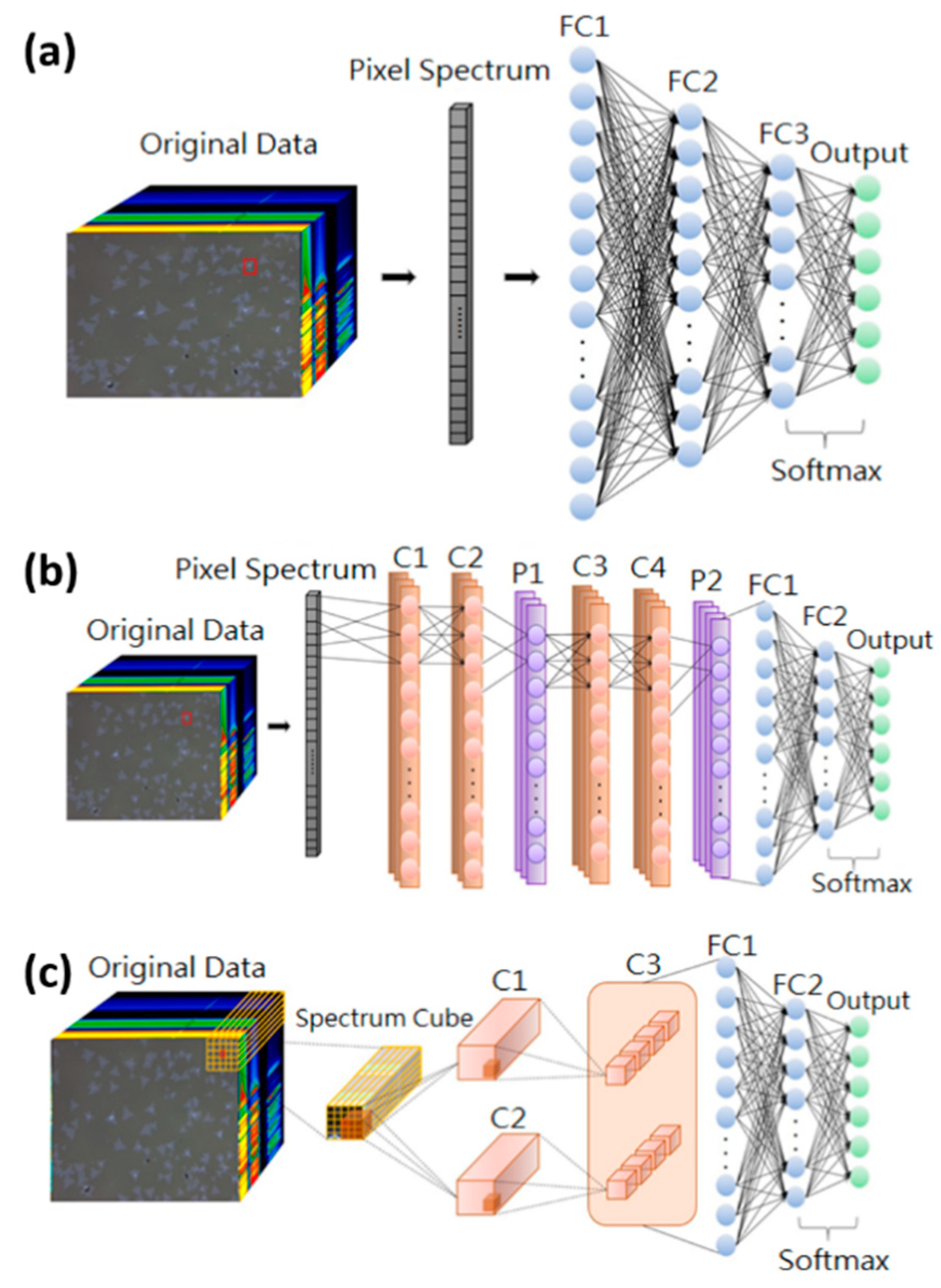
3.1. Model Framework for Deep Learning
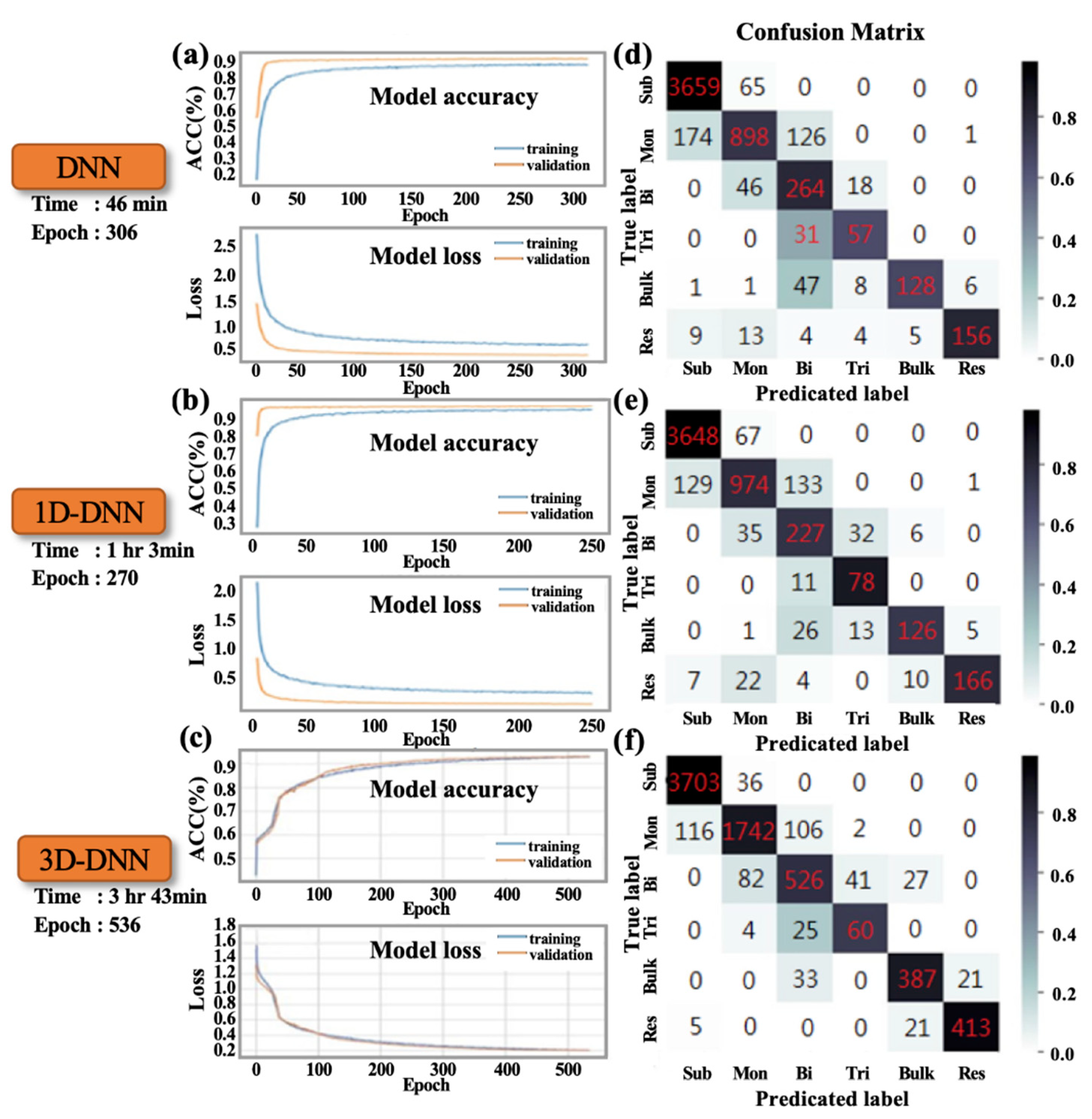
3.2. Training Results under Three Deep Learning Models with 10× Magnification
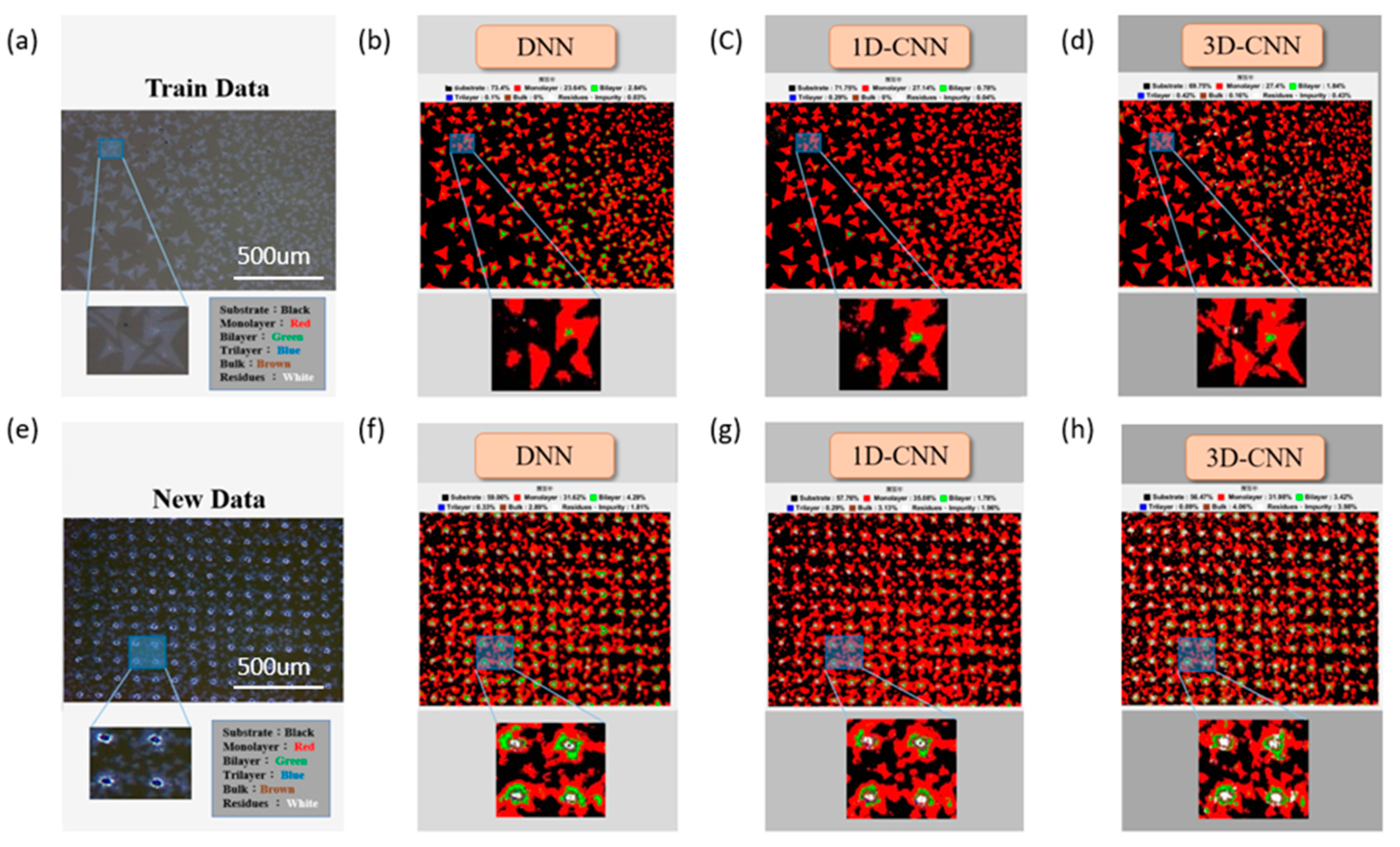
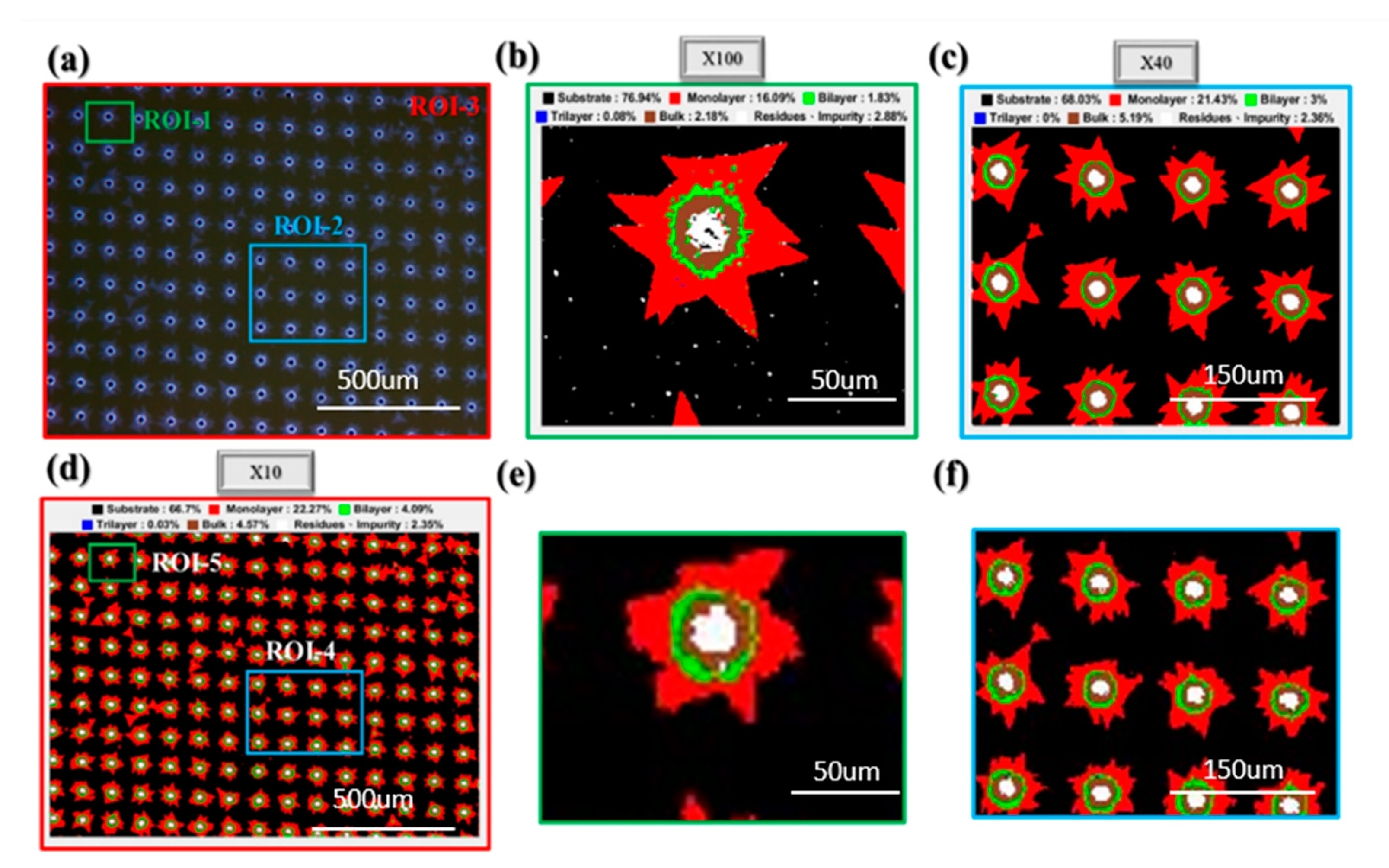
3.3. Prediction Results at 10× Magnification
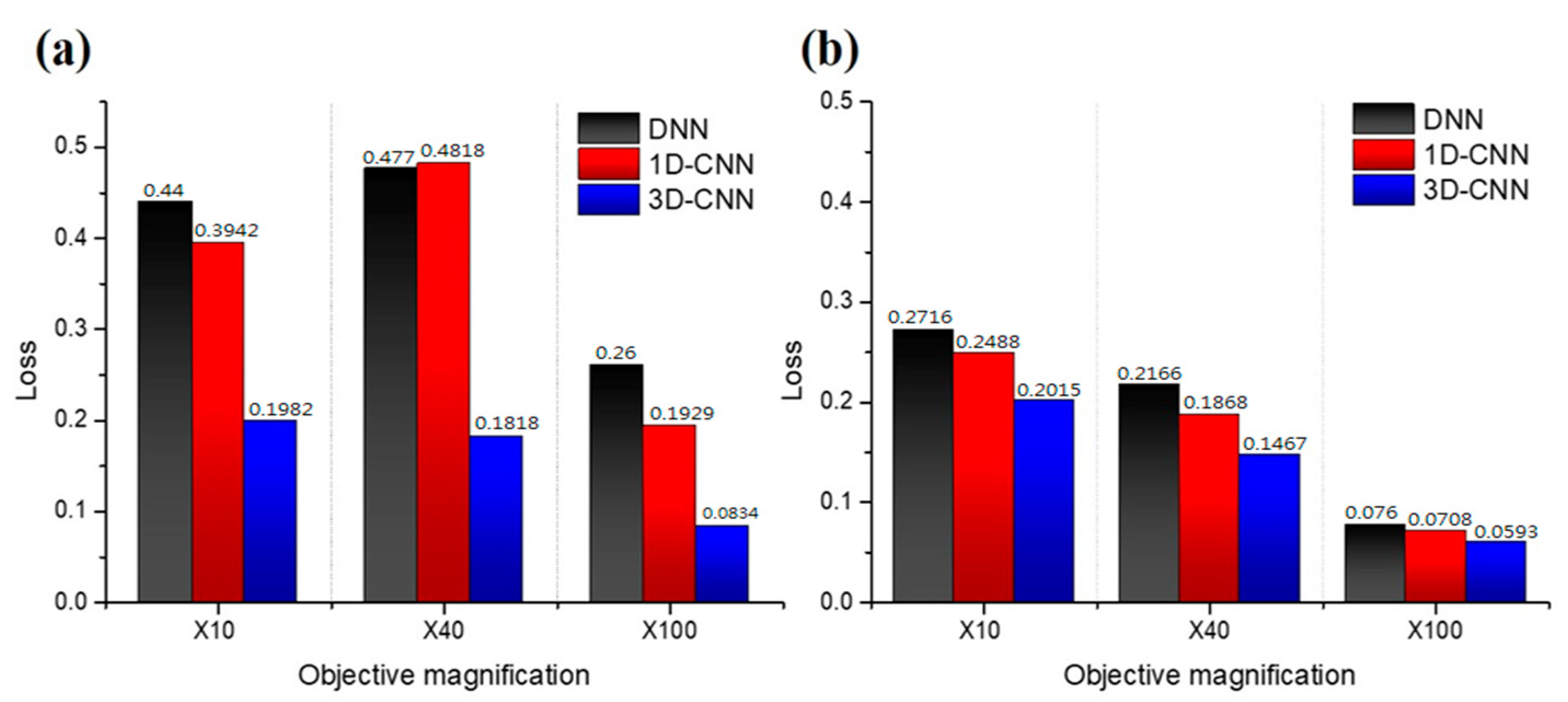
3.4. Differences in Models at Three Magnification Rates
3.5. Instrument Measurement Verification
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Geim, A.K.; Novoselov, K.S. The rise of graphene. In Nanoscience and Technology: A Collection of Reviews from Nature Journals; World Scientific: Singapore, 2010; pp. 11–19. [Google Scholar]
- Sarma, S.D.; Adam, S.; Hwang, E.; Rossi, E. Electronic transport in two-dimensional graphene. Rev. Mod. Phys. 2011, 83, 407. [Google Scholar] [CrossRef] [Green Version]
- Lin, X.; Su, L.; Si, Z.; Zhang, Y.; Bournel, A.; Zhang, Y.; Klein, J.-O.; Fert, A.; Zhao, W. Gate-driven pure spin current in graphene. Phys. Rev. Appl. 2017, 8, 034006. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, J.; Tong, X.; Yu, P.; Xu, J.Y.; Wu, J.; Wang, Z.M.; Lou, J.; Chueh, Y.L. A Critical Review on Enhancement of Photocatalytic Hydrogen Production by Molybdenum Disulfide: From Growth to Interfacial Activities. Small 2019, 15, 1900578. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.; Wang, H.; Luo, S.; Wang, C.; Zhang, S.; Guo, S. Cut Flexible Multifunctional Electronics Using MoS2 Nanosheet. Nanomaterials 2019, 9, 922. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wan, Q.; Yang, N. Recent Advances of Porous Graphene: Synthesis, Functionalization, and Electrochemical Applications. Small 2019, 15, 1903780. [Google Scholar] [CrossRef]
- Radisavljevic, B.; Radenovic, A.; Brivio, J.; Giacometti, V.; Kis, A. Single-layer MoS2 transistors. Nat. Nanotechnol. 2011, 6, 147. [Google Scholar] [CrossRef]
- Han, T.; Liu, H.; Wang, S.; Chen, S.; Xie, H.; Yang, K. Probing the field-effect transistor with monolayer MoS2 prepared by APCVD. Nanomaterials 2019, 9, 1209. [Google Scholar] [CrossRef] [Green Version]
- Roh, J.; Ryu, J.H.; Baek, G.W.; Jung, H.; Seo, S.G.; An, K.; Jeong, B.G.; Lee, D.C.; Hong, B.H.; Bae, W.K. Threshold voltage control of multilayered MoS2 field-effect transistors via octadecyltrichlorosilane and their applications to active matrixed quantum dot displays driven by enhancement-mode logic gates. Small 2019, 15, 1803852. [Google Scholar] [CrossRef]
- Yang, K.; Liu, H.; Wang, S.; Li, W.; Han, T. A horizontal-gate monolayer MoS2 transistor based on image force barrier reduction. Nanomaterials 2019, 9, 1245. [Google Scholar] [CrossRef] [Green Version]
- Choi, M.S.; Lee, G.-H.; Yu, Y.-J.; Lee, D.-Y.; Lee, S.H.; Kim, P.; Hone, J.; Yoo, W.J. Controlled charge trapping by molybdenum disulphide and graphene in ultrathin heterostructured memory devices. Nat. Commun. 2013, 4, 1–7. [Google Scholar]
- Lu, G.Z.; Wu, M.J.; Lin, T.N.; Chang, C.Y.; Lin, W.L.; Chen, Y.T.; Hou, C.F.; Cheng, H.J.; Lin, T.Y.; Shen, J.L. Electrically pumped white-light-emitting diodes based on histidine-doped MoS2 quantum dots. Small 2019, 15, 1901908. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.-H.; Lee, G.-H.; Van Der Zande, A.M.; Chen, W.; Li, Y.; Han, M.; Cui, X.; Arefe, G.; Nuckolls, C.; Heinz, T.F. Atomically thin p–n junctions with van der Waals heterointerfaces. Nat. Nanotechnol. 2014, 9, 676. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sarkar, D.; Liu, W.; Xie, X.; Anselmo, A.C.; Mitragotri, S.; Banerjee, K. MoS2 field-effect transistor for next-generation label-free biosensors. ACS Nano 2014, 8, 3992–4003. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Li, N.; Yu, H.; Wei, Z.; Liao, M.; Chen, P.; Wang, S.; Shi, D.; Sun, Q.; Zhang, G. Highly sensitive MoS2 humidity sensors array for noncontact sensation. Adv. Mater. 2017, 29, 1702076. [Google Scholar] [CrossRef]
- Park, Y.J.; Sharma, B.K.; Shinde, S.M.; Kim, M.-S.; Jang, B.; Kim, J.-H.; Ahn, J.-H. All MoS2-based large area, skin-attachable active-matrix tactile sensor. ACS Nano 2019, 13, 3023–3030. [Google Scholar] [CrossRef]
- Shin, M.; Yoon, J.; Yi, C.; Lee, T.; Choi, J.-W. Flexible HIV-1 biosensor based on the Au/MoS2 nanoparticles/Au nanolayer on the PET substrate. Nanomaterials 2019, 9, 1076. [Google Scholar] [CrossRef] [Green Version]
- Yadav, V.; Roy, S.; Singh, P.; Khan, Z.; Jaiswal, A. 2D MoS2-based nanomaterials for therapeutic, bioimaging, and biosensing applications. Small 2019, 15, 1803706. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Yang, S.; Pineda-Gómez, R.; Ibarlucea, B.; Ma, J.; Lohe, M.R.; Akbar, T.F.; Baraban, L.; Cuniberti, G.; Feng, X. Electrochemically exfoliated high-quality 2H-MoS2 for multiflake thin film flexible biosensors. Small 2019, 15, 1901265. [Google Scholar] [CrossRef]
- Tu, Q.; Lange, B.R.; Parlak, Z.; Lopes, J.M.J.; Blum, V.; Zauscher, S. Quantitative subsurface atomic structure fingerprint for 2D materials and heterostructures by first-principles-calibrated contact-resonance atomic force microscopy. ACS Nano 2016, 10, 6491–6500. [Google Scholar] [CrossRef]
- Wastl, D.S.; Weymouth, A.J.; Giessibl, F.J. Atomically resolved graphitic surfaces in air by atomic force microscopy. ACS Nano 2014, 8, 5233–5239. [Google Scholar] [CrossRef]
- Zhao, W.; Xia, B.; Lin, L.; Xiao, X.; Liu, P.; Lin, X.; Peng, H.; Zhu, Y.; Yu, R.; Lei, P. Low-energy transmission electron diffraction and imaging of large-area graphene. Sci. Adv. 2017, 3, e1603231. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meyer, J.C.; Geim, A.K.; Katsnelson, M.I.; Novoselov, K.S.; Booth, T.J.; Roth, S. The structure of suspended graphene sheets. Nature 2007, 446, 60–63. [Google Scholar] [CrossRef] [PubMed]
- Nolen, C.M.; Denina, G.; Teweldebrhan, D.; Bhanu, B.; Balandin, A.A. High-throughput large-area automated identification and quality control of graphene and few-layer graphene films. ACS Nano 2011, 5, 914–922. [Google Scholar] [CrossRef] [PubMed]
- Konstantopoulos, G.; Koumoulos, E.P.; Charitidis, C.A. Testing novel portland cement formulations with carbon nanotubes and intrinsic properties revelation: Nanoindentation analysis with machine learning on microstructure identification. Nanomaterials 2020, 10, 645. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hong, S.; Nomura, K.-I.; Krishnamoorthy, A.; Rajak, P.; Sheng, C.; Kalia, R.K.; Nakano, A.; Vashishta, P. Defect healing in layered materials: A machine learning-assisted characterization of MoS2 crystal phases. J. Phys. Chem. Lett. 2019, 10, 2739–2744. [Google Scholar] [CrossRef]
- Masubuchi, S.; Watanabe, E.; Seo, Y.; Okazaki, S.; Sasagawa, T.; Watanabe, K.; Taniguchi, T.; Machida, T. Deep-learning-based image segmentation integrated with optical microscopy for automatically searching for two-dimensional materials. NPJ 2D Mater. Appl. 2020, 4, 1–9. [Google Scholar] [CrossRef]
- Yang, J.; Yao, H. Automated identification and characterization of two-dimensional materials via machine learning-based processing of optical microscope images. Extrem. Mech. Lett. 2020, 39, 100771. [Google Scholar] [CrossRef]
- Li, Y.; Kong, Y.; Peng, J.; Yu, C.; Li, Z.; Li, P.; Liu, Y.; Gao, C.-F.; Wu, R. Rapid identification of two-dimensional materials via machine learning assisted optic microscopy. J. Mater. 2019, 5, 413–421. [Google Scholar] [CrossRef]
- Masubuchi, S.; Machida, T. Classifying optical microscope images of exfoliated graphene flakes by data-driven machine learning. NPJ 2D Mater. Appl. 2019, 3, 1–7. [Google Scholar] [CrossRef]
- Lin, X.; Si, Z.; Fu, W.; Yang, J.; Guo, S.; Cao, Y.; Zhang, J.; Wang, X.; Liu, P.; Jiang, K. Intelligent identification of two-dimensional nanostructures by machine-learning optical microscopy. Nano Res. 2018, 11, 6316–6324. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Luo, X.; Li, H.; Zhang, J.; Araujo, P.T.; Gan, C.K.; Wu, J.; Zhang, H.; Quek, S.Y.; Dresselhaus, M.S. Interlayer breathing and shear modes in few-trilayer MoS2 and WSe2. Nano Lett. 2013, 13, 1007–1015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.; Wu, J.; Yin, Z.; Zhang, H. Preparation and applications of mechanically exfoliated single-layer and multilayer MoS2 and WSe2 nanosheets. Acc. Chem. Res. 2014, 47, 1067–1075. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Lu, G.; Yin, Z.; He, Q.; Li, H.; Zhang, Q.; Zhang, H. Optical identification of single-and few-layer MoS2 sheets. Small 2012, 8, 682–686. [Google Scholar] [CrossRef] [PubMed]
- Najmaei, S.; Liu, Z.; Zhou, W.; Zou, X.; Shi, G.; Lei, S.; Yakobson, B.I.; Idrobo, J.-C.; Ajayan, P.M.; Lou, J. Vapour phase growth and grain boundary structure of molybdenum disulphide atomic layers. Nat. Mater. 2013, 12, 754–759. [Google Scholar] [CrossRef]
- Van Der Zande, A.M.; Huang, P.Y.; Chenet, D.A.; Berkelbach, T.C.; You, Y.; Lee, G.-H.; Heinz, T.F.; Reichman, D.R.; Muller, D.A.; Hone, J.C. Grains and grain boundaries in highly crystalline monolayer molybdenum disulphide. Nat. Mater. 2013, 12, 554–561. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.H.; Zhang, X.Q.; Zhang, W.; Chang, M.T.; Lin, C.T.; Chang, K.D.; Yu, Y.C.; Wang, J.T.W.; Chang, C.S.; Li, L.J. Synthesis of large-area MoS2 atomic layers with chemical vapor deposition. Adv. Mater. 2012, 24, 2320–2325. [Google Scholar] [CrossRef] [Green Version]
- Jeon, J.; Jang, S.K.; Jeon, S.M.; Yoo, G.; Jang, Y.H.; Park, J.-H.; Lee, S. Layer-controlled CVD growth of large-area two-dimensional MoS2 films. Nanoscale 2015, 7, 1688–1695. [Google Scholar] [CrossRef]
- Dumcenco, D.; Ovchinnikov, D.; Marinov, K.; Lazic, P.; Gibertini, M.; Marzari, N.; Sanchez, O.L.; Kung, Y.-C.; Krasnozhon, D.; Chen, M.-W. Large-area epitaxial monolayer MoS2. ACS Nano 2015, 9, 4611–4620. [Google Scholar] [CrossRef]
- Yu, Y.; Li, C.; Liu, Y.; Su, L.; Zhang, Y.; Cao, L. Controlled scalable synthesis of uniform, high-quality monolayer and few-layer MoS2 films. Sci. Rep. 2013, 3, 1866. [Google Scholar] [CrossRef]
- Wang, S.; Rong, Y.; Fan, Y.; Pacios, M.; Bhaskaran, H.; He, K.; Warner, J.H. Shape evolution of monolayer MoS2 crystals grown by chemical vapor deposition. Chem. Mater. 2014, 26, 6371–6379. [Google Scholar] [CrossRef]
- Wang, L.; Chen, F.; Ji, X. Shape consistency of MoS2 flakes grown using chemical vapor deposition. Appl. Phys. Express 2017, 10, 065201. [Google Scholar] [CrossRef]
- Zheng, W.; Qiu, Y.; Feng, W.; Chen, J.; Yang, H.; Wu, S.; Jia, D.; Zhou, Y.; Hu, P. Controlled growth of six-point stars MoS2 by chemical vapor deposition and its shape evolution mechanism. Nanotechnology 2017, 28, 395601. [Google Scholar] [CrossRef] [PubMed]
- Zhou, D.; Shu, H.; Hu, C.; Jiang, L.; Liang, P.; Chen, X. Unveiling the growth mechanism of MoS2 with chemical vapor deposition: From two-dimensional planar nucleation to self-seeding nucleation. Cryst. Growth Des. 2018, 18, 1012–1019. [Google Scholar] [CrossRef]
- Zhu, D.; Shu, H.; Jiang, F.; Lv, D.; Asokan, V.; Omar, O.; Yuan, J.; Zhang, Z.; Jin, C. Capture the growth kinetics of CVD growth of two-dimensional MoS2. NPJ 2D Mater. Appl. 2017, 1, 1–8. [Google Scholar] [CrossRef]
- Sun, D.; Nguyen, A.E.; Barroso, D.; Zhang, X.; Preciado, E.; Bobek, S.; Klee, V.; Mann, J.; Bartels, L. Chemical vapor deposition growth of a periodic array of single-layer MoS2 islands via lithographic patterning of an SiO2/Si substrate. 2D Mater. 2015, 2, 045014. [Google Scholar] [CrossRef]
- Li, Y.; Hao, S.; DiStefano, J.G.; Murthy, A.A.; Hanson, E.D.; Xu, Y.; Wolverton, C.; Chen, X.; Dravid, V.P. Site-specific positioning and patterning of MoS2 monolayers: The role of Au seeding. ACS Nano 2018, 12, 8970–8976. [Google Scholar] [CrossRef]
- Han, G.H.; Kybert, N.J.; Naylor, C.H.; Lee, B.S.; Ping, J.; Park, J.H.; Kang, J.; Lee, S.Y.; Lee, Y.H.; Agarwal, R. Seeded growth of highly crystalline molybdenum disulphide monolayers at controlled locations. Nat. Commun. 2015, 6, 6128. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Kang, K.; Chen, S.; Du, R.; Yang, E.-H. Location-specific growth and transfer of arrayed MoS2 monolayers with controllable size. 2D Materials 2017, 4, 025093. [Google Scholar] [CrossRef]
- Lee, C.; Yan, H.; Brus, L.E.; Heinz, T.F.; Hone, J.; Ryu, S. Anomalous lattice vibrations of single-and few-layer MoS2. ACS Nano 2010, 4, 2695–2700. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Zhang, Q.; Yap, C.C.R.; Tay, B.K.; Edwin, T.H.T.; Olivier, A.; Baillargeat, D. From bulk to monolayer MoS2: Evolution of Raman scattering. Adv. Funct. Mater. 2012, 22, 1385–1390. [Google Scholar] [CrossRef]
- Lei, S.; Ge, L.; Najmaei, S.; George, A.; Kappera, R.; Lou, J.; Chhowalla, M.; Yamaguchi, H.; Gupta, G.; Vajtai, R. Evolution of the electronic band structure and efficient photo-detection in atomic layers of InSe. ACS Nano 2014, 8, 1263–1272. [Google Scholar] [CrossRef] [PubMed]
- Ye, G.; Gong, Y.; Lin, J.; Li, B.; He, Y.; Pantelides, S.T.; Zhou, W.; Vajtai, R.; Ajayan, P.M. Defects engineered monolayer MoS2 for improved hydrogen evolution reaction. NanoLett. 2016, 16, 1097–1103. [Google Scholar] [CrossRef] [PubMed]
- Han, T.; Liu, H.; Wang, S.; Chen, S.; Li, W.; Yang, X.; Cai, M.; Yang, K. Probing the optical properties of MoS2 on SiO2/Si and sapphire substrates. Nanomaterials 2019, 9, 740. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tran, D.; Bourdev, L.; Fergus, R.; Torresani, L.; Paluri, M. Learning spatiotemporal features with 3d convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Araucano Park, Las Condes, Chille, 11–18 December 2015; pp. 4489–4497. [Google Scholar]
- Wang, Z.; Hu, G.; Yao, S. Decomposition mixed pixel of remote sensing image based on tray neural network model. In Proceedings of the International Symposium on Intelligence Computation and Applications, Wuhan, China, 21–23 September 2007; pp. 305–309. [Google Scholar]
- Foschi, P.G. A geometric approach to a mixed pixel problem: Detecting subpixel woody vegetation. Remote Sens. Environ. 1994, 50, 317–327. [Google Scholar] [CrossRef]
- Lin, Z.; Chen, Y.; Zhao, X.; Wang, G. Spectral-spatial classification of hyperspectral image using autoencoders. In Proceedings of the 9th International Conference on Information, Communications & Signal Processing, Tainan, Taiwan, 10–13 December 2013; pp. 1–5. [Google Scholar]
- Chen, Y.; Jiang, H.; Li, C.; Jia, X.; Ghamisi, P. Deep feature extraction and classification of hyperspectral images based on convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6232–6251. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Jia, S. Three-dimensional Gabor wavelets for pixel-based hyperspectral imagery classification. IEEE Trans. Geosci. Remote Sens. 2011, 49, 5039–5046. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Li, Y.; Zhang, H.; Shen, Q. Spectral–spatial classification of hyperspectral imagery with 3D convolutional neural network. Remote Sens. 2017, 9, 67. [Google Scholar] [CrossRef] [Green Version]
- Evennett, P. Kohler illumination: A simple interpretation. Proce. R. Microsc. Soc. 1983, 28, 10–13. [Google Scholar]
- Attota, R.K. Step beyond Kohler illumination analysis for far-field quantitative imaging: Angular illumination asymmetry (ANILAS) maps. Opt. Express 2016, 24, 22616–22627. [Google Scholar] [CrossRef]
- Attota, R.; Silver, R. Optical microscope angular illumination analysis. Opt. Express 2012, 20, 6693–6702. [Google Scholar] [CrossRef] [PubMed]
- KaiáLee, M. Large-area few-layered graphene film determination by multispectral imaging microscopy. Nanoscale 2015, 7, 9033–9039. [Google Scholar]
- Chen, J.; Wei, Q. Phase transformation of molybdenum trioxide to molybdenum dioxide: An in-situ transmission electron microscopy investigation. Int. J. Appl. Ceram. Technol. 2017, 14, 1020–1025. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.H.; Kalantar-Zadeh, K.; Kis, A.; Coleman, J.N.; Strano, M.S. Electronics and optoelectronics of two-dimensional transition metal dichalcogenides. Nat. Nanotechnol. 2012, 7, 699. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Rivenson, Y.; Jin, Y.; Wei, Z.; Gao, R.; Günaydın, H.; Bentolila, L.A.; Kural, C.; Ozcan, A. Deep learning enables cross-modality super-resolution in fluorescence microscopy. Nat. Methods 2019, 16, 103–110. [Google Scholar] [CrossRef]
- Rivenson, Y.; Ceylan Koydemir, H.; Wang, H.; Wei, Z.; Ren, Z.; Günaydın, H.; Zhang, Y.; Gorocs, Z.; Liang, K.; Tseng, D. Deep learning enhanced mobile-phone microscopy. ACS Photonics 2018, 5, 2354–2364. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Final Accuracy (Validation Data) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| DNN | 1D-CNN | 3D-CNN | |||||||
| Precision | Recall | F1-Score | Precision | Recall | F1-Score | Precision | Recall | F1-Score | |
| Substrate | 0.9521 | 0.9825 | 0.9671 | 0.9641 | 0.9820 | 0.9729 | 0.9684 | 0.9904 | 0.9792 |
| Monolayer | 0.8778 | 0.7490 | 0.8083 | 0.8863 | 0.7874 | 0.8339 | 0.9345 | 0.8861 | 0.9097 |
| Bilayer | 0.5593 | 0.8049 | 0.6600 | 0.5661 | 0.7567 | 0.6476 | 0.7623 | 0.7781 | 0.7701 |
| Tri-layer | 0.6552 | 0.6477 | 0.6514 | 0.6341 | 0.8764 | 0.7358 | 0.6504 | 0.7339 | 0.6897 |
| Bulk | 0.9624 | 0.6702 | 0.7901 | 0.8873 | 0.7368 | 0.8051 | 0.8897 | 0.8776 | 0.8836 |
| Residues | 0.9571 | 0.8168 | 0.8814 | 0.9651 | 0.7943 | 0.8714 | 0.9516 | 0.9408 | 0.9462 |
| micro average | 0.9023 | 0.9023 | 0.9023 | 0.9123 | 0.9123 | 0.9123 | 0.9296 | 0.9296 | 0.9296 |
| macro average | 0.8273 | 0.7785 | 0.7930 | 0.8172 | 0.8223 | 0.8111 | 0.8595 | 0.8678 | 0.8631 |
| weighted average | 0.9100 | 0.9023 | 0.9026 | 0.9190 | 0.9123 | 0.9134 | 0.9300 | 0.9296 | 0.9295 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, K.-C.; Lu, M.-Y.; Nguyen, H.T.; Feng, S.-W.; Artemkina, S.B.; Fedorov, V.E.; Wang, H.-C. Intelligent Identification of MoS2 Nanostructures with Hyperspectral Imaging by 3D-CNN. Nanomaterials 2020, 10, 1161. https://doi.org/10.3390/nano10061161
Li K-C, Lu M-Y, Nguyen HT, Feng S-W, Artemkina SB, Fedorov VE, Wang H-C. Intelligent Identification of MoS2 Nanostructures with Hyperspectral Imaging by 3D-CNN. Nanomaterials. 2020; 10(6):1161. https://doi.org/10.3390/nano10061161
Chicago/Turabian StyleLi, Kai-Chun, Ming-Yen Lu, Hong Thai Nguyen, Shih-Wei Feng, Sofya B. Artemkina, Vladimir E. Fedorov, and Hsiang-Chen Wang. 2020. "Intelligent Identification of MoS2 Nanostructures with Hyperspectral Imaging by 3D-CNN" Nanomaterials 10, no. 6: 1161. https://doi.org/10.3390/nano10061161