1. Introduction
Forests contribute positively to people’s daily lives worldwide by being a source of food, medicines, and fuel. They also protect the world’s watersheds, maintain soil structure, and function as carbon stores [
1]. Since forests are the dominant plant biomass source, 50% of which comprises carbon, they play a critical role in the carbon cycle [
2]. Forests are also important for aesthetic, educational, spiritual, and recreational reasons [
3]. Establishing and monitoring forests also significantly contributes to the United Nations (UN) Sustainable Development Goal (SDG) 13 on climate action.
Forest monitoring and conservation are needed to help sustain these benefits [
3]. Forest monitoring involves measuring and recording tree-level biophysical parameters and stand-level attributes in a forest inventory. Forest inventories are the primary information sources used in forest management and for forestry policy formulation [
4,
5,
6,
7,
8]. Total tree height (TH) and diameter at breast height (DBH) are the two most common tree attributes in forest inventories [
9]. From these two, other attributes such as above-ground biomass (AGB), timber volume, and basal area can be derived [
6,
9,
10,
11]. Crown diameter (CD) and crop height are usually of interest in precision agriculture [
12]. Comprehensive forest monitoring requires a combination of remote sensing techniques, such as the use of satellite imagery as well as field data collection at the plot level. Remote sensing is useful for forest monitoring at scale, e.g., forest cover estimation. At the same time, field data collection gives more granular data, such as trunk diameters, tree heights, and basal area, from which biomass and carbon stocks are calculated. Satellite imagery has been used to estimate forest biomass as forests are critical to efforts to reduce carbon emissions [
13,
14]. Unfortunately, satellite data often result in unreliable forest biomass estimates and can overestimate above-ground biomass by up to an order of magnitude [
15].
Remote sensing is widely applied in forest monitoring in many countries globally [
16,
17]. For example, the Global Forest Watch maintains a near-real-time online system on global forest cover, with its data sourced mainly through remote sensing approaches [
18]. Despite the widespread adoption of remote sensing in forest monitoring, certain geographical regions are lagging in its uptake, particularly developing nations [
1,
3,
6,
7,
17]. To address this, experts suggest leveraging emerging technologies, noting that countries with robust monitoring systems, such as Norway, Finland, and Sweden, have usually been early adopters of new forest inventory technology [
17,
19]. The calibration of empirical remote sensing models with plot-level ground truth measurements is essential, further underscoring the need for improved speed and efficiency in these measurements [
17,
20]. Since the remote sensing approach lacks the granularity found in national forest inventory data, efforts to bridge this gap are crucial for comprehensive and accurate forest monitoring.
National forest inventories (NFIs) provide high-quality data on national forest resources with a high degree of accuracy and detail. Therefore, many countries regard them as the best sources of information about their forest sectors [
5]. Norway, Sweden, and Finland lead the way with the oldest and most robust NFIs, and they have maintained robust forest monitoring systems [
5,
7,
17]. One widely adopted practice in forest inventory is the use of sample plots for collecting plot-level attributes [
11,
17,
21,
22]. Plot-level measurements collected from sample plots lend themselves to application in statistical estimators used in NFIs and in calibrating empirical and machine learning prediction models used in remote sensing tools [
17]. This helps improve the accuracy of remote sensing approaches, which, although very suitable in situations where scale is a primary consideration [
3,
17,
20], are known to fall short in measuring under-canopy attributes [
16,
17,
20]. As such, field surveys will continue to be a necessary component of forest inventory surveys for the foreseeable future [
20]. Accurate forest inventory data are required to compute accurate biomass and carbon stock data.
A thorough knowledge of carbon stock information is critical in initiating and sustaining plans for climate change mitigation, such as under the REDD+ framework and in laying strategies for bioenergy production [
23,
24,
25]. This information is usually missing or grossly inaccurate in many developing countries owing to the unavailability of reliable forest inventory data [
3,
7]. Some studies that have been conducted in Kenya to estimate the above-ground biomass (AGB) stocks are not up to date, and the result is that detailed, complete, and rigorous assessments of AGB stocks are not easy to find [
25,
26]. These studies also show disconcerting planetary health challenges, such as a decline in forest cover and biodiversity loss across various regions [
27,
28,
29,
30,
31,
32], mainly due to increasing population pressure and demand for agricultural land that has led to deforestation [
29,
30,
33,
34]. The decreasing forest cover has decimated the amount of AGB and carbon stocks in the country [
25,
26,
35]. Therefore, finding the best strategies for enhancing forest conservation and monitoring is imperative.
One of the strategies for enhancing conservation is the involvement of forest-adjacent communities in decision making and planning. This has been shown to increase the sense of ownership over forest resources, thereby fostering a stronger commitment to conservation [
36,
37,
38,
39]. The forest management approach significantly shapes the availability, access, and utilisation of forest products and the extent of community engagement in conservation efforts [
36]. Notably, the involvement of community forest associations in conservation contributes to a heightened perception of the importance of forest ecosystems [
36,
39]. Moreover, communities allowed to access and utilise forest products demonstrate increased participation in conservation initiatives [
36,
37]. The continued co-management of forest resources shared between the government and community organisations is a highly recommended sustainable management strategy [
36,
40,
41]. Another sustainable practice is revegetation using native species instead of exotic ones due to its effectiveness in preventing soil degradation and hydrological changes, thus presenting a synergistic approach to forest technology [
42].
Several studies on land cover changes in various parts of Kenya have observed an initial increase in forest cover from 1995 to 2001 due to government policy. However, after 2001, there was a steady decline in forest cover. To achieve and maintain the required 10% forest cover as per constitutional and UN requirements, researchers recommend adequate and consistent afforestation and reforestation efforts [
30,
31,
32,
33,
34,
37,
39]. Acting upon these recommendations, Kenya’s parliament passed the Forest Conservation and Management Act in 2016, and the result has been an increase in forest cover [
25,
30,
31,
37,
43]. The country’s national strategy includes enhancing forest resource assessment through a comprehensive national forest inventory, an endeavour which requires capacity building for remote sensing surveys and field data collection [
21,
30,
31,
39,
40,
43,
44]. The responsibility for realising this lies with the Kenya Forest Service, Kenya Forestry Research Institute, and universities [
43]. Given Kenya’s ambitious objective of increasing its forest cover to 30% by 2032, the need to closely monitor and assess the growth of these young stands has never been more apparent. This study describes a forest inventory exercise carried out in Kenya using a low-cost, non-contact approach.
Forest inventories often involve complex variables that require significant effort, expertise, and subjective estimates from field staff [
10]. Researchers have explored non-contact methods that utilise digital image and point cloud processing to overcome these challenges. Prominent techniques include structure from motion (SfM), laser scanning, and simultaneous localisation and mapping (SLAM). However, these methods are typically slow, expensive, and computationally intensive [
45]. Ideal measurement techniques should be fast, accurate, practical, and cost-effective. SfM reconstructs 3D scenes from a series of images using multiple-view geometry principles [
9,
46,
47,
48,
49,
50]. Nevertheless, its measurement accuracy decreases with distance [
12,
46,
47,
48,
51]. Laser scanning with LIDAR cameras is a popular remote sensing tool in forestry due to its high precision [
52] and has been applied in some forest inventory studies [
52,
53,
54,
55,
56,
57,
58,
59,
60]. Although laser scanning is widely used in forest inventory studies, the expensive cost of LiDAR cameras hinders broader adoption [
50,
57,
58,
59,
60,
61]. Although less commonly applied in tree inventory, SLAM has been used in some studies [
62,
63].
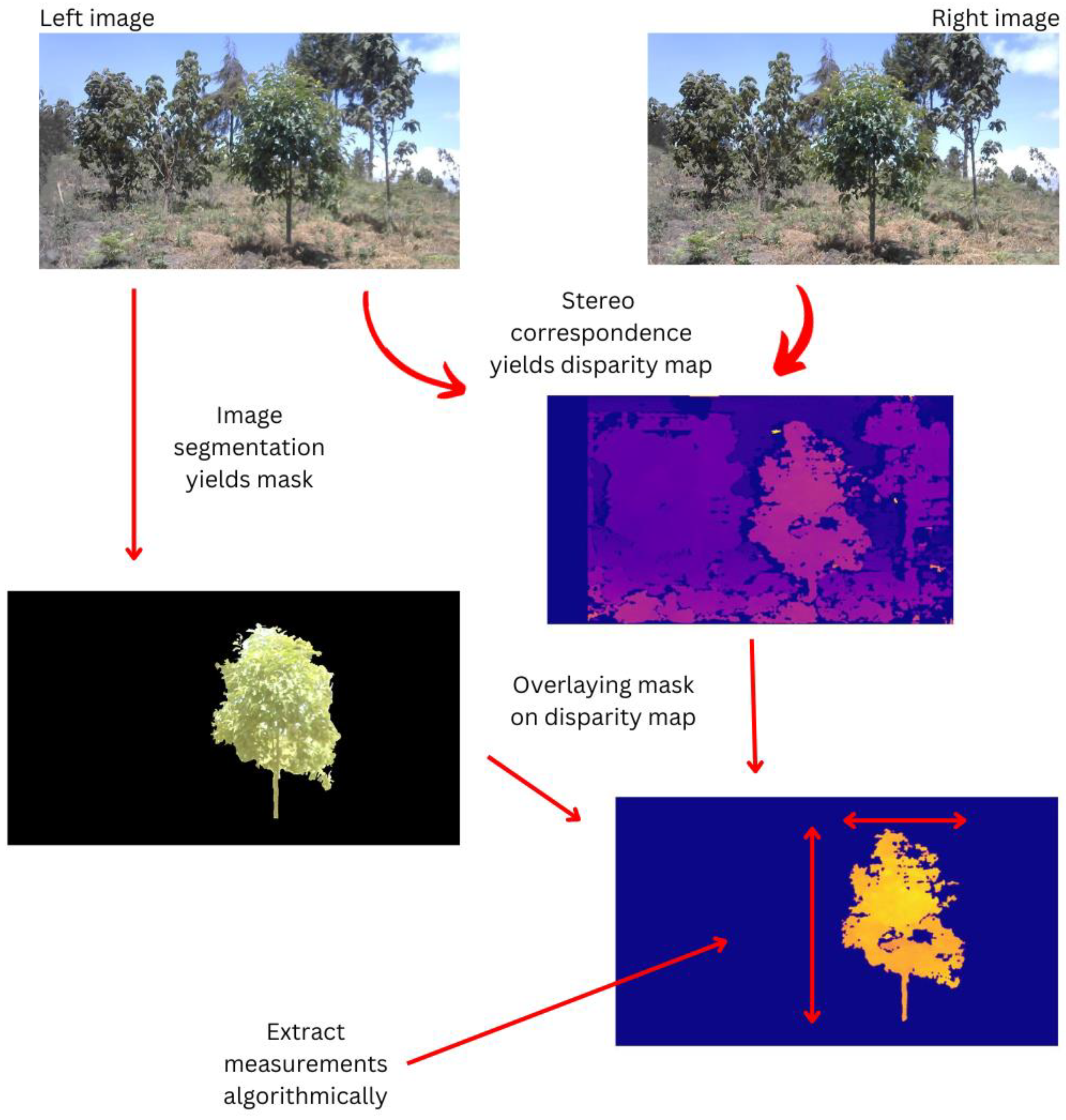
One attractive method of non-contact tree inventory that provides an alternative to the aforementioned techniques is stereoscopic photogrammetry. This involves obtaining the geometric information of a scene from a pair of overlapping images [
64,
65,
66]. It offers the advantages of low cost, good accuracy, and low computational cost [
64,
67]. Although its application in inventory is still a growing area of research, it has been applied in several studies to estimate the biophysical parameters of trees [
45,
57,
59,
64,
68,
69,
70,
71,
72,
73,
74,
75]. This approach was used to conduct non-contact tree inventory in this study.
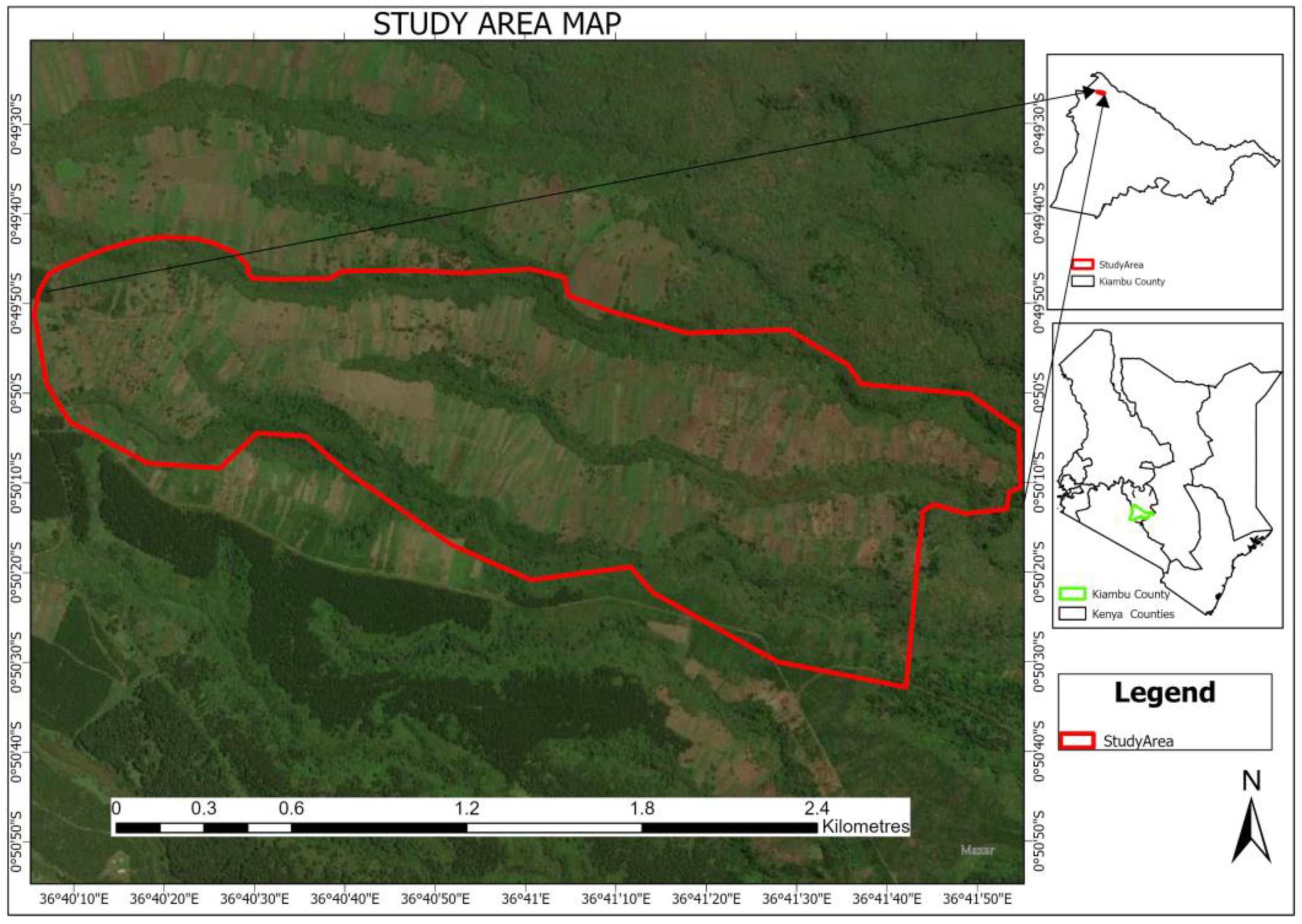
This study was conducted in a reforested stand within the Kieni Forest in Kenya to assess the applicability of stereoscopic photogrammetry in collecting forest inventory data for Kenya to automate, expedite, and ease the process of performing field data collection in forest inventory exercises. The rest of this paper is organised as follows:
Section 2 presents the methodology used in this study;
Section 3 contains the results;
Section 4 discusses the results and the limitations of our research; and
Section 5 presents the conclusions arrived at and points out directions for future work.
4. Discussion
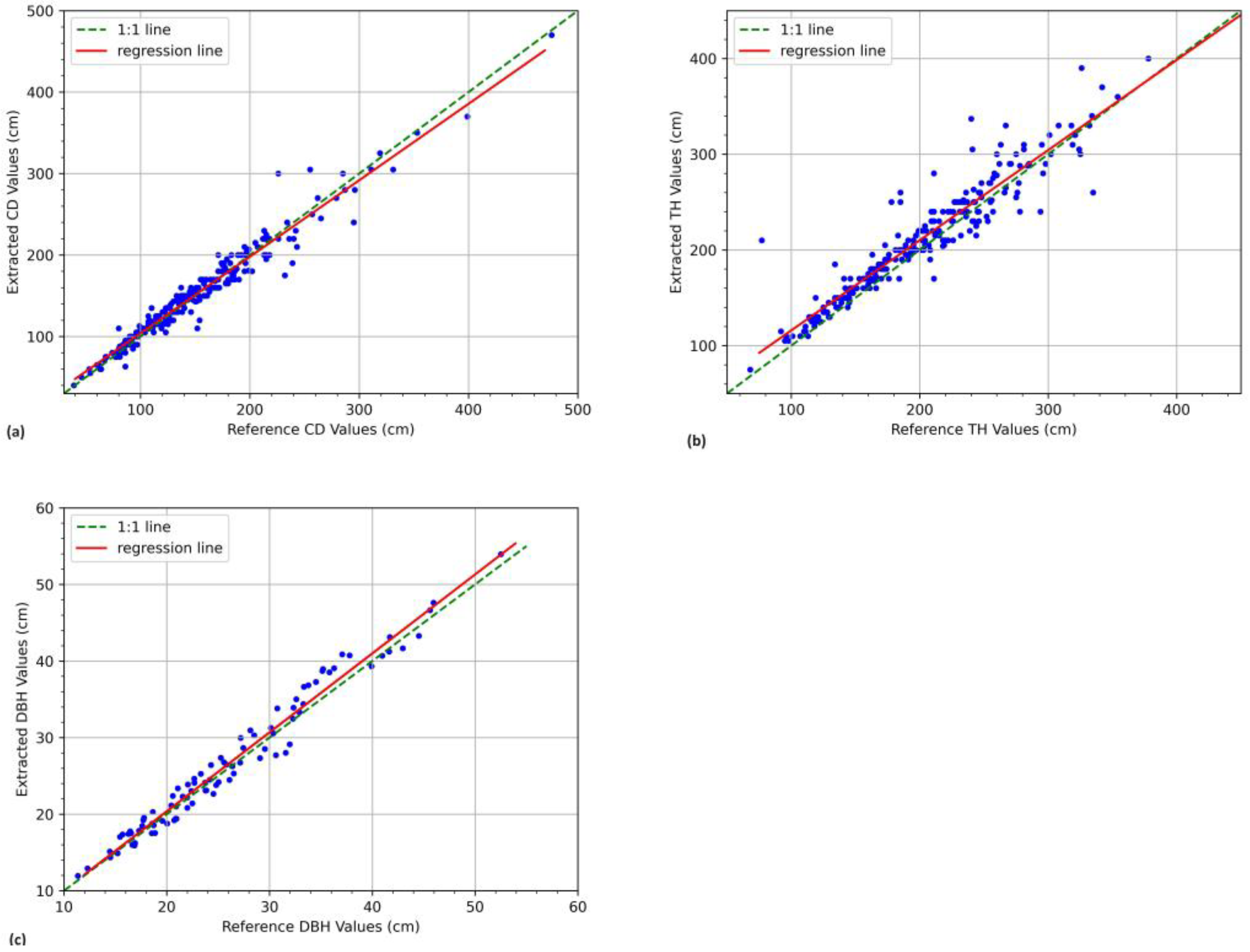
This study demonstrated stereoscopic photogrammetry for estimating tree measurements in a recently planted stand. Overall, we found that this method of non-contact tree inventory yields measurements that closely approximate ground truth measurements, as seen by the high accuracies reported. The mean absolute percentage errors (MAPEs) for the CDs, THs, and DBHs relative to the ground truth values were comparable, with slightly higher values for the tree heights. This may be attributed to the difficulty of achieving tree base delineation in images due to undergrowth and crops obstructing the view in the plantations. Similar challenges in tree extent delineation have been reported in previous studies involving non-contact techniques [
52,
68,
83]. These same reasons may have also led to the greater underestimation of tree heights compared to crown diameters, as shown by the larger bias values. As such, it is worth pointing out that this technique is suited for use in sparse plantations where individual tree extent delineation in images is not difficult to achieve.
For all biophysical parameters, the correlation between estimated and ground truth values was very high, as indicated by the values of
and the regression line slope, which are both very close to unity. Although similarly good results have been reported in other studies [
57,
59,
64,
67,
68,
73,
84], this study is the first to present an extensive validation and analysis of the use of stereoscopic photogrammetry for tree parameter estimation in a real forest setting. The scattering profiles represent the variability in the individual measurements around the regression line. In the case of both parameters, the linear scattering profile situated close to the regression line coupled with the low MAPE values attest to the precision and reliability of our stereoscopic photogrammetry approach. Scatter plots and the other metrics reported here are highly recommended for gauging the performance of a method in biophysical parameter estimation [
82]. Since the technique requires accurate segmentation of the tree to register good performance, the results affirm its practical significance in providing accurate estimates even in spatially heterogeneous environments. These findings have broader implications for forest monitoring practices, suggesting the method’s potential applicability and reliability in similar spatial contexts. Researchers and practitioners engaged in tree dimension estimation can leverage these insights to enhance their understanding and implementation of stereoscopic photogrammetry. In the broader context of planetary health, these parameters may then be used as input variables to allometric equations for calculating biomass and carbon stocks, for developing tree growth models, and so on [
11,
21,
85].
As shown in
Table A2 (
Appendix B), the acquisition and storage of an image pair take place instantly since the actions themselves involve nothing more than capturing images. Since the processing of the images is performed after the acquisition is completed, the images of all the sampled trees can be acquired in the field, making the field survey exercise much faster and less cumbersome. Segmentation of the images in this study involved significant human interaction using image labelling software to ensure perfectly accurate masks were generated. This step can, however, be automated by implementing semantic segmentation based on deep learning [
86,
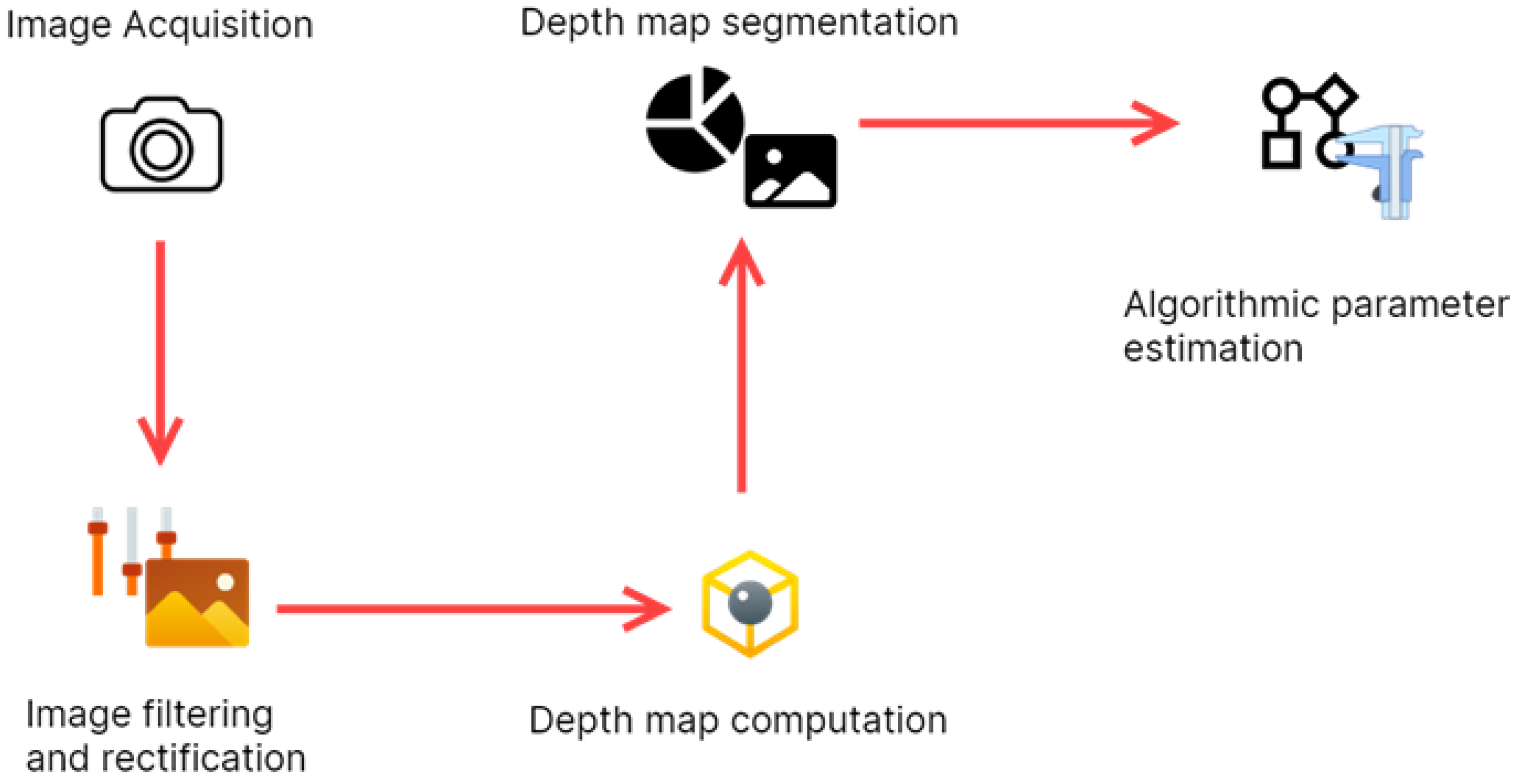
87], thus paving the way for real-time tree parameter estimation. This is an area of investigation for future research. The rest of the steps of image filtering, rectification, depth map computation and segmentation, and algorithmic parameter estimation are all packaged in a piece of software developed during this study [
78]. Using this software, the extraction of all parameters of the 251 trees took approximately 2 min, a much shorter period than the three days taken to collect the ground truth data in the field. These observations imply that obtaining tree biophysical parameters from sample plots is much easier and faster using stereoscopic photogrammetry.
As an emerging proximate sensing technology, stereoscopic photogrammetry proves invaluable in field surveys and, consequently, in the effective implementation of REDD+. This technology facilitates the swift estimation of tree biophysical parameters, ensuring a rapid and efficient process [
57,
64,
68,
73]. Given that REDD+ and other policy frameworks necessitate precise data for informed decision making [
3,
4,
6,
10], the accuracy reported in this study underscores the potential of stereoscopic photogrammetry to contribute to evidence-based policy formulation. This aligns seamlessly with international reporting obligations, exemplified by the Global Forest Resources Assessment (FRA) [
1,
3,
6,
7], where the granularity of forest inventory data is an imperative commitment fulfilled by this technique [
20]. The minimal training required for its use further enhances the capacity of forest management agencies to implement comprehensive forest-related policies.
Comprehensive and meticulous records of above-ground biomass (AGB) in Kenya are notably scarce [
25,
26], a common challenge facing many developing nations where the availability of high-quality data for international reporting lags behind that of developed counterparts [
3]. Addressing these issues necessitates the establishment of a robust national forest monitoring system (a plan that is underway in Kenya) that would provide a dependable framework for forest monitoring [
3,
5,
40]. As an emerging plot-level forest inventory technology, stereoscopic photogrammetry seamlessly aligns with this objective, offering precise measurements that increase the accuracy of carbon sequestration assessments [
17]. Beyond carbon estimation, the proposed technique proves invaluable for monitoring reforestation and afforestation initiatives by enabling the timely tracking of stand growth in rapidly developing plantations such as young forest stands [
39]. This becomes particularly pivotal in areas witnessing extensive reforestation and afforestation, where the monitoring rate needs to keep up with the pace of plantation establishment.
Since forests play a crucial role in carbon sequestration and climate change mitigation, there is a pressing need to consistently enhance the capacity for swift and precise forest monitoring. This study signifies a notable stride in that direction, constituting a valuable contribution toward the realisation of SDG 13 on climate action. The accuracy of projections aimed at reversing or mitigating climate change is intrinsically linked to the precision and reliability of the underlying data [
11,
21,
69]. This underscores the importance of obtaining accurate data, a principle fundamental to this study. Moreover, the research aligns harmoniously with SDG 15 on biodiversity conservation, as it facilitates the monitoring of forest ecosystems, thereby contributing significantly to the preservation of biodiversity and the promotion of sustainable land management practices [
30,
31,
38,
77].
The cameras used in this study have a low resolution of 720 × 1280 pixels, which reduces the maximum distance from the stereo camera for which an accurate measurement can be extracted [
48,
49]. This is one of the limitations of this study and can be easily addressed by using higher-resolution cameras. In this study, we focused on estimating only the crown diameters and tree heights because the study area comprised mainly saplings with trunks covered by twigs or too slender to be measured. The occlusion of the trunk made it impossible to estimate the diameter using the proposed non-contact technique. This is yet another limitation of this technique and, indeed, an inherent limitation of light-based measurement systems [
67,
72]. Notwithstanding these limitations, the ability to extract the crown diameter and tree height in a fast, accurate, and low-cost non-contact approach as achieved in this study is a valuable contribution to the science of forest inventory, especially when monitoring young stands such as those in the study area.
Future research can be explored in areas such as automated tree crown segmentation based on deep learning, real-time biophysical parameter extraction, and the combination of terrestrial field surveys with aerial surveys for further validation.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








