1. Introduction
The underwater glider (UG) is a kind of buoyancy-driven oceanic observation robot [
1,
2,
3]. They are not equipped with propellers, but rely on manipulating buoyancy and attitude to navigate [
4,
5]. Combined with the necessary GPS positioning and satellite communication, gliders are able to achieve autonomous observations for months. With low vibration, long range and high autonomy, UGs are widely used in oceanic sampling missions. Among them, glider-based currents observation has been brought into focus [
6,
7,
8]. This is because the currents sampling via gliders greatly reduces the involvement of measurement vessels and collects data with high autonomy and acceptable quality. However, such missions are extremely demanding for pitch angle controls [
9]. Prevailing UG current measurements utilize the acoustic Doppler to current profiler (AD2CP) sensor developed from Nortek [
10]. The AD2CP has strict requirements on the beam angle, and the non-conforming attitude of the glider will bring obstacles to the subsequent data processing or even seriously affect the quality of the data. Therefore, to ensure the high precision control of pitch angle becomes the key issue for glider currents measurement. However, the following encountered challenges should be considered.
The sudden change of density in the pycnocline will bring significant disturbance to the pitch control of the glider [
11]. Pycnocline is a common oceanic phenomenon that describes a stratified seawater structure [
12]. Following the classical three-layer simplified model, the partial derivative of seawater density with respect to depth in pycnocline is significantly larger than that in the upper and lower layers. This results in a steep increase in seawater density over a limited depth range. The effect of pycnocline disturbance is particularly dramatic for the buoyancy-driven underwater gliders [
13,
14]. The deviation of the pitch angle from the expected value fluctuates significantly during the passage through the layer. Furthermore, the dynamics of gliders in the pycnocline needs further discussions.
The actuator constraints of the glider imposes challenges for the precise control of the pitch angle [
15,
16]. The adjustment of the pitch angle depends on the value of the buoyancy engine, the displacement of the movable mass and the hydrodynamic damping [
17]. The buoyancy-driven system of the glider consists of the inner and the outer bladders. The adjustment of the buoyancy is achieved by the transfer of the oil between the two structures [
18]. Usually, the buoyancy engine is set to a constant action strategy in order to dive to a well-defined depth. This means that the buoyancy engine is not controlled in real time during the pitch control procedure, but the density disturbance from the environment will be introduced in the dynamics modeling via the buoyancy engine [
19,
20,
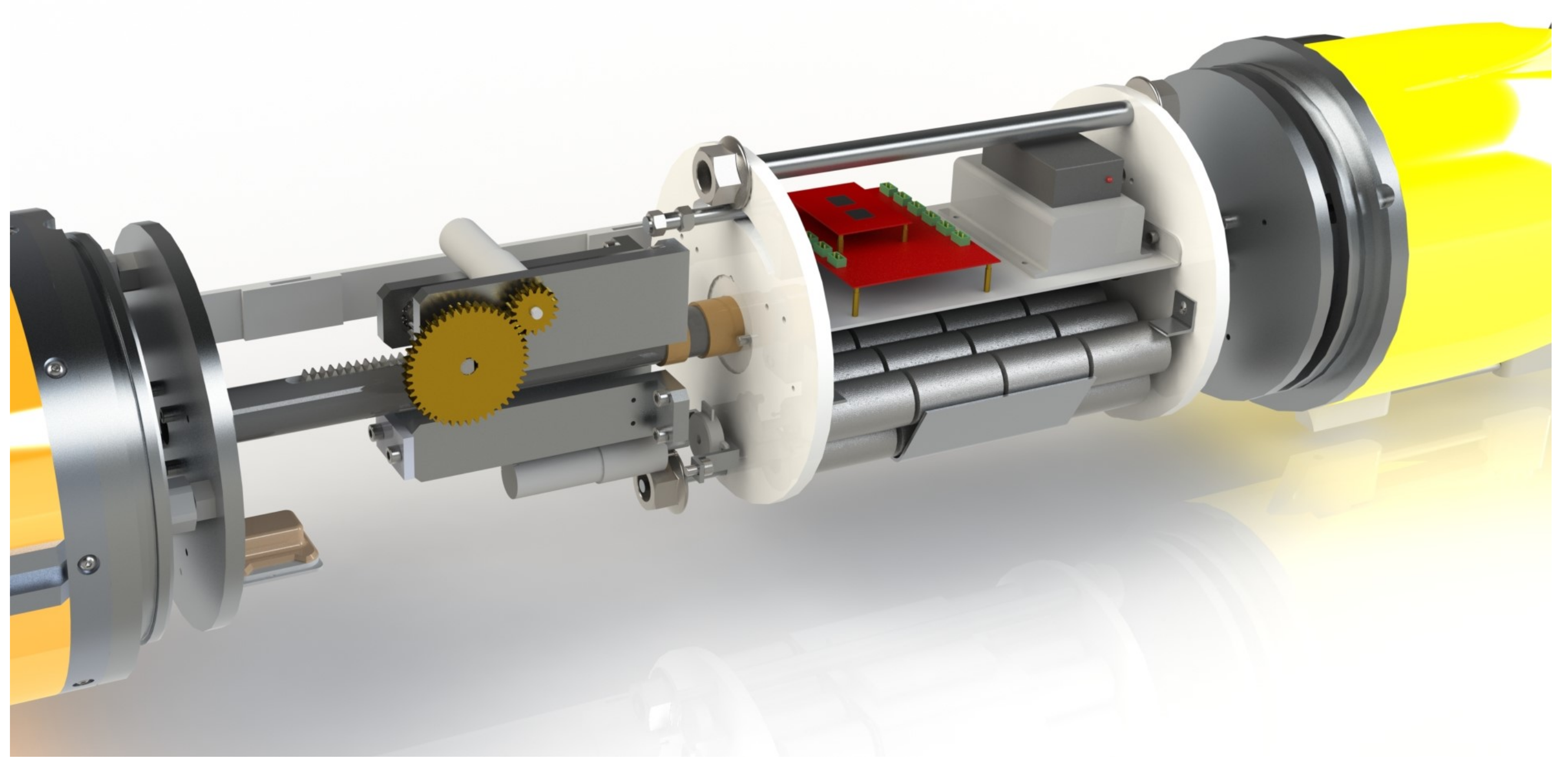
21]. In addition, due to the influence of hydrodynamics, the pitch of the glider will cause oscillation during the adjustment process, resulting in the decrease of control accuracy. So the displacement of the movable mass plays a key role in controlling the pitch of the glider. The position of the movable mass is driven by a drive system consisting of a DC motor and a gear train [
22]. Therefore, the actuator constraints must be considered when designing the control inputs, because the actuator constraints limit the feasibility of the control inputs.
Another challenge for the precise pitch control of gliders is to achieve the suppression of disturbances by the control algorithm. Many outstanding researches have been carried out in the field of pitch control of underwater gliders [
23,
24,
25]. Among them, the bang-bang control has the concise structure. It does not depend on the control model [
26]. For these reason, bang-bang control acts the basic method for glider pitch control. However, the controlled quantity of bang-bang is difficult to coordinate between overshoot and high accuracy. Proportion integration differentiation (PID) is widely used in glider pitch control for its engineering feasibility [
27]. However, PID does not perform convincingly in the face of pycnocline control. In our previous work, applying the ADRC to control the glider pitch angle was introduced [
22]. However, the previous work does not sufficiently consider the actuator constraints. Based on the above discussion, we believe the anti-disturbance algorithm for glider traversing the pycnocline considering the specific hardware demanding investigation.
In this work, we propose the actuator constrained active disturbance rejection method for controlling the pitch of the glider in the presence of the pycnocline. Main contributions are concluded as follows. Firstly, we derive the dynamics model of the glider. On this basis, we analyze the longitudinal plane nonlinear motion model containing the variable buoyancy term. Secondly, we propose the ADRC control algorithm considering actuator constraints to alleviate the interference of the pycnocline and meet the practical situation of glider hardware. Finally, we propose the metrics for controlling pitch angle in the presence of the pycnocline. The simulation results show that the proposed method has significant improvement in control accuracy of pitch angle compared with the comparison methods.
The paper is organized as follows:
Section 2 derives the glider dynamic model.
Section 3 demonstrates the ACADRC.
Section 4 introduces three typical structures of the pycnocline and the control metrics.
Section 5 presents the numerical simulation results and discussions. Finally, conclusions are summarized.
5. Numerical Simulation Results and Discussion
To examine the ACADRC control effect, we conduct the motion simulation of the glider in the presence of three types of pycnocline. The bang-bang control and the PID control are introduced to compare the control effect. The diving depth of the glider is set to 200 m. Because the interference of the pycnocline on the pitch control is mainly focused, we consider the movable mass of the glider as non-rotatable. Therefore, the roll angle and the heading angle of the glider are all zero degree during the simulation.
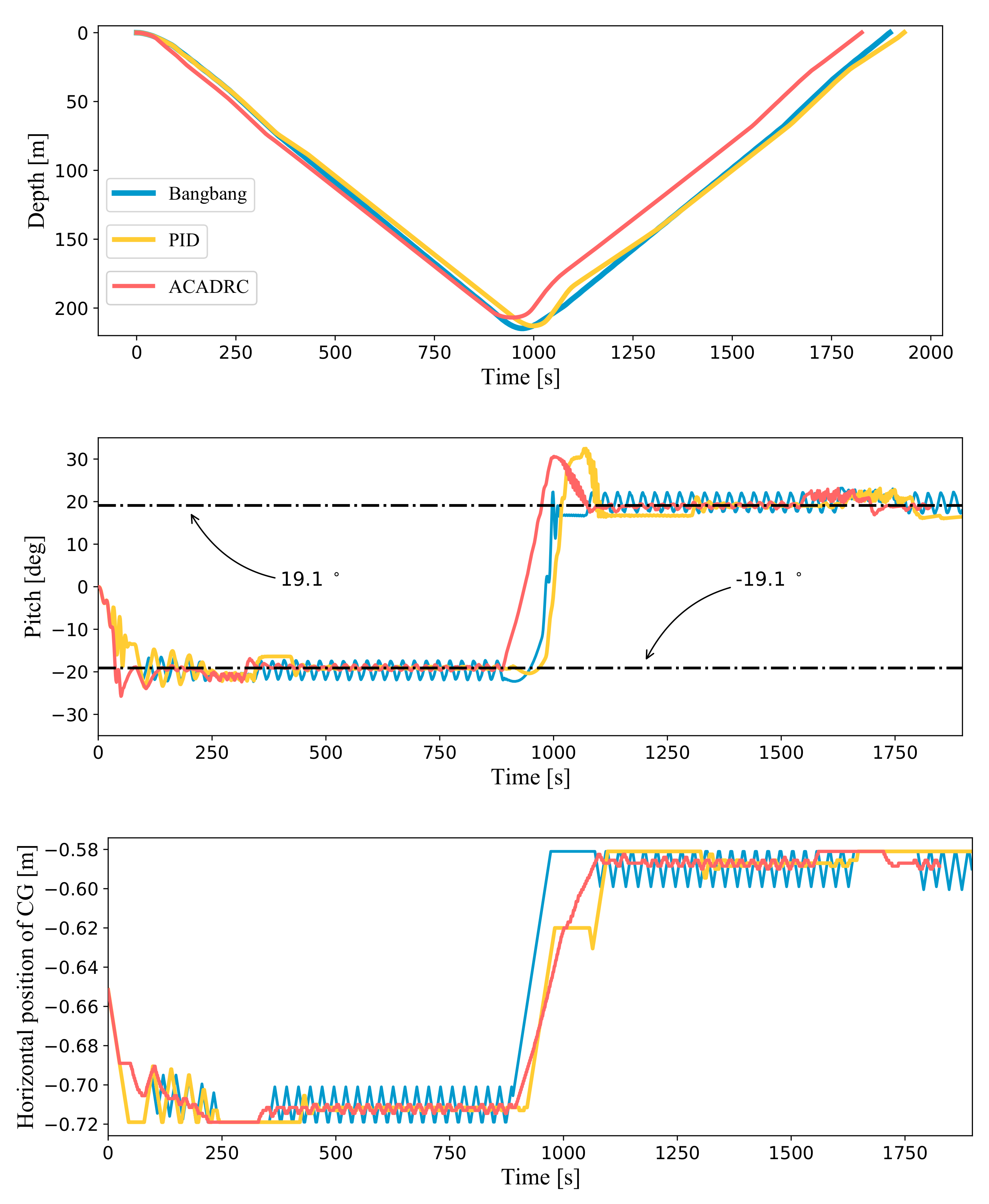
Figure 8,
Figure 9 and
Figure 10 present the motion simulation results, which consists of the depth results and the pitch results.
According to the simulation results. Although bang-bang control is a common control techniques for engineering applications. However, it leads to drastic oscillations in pitch angle and insufficient suppression in the face of disturbances caused by density jumps. However, the pitch angle under bang-bang control did not show significant overshoot. PID control has a significant improvement in accuracy compared to bang-bang control. However, the control effect performs unstably between the diving and floating. Furthermore, the control results show that the pitch angle has interval steady-state errors and is seriously affected by density disturbances. In addition, the pitch angle of PID control has significant overshoot.
The pitch angle controlled by ACADRC is more stable than the comparison method. The pitch angle can be controlled around the target pitch angle. Furthermore, it has a better suppression effect on density interference than the comparison method. The disadvantage lies in that the ACADRC still has overshoot. However, the overshoot of both ACADRC and PID occurs in the surfacing phase and the glider does not reach the flare point. As defined in
Section 4.2, the control metrics for the pitch control during the selected interval are listed in
Table 4. The results indicate that the ACADRC has the comprehensive performance over the comparison methods in the aspect of lower variance and closer mean value to the target pitch.
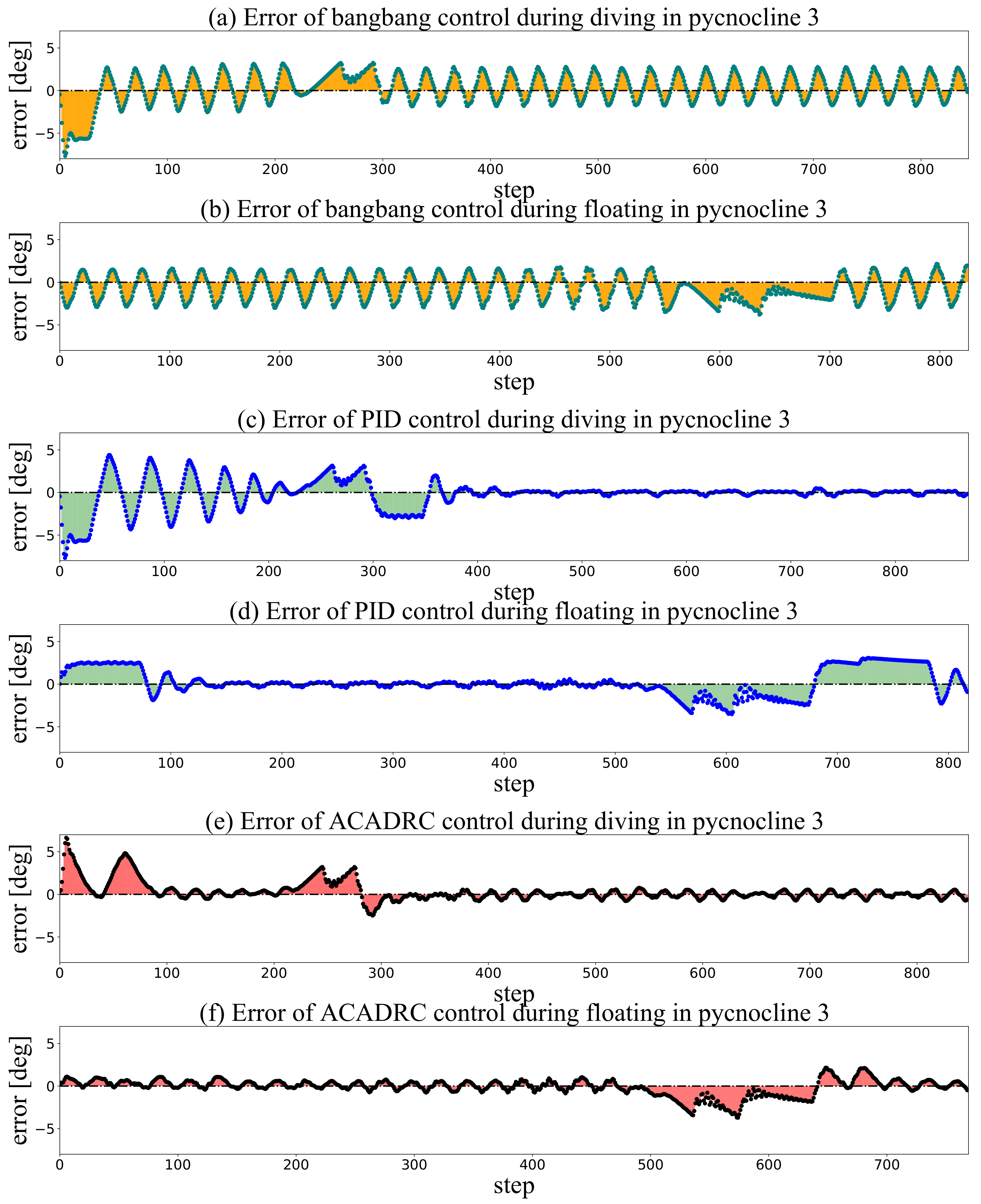
To better visualize the error of the controlled pitch with respect to the target pitch, we provide the
Figure 11,
Figure 12 and
Figure 13. For each control algorithm, we show error plots for the diving control phase and the floating control phase. According to the figures, the pitch angle under bang-bang control fluctuates up and down along the target pitch, resulting in poorer accuracy. In contrast, PID has high control accuracy in some stages, and even performs best in all three algorithms. However, the PID cannot achieve the globally accurate pitch control. The performance of ACADRC is weaker than PID in some areas, but the control effect is smoother in the whole control cycle and the suppression of density variation is better than the comparison method. It is worth noting that the glider cannot suppress the deviation of the pitch angle even if the movable mass is adjusted to the limit position due to the abrupt change of density in the pycnocline. At this point, all three discussed methods are unable to control the pitch angle to maintain the set angle. However, ACADRC can make a continuous estimation of the disturbance to compensate the control signal and make the pitch angle return to the set state quickly. In contrast, the PID control still suffers from oscillations and delays. Therefore, we believe that ACADRC is capable of accurately controlling the pitch in the presence of the pycnocline.
6. Conclusions
In this work, we have discussed the problem of accurate control of the pitch angle of the glider in the presence of the pycnocline. We have established the longitudinal model of the glider considering density variation based on the derived six-degree-of-freedom glider dynamics equations. On this basis, the influence of three typical pycnocline structures on the pitch of the glider has been considered. The simulation results have shown that the abrupt density change caused by pycnocline will bring significant disturbance to the pitch angle. The actuator constraints of the glider in conjunction with the hardware characteristics of the glider have been discussed. Under this constraint, the input of the control algorithm cannot be fully mapped to the actuator action, which has deteriorated the effectiveness of the control algorithm. The ACADRC has been proposed for this purpose, which, on the one hand, has allowed estimating disturbances in real time during the control process. At the same time, the output has been improved to better adapt to the actuator constraints for the purpose of achieving better pitch control results. The simulations have shown the advantages of the proposed method in terms of pitch control accuracy compared to bang-bang control and PID control.
Future work will focus on further suppression of pitch angle errors caused by pycnocline, as well as field tests.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}