
COLREGs: Compliant Dynamic Obstacle Avoidance of USVs Based on the Dynamic Navigation Ship Domain

Abstract
:1. Introduction
2. Preliminaries
2.1. Mathematical Model of USVs
2.2. COLREGs in Collision Avoidance
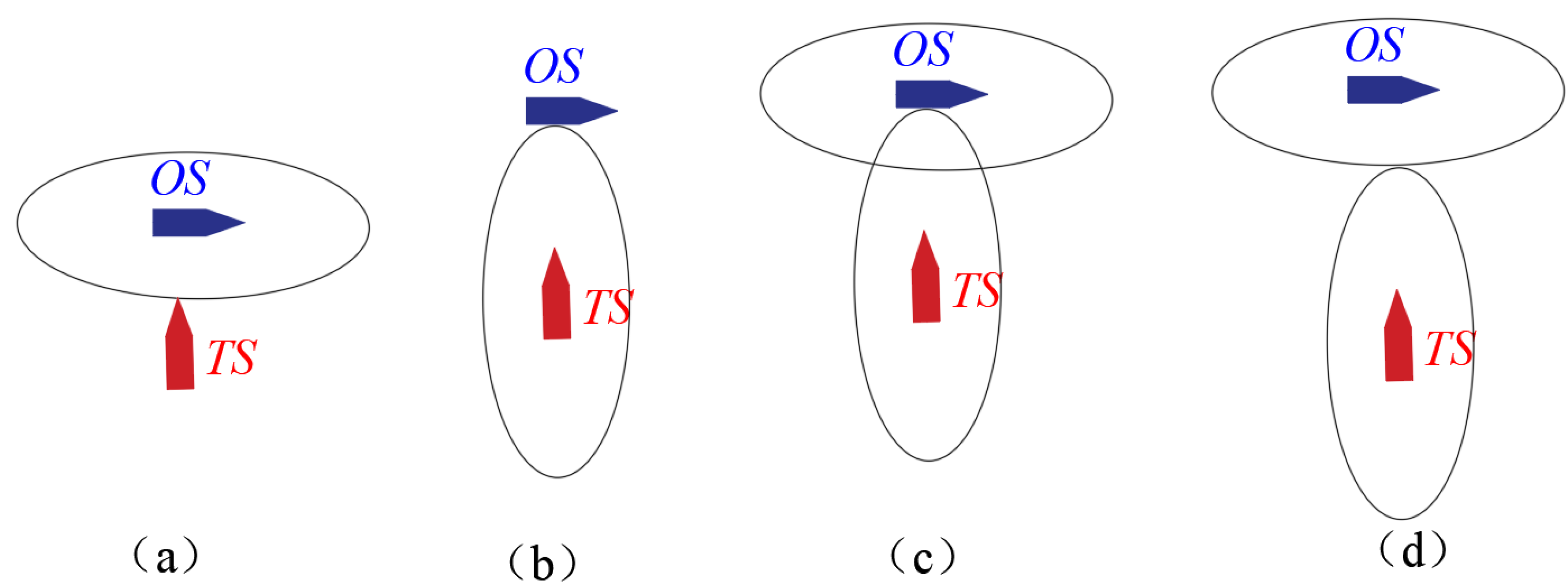
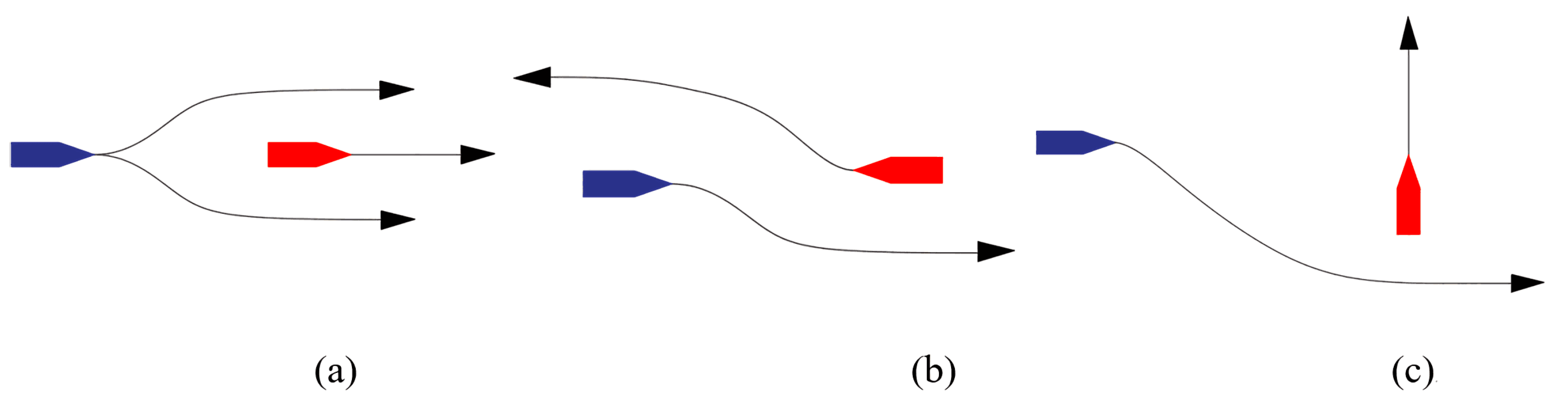
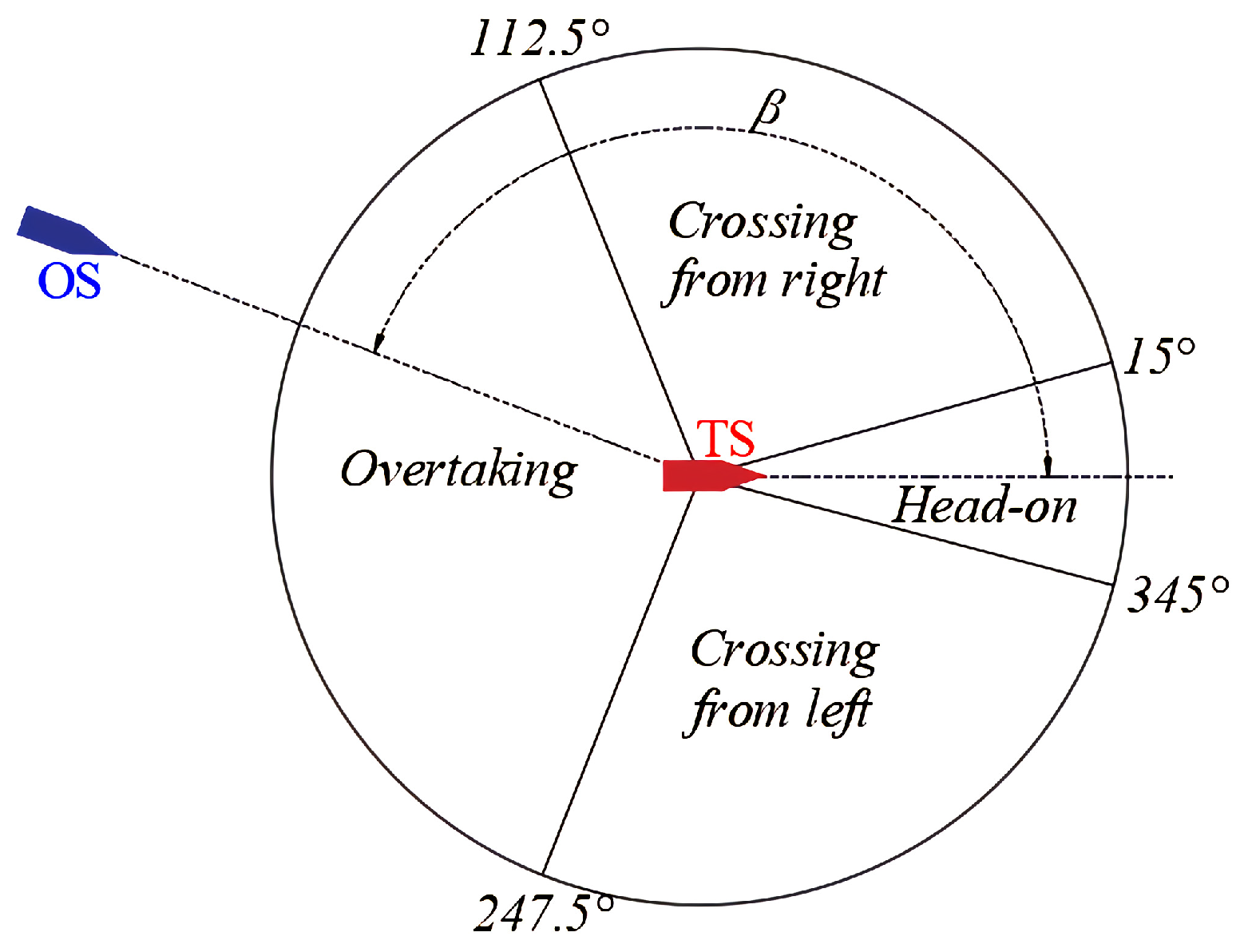
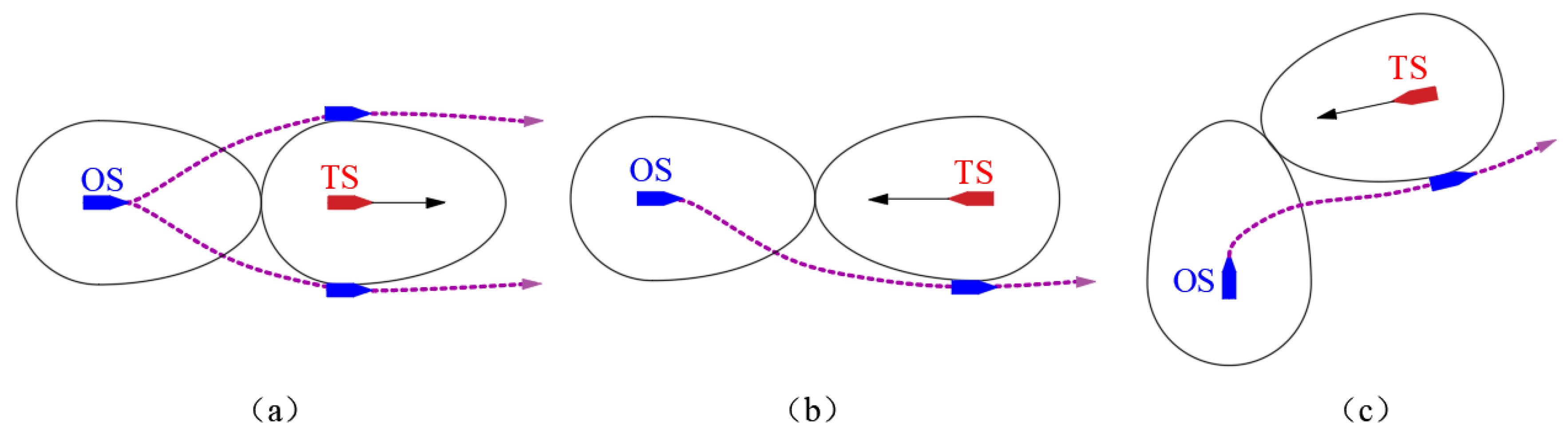
- Rule 13 (overtaking): The OS shall be deemed to be overtaking when coming up to the target ship (TS) from a direction of more than 22.5 degrees abaft its beam. In this situation, the OS shall overtake the TS from either the port or the starboard side of the TS (see Figure 2a);
- Rule 14 (head-on): When the OS and TS meet on reciprocal or nearly reciprocal courses, each shall alter its course to starboard (see Figure 2b);
- Rule 15 (crossing): Crossing refers to two vessels encountering each other between the direction of and (port and starboard). The vessel that has the other on its starboard side shall keep out of the way (see Figure 2c).
3. Modified Dynamic Navigation Ship Domain
4. COLREGs-Compliant Dynamic Navigation Ship Domain-Based Dynamic Obstacle Avoidance
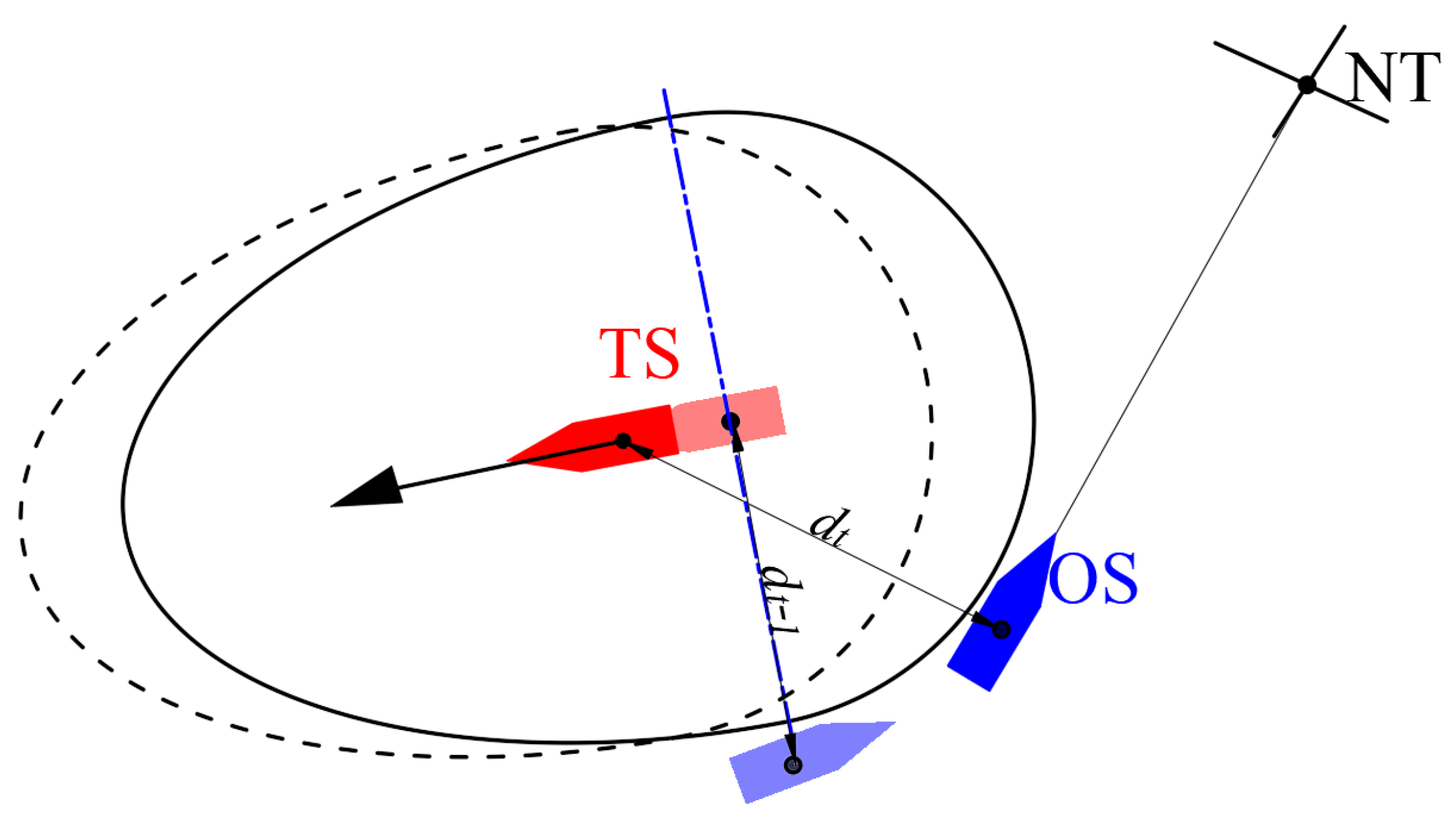
4.1. Obstacle Avoidance Time Inference
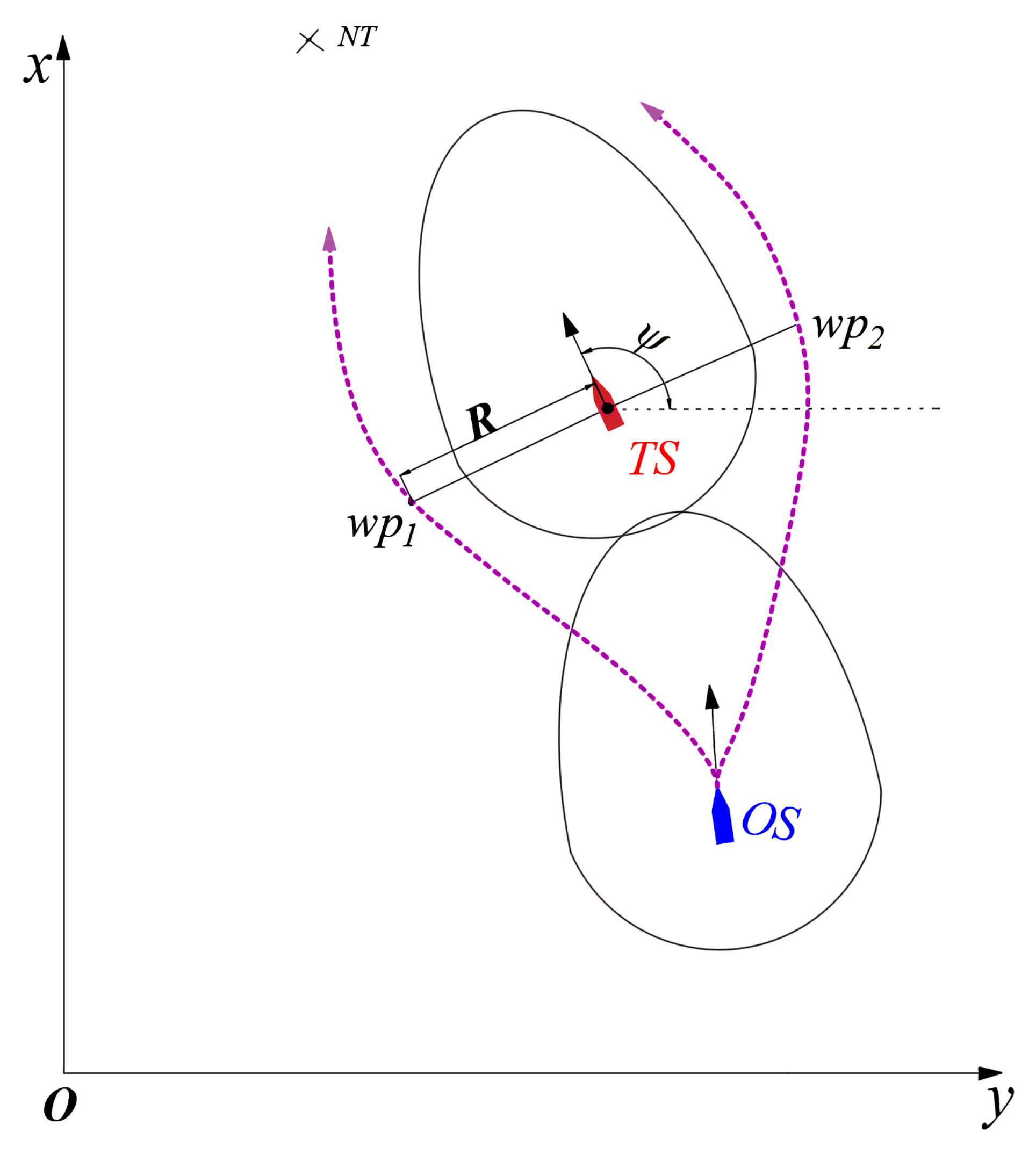
4.2. Local Avoidance Path Planning
- (1)
- Determine the encounter situation regarding COLREGs
- (2)
- Decide which side to pass on
- (3)
- Generate the avoidance waypoints and trajectory
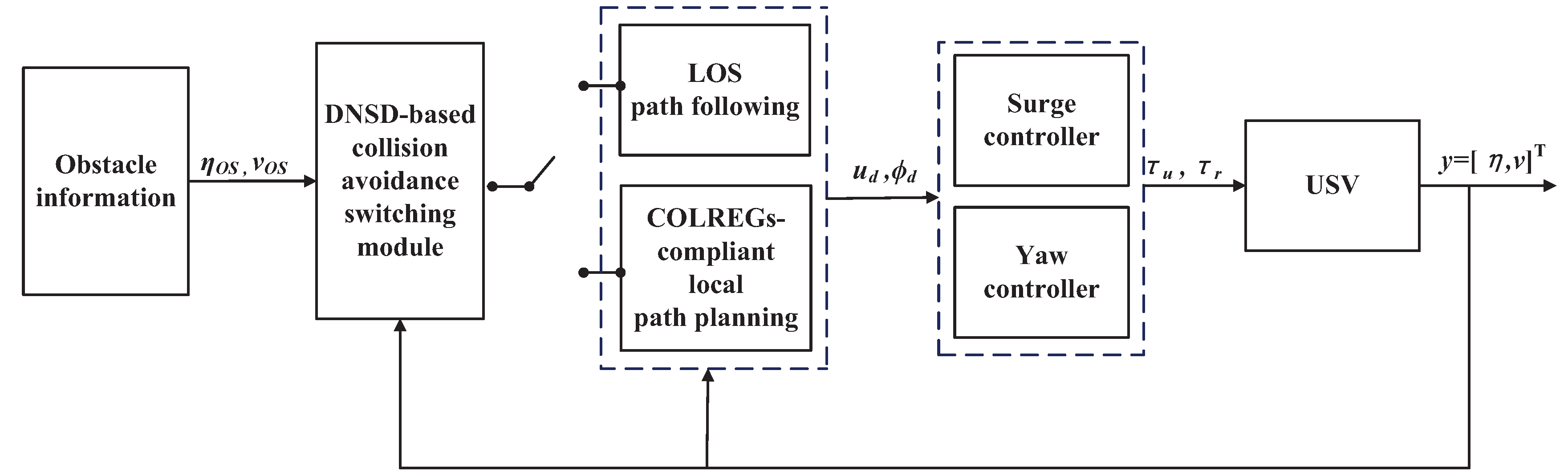
4.3. Mode Switching to Path Following
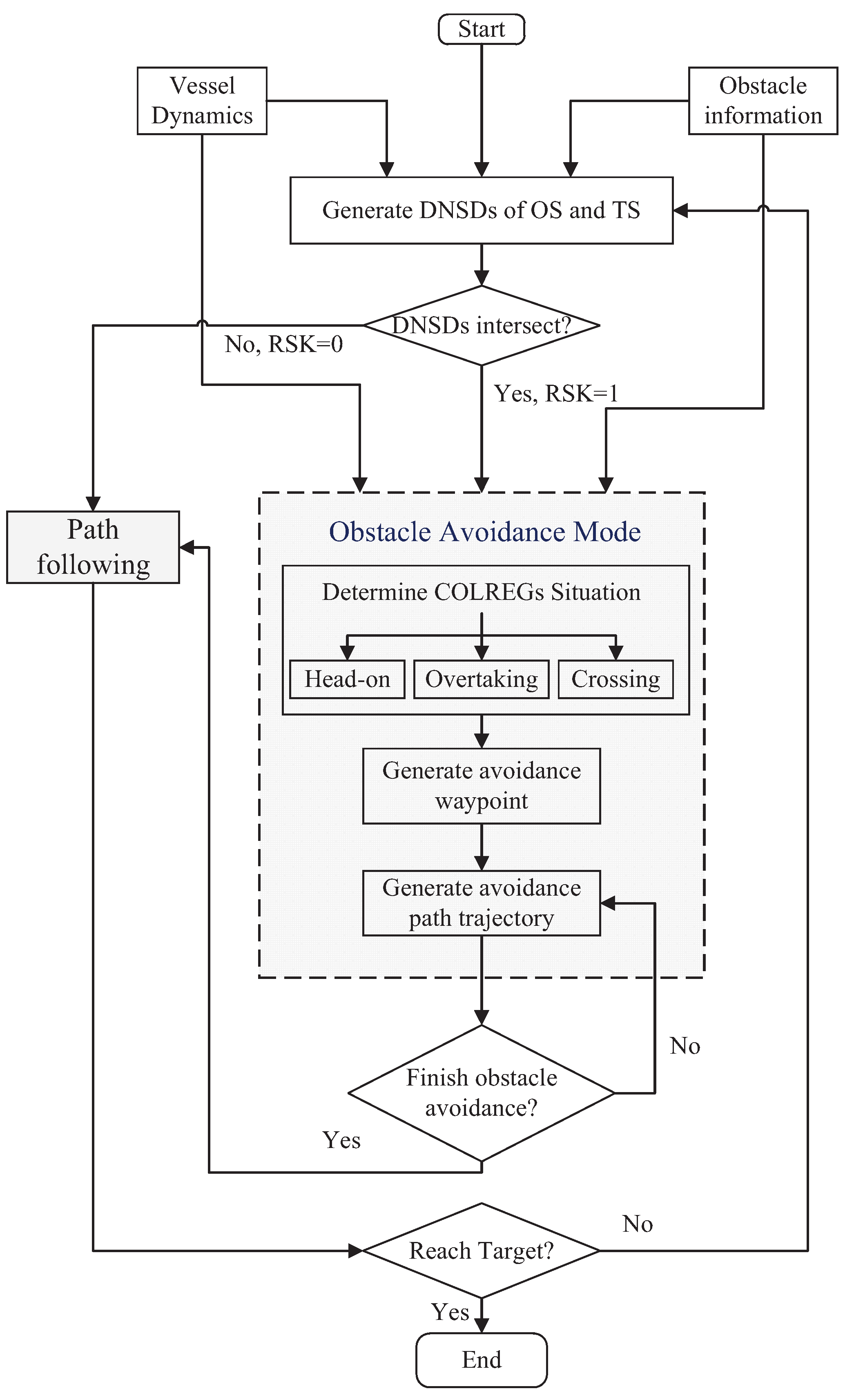
4.4. Implementation of the DNSD-Based Method
- Calculating the DCPA between the OS and TSs and choosing the TS with the smallest DCPA as the most dangerous TS;
- Determining the COLREGs encounter situation by calculating the relative bearing angle according to (5);
- Assessing the collision risk by (13) and determining the navigation mode: obstacle avoidance or path following;
- Determining whether to finish obstacle avoidance; if not, return to Step 6; otherwise, switch to path following mode;
- Repeat the above steps until the target point is reached.
5. Simulation and Discussion
5.1. Simulation Scenarios and Parameter Setting
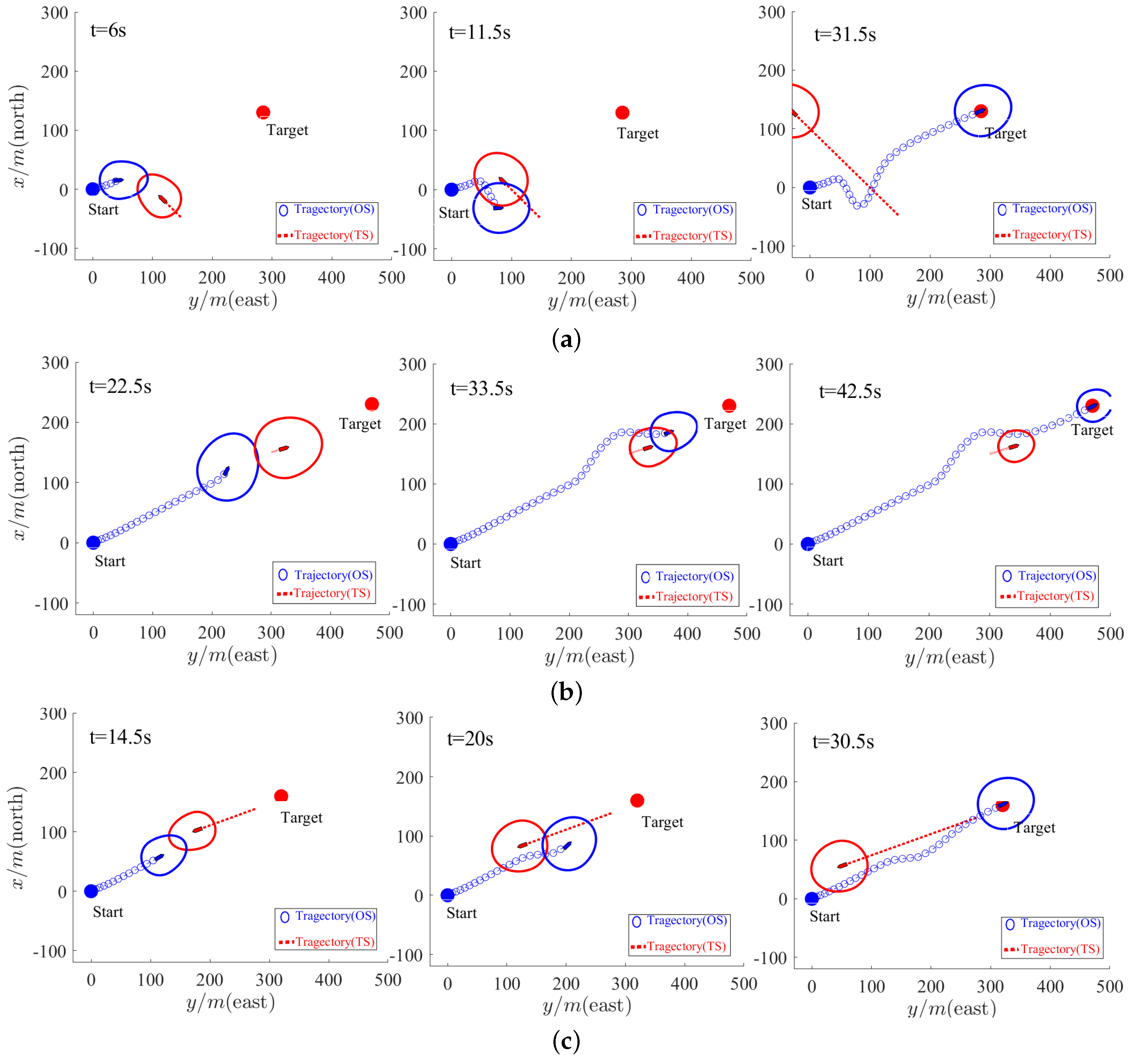
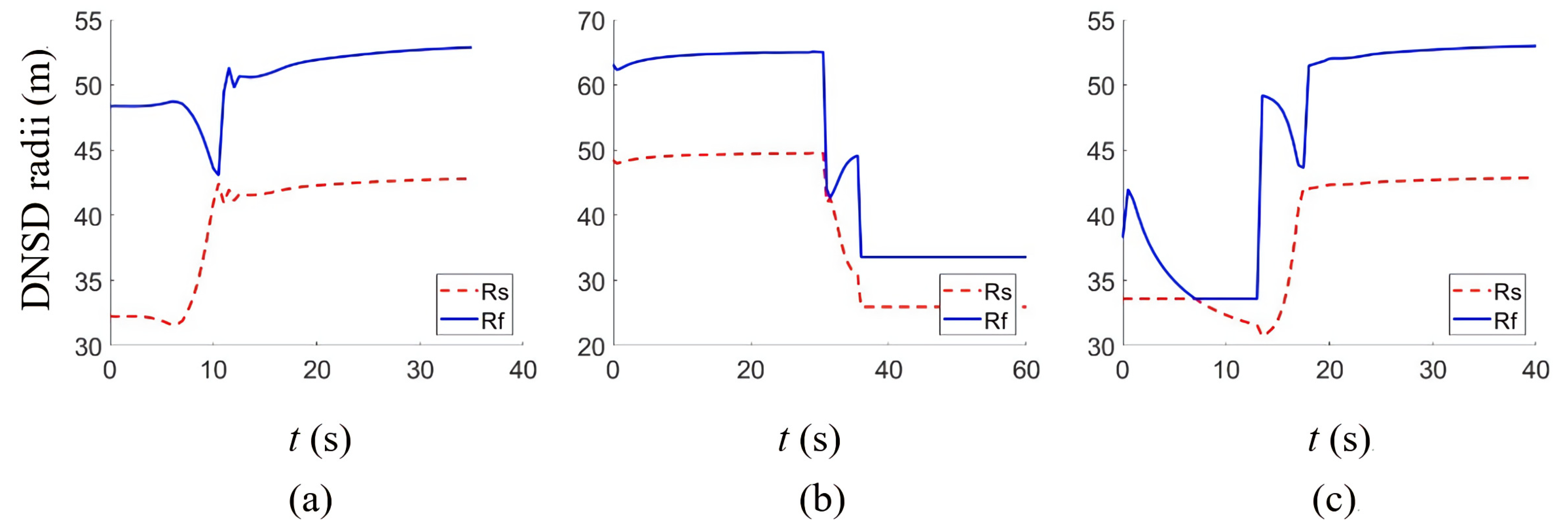
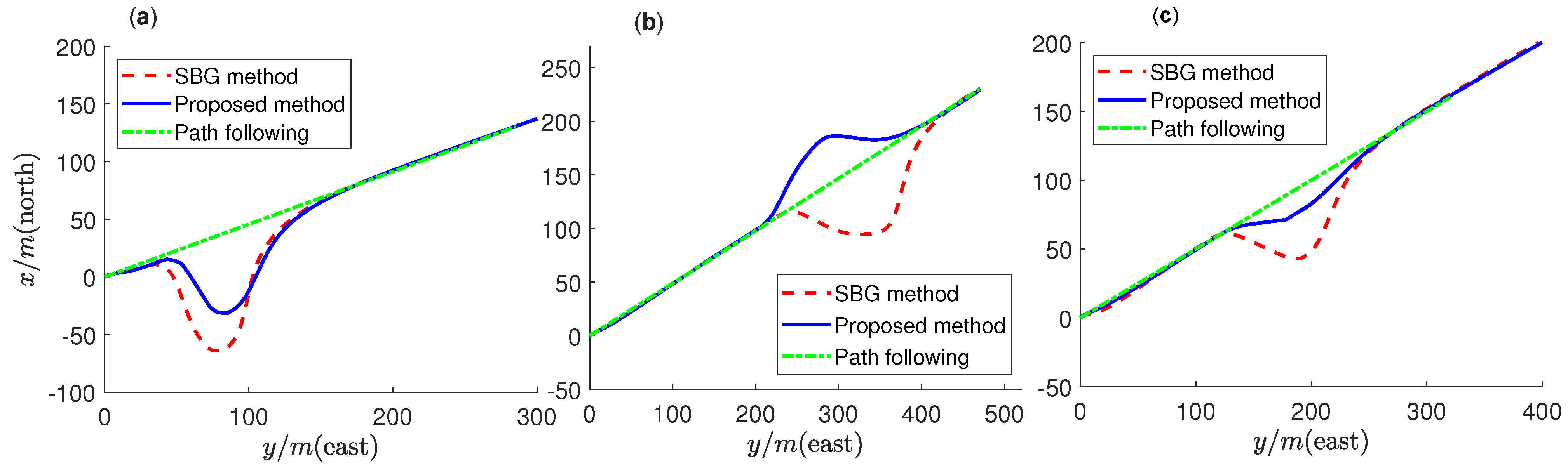
5.2. Single Obstacle Avoidance Performance Verification
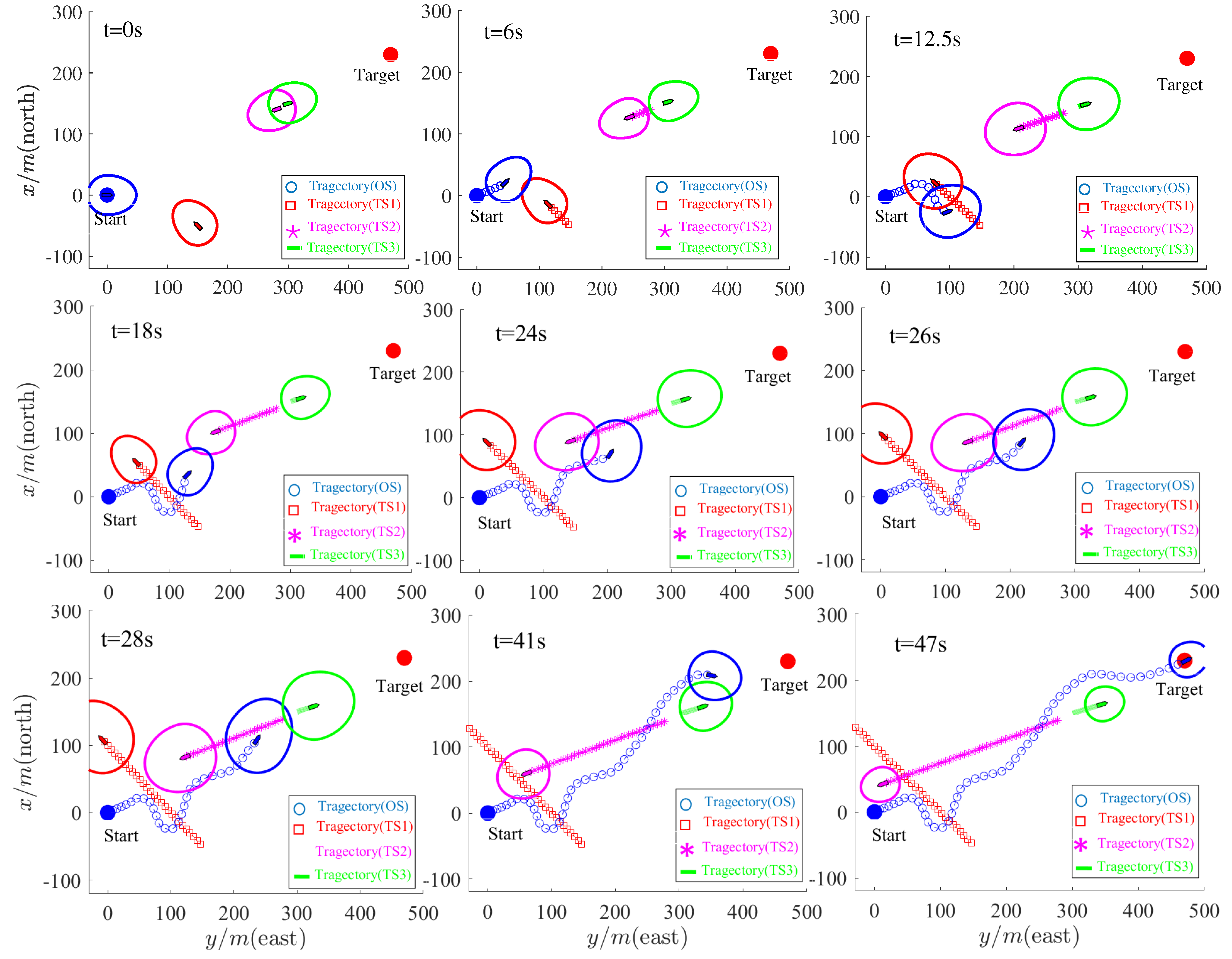
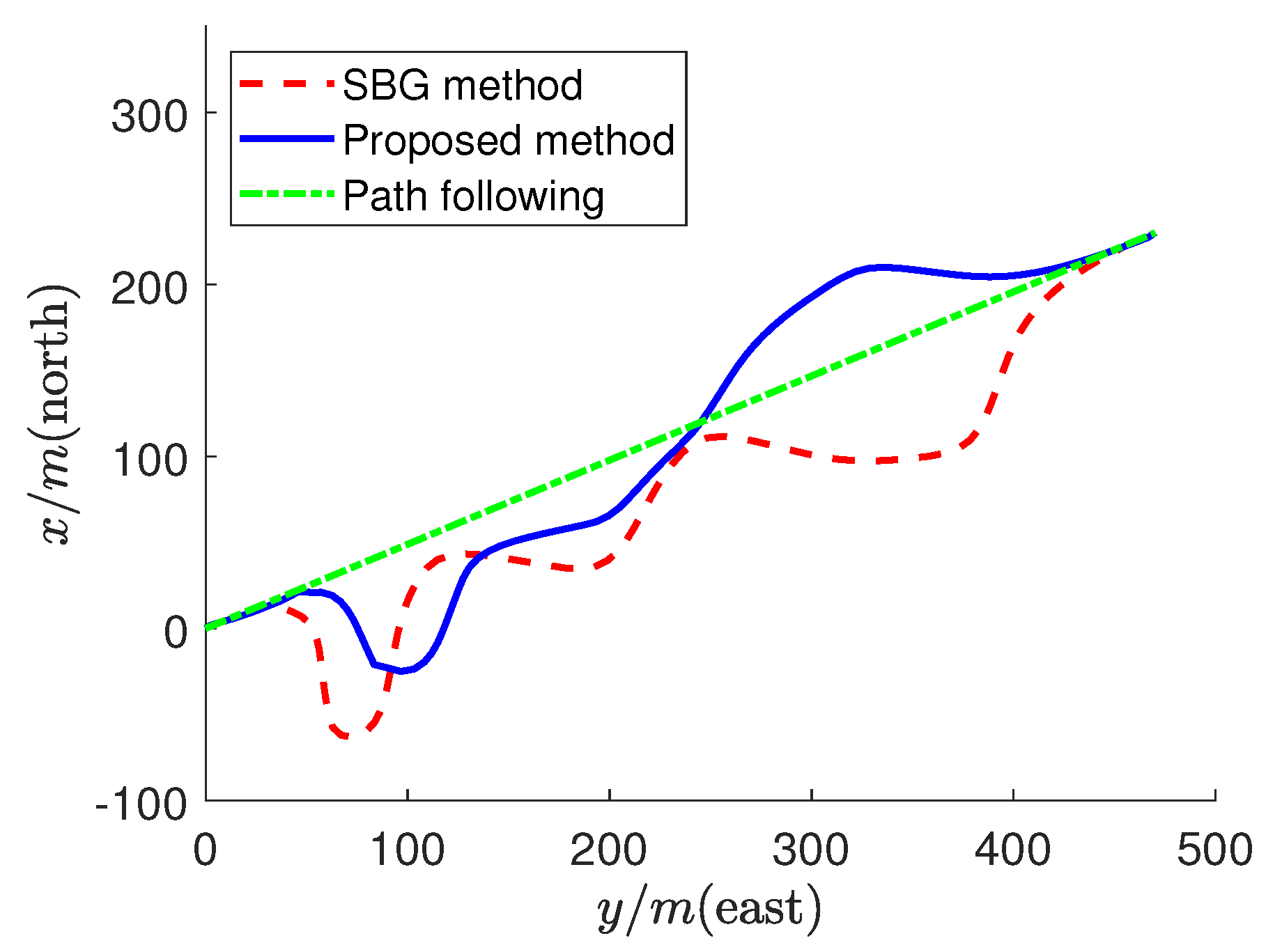
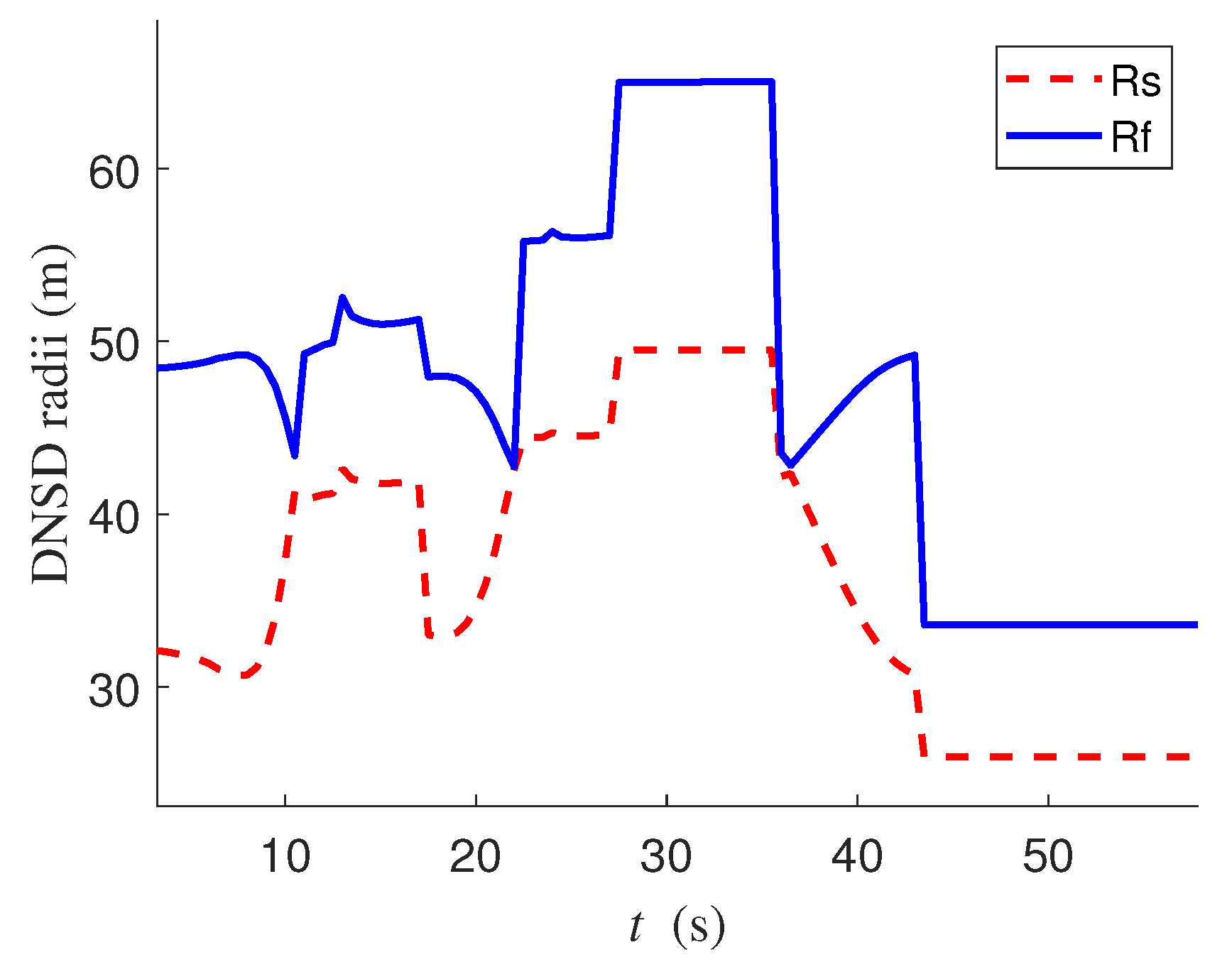
5.3. Multiple Obstacle Avoidance Performance Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kurowski, M.; Thal, J.; Damerius, R.; Korte, H.; Jeinsch, T. Automated Survey in Very Shallow Water Using an Unmanned Surface Vehicle. IFAC PapersOnLine 2019, 52, 146–151. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef]
- Stateczny, A.; Burdziakowski, P.; Najdecka, K.; Domagalska-Stateczna, B. Accuracy of Trajectory Tracking Based on Nonlinear Guidance Logic for Hydrographic Unmanned Surface Vessels. Sensors 2020, 20, 832. [Google Scholar] [CrossRef] [PubMed]
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control. 2012, 36, 267–283. [Google Scholar] [CrossRef]
- Fu, M.Y.; Wang, S.S.; Wang, Y.H. Multi-Behavior Fusion Based Potential Field Method for Path Planning of Unmanned Surface Vessel. China Ocean. Eng. 2019, 33, 583–592. [Google Scholar] [CrossRef]
- Mousazadeh, H.; Kiapey, A. Experimental Evaluation of A New Developed Algorithm for An Autonomous Surface Vehicle and Comparison with Simulink Results. China Ocean. Eng. 2019, 33, 268–278. [Google Scholar] [CrossRef]
- Gao, Z.J.; Zhang, Y.J.; Sun, P.T. Overview of research on unmanned ships. J. Dalian Marit. Univ. 2017, 43, 1–7. [Google Scholar]
- Woo, J.; Kim, N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning. Ocean. Eng. 2020, 199, 107001. [Google Scholar] [CrossRef]
- Baker, C.C.; Seah, A.K. Maritime accidents and human performance: The statistical trail. In Proceedings of the MARTECH 2004, Singapore, 22–24 September 2004. [Google Scholar]
- Huang, Y.M.; van Gelder, P.H.A.J.M. Collision risk measure for triggering evasive actions of maritime autonomous surface ships. Saf. Sci. 2020, 127, 104708. [Google Scholar] [CrossRef]
- Almeida, C.; Franco, T.; Ferreira, H.; Martins, A.; Santos, R.; Almeida, J.M.; Carvalho, J.; Silva, E. Radar based collision detection developments on usv ROAZ II. In Proceedings of the Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009. [Google Scholar]
- Kuwata, Y.; Wolf, M.; Zarzhitsky, D.; Huntsberger, T. Safe maritime autonomous navigation with COLREGS, using velocity obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–419. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. Review of ship safety domains: Models and applications. Ocean. Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Fiskin, R.; Nasiboglu, E.; Yardimci, M.O. A knowledge-based framework for two-dimensional (2D) asymmetrical polygonal ship domain. Ocean. Eng. 2020, 202, 107187. [Google Scholar] [CrossRef]
- Myre, H. Collision Avoidance for Autonomous Surface Vehicles Using Velocity Obstacle and Set-Based Guidance. Master’s Thesis, Norwegian University of Science and Technology, Norwegian, Trondheim, Norway, 2015. [Google Scholar]
- Coldwell, T. Marine traffic behavior in restricted waters. J. Navig. 1983, 36, 430–444. [Google Scholar] [CrossRef]
- Davis, P.; Dove, M.; Stockel, C. A computer simulation of marine traffic using domains and arenas. J. Navig. 1980, 33, 215–222. [Google Scholar] [CrossRef]
- Zhou, J.; Wang, C.; Zhang, A.A. COLREGs-based dynamic navigation safety domain for unmanned surface vehicles: A case study of Dolphin-I. J. Mar. Sci. Eng. 2020, 8, 264. [Google Scholar] [CrossRef]
- Wang, N. An intelligent spatial collision risk based on the quaternion ship domain. J. Navig. 2010, 63, 733–749. [Google Scholar] [CrossRef]
- Zheng, K.; Chen, Y.; Jiang, Y.; Qiao, S. A SVM based ship collision risk assessment algorithm. Ocean Eng. 2020, 202, 107062. [Google Scholar] [CrossRef]
- Patle, B.K.; Ganesh, B.L.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Shi, J.H.; Liu, Z.J. Deep Learning in Unmanned Surface Vehicles Collision-Avoidance Pattern Based on AIS Big Data with Double GRU-RNN. J. Mar. Sci. Eng. 2020, 8, 682. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Qu, D.; Ke, J.; Li, X.M. Dynamic obstacle avoidance of unmanned surface vehicle based on speed obstacle method and dynamic window method. J. Shanghai Univ. 2017, 23, 1–16. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe maritime navigation with COLREGs using velocity obstacles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 3–8 November 2011. [Google Scholar]
- Larson, J.; Bruch, M.; Ebken, J. Autonomous navigation and obstacle avoidance for unmanned surface vehicles. In Proceedings of the SPIE 6230, Unmanned Systems Technology VIII, Orlando, FL, USA, 18–20 April 2006. [Google Scholar]
- Song, L.; Su, Y.; Dong, Z.; Shen, W.; Xiang, Z.; Mao, P. A two-level dynamic obstacle avoidance algorithm for unmanned surface vehicles. Ocean. Eng. 2018, 170, 351–360. [Google Scholar] [CrossRef]
- Moe, S.; Teel, A.R.; Antonelli, G.; Pettersen, K.Y. Experimental results for set-based control within the singularity-robust multiple task-priority invers kinematics. In Proceedings of the 2015 IEEE Conference on Robotics and Biomimetics, Zhuhai, China, 6–9 December 2015. [Google Scholar]
- Moe, S.; Teel, A.R.; Antonelli, G.; Pettersen, K.Y. Stability analysis for set-based control within the singularity-robust multiple task-priority inverse kinematics framework. In Proceedings of the 2015 IEEE 54th Annual Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Li, C.; Jiang, J.; Duan, F.; Liu, W.; Wang, X.; Bu, L.; Sun, Z.; Yang, G. Modeling and Experimental Testing of an Unmanned Surface Vehicle with Rudderless Double Thrusters. Sensors 2019, 19, 2051. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Chichester, UK, 2011; pp. 52–59. [Google Scholar]
- Goodwin, E.M. A statistical study of ship domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Wang, N. A novel analytical framework for dynamic quaternion ship domains. J. Navig. 2013, 66, 265–281. [Google Scholar] [CrossRef]
- Kijima, K.; Furukawa, Y. Automatic collision avoidance system using the concept of blocking area. In Proceedings of the IFAC Manoeuvring and Control of Marine Craft, Girona, Spain, 17–19 September 2003. [Google Scholar]
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-varing Disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P.; Pan, J. Universal controllers for stabilization and tracking of underactuated ships. Syst. Control. Lett. 2002, 47, 299–317. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 0 | kg | −3224 | kg·m/s | ||
| 0 | kg | −315 | kg/m | ||
| 0 | kg·m | −2000 | kg/s | ||
| 0 | kg·m | 0 | kg·m | ||
| 0 | kg·m | 0 | kg/(m·s)2 | ||
| −50 | kg/s | 0 | kg/(m·s)2 | ||
| −200 | kg/s | −3224 | kg/(m·s)2 | ||
| 0 | kg·m/s | m | 3980 | kg | |
| 0 | kg·m/s | 19,703 | kg·m |
| Simulation Scene | Vessel | Starting Point | Destination | Velocity (m/s) | Heading (deg) | |
|---|---|---|---|---|---|---|
| Signal TS | Overtaking | OS | 15 | 0 | ||
| TS | − | 2 | 73 | |||
| Head-on | OS | 15 | 0 | |||
| TS | − | 8 | 250 | |||
| Crossing | OS | 15 | 0 | |||
| TS | − | 8 | 315 | |||
| Multiple TSs | OS | 15 | 0 | |||
| TS1 | − | 8 | 315 | |||
| TS2 | − | 6 | 250 | |||
| TS3 | − | 2 | 73 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, F.; Jin, L.; Hou, X.; Wang, L.; Li, B.; Yang, H. COLREGs: Compliant Dynamic Obstacle Avoidance of USVs Based on the Dynamic Navigation Ship Domain. J. Mar. Sci. Eng. 2021, 9, 837. https://doi.org/10.3390/jmse9080837
Deng F, Jin L, Hou X, Wang L, Li B, Yang H. COLREGs: Compliant Dynamic Obstacle Avoidance of USVs Based on the Dynamic Navigation Ship Domain. Journal of Marine Science and Engineering. 2021; 9(8):837. https://doi.org/10.3390/jmse9080837
Chicago/Turabian StyleDeng, Fang, Leilei Jin, Xiuhui Hou, Longjin Wang, Boyang Li, and Hualin Yang. 2021. "COLREGs: Compliant Dynamic Obstacle Avoidance of USVs Based on the Dynamic Navigation Ship Domain" Journal of Marine Science and Engineering 9, no. 8: 837. https://doi.org/10.3390/jmse9080837