
Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods


Abstract
:1. Introduction
2. Literature Review
2.1. Global Path Planning
2.2. Local Path Planning
3. Methodology
3.1. Methodological Overview of the Research
3.2. Artificial Potential Field Method
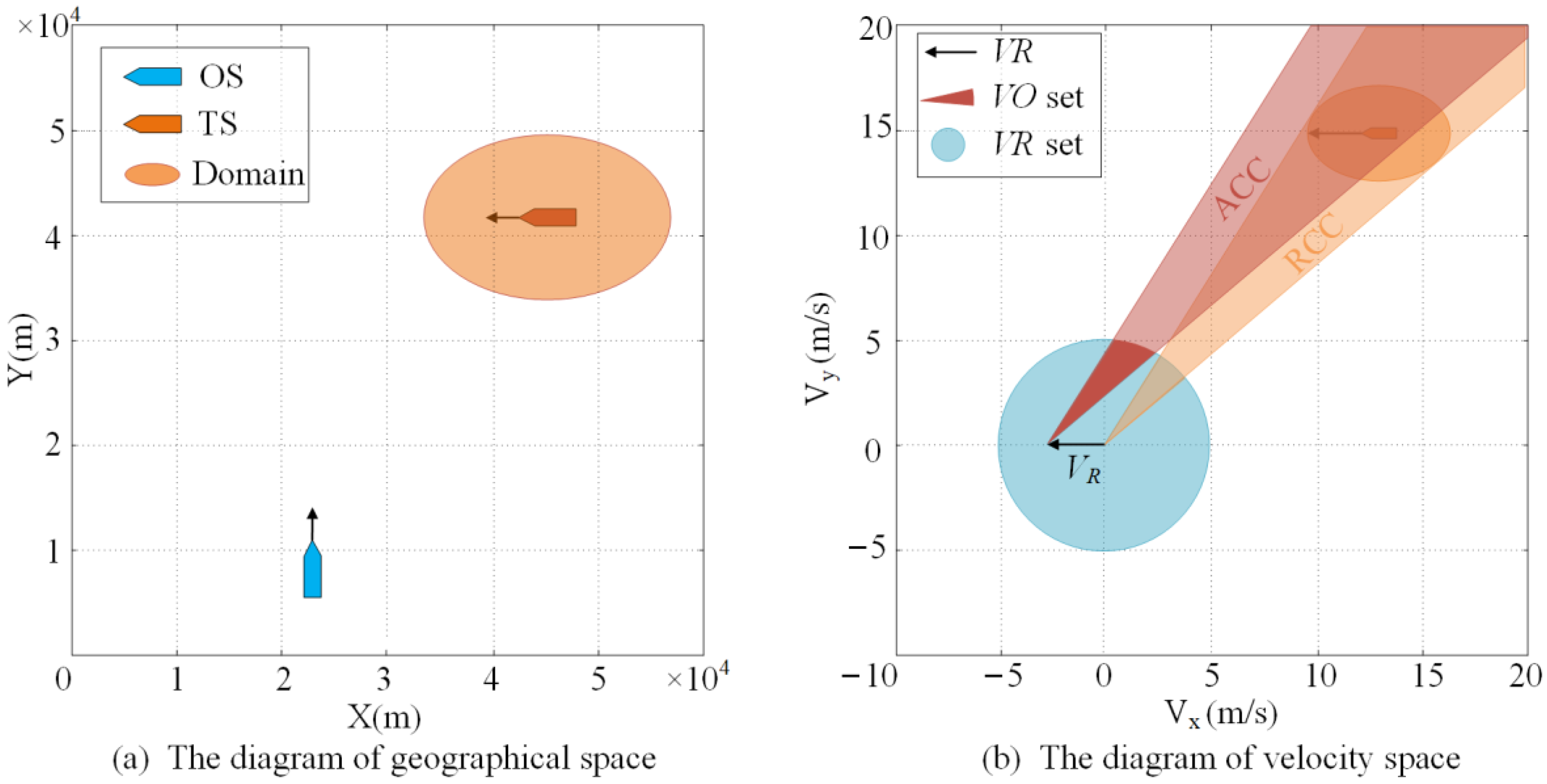
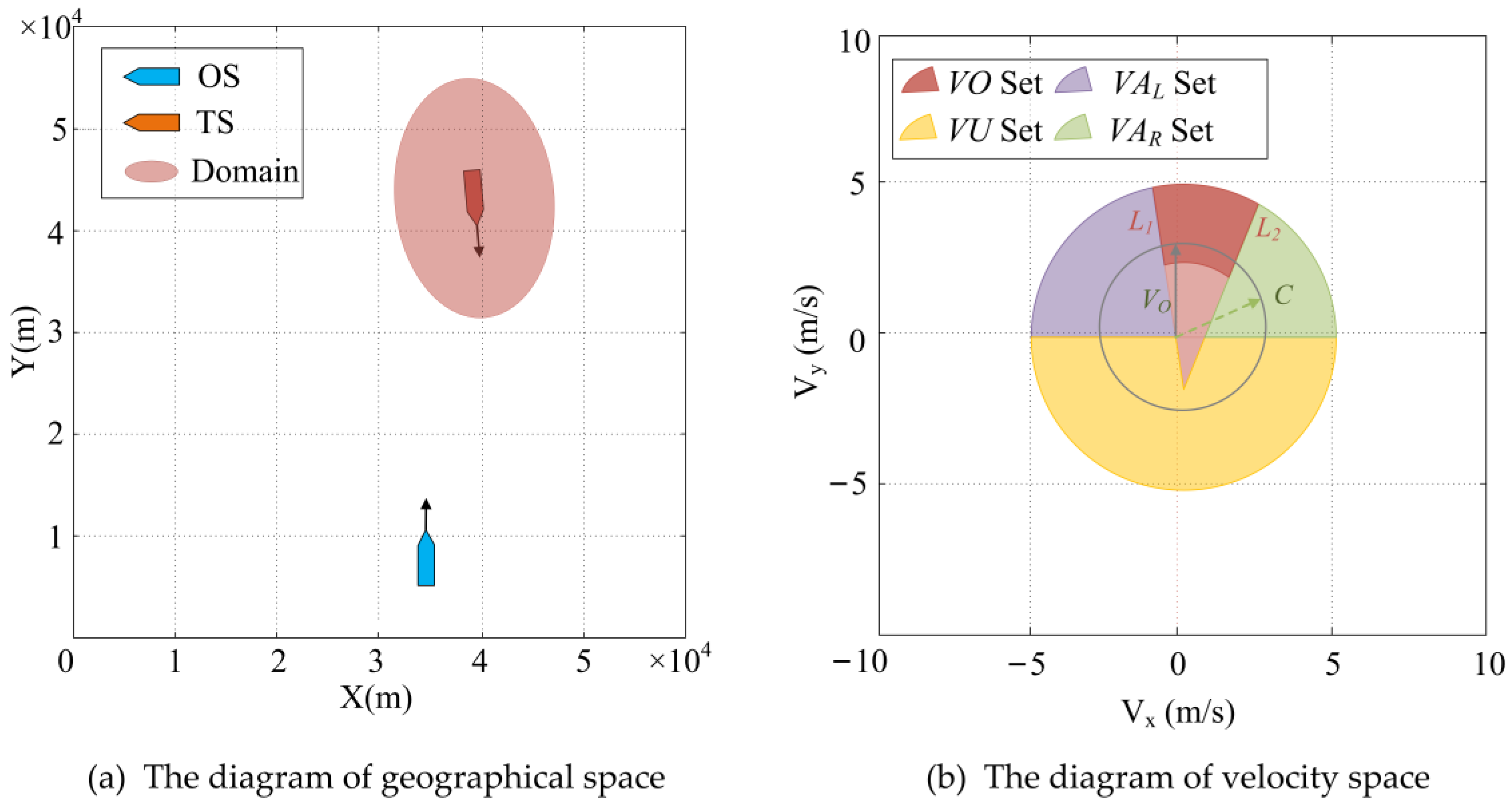
3.3. Velocity Obstacles Method
3.4. Ship Motion and Control Models
4. Model Design
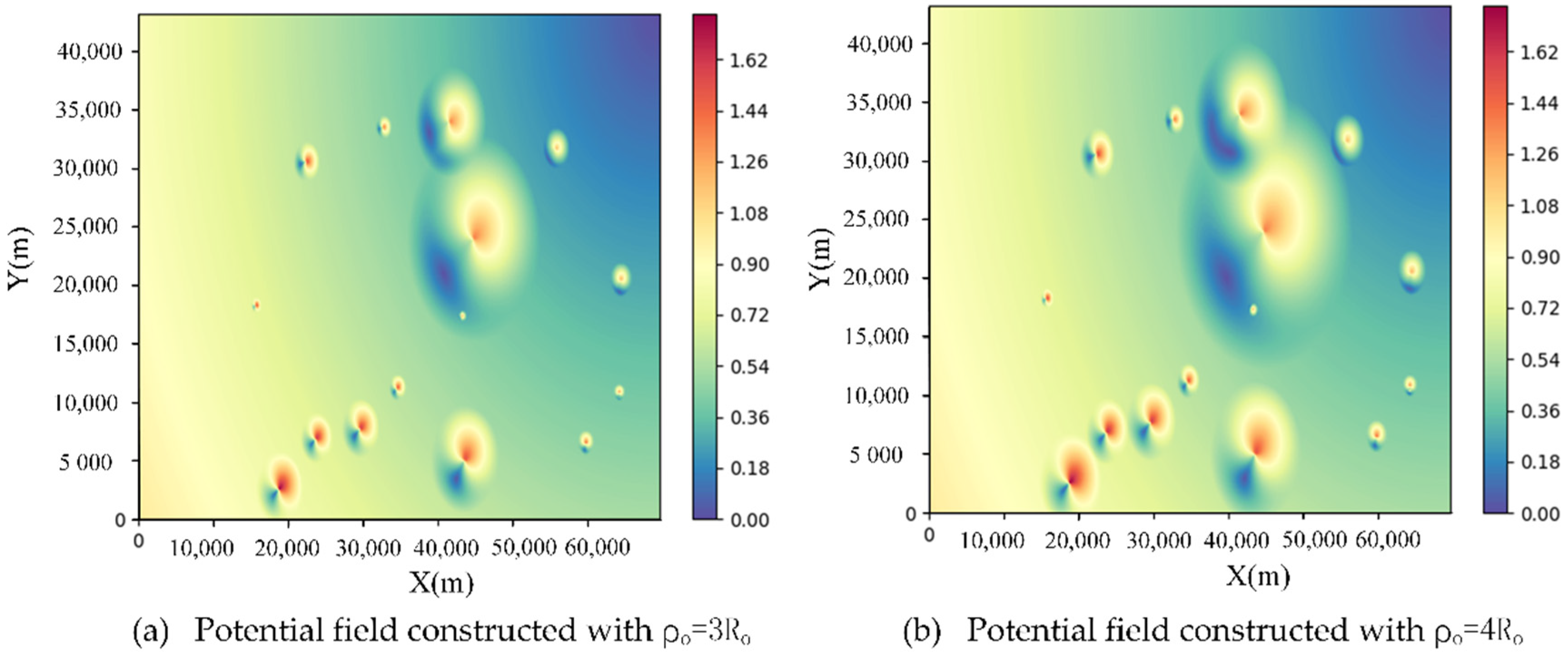
4.1. Map Construction
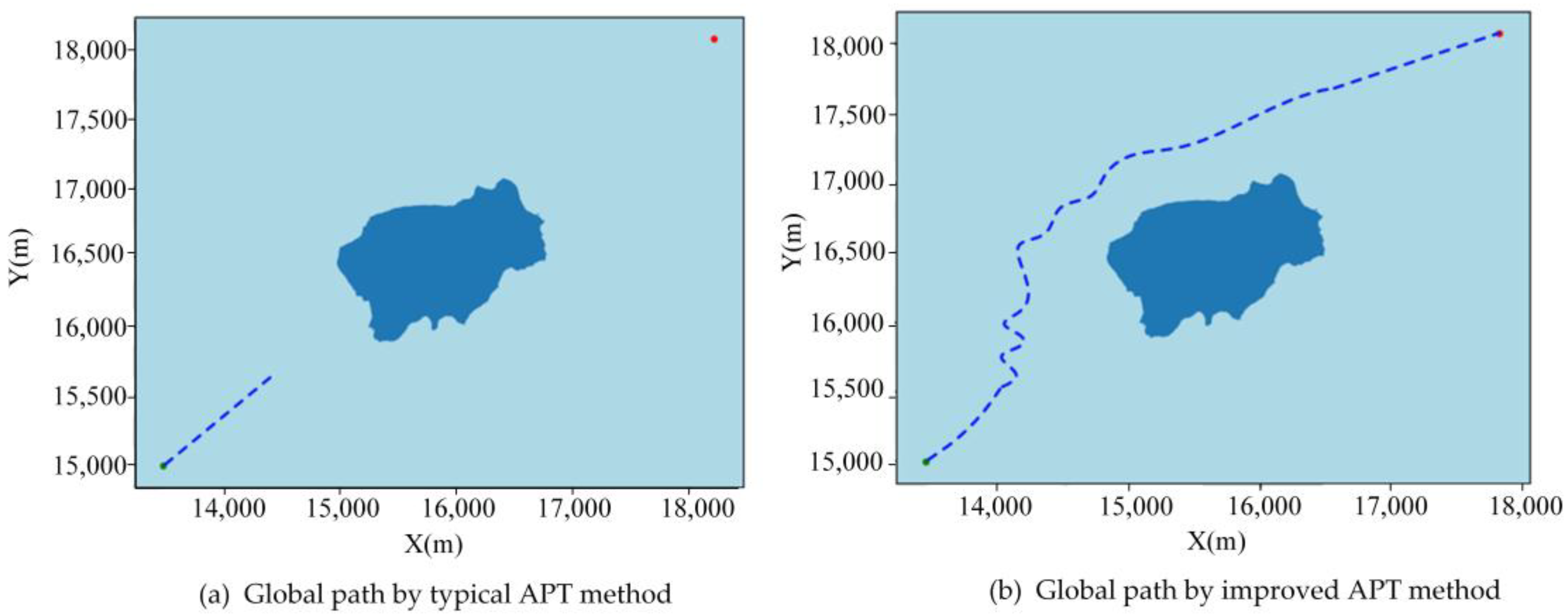
4.2. Global Path Planning with Improved APF Method
| Algorithm 1. The pseudocode of the DP: pls(T,ε) | |
| 1 | end = len(T) |
| 2 | dmax = 0 |
| 3 | imax = 0 |
| 4 | for i in range(2,end): |
| 5 | d = E(T(i), T(1), T(end)) |
| 6 | If d > ε: |
| 7 | imax = i |
| 8 | dmax = d |
| 9 | if dmax > ε: |
| 10 | A = DP(T(1,imax), ε) |
| 11 | B = DP(T(imax,end), ε) |
| 12 | else: |
| 13 | return T(1,end) |
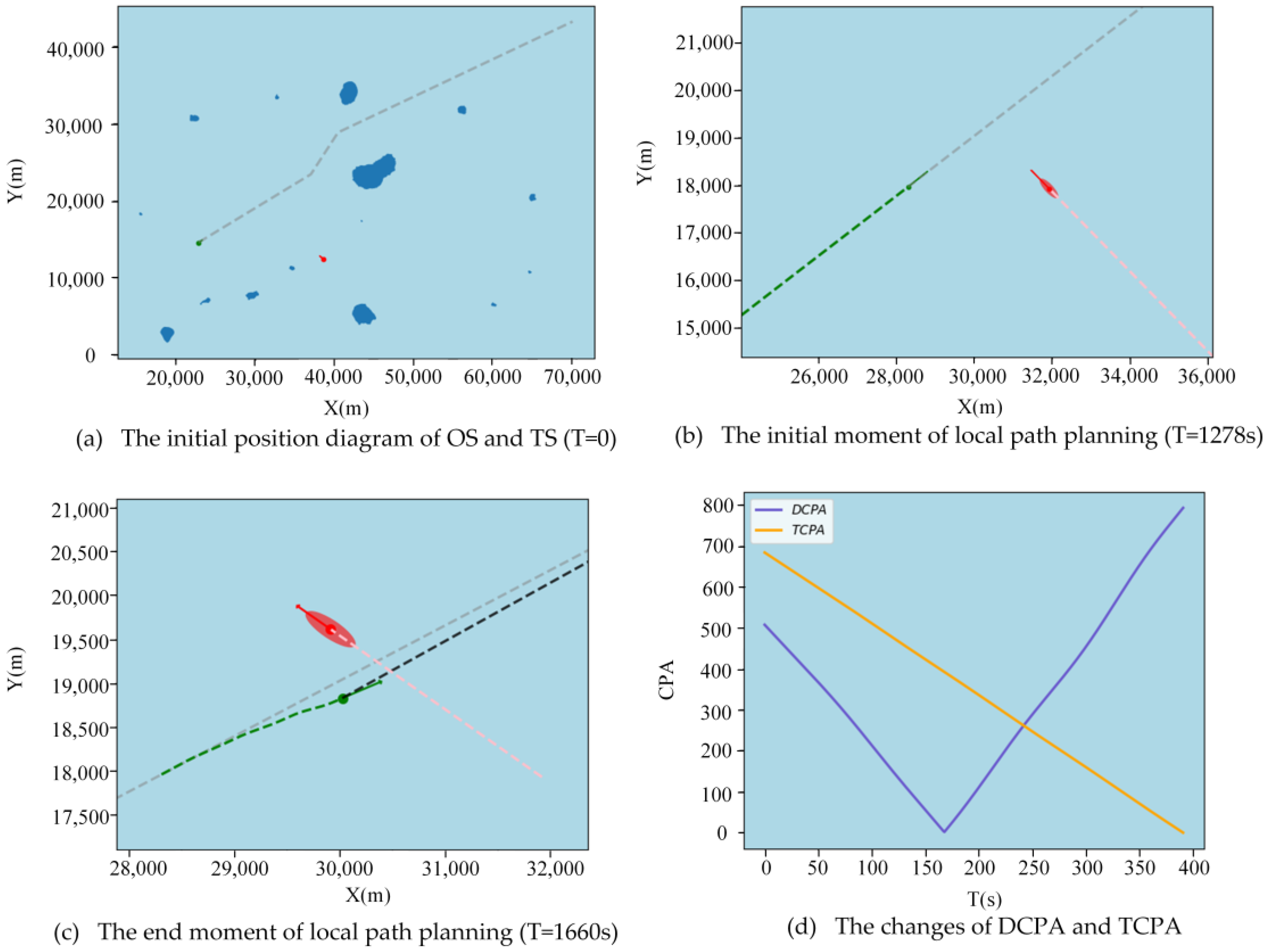
4.3. Local Path Planning with Modified VO Method
5. Case Study
5.1. Case Design
5.2. Map Construction
5.3. Global Path Planning
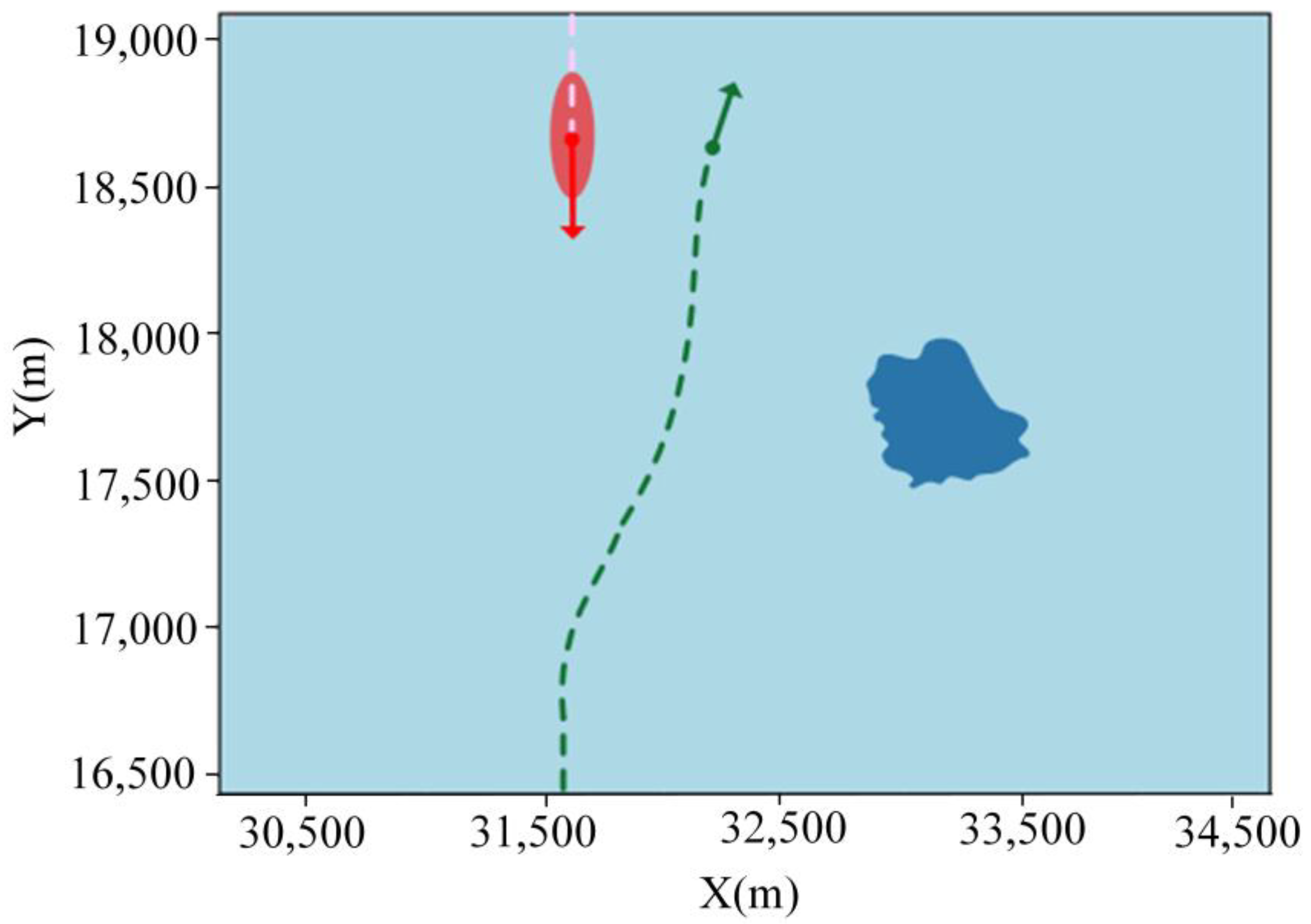
5.4. Local Path Planning
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, P.F.; Huang, Y.M.; Papadimitriou, E.; Mou, J.M.; van Gelder, P.H.A.J.M. An improved time discretized non-linear velocity obstacle method for multi-ship encounter detection. Ocean Eng. 2020, 196, 106718. [Google Scholar] [CrossRef]
- He, J.; Hao, Y.; Wang, X.Q. An interpretable aid decision-making model for flag state control ship detention based on SMOTE and XGBoost. J. Mar. Sci. Eng. 2021, 9, 156. [Google Scholar] [CrossRef]
- Li, M.X.; Mou, J.M.; He, Y.X.; Chen, L.Y.; Huang, Y.M. A rule-aware time-varying conflict risk measure for MASS considering maritime practice. Reliab. Eng. Syst. Saf. 2021, 215, 107816. [Google Scholar] [CrossRef]
- Li, M.X.; Mou, J.M.; Chen, L.Y.; Huang, Y.M.; Chen, P.F. Comparison between the collision avoidance decision-making in theoretical research and navigation practices. Ocean Eng. 2021, 228, 108881. [Google Scholar] [CrossRef]
- Yan, X.P.; Wang, S.W.; Ma, F.; Liu, Y.C.; Wang, J. A novel path planning approach for smart cargo ships based on anisotropic fast marching. Expert Syst. Appl. 2020, 159, 113558. [Google Scholar] [CrossRef]
- Chen, P.F.; Huang, Y.M.; Eleonora, P.; Mou, J.M.; van Gelder, P.H.A.J.M. Global path planning for autonomous ship: A hybrid approach of fast marching square and velocity obstacles methods. Ocean Eng. 2020, 214, 107793. [Google Scholar] [CrossRef]
- Marin-Plaza, P.; Hussein, A.; Martin, D.; Escalera, A.D.L. Global and local path planning study in a ROS-based research platform for autonomous vehicles. J. Adv. Transp. 2018, 2018, 6392697. [Google Scholar] [CrossRef]
- Sarkar, R.; Barman, D.; Chowdhury, N. Domain knowledge based genetic algorithms for mobile robot path planning having single and multiple targets. J. King Saud Univ. Comput. Inf. Sci. 2020. [Google Scholar] [CrossRef]
- Yu, X.B.; Li, C.L.; Yen, G.G. A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management. Appl. Soft Comput. 2021, 98, 106857. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Lyu, D.S.; Chen, Z.W.; Cai, Z.S.; Piao, S.H. Robot path planning by leveraging the graph-encoded floyd algorithm. Future Gener. Comput. Syst. 2021, 122, 204–208. [Google Scholar] [CrossRef]
- Mou, J.M.; Li, M.X.; Hu, W.X.; Zhang, X.H.; Gong, S.; Chen, P.F.; Huang, Y.X. Mechanism of dynamic automatic collision avoidance and the optimal route in multi-ship encounter situations. J. Mar. Sci. Technol. 2020, 26. [Google Scholar] [CrossRef]
- Premachandra, C.; Murakami, M.; Gohara, R.; Ninomiya, T.; Kato, K. Improving landmark detection accuracy for self-localization through baseboard recognition. Int. J. Mach. Learn. Cybern. 2017, 8, 1815–1826. [Google Scholar] [CrossRef]
- Xie, L.; Xue, S.F.; Zhang, J.F.; Zhang, M.Y.; Tian, W.L.; Haugen, S. A path planning approach based on multi-direction A* algorithm for ships navigating within wind farm waters. Ocean Eng. 2019, 184, 311–322. [Google Scholar] [CrossRef]
- Singh, Y.G.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef] [Green Version]
- Topaj, A.G.; Tarovik, O.V.; Bakharev, A.A.; Kondratenko, A.A. Optimal ice routing of a ship with icebreaker assistance. Appl. Ocean Res. 2019, 86, 177–187. [Google Scholar] [CrossRef]
- Guo, H.; Mao, Z.Y.; Ding, W.J.; Liu, P.L. Optimal search path planning for unmanned surface vehicle based on an improved genetic algorithm. Comput. Electr. Eng. 2019, 79, 106467. [Google Scholar] [CrossRef]
- Lim, H.S.; Fan, S.S.; Chin, H.K.H.; Chai, S.H.; Bose, N.; Kim, E. Constrained path planning of autonomous underwater vehicle using selectively-hybridized particle swarm optimization algorithms. IFAC-Pap. 2019, 52, 315–322. [Google Scholar] [CrossRef]
- Candeloro, M.; Lekkas, A.M.; Sørensen, A.J. A voronoi-diagram-based dynamic path-planning system for underactuated marine vessels. Control Eng. Pract. 2017, 61, 41–54. [Google Scholar] [CrossRef]
- Niu, H.L.; Savvaris, A.; Tsourdos, A.; Ji, Z. Voronoi-visibility roadmap-based path planning algorithm for unmanned Surface vehicles. J. Navig. 2019, 72, 850–874. [Google Scholar] [CrossRef]
- Chang, K.Y.; Jan, G.E.; Su, C.M.; Parberry, L. Optimal interceptions on two-dimensional grids with obstacles. J. Navig. 2008, 61, 31–43. [Google Scholar] [CrossRef]
- Wang, D.; Wang, P.; Zhang, X.; Guo, X.; Shu, Y.; Tian, X. An obstacle avoidance strategy for the wave glider based on the improved artificial potential field and collision prediction model. Ocean Eng. 2020, 206, 107356. [Google Scholar] [CrossRef]
- Shin, Y.; Kim, E. Hybrid path planning using positioning risk and artificial potential fields. Aerosp. Sci. Technol. 2021, 112, 106640. [Google Scholar] [CrossRef]
- Nakajima, K.; Premachandra, C.; Kato, K. 3D environment mapping and self-position estimation by a small flying robot mounted with a movable ultrasonic range sensor. J. Electr. Syst. Inf. Technol. 2017, 4, 289–298. [Google Scholar] [CrossRef]
- Demirhan, M.; Premachandra, C. Development of an automated camera-based drone landing system. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Premachandra, C.; Thanh, D.N.H.; Kimura, T.; Kawanaka, H. A study on hovering control of small aerial robot by sensing existing floor features. IEEE/CAA J. Autom. Sin. 2020, 7, 1016–1025. [Google Scholar] [CrossRef]
- Guo, S.Q.; Mou, J.M.; Chen, L.Y.; Chen, P.F. Improved kinematic interpolation for AIS trajectory reconstruction. Ocean Eng. 2021, 234, 109256. [Google Scholar] [CrossRef]
- Wang, X.Y.; Feng, K.; Wang, G.; Wang, Q.Z. Local path optimization method for unmanned ship based on particle swarm acceleration calculation and dynamic optimal control. Appl. Ocean Res. 2021, 110, 102588. [Google Scholar] [CrossRef]
- Yang, R.W.; Xu, J.S.; Wang, X.; Zhou, Q. Parallel trajectory planning for shipborne Autonomous collision avoidance system. Appl. Ocean Res. 2019, 91, 101875. [Google Scholar] [CrossRef]
- He, Y.X.; Jin, Y.; Huang, L.W.; Xiong, Y.; Chen, P.F.; Mou, J.M. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea. Ocean Eng. 2017, 140, 281–291. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- De Vries, G.K.D.; Van Someren, M. Machine learning for vessel trajectories using compression, alignments and domain knowledge. Expert Syst. Appl. 2012, 39, 13426–13439. [Google Scholar] [CrossRef]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles International. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Chen, P.F.; Li, M.X.; Mou, J.M. A velocity obstacle-based real-time regional ship collision risk analysis method. J. Mar. Sci. Eng. 2021, 9, 428. [Google Scholar] [CrossRef]
- Abkowitz, M.A. Lectures on Ship Hydrodynamics–Steering and Maneuverability; Report Hy-5; Hydro–og Aeordynamisk Laboratorium: Lyngby, Denmark, 1964. [Google Scholar]
- Zhang, C.L.; Liu, X.J.; Wan, D.C.; Wang, J.B. Experimental and numerical investigations of advancing speed effects on hydrodynamic derivatives in MMG model, part I: Xvv,Yv,Nv. Ocean Eng. 2019, 179, 67–75. [Google Scholar] [CrossRef]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control, 1st ed.; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Configuration |
|---|---|
| Boundary: | Latitude: 10.9391° N to 11.2667° N Longitude: 120.71° E to121.1543° E |
| Start point: | 120.762° E/11.071° N |
| End point: | 121.191° E/11.328° N |
| Origin of coordinate: | 120.71° E/10.9391° N |
| Ship | Location | Speed (m/s) | Course (°) | Situation |
|---|---|---|---|---|
| OS | 120.762° E/11.071° N | 5 | 57 | |
| TS1 | 120.872° E/11.138° N | 5 | 237 | Head-on |
| TS2 | 120.905° E/11.051° N | 6.7 | 167 | Crossing |
| TS3 | 120.825° E/11.109° N | 2 | 57 | Overtaking |
| Circles | Location (m) | Ro(m) | Circles | Location (m) | Ro (m) |
|---|---|---|---|---|---|
| Cir01 | (15,703, 18,214) | 208 | Cir09 | (43,259, 17,334) | 148 |
| Cir02 | (18,838, 2589) | 1037 | Cir10 | (43,597, 5022) | 1525 |
| Cir03 | (22,404, 30,503) | 572 | Cir11 | (44,764, 23,965) | 2960 |
| Cir04 | (23,747, 6842) | 713 | Cir12 | (55,805, 31,632) | 578 |
| Cir05 | (29,629, 7694) | 834 | Cir13 | (59,791, 6447) | 348 |
| Cir06 | (32,730, 33,453) | 338 | Cir14 | (64,252, 10,445) | 18 |
| Cir07 | (34,584, 11,164) | 373 | Cir15 | (64,276, 10,743) | 235 |
| Cir08 | (41,623, 33,910) | 1589 | Cir16 | (64,508, 20,377) | 482 |
| Item | Start Point (m) | End Point (m) | λ | μ | ε (m) | Step (m) | |
|---|---|---|---|---|---|---|---|
| Typical APF | (28,419, 3016) | (53,046, 39,336) | 1 | 1 × 105 | 3Ro/4Ro | / | 200 |
| Improved APF | (28,419, 3016) | (53,046, 39,336) | 1 | 1 × 105 | 3Ro/4Ro | 500 | 200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Mou, J.; Chen, P.; Li, M. Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods. J. Mar. Sci. Eng. 2021, 9, 761. https://doi.org/10.3390/jmse9070761
Zhang L, Mou J, Chen P, Li M. Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods. Journal of Marine Science and Engineering. 2021; 9(7):761. https://doi.org/10.3390/jmse9070761
Chicago/Turabian StyleZhang, Liang, Junmin Mou, Pengfei Chen, and Mengxia Li. 2021. "Path Planning for Autonomous Ships: A Hybrid Approach Based on Improved APF and Modified VO Methods" Journal of Marine Science and Engineering 9, no. 7: 761. https://doi.org/10.3390/jmse9070761