Investigation on Hydrodynamic Performance of Flapping Foil Interacting with Oncoming Von Kármán Wake of a D-Section Cylinder


Abstract
:1. Introduction
2. Computational Approach
2.1. Problem Formulation
2.2. Numerical Method
3. Validation of the Numerical Method
4. Results and Discussion
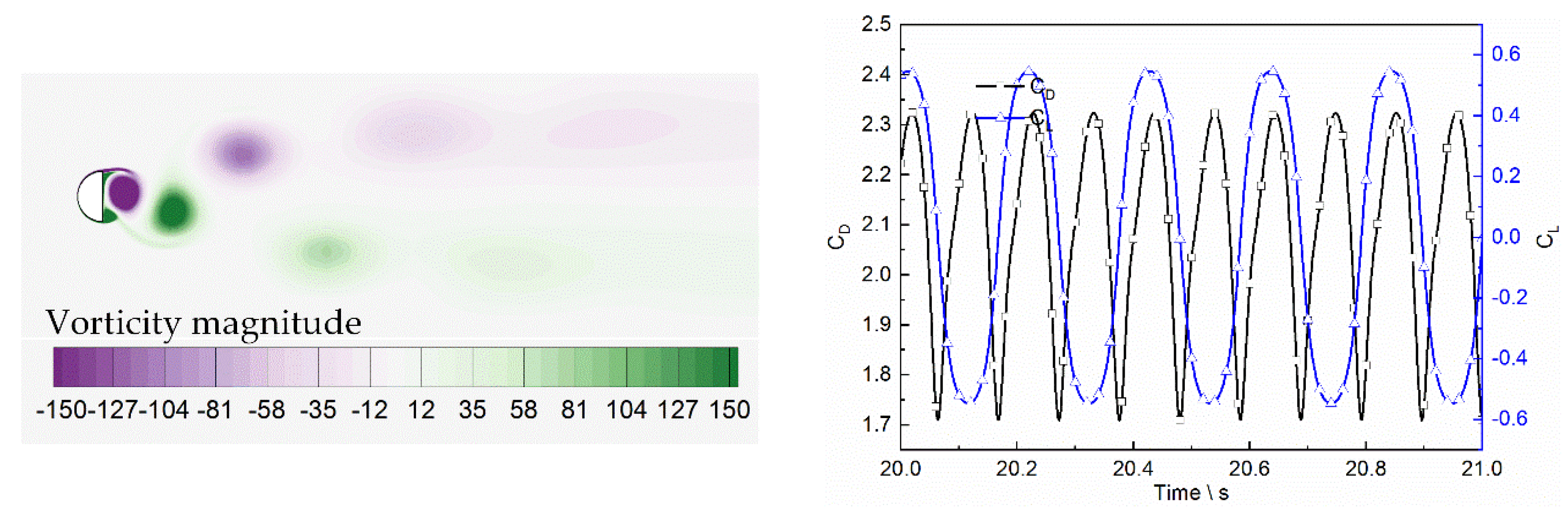
4.1. The Original Flapping Foil Motion and Flow Field of the D-Section Cylinder
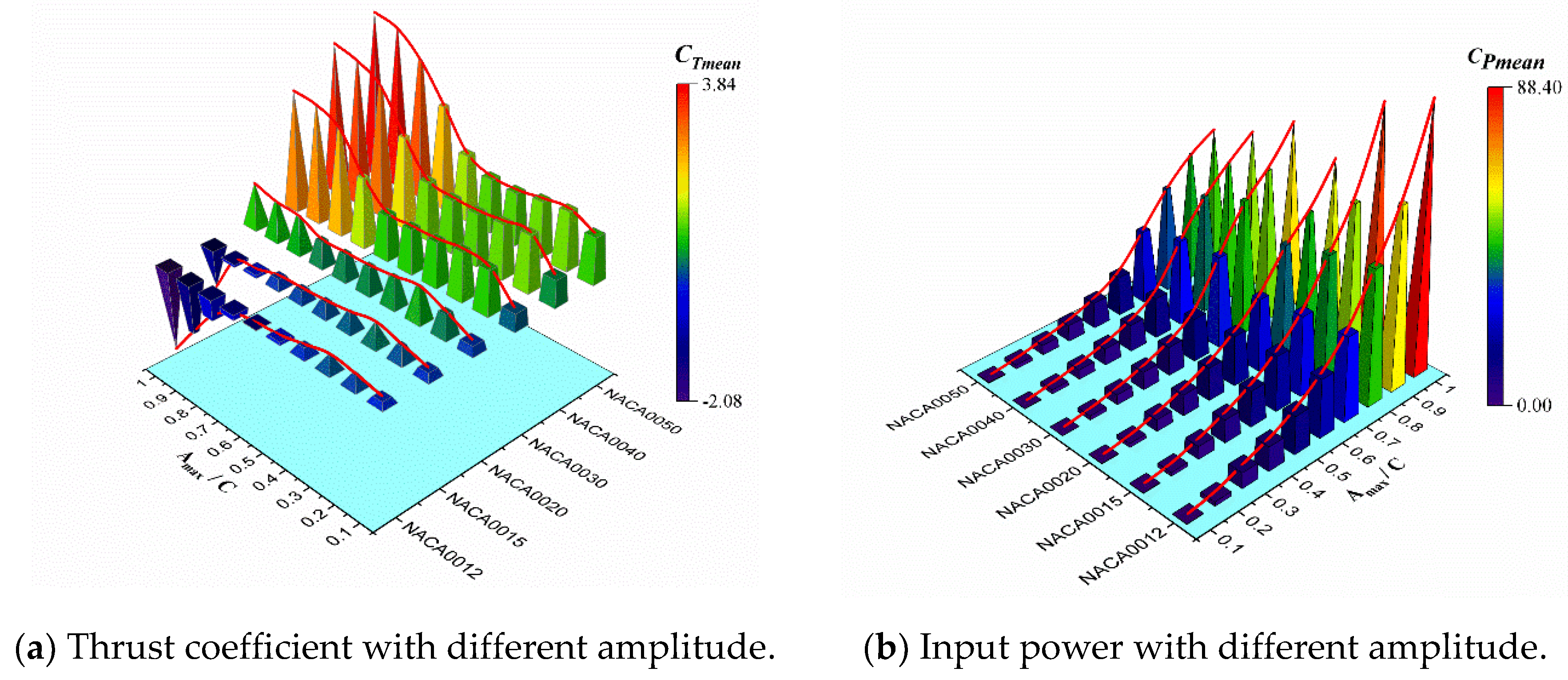
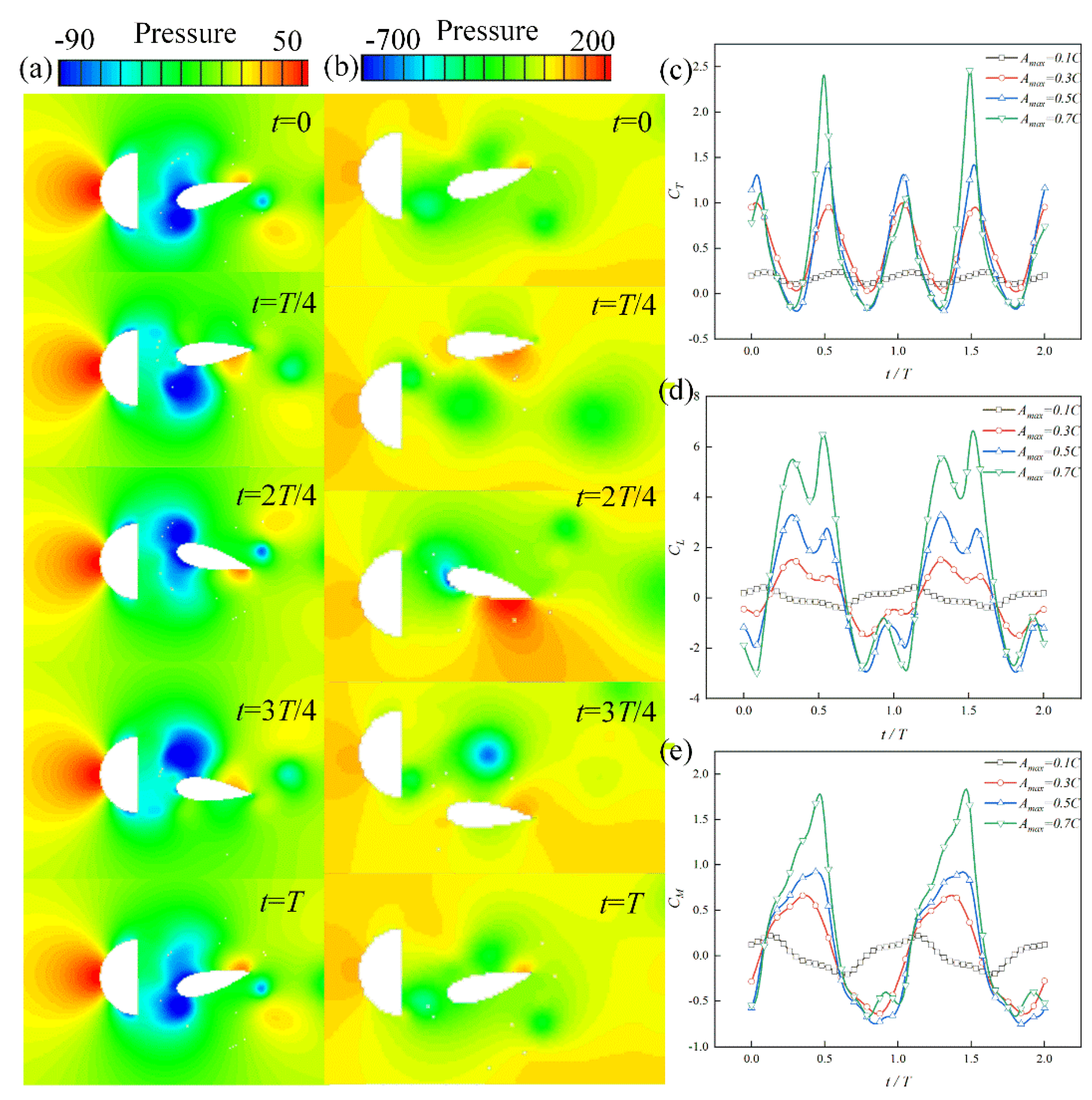
4.2. Effect of Heaving Amplitude and Thickness
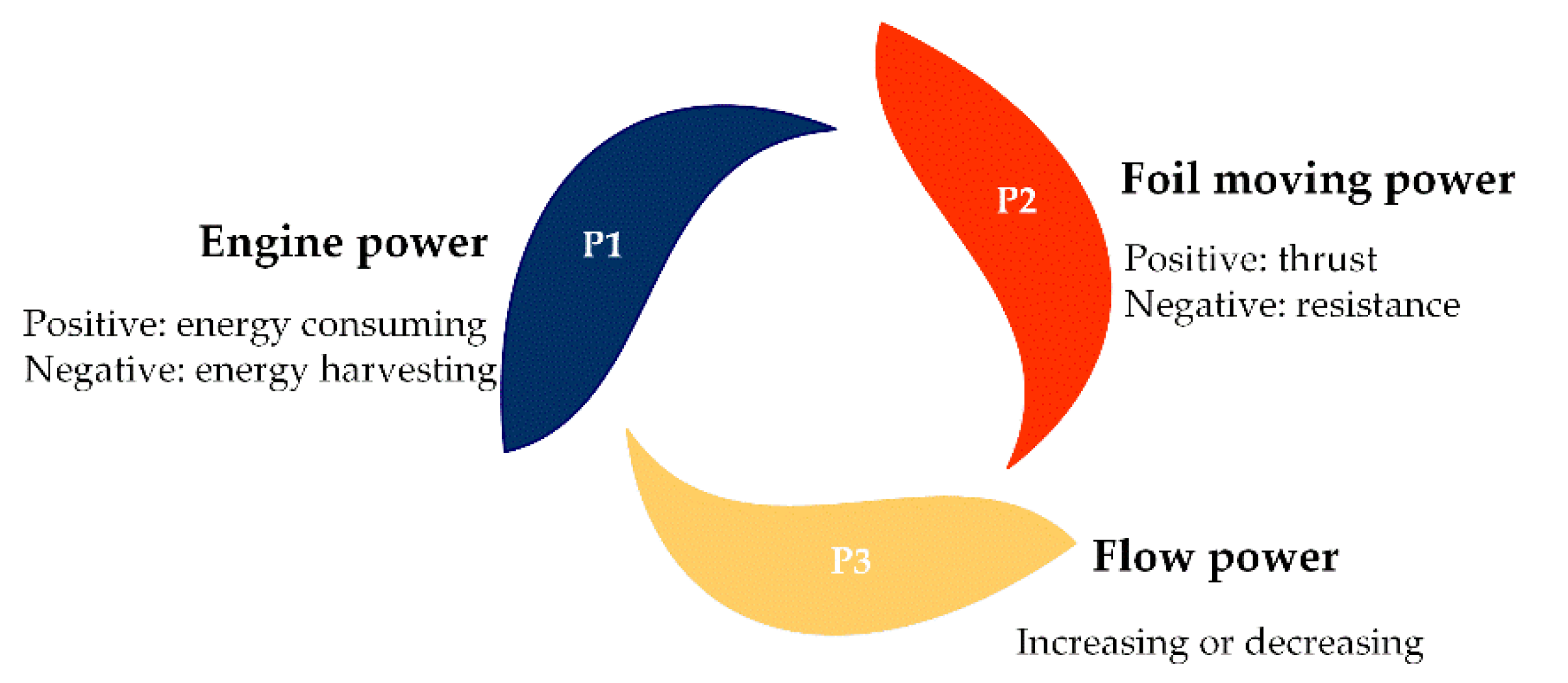
4.3. Definition of the Energy Transforming Ratio
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bockmann, E.; Steen, S. Experiments with actively pitch-controlled and spring-loaded oscillating foils. Appl. Ocean. Res. 2014, 48, 227–235. [Google Scholar] [CrossRef]
- Cheng, H.K.; Murillo, L.E. Lunate-tail swimming propulsion as a problem of curved lifting line in unsteady flow. 1: Asymptotic theory. J. Fluid Mech. 1984, 143, 327–350. [Google Scholar] [CrossRef]
- Thaweewat, N.; Phoemsapthawee, S.; Juntasaro, V. Semi-active flapping foil for marine propulsion. Ocean. Eng. 2018, 147, 556–564. [Google Scholar] [CrossRef]
- Liu, P.; Liu, Y.; Huang, S.; Zhao, J.; Su, Y. Effects of regular waves on propulsion performance of flexible flapping foil. Appl. Sci. 2018, 8, 934. [Google Scholar] [CrossRef] [Green Version]
- Politis, G.K.; Tsarsitalidis, V.T. Flapping wing propulsor design: An approach based on systematic 3D-BEM simulations. Ocean. Eng. 2014, 84, 98–123. [Google Scholar] [CrossRef]
- Lin, X.; Wu, J.; Zhang, T.; Yang, L. Phase difference effect on collective locomotion of two tandem autopropelled flapping foils. Phys. Rev. 2019, 4, 54–101. [Google Scholar] [CrossRef]
- Ashraf, M.A.; Young, J.; Lai, J.C.S. Reynolds number, thickness and camber effects on flapping airfoil propulsion. J. Fluids Struct. 2011, 27, 145–160. [Google Scholar] [CrossRef]
- Andersen, A.; Bohr, T.; Schnipper, T.; Walther, J.H. Wake structure and thrust generation of a flapping foil in two-dimensional flow. J. Fluid Mech. 2017, 812, R4. [Google Scholar] [CrossRef] [Green Version]
- Das, A.; Shukla, R.K.; Govardhan, R.N. Existence of a sharp transition in the peak propulsive efficiency of a low-Re pitching foil. J. Fluid Mech. 2016, 800, 307–326. [Google Scholar] [CrossRef]
- Zhang, J. Footprints of a flapping wing. J. Fluid Mech. 2017, 818, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Liao, Q.; Dong, G.J.; Lu, X.Y. Vortex formation and force characteristics of a foil in the wake of a circular cylinder. J. Fluids Struct. 2004, 19, 491–510. [Google Scholar] [CrossRef]
- Chen, Y.; Nan, J.; Wu, J. Wake effect on a semi-active flapping foil based energy harvester by a rotating foil. Comput. Fluids 2018, 160, 51–63. [Google Scholar] [CrossRef]
- Liu, W. A case study on tandem configured oscillating foils in shallow water. Ocean. Eng. 2017, 144, 351–361. [Google Scholar] [CrossRef] [Green Version]
- Ma, P.; Wang, Y.; Xie, Y.; Huo, Z. Numerical analysis of a tidal current generator with dual flapping wings. Energy 2018, 155, 1077–1089. [Google Scholar] [CrossRef]
- Alaminos-Quesada, J.; Fernandez-Feria, R. Aerodynamics of heaving and pitching foils in tandem from linear potential theory. AIAA J. 2020, 58, 27–42. [Google Scholar] [CrossRef]
- Arranz, G.; Flores, O.; Garcia-Villalba, M. Three-dimensional effects on the aerodynamic performance of flapping wings in tandem configuration. J. Fluids Struct. 2020, 94, 102893. [Google Scholar] [CrossRef]
- Muscutt, L.E.; Weymouth, G.D.; Ganapathisubramani, B. Performance augmentation mechanism of in-line tandem flapping foils. J. Fluid Mech. 2017, 827, 484–505. [Google Scholar] [CrossRef] [Green Version]
- Streitlien, K.; Triantafyllou, G.S.; Triantafyllou, M.S. Efficient foil propulsion through vortex control. AIAA J. 1996, 34, 2315–2319. [Google Scholar] [CrossRef]
- Bao, Y.; Tao, J. Dynamic reactions of a free-pitching foil to the reverse Karman vortices. Phys. Fluids 2014, 26, 031704. [Google Scholar] [CrossRef]
- Beal, D.N.; Hover, F.S.; Triantafyllou, M.S.; Liao, J.C.; Lauder, G.V. Passive propulsion in vortex wakes. J. Fluid Mech. 2006, 549, 385–402. [Google Scholar] [CrossRef] [Green Version]
- Lefebvre, J.N.; Jones, A.R. Experimental investigation of airfoil performance in the wake of a circular cylinder. AIAA J. 2019, 57, 2808–2818. [Google Scholar] [CrossRef]
- Du, X.X.; Zhang, Z.D. Numerical analysis of influence of four flapping modes on propulsion performance of underwater flapping foils. Eng. Mech. 2018, 35, 249–256. [Google Scholar]
- Lu, K.; Xie, Y.H.; Zhang, D. Numerical study of large amplitude, nonsinusoidal motion and camber effects on pitching airfoil propulsion. J. Fluids Struct. 2013, 36, 184–194. [Google Scholar] [CrossRef]
- Wang, J.; Liu, P.; Chin, C.; He, G. Numerical investigation of auto-pitch wing-in-ground effect oscillating foil propulsor. Appl. Ocean. Res. 2019, 89, 71–84. [Google Scholar] [CrossRef]
- Anderson, J.M.; Streitlien, K.; Barrett, D.S.; Triantafyllou, M.S. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef] [Green Version]
- Chao, L.-M.; Pan, G.; Zhang, D.; Yan, G.-X. Numerical investigations on the force generation and wake structures of a nonsinusoidal pitching foil. J. Fluids Struct. 2019, 85, 27–39. [Google Scholar] [CrossRef]
- Kinsey, T.; Dumas, G. Parametric study of an oscillating airfoil in a power-extraction regime. AIAA J. 2008, 46, 1318–1330. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Y+ | 5 | 2 | 1 | 0.9 | 0.85 | 0.8 |
| Size | 150,000 | 230,000 | 270,000 | 360,000 | 380,000 | 410,000 |
| 52.0207 | 52.5885 | 52.9898 | 53.0229 | 53.0165 | 53.0163 | |
| Δ | 1.09% | 0.76% | 0.06% | 0.01% | 0.00004% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, P.; An, X.; Lyu, D.; He, R.; Zhang, B. Investigation on Hydrodynamic Performance of Flapping Foil Interacting with Oncoming Von Kármán Wake of a D-Section Cylinder. J. Mar. Sci. Eng. 2021, 9, 658. https://doi.org/10.3390/jmse9060658
Li J, Wang P, An X, Lyu D, He R, Zhang B. Investigation on Hydrodynamic Performance of Flapping Foil Interacting with Oncoming Von Kármán Wake of a D-Section Cylinder. Journal of Marine Science and Engineering. 2021; 9(6):658. https://doi.org/10.3390/jmse9060658
Chicago/Turabian StyleLi, Jian, Peng Wang, Xiaoyi An, Da Lyu, Ruixuan He, and Baoshou Zhang. 2021. "Investigation on Hydrodynamic Performance of Flapping Foil Interacting with Oncoming Von Kármán Wake of a D-Section Cylinder" Journal of Marine Science and Engineering 9, no. 6: 658. https://doi.org/10.3390/jmse9060658