
Towfish Attitude Control: A Consideration of Towing Point, Center of Gravity, and Towing Speed


Abstract
:1. Introduction
2. Target Towfish
3. Mathematical Model
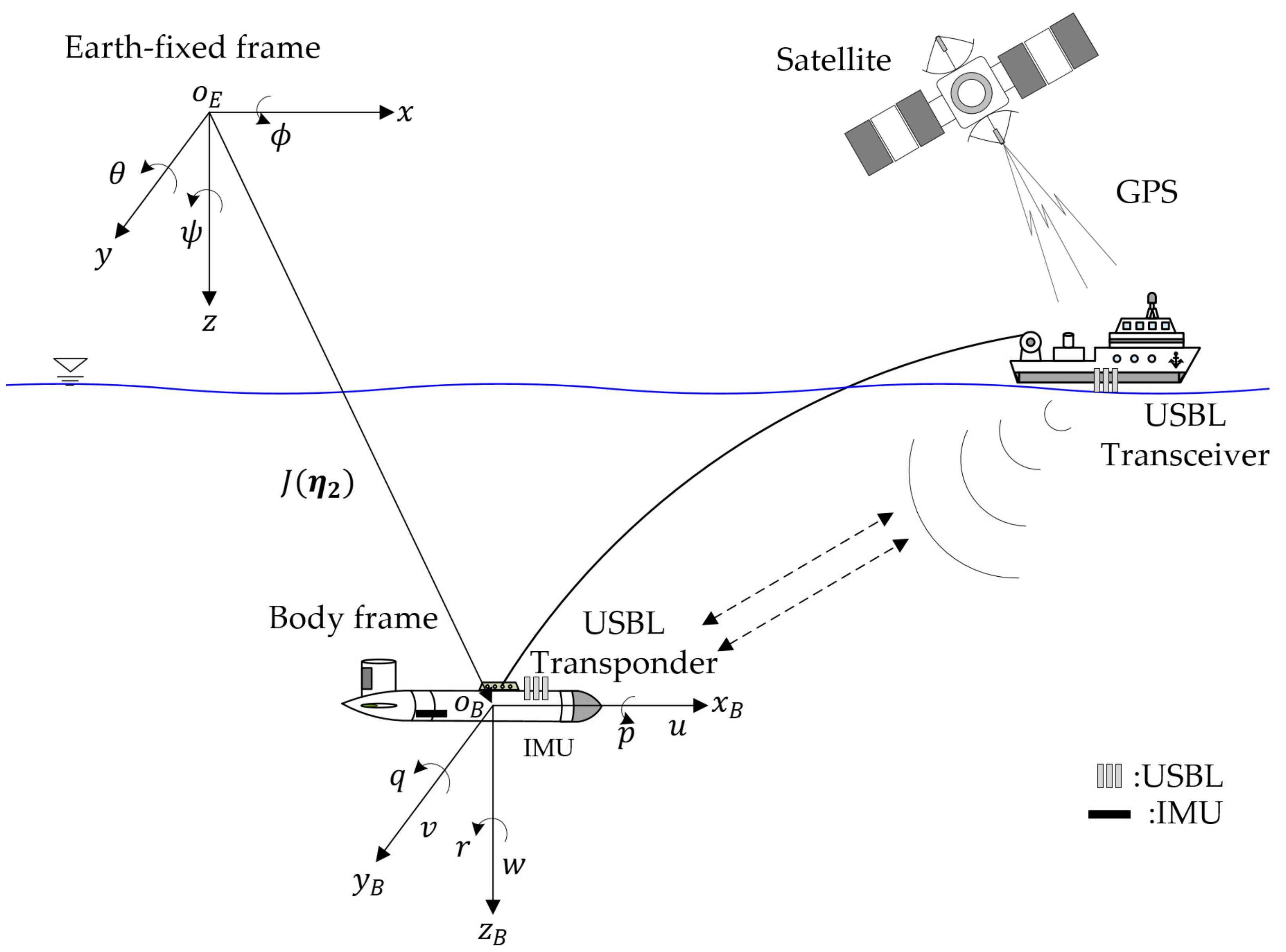
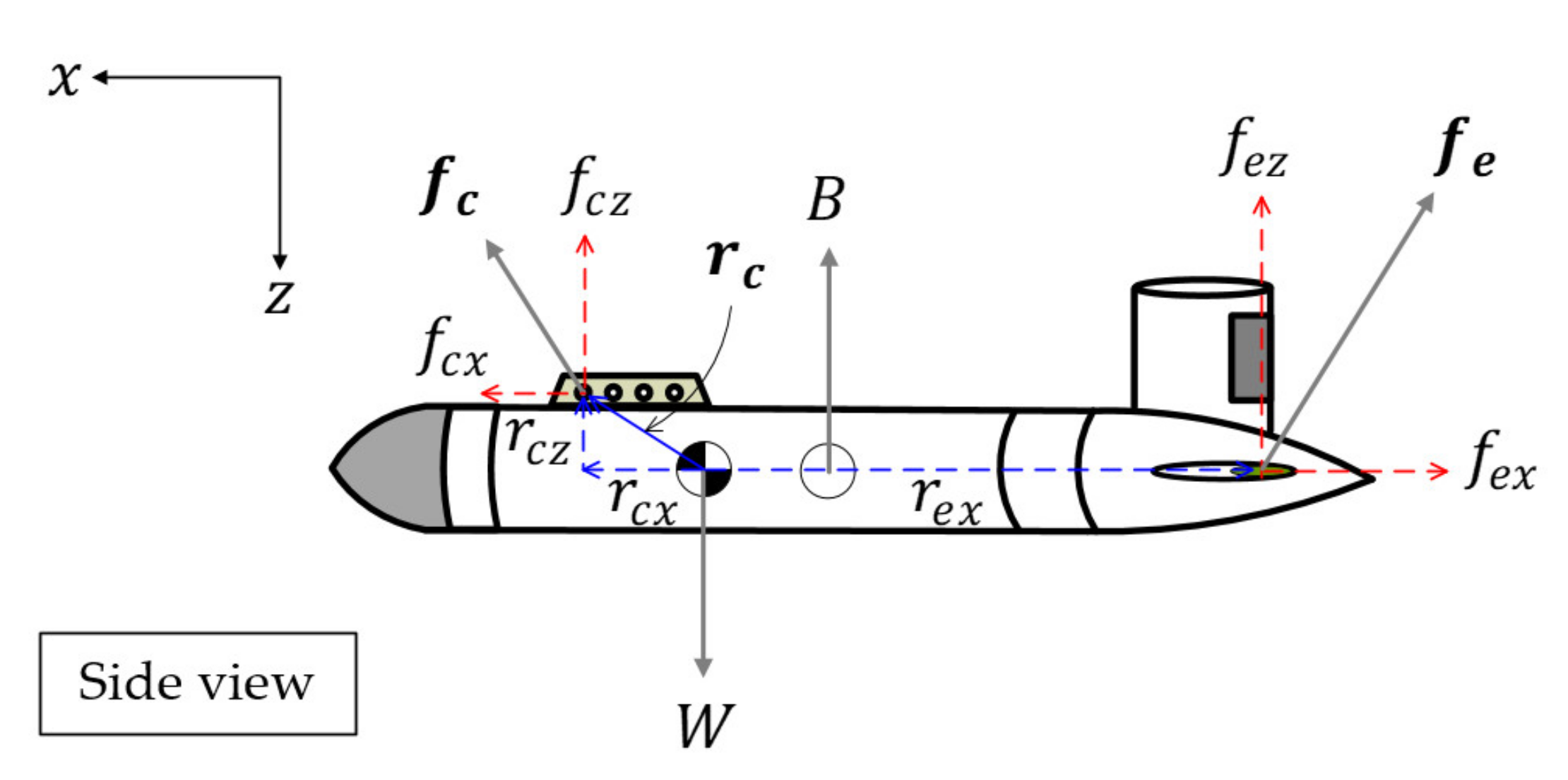
3.1. Dynamic Towfish Model
3.2. Dynamic Model of the Towing Cable
4. Feasible Region of the Towing Point for Attitude Control
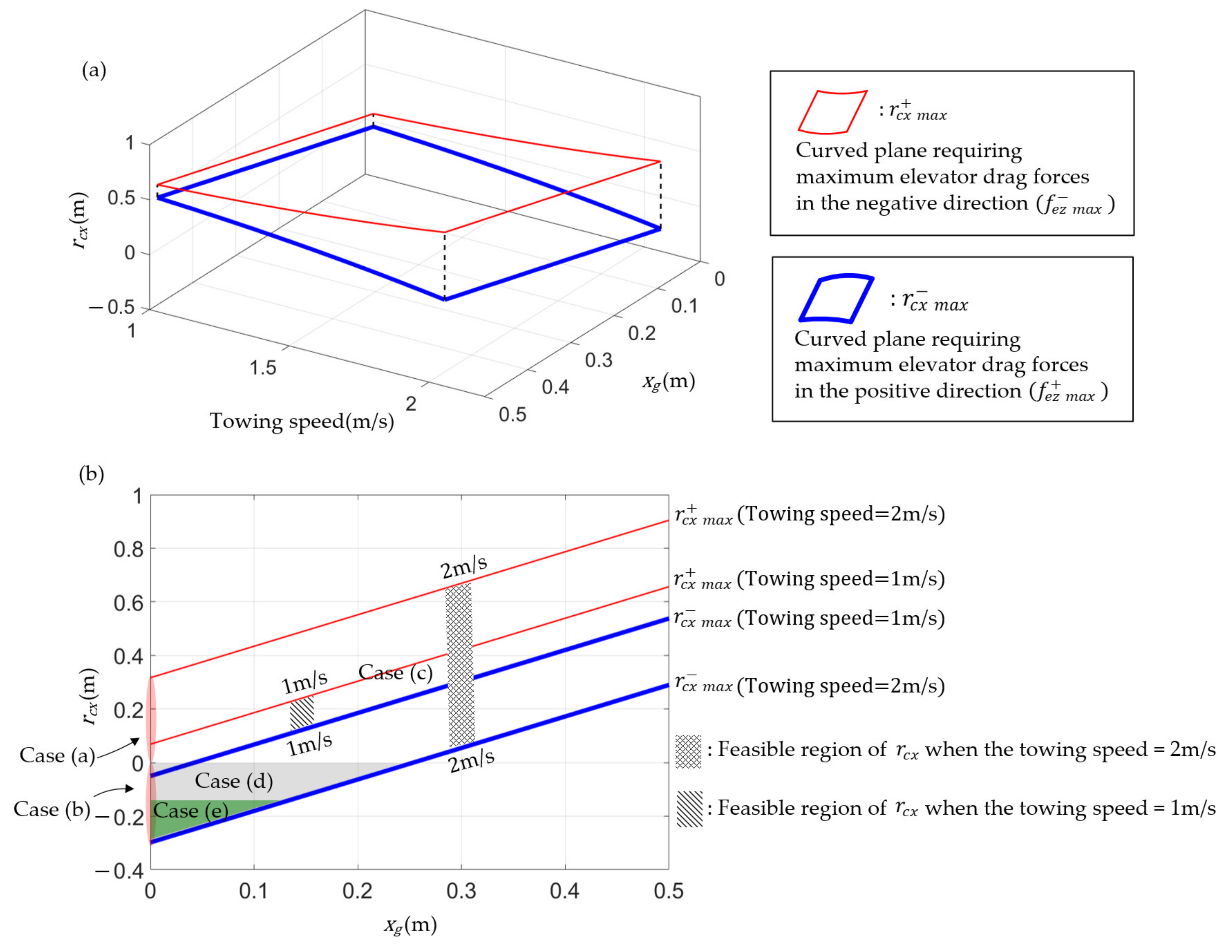
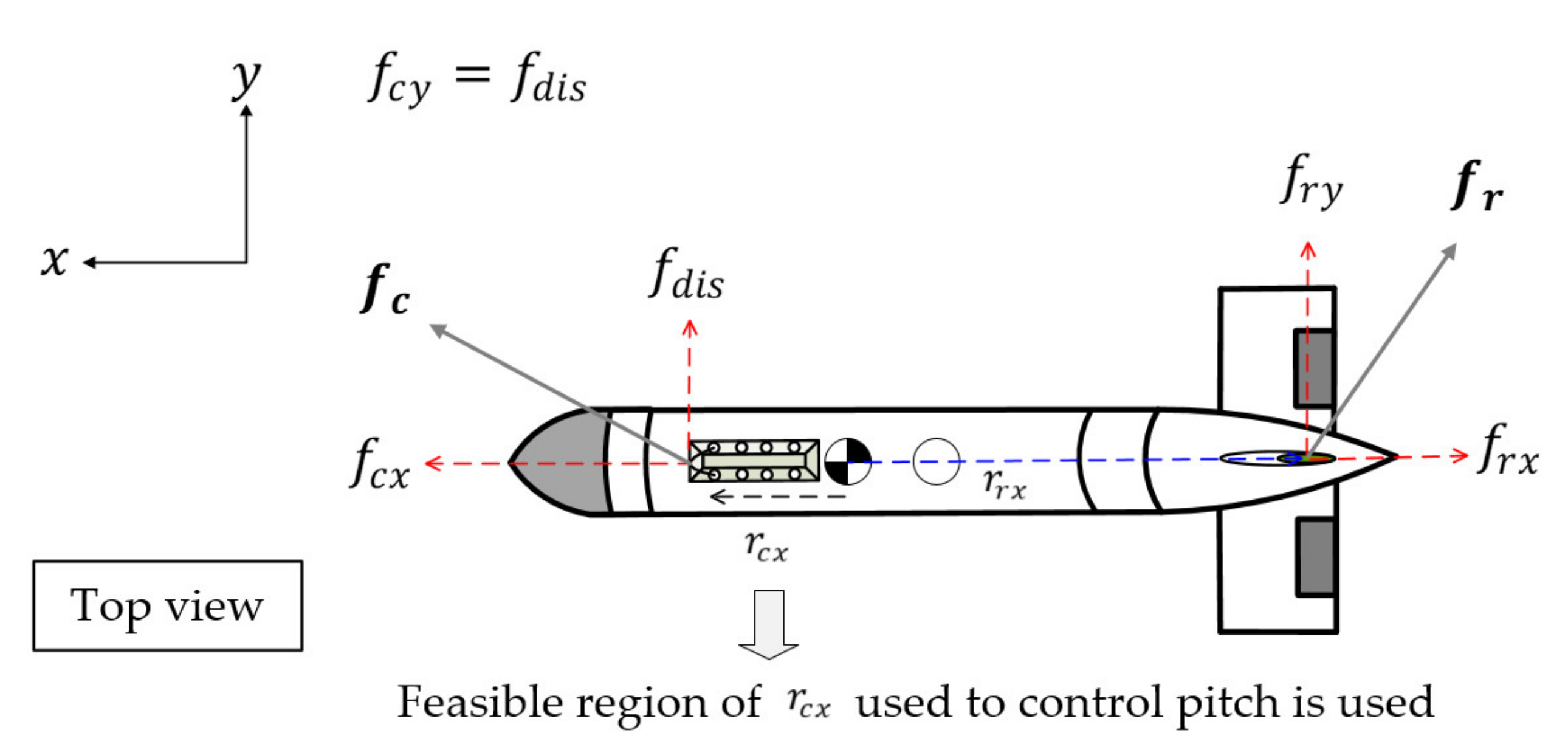
4.1. Feasible Towing Point for Pitch Control
4.1.1. When the Center of Gravity Is the Same as the Center of Buoyancy (Cases (a) and (b))
4.1.2. When the Center of Gravity Is Before the Center of Buoyancy (Cases (c)–(e))
4.2. Yaw Control
5. Simulation
5.1. Simulation Conditions
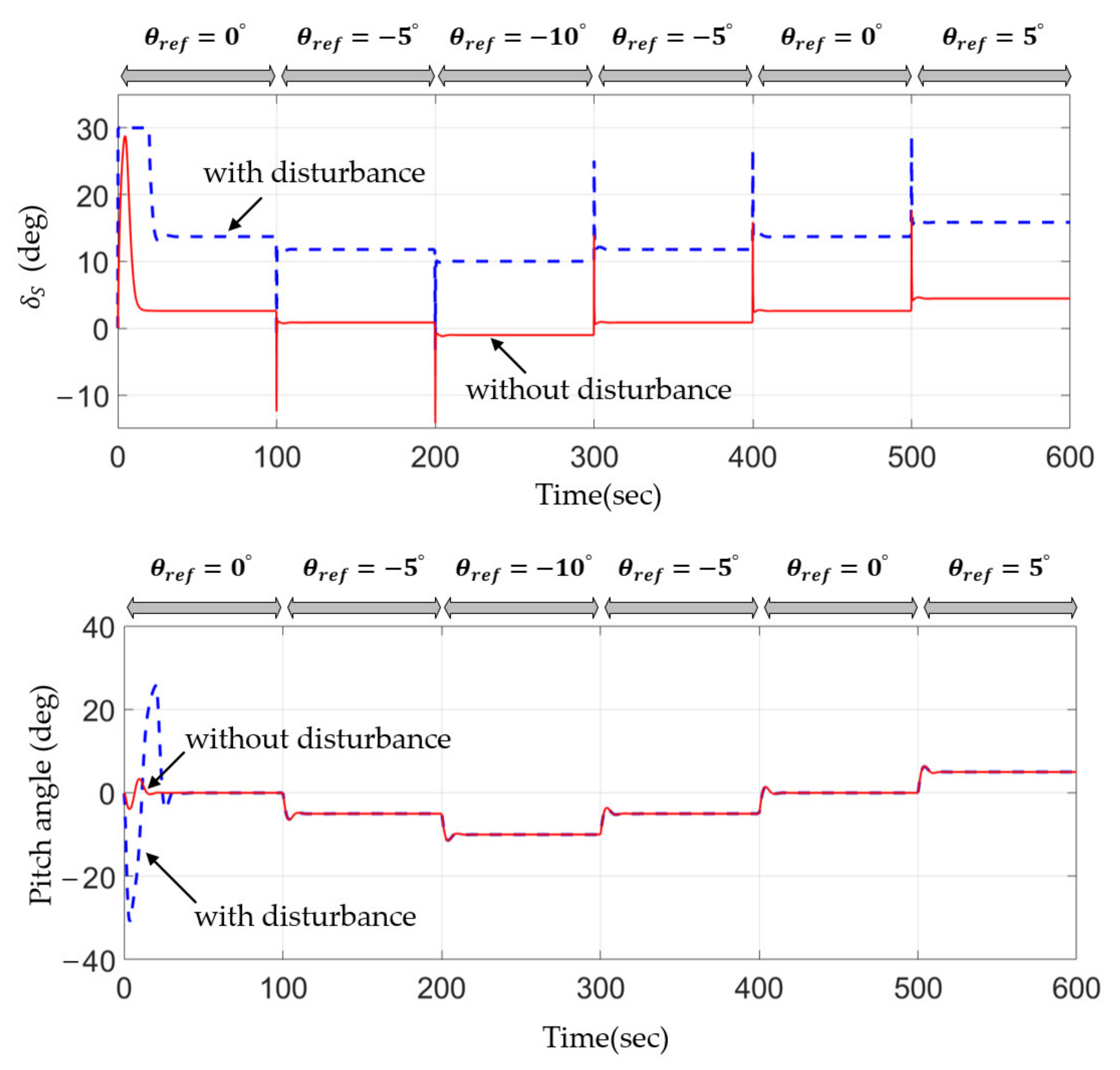
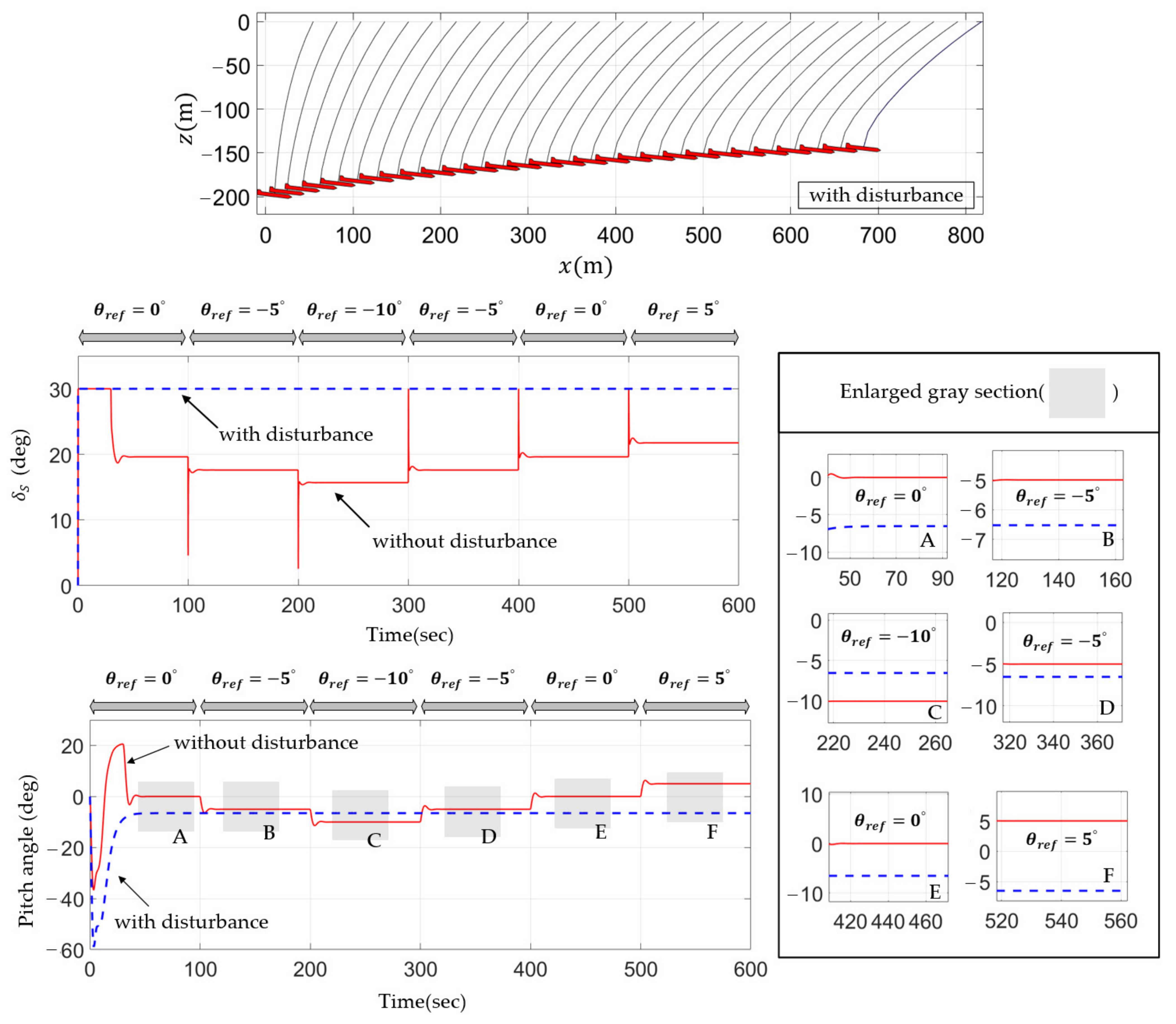
5.2. Pitch Control for Cases (c) and (e)
5.3. Pitch Control for Cases (c) and (e) When Disturbance Is Applied
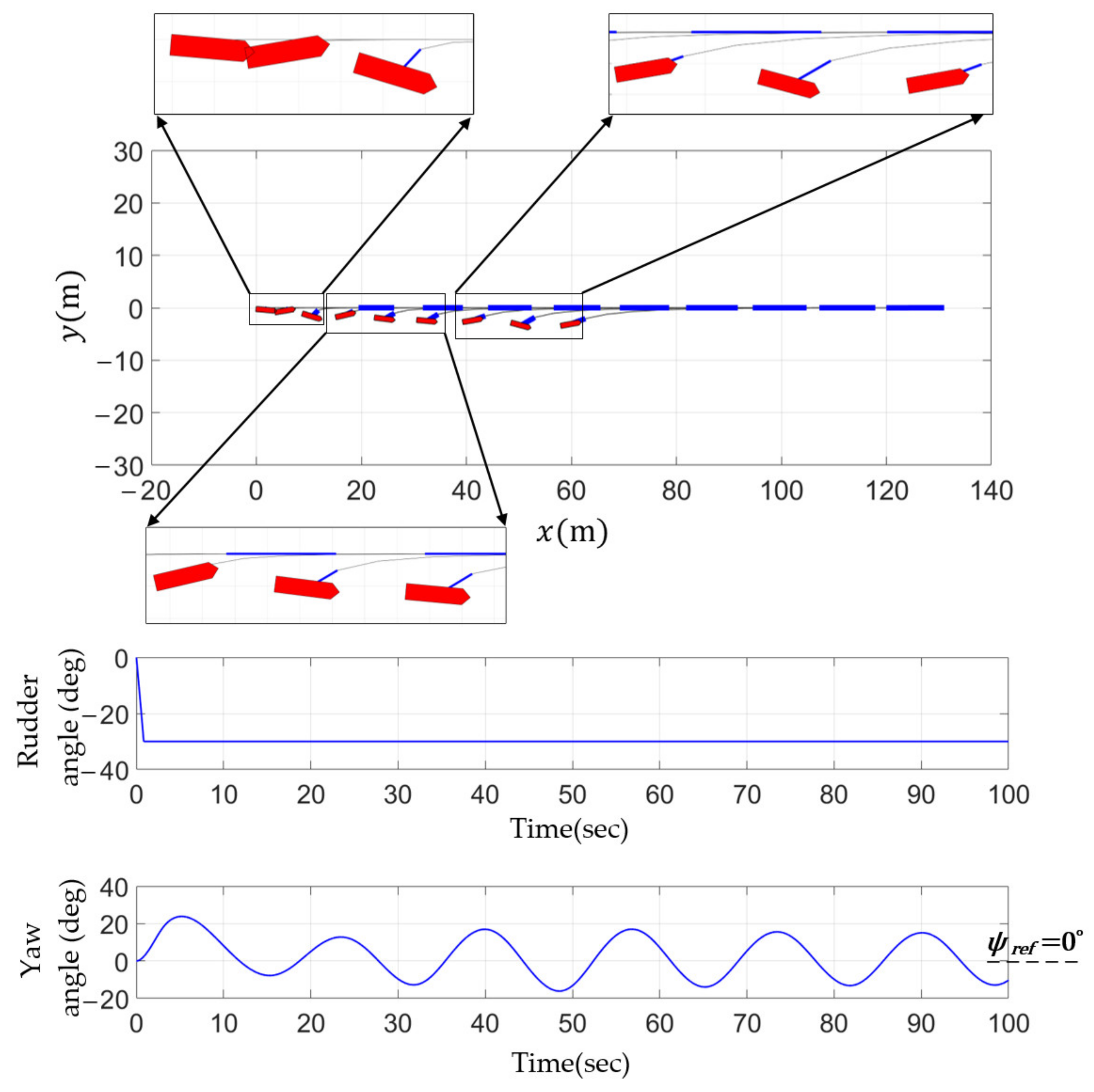
5.4. Yaw Control
5.4.1. At the Point Marked with a Circle
5.4.2. At the Point Marked with a Triangle
6. Conclusions
- (1)
- When the feasible towing point is located before the center of gravity, attitude control can be achieved even if disturbance is applied;
- (2)
- When the feasible towing point is located behind the center of gravity, attitude control is difficult to be accomplished sufficiently because there is small spare range of the elevator angles;
- (3)
- The yaw control is required. Otherwise, the towfish can move in the form of a sine wave if disturbance is applied consistently;
- (4)
- To track a given path accurately, sway control is required together with the yaw control.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pang, S.; Li, Y.; Yi, H. Joint Formation Control with Obstacle Avoidance of Towfish and Multiple Autonomous Underwater Vehicles Based on Graph Theory and the Null-Space-Based Method. Sensors 2019, 19, 2591. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murashima, T.; Aoki, T.; Tsukioka, S.; Hyakudome, S.; Yoshida, H.; Nakajoh, S.; Ishibashi, S.; Sasamoto, R. Thin cable systems for ROV and AUV in JAMSTEC. Oceans 2003, 5, 2695–2700. [Google Scholar]
- Kostenso, V.; Tolstonogov, A.; Mokeeva, I. The Combined AUV Motion Control with Towed Magnetometer. In Proceedings of the 2019 IEEE Conference on Underwater Technology, Kaohsiung, Taiwan, 16–19 April 2019. [Google Scholar]
- Wakita, N.; Hiyoshi, H.; Lchikawa, T.; Yamauchi, Y. Development of Autonomous Underwater Vehicle (AUV) for Exploring Deep Sea Marine Mineral Resources. Mitsubishi Heavy Ind. Tech. Rev. 2010, 47, 73–80. [Google Scholar]
- Yan, Z.; Wu, Y.; Zhang, G. A Real-Time Path Planning Algorithm for AUV in Unknown Underwater Environment Based on Combining PSO and Waypoint Guidance. Sensors 2018, 19, 20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, X.; Sun, H.; Jan, G. Multi-AUV cooperative target search and tracking in unknown underwater environment. Ocean Eng. 2018, 150, 1–11. [Google Scholar] [CrossRef]
- Park, J.; Kim, N. Dynamics modeling of a semi-submersible autonomous underwater vehicle with a towfish towed by cable. Nav. Archit. Ocean Eng. 2015, 7, 409–425. [Google Scholar] [CrossRef] [Green Version]
- Go, G.; Ahn, H. Hydrodynamic derivative determination based on CFD and motion simulation for a tow-fish. Appl. Ocean Res. 2019, 82, 191–209. [Google Scholar] [CrossRef]
- Buckham, B.; Nahon, M.; Seto, M.; Zhao, X.; Lambert, C. Dynamics and control of a towed underwater vehicle system, part 1: Model development. Ocean Eng. 2003, 30, 453–470. [Google Scholar] [CrossRef]
- Lee, J.; Oh, Y.; Park, S.; Kim, H. Development of towed synthetic aperture sonar system. Korea Soc. Nav. Sci. Technol. 2019, 2, 28–31. [Google Scholar] [CrossRef]
- Conrad, R.A. Development and Characterization of a Side Scan Sonar Towfish Stabilization Device. Master’s Thesis, University of New Hampshire, Durham, UK, 2006. [Google Scholar]
- Pilbrow, E.; Hayes, P.; Gough, P. Inertial Navigation System for a Synthetic Aperture Sonar Towfish. In Proceedings of the Electronics New Zealand Conference, Christchurch, New Zealand, 26–28 November 2002. [Google Scholar]
- Crawford, A. Methods of Determining Towfish Location for Improvement of Side Scan Sonar Image Positioning; Defense Research Reports. Report Number: DRDC-ATLANTIC-TM-2003-019-Technical Memorandum; Defence Research Establishment Atlantic: Dartmouth, NS, Canada, 2002. [Google Scholar]
- Muscat, M.; Cammarata, A.; Maddio, P.; Sinatra, R. Design and development of a towfish to monitor marine pollution. Euro-Mediterr. J. Environ. Integr. 2018, 3, 1–12. [Google Scholar] [CrossRef]
- Antonelli, G.; Chiaverini, S.; Finotello, R.; Schiavon, R. Real-time path planning and obstacle avoidance for RAIS: An autonomous underwater vehicle. Ocean Eng. 2001, 26, 216–227. [Google Scholar] [CrossRef]
- Korte, H. Track Control of a Towed Underwater Sensor Carrier. IFAC Proc. Vol. 2000, 33, 89–94. [Google Scholar] [CrossRef]
- Pilbrow, E.; Hayes, M. Acoustic Timing Simulation of Active Beacons for Measuring the Tow-Path of a Synthetic Aperture Sonar; Acoustic Research Groups: Christchurch, New Zealand, 2004. [Google Scholar]
- Fortune, S.; Gough, P.; Hayes, M. A Statistical Method for Autofocus of Synthetic Aperture Sonar Images. In Proceedings of the IVCN 2000, Hamilton, New Zealand, 6 January 2000. [Google Scholar]
- Cammarata, A.; Sinatra, R. Parameter Study for the Steady-State Equilibrium of a Towfish. Intell. Robot. Syst. 2016, 81, 231–240. [Google Scholar] [CrossRef]
- Teixeira, F.; Aguiar, A.; Pascoal, A. Nonlinear adaptive control of an underwater towed vehicle. Ocean Eng. 2010, 37, 1193–1220. [Google Scholar] [CrossRef]
- Muscat, M.; Formosa, M.; Salgado, G.; Sinatra, R.; Cammarata, A. Design of an Underwater Towfish Using Design by Rule and Design by Analysis. In Proceedings of the ASME 2014 Pressure Vessels and Piping Conference, Anakeim, CA, USA, 20–24 July 2014. [Google Scholar]
- Koterayama, W.; Kyozukw, Y.; Nakamura, M.; Ohkusu, M.; Kashiwagi, M. The motion of a depth controllable towed vehicle. Offshore Mech. Artic Eng. 1988, 1, 423–430. [Google Scholar]
- Bagheri, A.; Karimi, T.; Amanifard, N. Tracking performance control of a cable communicated underwater vehicle using adaptive neural network controllers. Appl. Soft Comput. 2010, 10, 908–918. [Google Scholar] [CrossRef]
- Seto, M.; Watt, G. The interaction dynamics of a semi-submersible towing a large towfish. In Proceedings of the 8th International Offshore and Polar Engineering Conference, Montreal, QC, Canada, 24–29 May 1998. [Google Scholar]
- Wu, J.; Chen, J.; Xu, Y.; Jin, X.; Lu, L.; Chen, Y. Experimental Observation on a Controllable Underwater Towed Vehicle With Vertical Airfoil Main Body. In Proceedings of the 34th International Conference on Ocean, Offshore and Artic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Choi, J.-K.; Sakai, H.; Tanaka, T. Autonomous Towed Vehicle for Underwater Inspection in a Port Area. In Proceedings of the International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Khan, M.; Khan, A.; Zoppi, M.; Molfino, R. Development of a 5 degree-of-freedom Towfish and its Control Strategy. In Proceedings of the 6th International Conference on Field and Service Robotics, Chamonix, France, 9–12 July 2007. [Google Scholar]
- Lambert, C.; Nahon, M.; Buckham, B.; Seto, M. Dynamics and control of towed underwater vehicle system, part 2: Model validation and turn maneuver optimization. Ocean Eng. 2003, 30, 471–485. [Google Scholar] [CrossRef]
- Winget, J.; Huston, R. Cable dynamics—A finite segment approach. Comput. Struct. 1976, 4, 245–249. [Google Scholar] [CrossRef]
- Koterayama, W.; Yamaguchi, S.; Nakamura, M.; Mariyama, A.; Akamatsu, T. A Numerical Study for Design of Depth, Pitch And Roll Control System of a Towed Vehicle. In Proceedings of the 4th International Offshore and Polar Engineering Conference, Osaka, Japan, 10–15 April 1994. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons Ltd: Sussex, UK, 2011. [Google Scholar]
- Fossen, T.I. Marine Control. Systems; Marine Cybernetics: Trondheim, Norway, 2001. [Google Scholar]
- Fossen, T.I. Guidance and Control. of Ocean Vehicles; John Wiley & Sons Ltd: Sussex, UK, 1994. [Google Scholar]
- Yokobiki, T.; Koterayama, W.; Yamaguchi, S.; Nakamura, M. Dynamics and Control of a Towed Vehicle in Transient Mode. Int. J. Offshore Polar Eng. 2000, 10, 19–25. [Google Scholar]
- Osamu, N.; Nakamura, M.; Koterayama, W. Dynamic Simulation And Field Experiment of Submarine Cable During Laying And Recovery. In Proceedings of the 12th International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002. [Google Scholar]
- Park, C.; Shin, M.; Choi, J.; Hwang, H.; Shin, Y.; Kim, Y. An Experimental Study on Effect of Angle of Attack on Elevator Control Force for Underwater Vehicle with Separate Fixed Fins. Ocean Eng. Technol. 2016, 30, 243–252. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Towfish | |||
|---|---|---|---|
| Length | 3.5 m | Diameter | 0.4 m |
| Single elevator area | 0.025 m2 | Rudder area | 0.03 m2 |
| Weight in air | 2940 N | Buoyancy | 490 N |
| Operating depth | ≤200 m | Towing speed | ≤2 m/s |
| Positioning and attitude sensors (manufacturer/model) | |||
| USBL (Advanced Navigation/Subsonus) | 0.1 m Position Accuracy 1000 m Range and Depth | ||
| IMU (Advanced Navigation/Spatial FOG Dual) | 0.01° Roll, Pitch, and Heading 0.05°/HR FOG Gyroscope | ||
| Parameter | Values | Parameter | Values |
|---|---|---|---|
| Parameter | Values | Parameter | Values |
|---|---|---|---|
| Case (c) | Case (e) | |
|---|---|---|
| selected for simulation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.-K.; Park, D.-J.; Oh, Y.-S.; Kim, J.-H.; Choi, J.-K. Towfish Attitude Control: A Consideration of Towing Point, Center of Gravity, and Towing Speed. J. Mar. Sci. Eng. 2021, 9, 641. https://doi.org/10.3390/jmse9060641
Kim M-K, Park D-J, Oh Y-S, Kim J-H, Choi J-K. Towfish Attitude Control: A Consideration of Towing Point, Center of Gravity, and Towing Speed. Journal of Marine Science and Engineering. 2021; 9(6):641. https://doi.org/10.3390/jmse9060641
Chicago/Turabian StyleKim, Min-Kyu, Dong-Jin Park, Yeong-Seok Oh, Jong-Hwa Kim, and Jin-Kyu Choi. 2021. "Towfish Attitude Control: A Consideration of Towing Point, Center of Gravity, and Towing Speed" Journal of Marine Science and Engineering 9, no. 6: 641. https://doi.org/10.3390/jmse9060641