1. Introduction
Floating devices are attracting increasing attention to meet the global demand for green and renewable energy sources. An important factor for the safety of devices such as floating offshore wind turbines (FOWTs) is the correct construction of the attached mooring systems. In comparison to traditional offshore systems, where mainly large but low-frequency motions occur [
1], FOWTs require stronger fixing of the platforms in order to ensure safe operations with rotating turbines. This stronger coupling between the motion of the floating body and the mooring system leads to the occurrence of slack lines and subsequently snap loads.
The most efficient approach for modelling the influence of mooring systems on floating structures is based on the analytical catenary solution [
1] for slack lines and the elastic spring solution for taught lines. Both approaches are generally restricted to their primary intended forms, and their validity is based on the assumption of small motions of the moored system. A more elaborate version of this class of simplified approaches is a quasi-static solution [
2,
3] which combines the flexibility of a numerical model with the efficiency of an analytical formulation. However, the quasi-static assumption is still a serious restriction that does not hold for floating offshore wind turbines. Here, the dynamics of the mooring lines, which are described by non-linear partial differential equations of second order in both space and time, have to be included in the analysis.
If bending stiffness is neglected, multiple numerical solutions are applicable. Amongst others, finite differences [
4,
5,
6], finite elements [
7,
8,
9] and lumped mass [
10,
11,
12] methods have been proposed. Recently, Palm et al. [
13] utilised a discontinuous Galerkin method for solving the system. Thus, snap loads could be modelled with a high order of accuracy. These loads necessarily follow a phase of local slack which is characterised by vanishing axial stresses, and thus an ill-posed system if no bending stiffness is considered [
14]. As pointed out by Zhu and Meguid [
15], the main mechanism of energy propagation in these low tension situations also changes from axial to bending dominant. Thus, the ability to capture the correct bending dynamics of slack cables in three dimensions is a required extension for accurate mooring modelling [
8].
One of the first attempts to include bending stiffness into a mooring model was presented by Garrett [
9]. He developed a three-dimensional finite element model assuming a linearly elastic and torque-free rod. The effects of rotary inertia and shear deformations were neglected. Similar assumptions were made by Burgess [
16] for proposing a cable model based on finite difference methods. Here, Euler angles were applied to account for the rotation of the line. This implies numerical difficulties, known as the Gimbal lock effect, in practice. Palm and Eskilsson [
14] extended their Galerkin method for bending stiffness by following the idea of Garrett [
9] and Tjavaras [
17]. Thus, the inertia effects of the rotation of the cross-section were neglected and no torsion or shear force was considered. In [
8], a cubic cable element with the translational positions of the end nodes as unknown variables was proposed. This element choice and the assumption of no external moments allowed the reformulation of the conservation laws in terms of forces acting on the node points. The resulting formulation is more compact than traditional finite element formulations which are based on 12 state variables.
More elaborate approaches were developed based on beam models suitable for deformable one-dimensional elastic structures. Mooring lines, such as other marine cables, are considered as beams undergoing large displacements and rotations [
18]. Euler–Bernoulli beam models can account for the axial stiffness, bending and torsion under the assumption of small displacements, and the fact that the cross-sections remain undeformed during bending. The linear Timoshenko–Reissner beam theory includes the shearing effects of Euler–Bernoulli models but holds validity only for geometrically linear cases [
19]. The extension of the latter approach to the geometrically non-linear domain was introduced by Antman [
20] and Reissner [
21], which is also known as the Cosserat rod theory due to Cosserat and Cosserat [
22]. These geometrically exact beam theories provide consistent strain measures, which arise from the equilibrium equations for the deformed configuration, irrespective of the magnitudes of the displacements and rotations. Simo [
23] and Simo and Vu-Quoc [
24,
25] generalised the theory of Antman [
20] to propose a geometrically exact beam model using a rotational vector for the parametrisation of the rotations and the displacement and rotational vectors as the primary unknowns of the system. Quan et al. [
26] recently presented the application of this beam model to underwater cable dynamics, whereas Cottanceau et al. [
18] introduced a quasi-static version for the simulation of flexible cables in air.
As pointed out by Zupan et al. [
27], any choice of the rotational vector in the three-dimensional space can ultimately lead to a singularity at some state of rotation. They overcame this numerical limitation using quaternions which represented a set of four singularity-free parameters. The proposed model solved the dynamics of geometrically non-linear beams in quaternion descriptions based on the Newmark integration scheme and the collocation method. Later, Weeger et al. [
28] utilised NURBS curves and quaternions in combination with an isogeometric collocation method to solve the same set of equations. As an alternative, Lang and Arnold [
29] discretised the quaternion-based set of equations using the finite difference method. Thus, a matrix-free formulation of the discrete system could be derived which can be easily solved with common ODE solvers. In [
30], this model was successfully applied to the simulation of a large number of flexible rods in current flow using LES.
In this paper, the efficient Cosserat rod model of Lang and Arnold [
29] is utilised to develop a mooring model with geometrically exact kinematics for the first time. Thus, the effects of shear force, torsion and bending on the behaviour of mooring systems can be analysed in contrast to previous attempts. The advantages of using their formulation and discretisation of the geometrically exact rod theory are the avoidance of the Gimbal lock effect and the efficient matrix-free formulation. However, solving the dynamics of the rotational degrees of freedom is necessarily connected with the disadvantage of increased computational costs compared to simpler mooring models. In particular, the small bending stiffnesses of mooring lines result in a stiff problem which requires small time steps. The model was implemented in the open-source CFD code REEF3D [
31]. The code is based on a numerical wave tank which enables the application to fluid–structure interaction problems of complex free surfaces and moored, floating structures. The remainder of the paper starts by presenting the numerical model for the geometrically exact mooring model in
Section 2. Then, multiple verification (
Section 3) and validation cases (
Section 4) are presented to analyse the accuracy of the approach and discuss its applicability. Next, we present the validated numerical model being applied to the simulation of a moored floating offshore wind platform using CFD in
Section 5. Here, the influences of the bending stiffness on the tension forces in the mooring system and the motion of the structure are studied. The paper concludes with final remarks in
Section 6.
5. Application to the Simulation of a Moored Floating Offshore Wind Turbine Support Structure
The validation case in
Section 4.3 reveals that the proposed mooring model is capable of predicting the correct tension force propagation to a large extent. The main advantage of this model is, however, the capability of incorporating shear, bending and torsion effects into the analysis. The influences of these effects on the expected tension forces and motions of a moored floating offshore wind turbine support structure are analysed in the following.
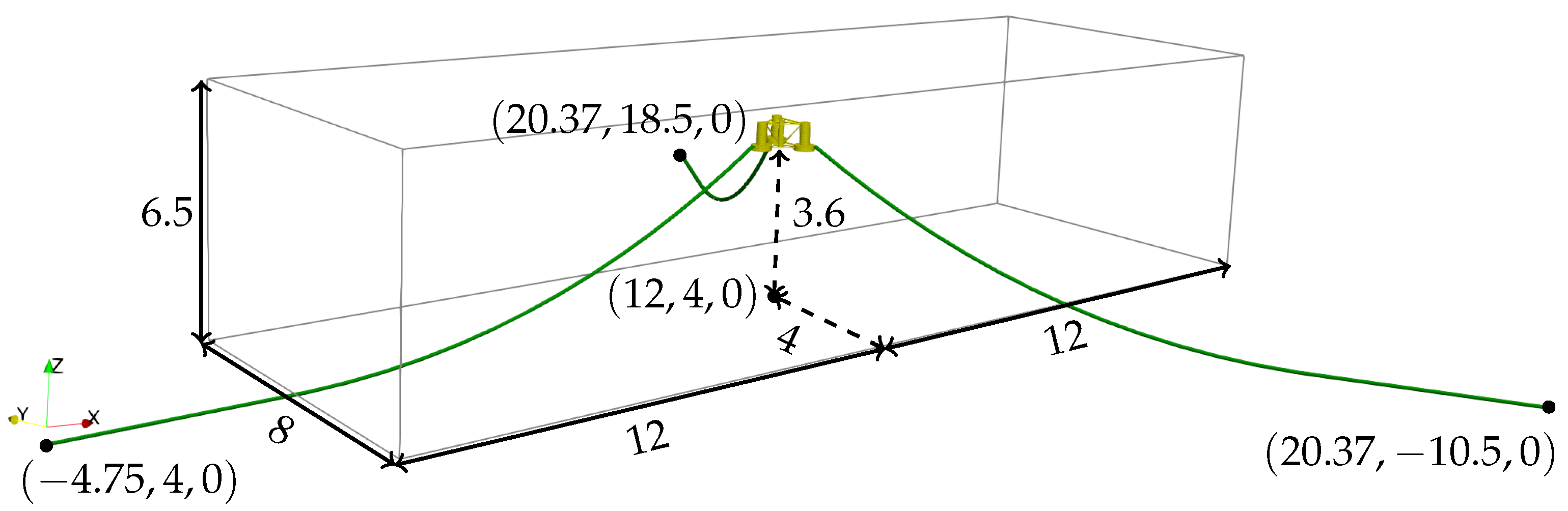
The chosen design was the well-established DeepCwind OC4 semi-submersible FOWT [
52] at a 1:50 Froude scale taken from [
53]. The sub-structure consists of three vertical columns connected to a more slender central column using multiple thin braces. Heave plates are attached to the bottom of the columns to increase stability. The platform is held in place through a mooring system consisting of three catenary lines spread symmetrically about the vertical axis of the structure. The fairleads of the lines are attached to the top of the heave plates, whereas the bottom ends of the lines lie on the sea ground. The stiffness matrices required for the present model were calculated from the given information about the elasticity module and second moments of area calculated from the assumption of a cylindrical shape. The reference solution was taken as the mean of the various numerical models presented in [
54].
The structure was placed in the middle of a numerical wave tank, as shown in
Figure 13. The tank had a length of 24 m, a width of 8 m and a height of
m, and the water depth was 4 m. It can be noticed that the lower part of the mooring system was placed outside the computational domain to lower the computational costs of the simulations. This is also justified by the observation that the fluid velocities close to the bottom of the tank are small and a large portion of the mooring lines lies on the ground. Thus, the fluid velocities outside the computational domain but needed for the external force calculation of the mooring system were assumed to be zero. Near the inlet of the domain, a wave generation zone was defined using the relaxation method [
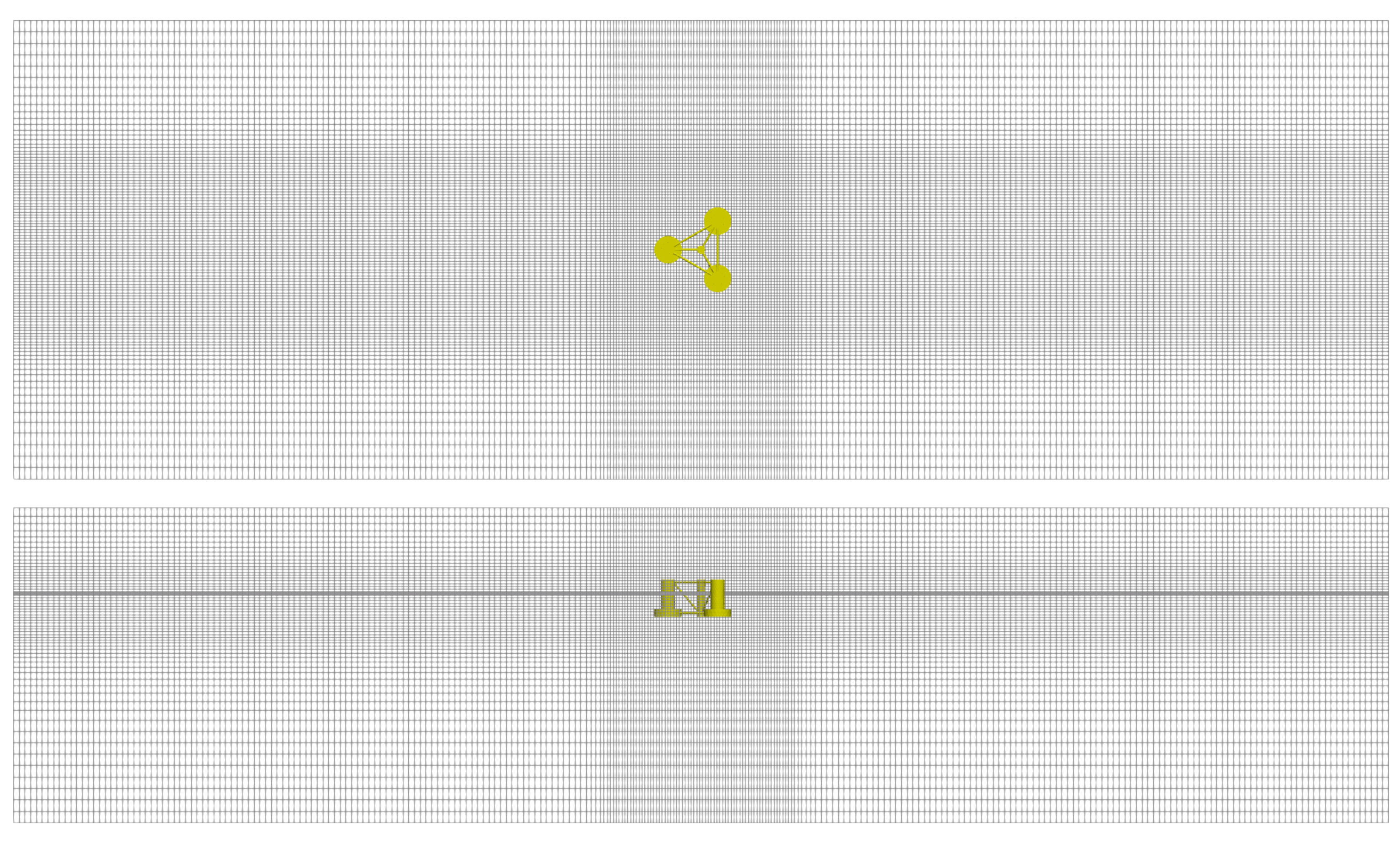
31]. A numerical beach at the end of the domain damped the wave energy to avoid reflections. A rectilinear grid was used to discretise the numerical domain. As can be seen in
Figure 14, a refinement box with uniform grid sizes was defined around the structure. Cells of linearly increasing size were placed between the box and the domain boundaries to ensure a smooth transition. The grid size in the inner domain was determined from decay tests in heave and surge, presented next.
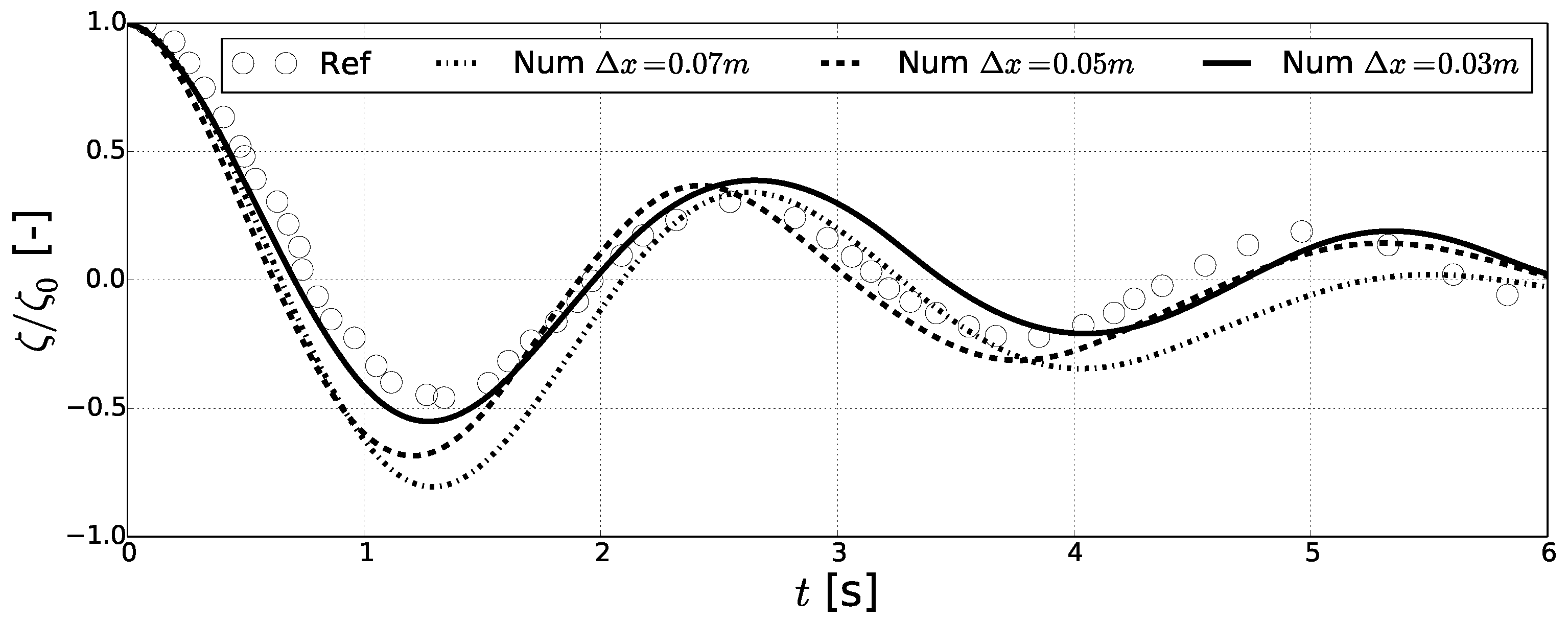
At first, a free heave decay test was conducted for the moored structure using three different grid sizes in the refinement box. The grid size outside of this inner region was automatically calculated based on linear grid growth with a ratio of
.
Figure 15 presents the time series of the heave motion in comparison to the numerical solution in [
54]. At the first peak after
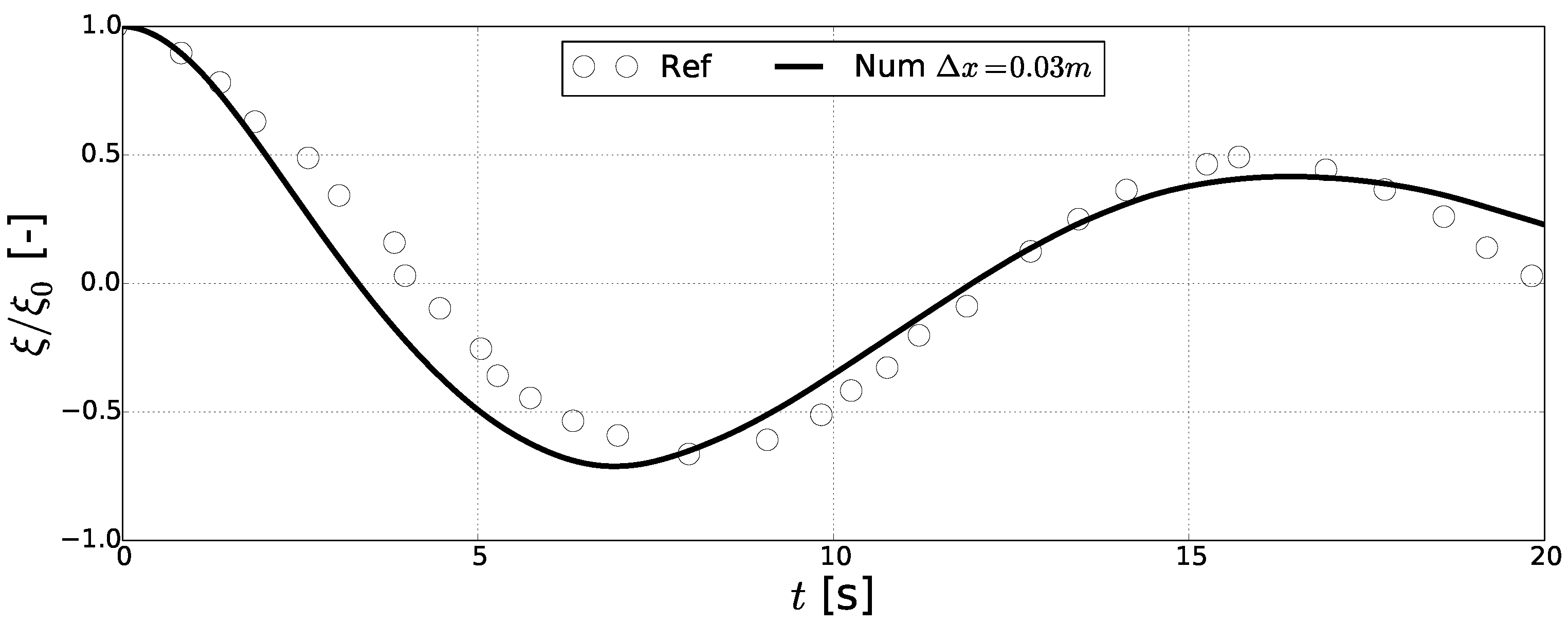
s, the numerical solution converged towards the reference, whereas all grids predicted the correct amplitude at the subsequent peaks. Further, the present model tended to predict a slightly longer natural period than the reference. Next, the grid with a minimum distance of
m was chosen for the surge decay test (
Figure 16). Both the amplitudes and the frequency of the motion were well predicted by the model. Therefore, this grid size was also used for the simulations below. The corresponding mesh had approximately
million grid points.
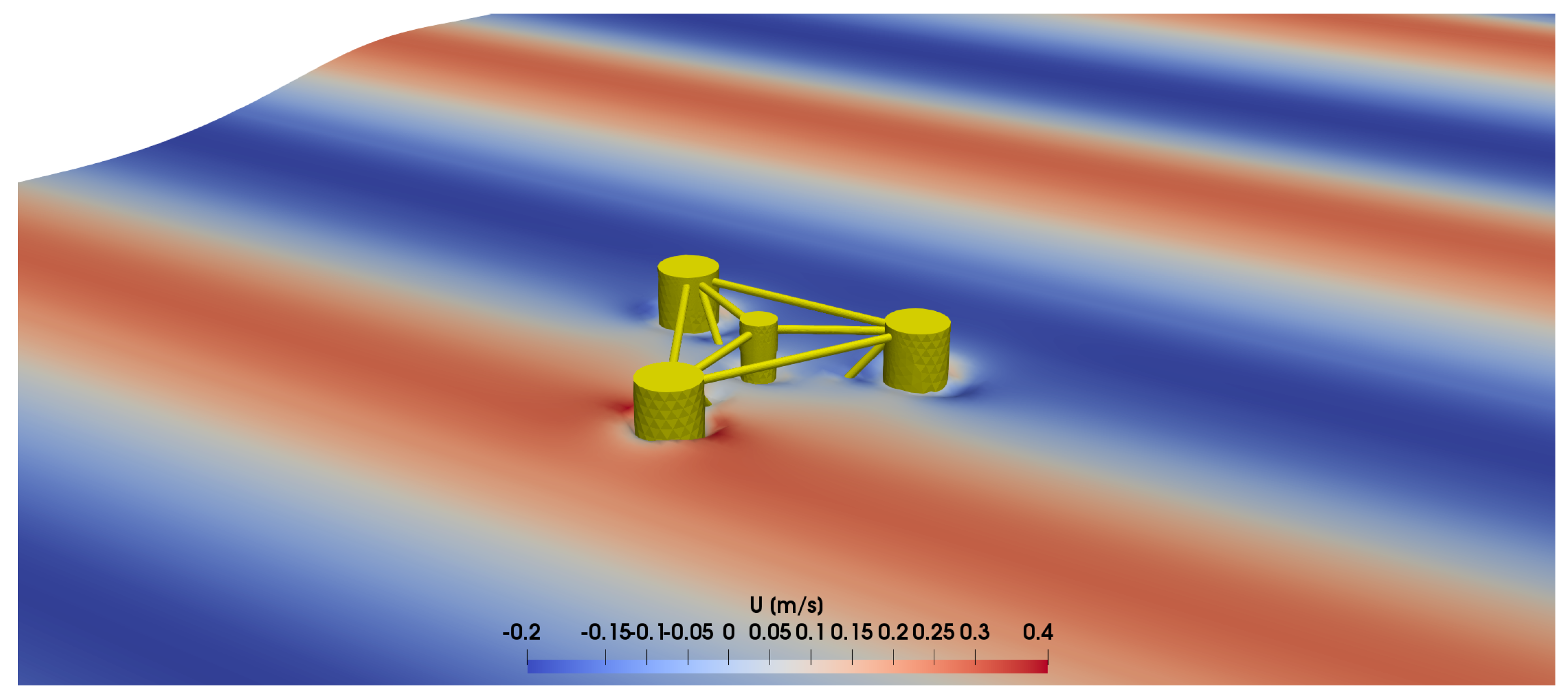
The accuracy of the numerical setup was assessed using a regular wave case with a wave height of
m and a wave period of
s. This corresponds to a wave length approximately twice the structural length, as can be seen in
Figure 17. The wave was modelled as a second-order Stokes wave in the simulation.
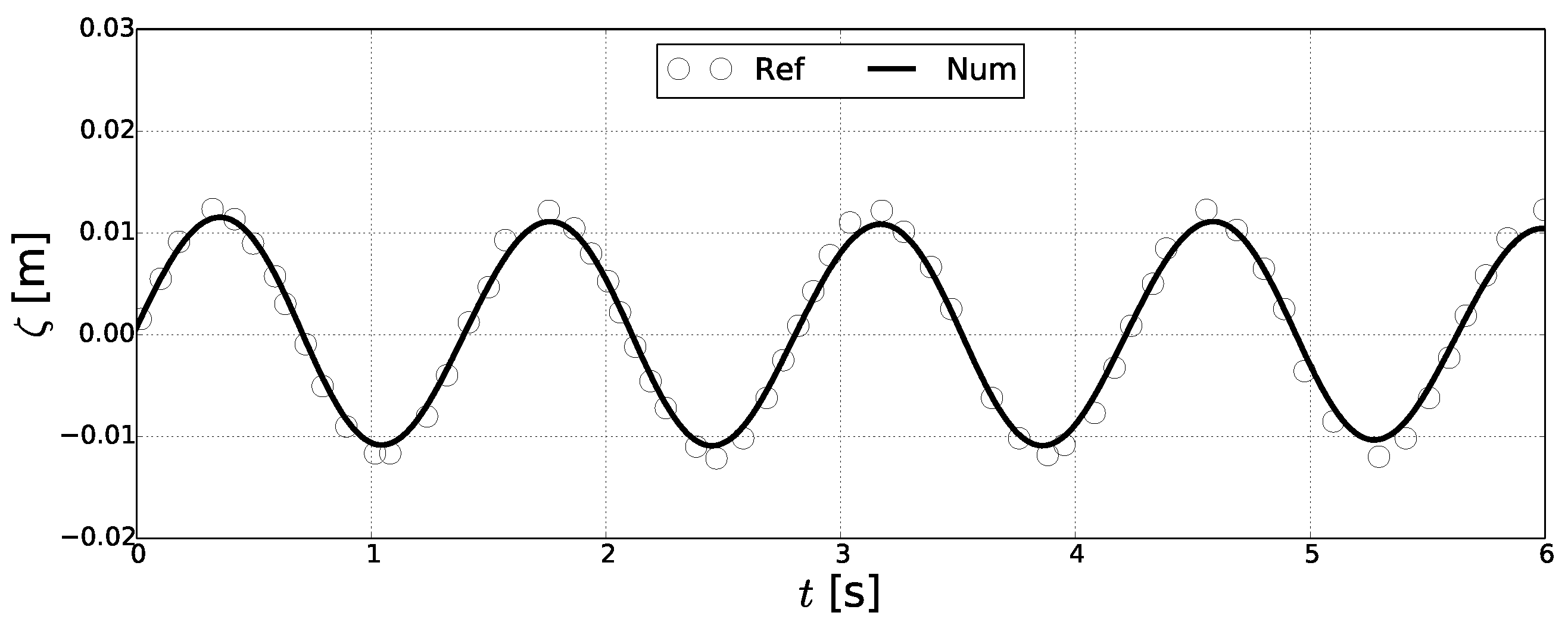
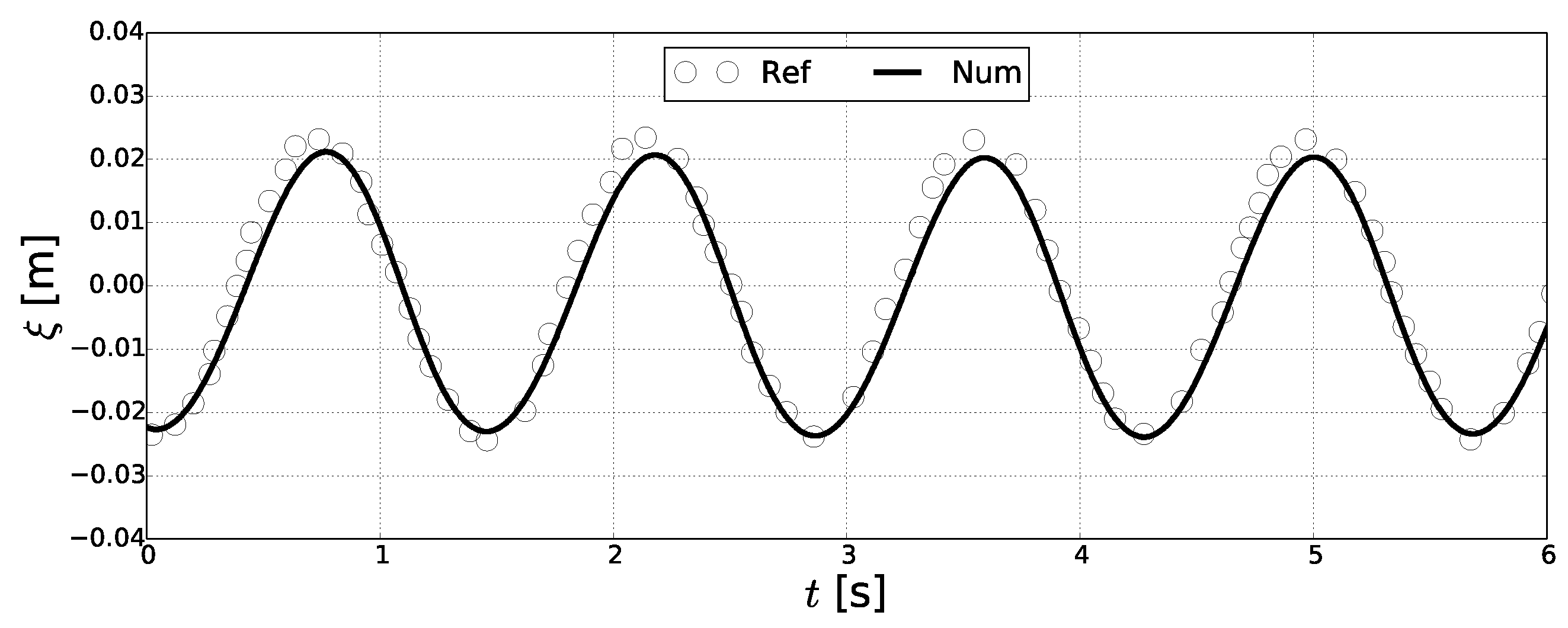
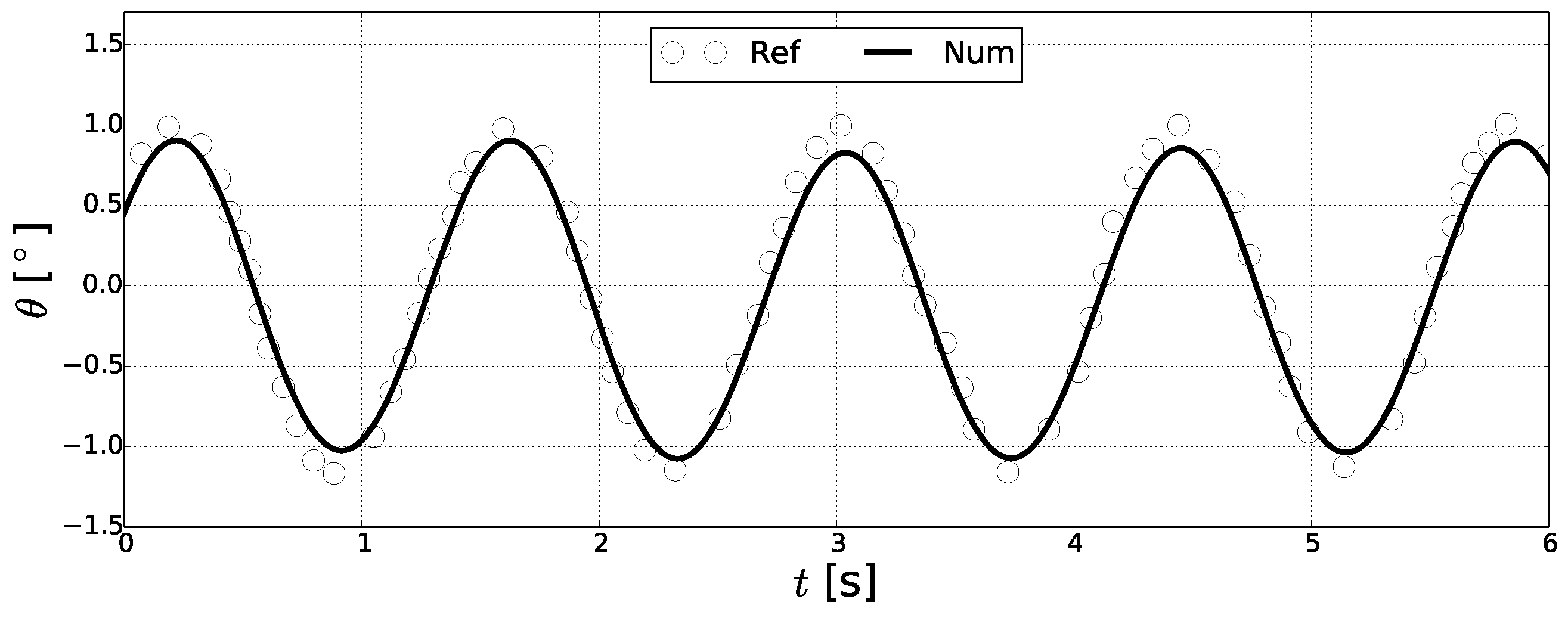
The qualitative comparison of the three body motions to the reference solution can be found in
Figure 18,
Figure 19 and
Figure 20, whereas the quantification of the mean amplitude and frequency is shown in
Figure 21,
Figure 22 and
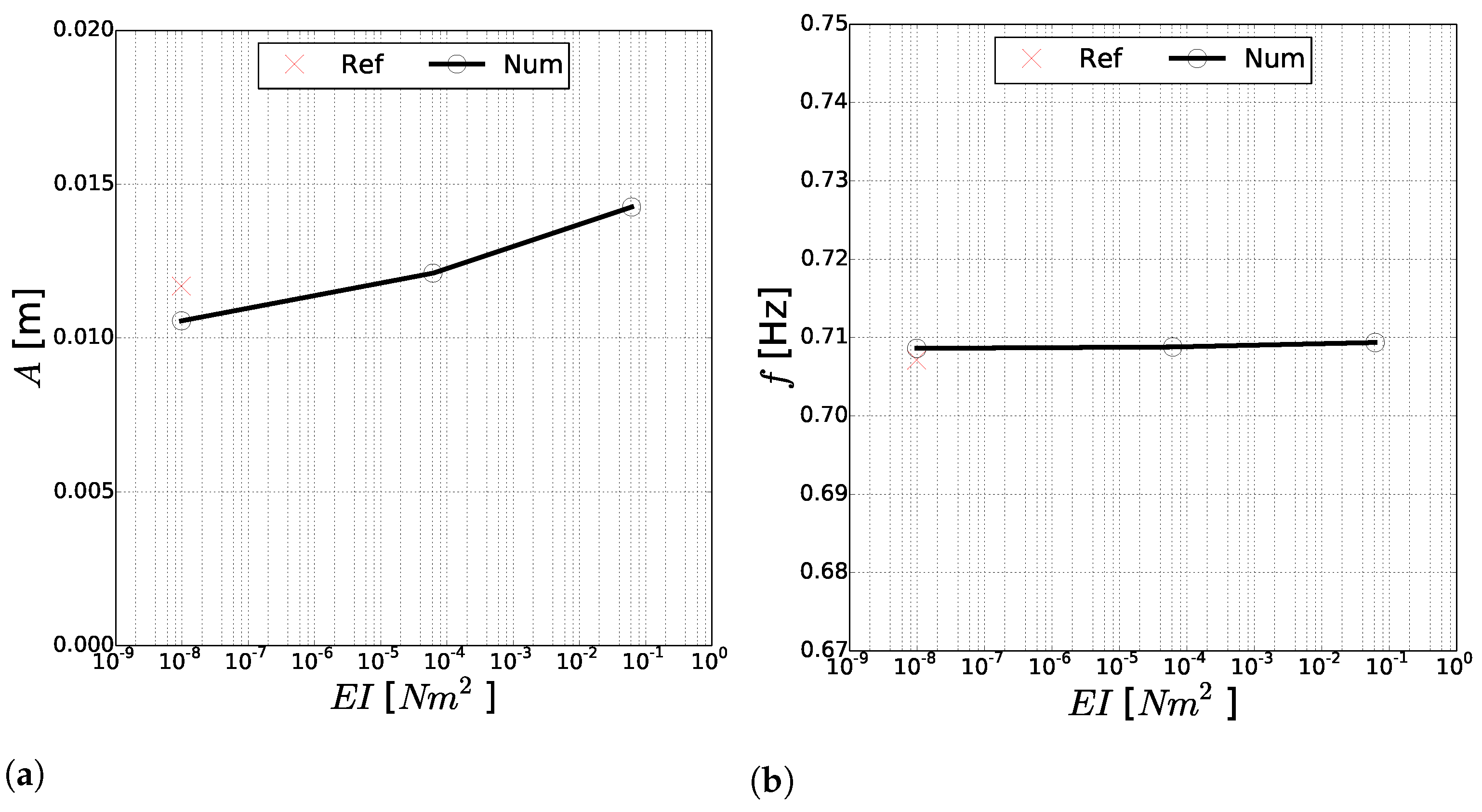
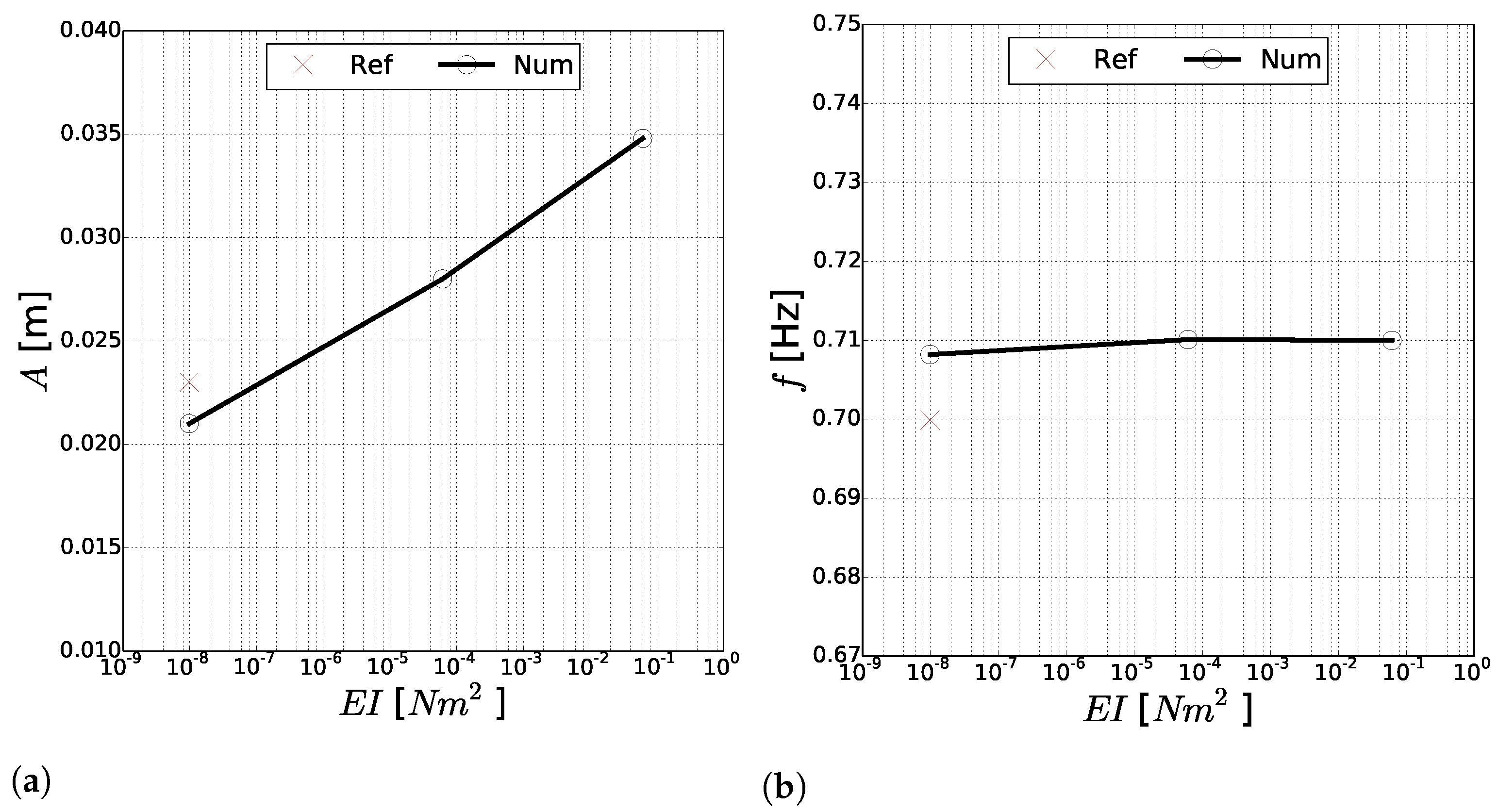
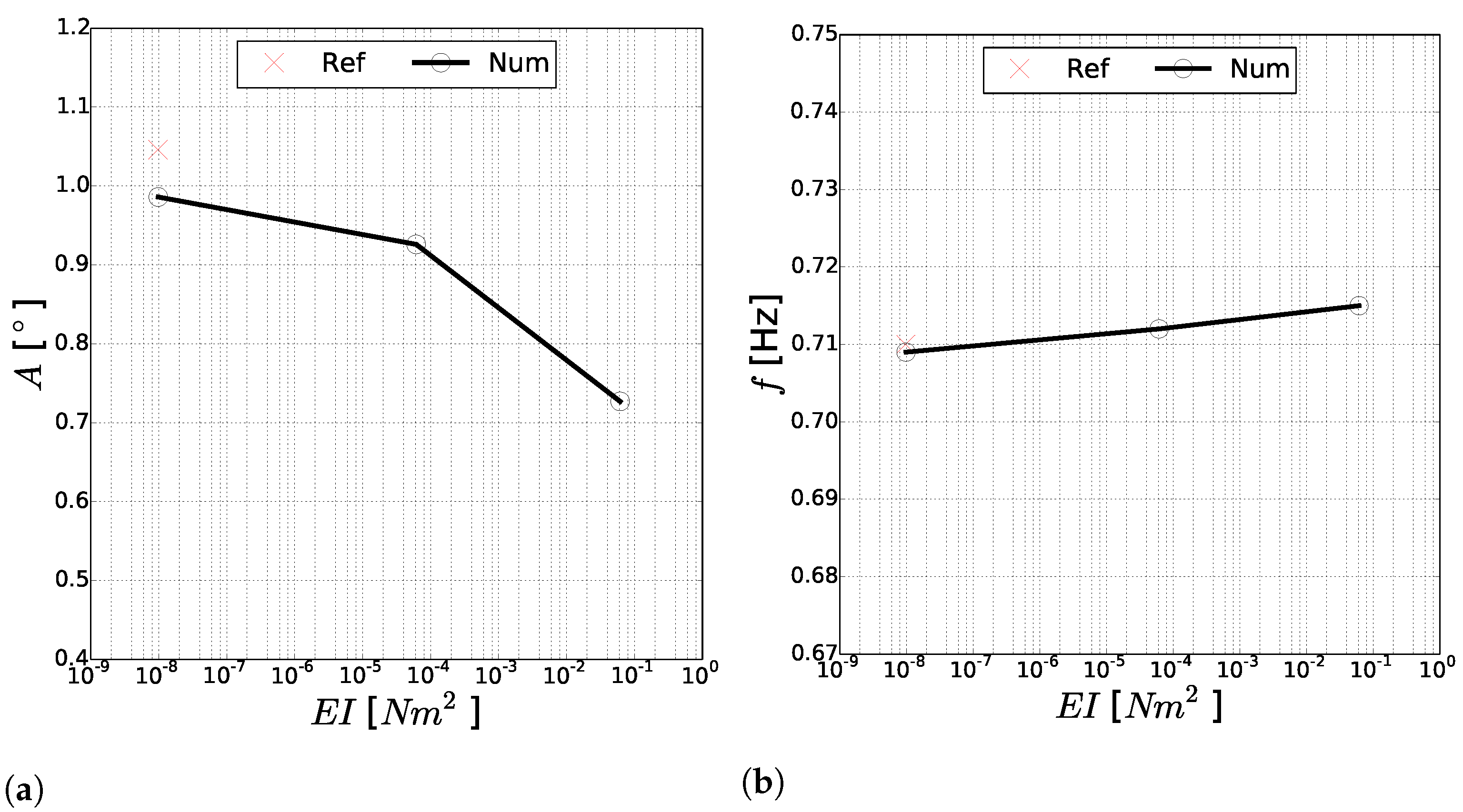
Figure 23. The latter parameters were found from fast Fourier transformations of the steady-state time signals of the motions. Generally, good agreement between the presented and reference simulation can be stated. The frequencies of the three motions are close to the encountered wave frequency of
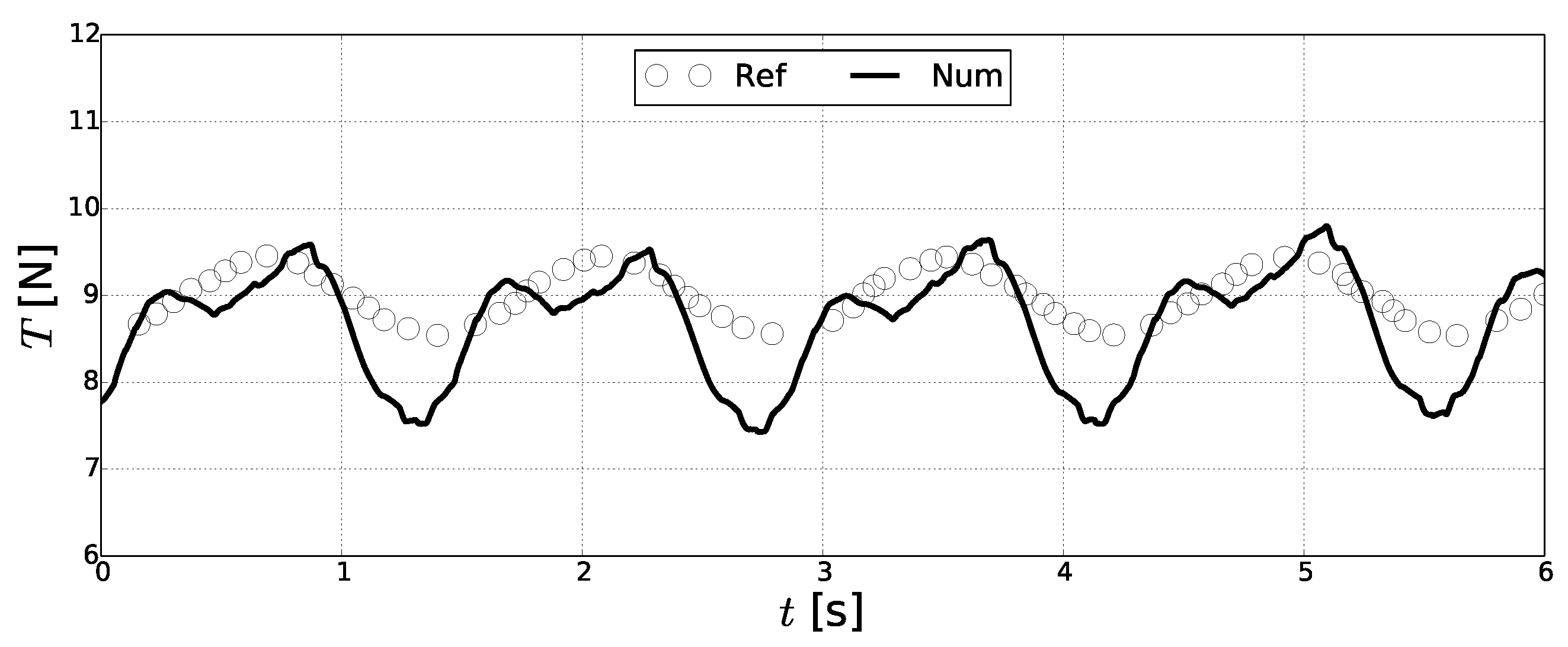
Hz. Further, the investigated model predicted lower motion amplitudes for the positive peaks. This is particularly prevalent for the surge motion, which indicates that the front mooring line might have caused this difference. The time series of the tension force magnitudes at the fairlead of the front mooring line is presented in
Figure 24 to investigate this. In comparison to the reference solution, similar frequencies and crests of the forces but lower force troughs were predicted. This difference might be the reason for the slightly different motions of the structure.
Further insights into the influence of bending stiffness on the motion of moored, floating structures was provided by additional simulations with increased stiffness values.
Figure 21,
Figure 22 and
Figure 23 present the amplitudes and frequencies of the motions for different bending stiffnesses. The reference solution from above, which is only available for the original bending stiffness, is also shown for comparison’s sake. It was first noticed that the frequencies of the heave and surge motions seem not to have been influenced by the increased stiffness. In contrast, the amplitudes of these motions increased by up to
and
respectively, and the pitch amplitude decreased by up to
. The reason for this was the additional rotational momentum, which restrained the rotation of the structure. Thus, the wave energy was rather converted into the translational modes. This also involved an increase of the mooring tension forces. It was finally observed that the bending stiffness led to an increased pitch frequency due to the larger system stiffness.
6. Conclusions
A new approach for simulating the dynamics of mooring systems and their interactions with floating structures was presented in this paper. It was based on a geometrically exact beam model originally developed for slender flexible rods. An efficient solution for the arising system of equations was found from a quaternion description of the rotational deformations and a finite difference discretisation. Explicit time integration was utilised, in contrast to previous approaches. The fluid forces acting on the system were calculated from Morison’s formula and the assumption of hydrodynamic transparency. The resulting mooring model has the advantage over existing models that it can account not just for bending but also shearing and torsion effects. Several verification and validation cases showed that the model is of second-order accuracy and can accurately represent the structural deformations and tension force distributions of rods and mooring lines.
The mooring model was then coupled to a two-phase CFD solver to investigate moored, floating structures in waves. The applicability of this approach was shown for the semi-submersible floating offshore wind support structure of the DeepCwind OC4 project. Initial decay tests in heave and surge were conducted to study the convergence of the numerical model and determine the required number of grid points. Then, the motion of the structure in a regular wave was compared to previous numerical solutions. Good agreement for the amplitude and frequency of the heave, surge and pitch motion was shown. A study of the influences of increasing bending stiffness on these motions revealed only a minor change to the motion frequencies but significant effects on the amplitudes. The additional rotational momentum decreased the rotation of the structure so that the wave energy acted more strongly on the translational modes.
The presented development of a dynamic mooring model is only one possible application for geometrically exact beam theory. Within further research, the same model will be applied to other slender marine structures, such as monopiles, offshore wind turbine towers and floaters. Additionally, electrical submarine cables might be of interest, as they do not only experience axial elongation but also torsion in the helical armour [
55]. Further, the comparison to the analytical solution for the forced vibration of a pinned rod revealed a principal deviation of the chosen numerical approach. Previous research showed better results using finite element methods. Within further developments, it has to be investigated what causes the problems of the finite difference discretisation and whether the deviations can be avoided by switching to a finite element solution.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}