
Visible Fidelity Collector of a Zooplankton Sample from the Near-Bottom of the Deep Sea

 ,
,  , and
, and
Abstract
:1. Introduction
2. Methods
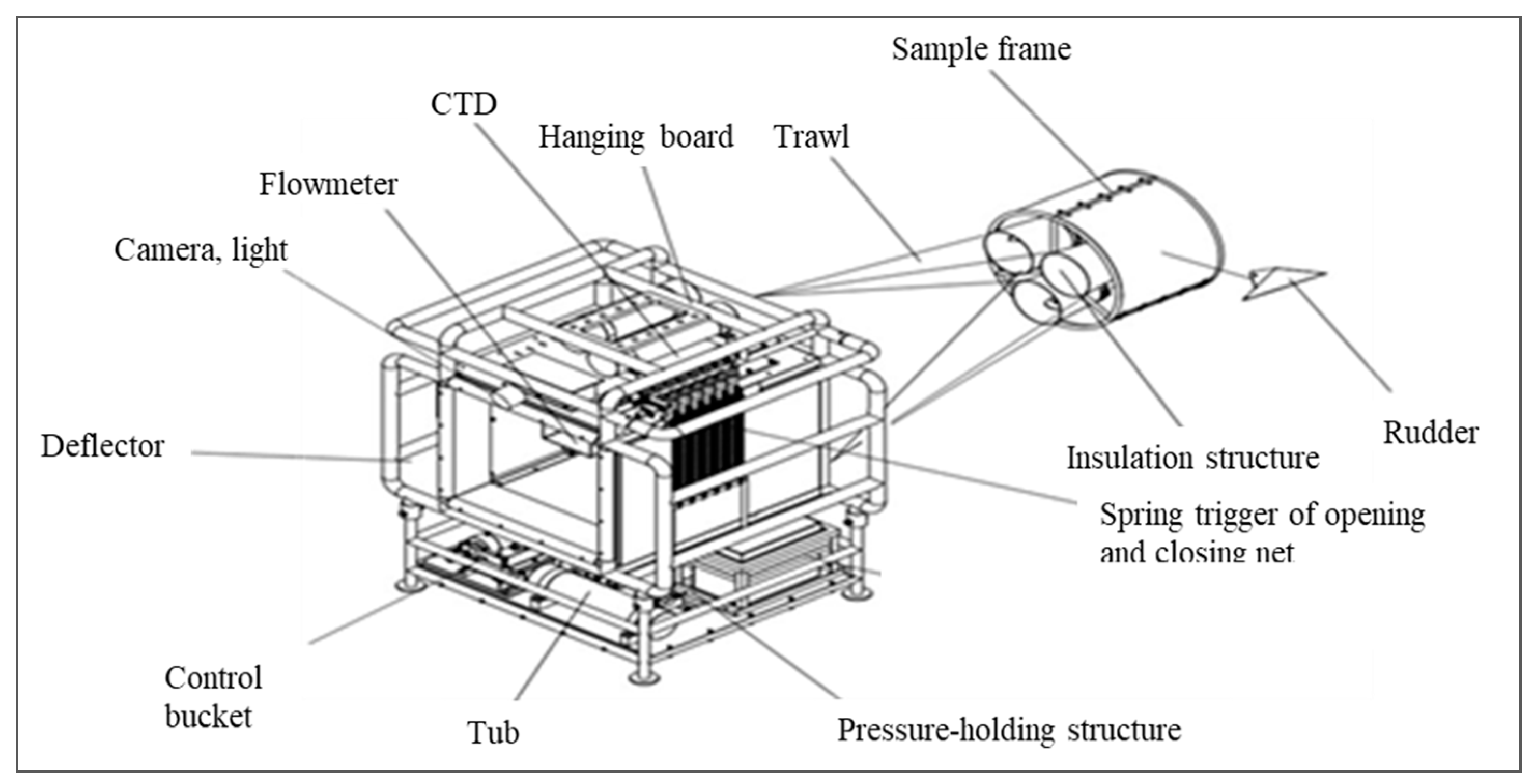
2.1. Multi-Net Visible Collector
- Maximum design working depth: 4000 m;
- Number of trawl nets: 3;
- Network port area: 0.5 m2
- The effective volume of the sample barrel: ≥0.25 L;
- The pressure in the sample storage bin shall not be lower than 80% of the original pressure at the sampling point within 6 h after boarding;
- The temperature rise in the sample storage bin after boarding does not exceed the original temperature of 8 °C;
- Hybrid transmission of the underwater power supply and data images are realized with transmission power ≥1.5 kw and transmission distance ≥6 km;
- The environmental parameters transmitted in real time include temperature, salinity, depth, turbidity, and dissolved oxygen;
- The total weight of the trailer body: 1.2 tons;
- Outer frame size: 1.5 m × 1 m × 2 m.
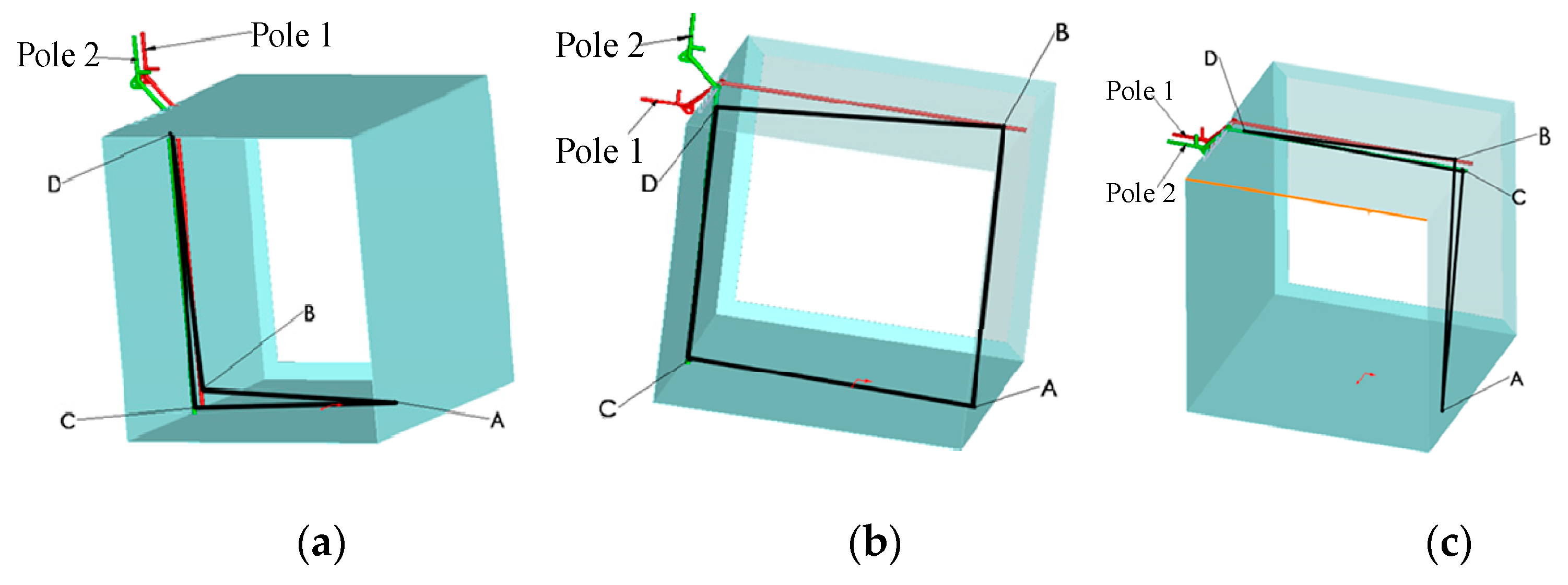
2.1.1. Sampling Principle
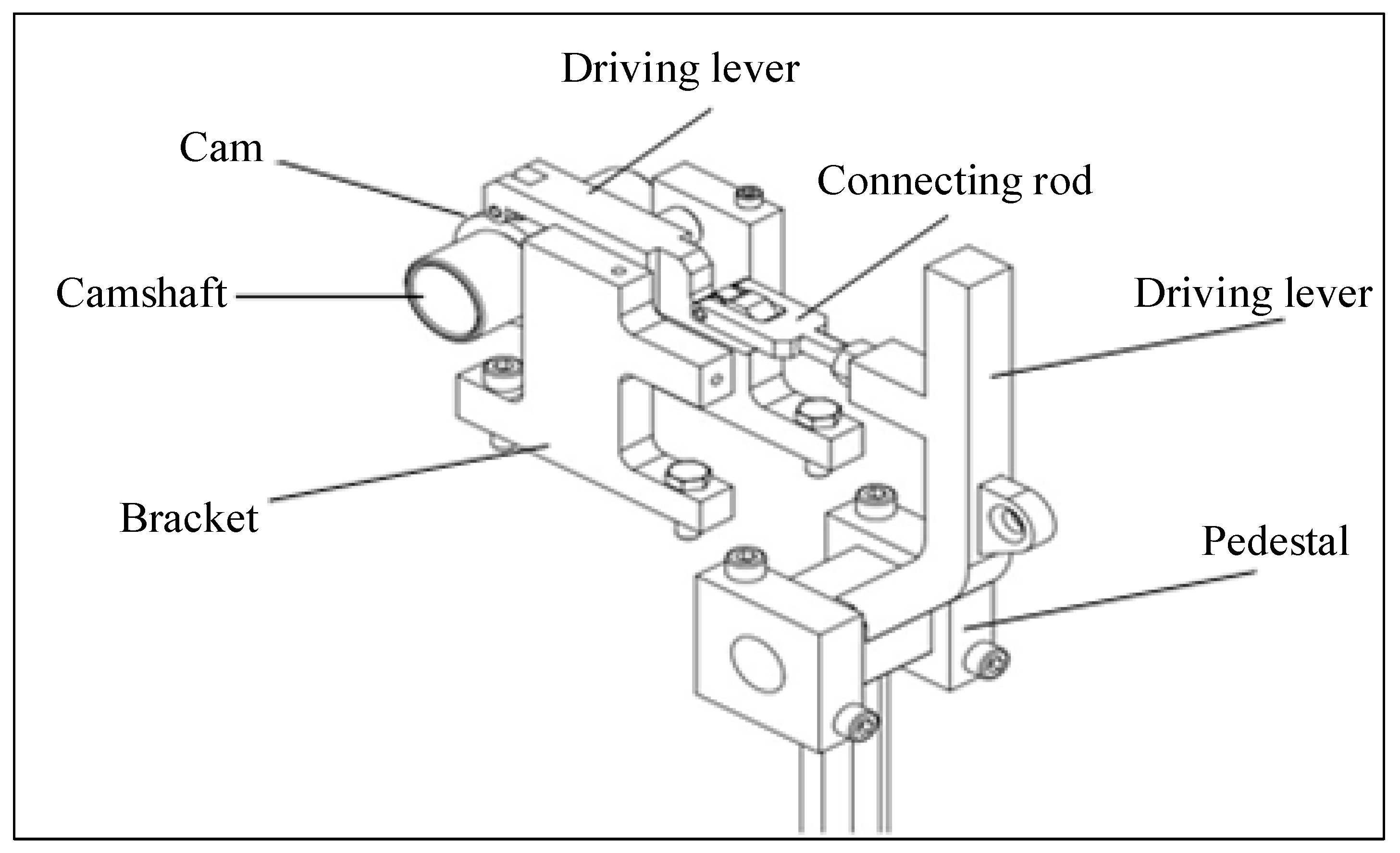
2.1.2. The Spring-Triggered Switch
2.2. Temperature Retention System
2.3. Control System
3. Results
3.1. The Field Assessment
3.2. Experimental Results
4. Discussion and Conclusions
4.1. Analysis of Failure to Close the Trawl Net Port
4.2. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Danovaro, R.; Snelgrove, P.V.; Tyler, P. Challenging the paradigms of deep-sea ecology. Trends Ecol. Evol. 2014, 29, 465–475. [Google Scholar] [CrossRef] [PubMed]
- Danovaro, R.; Corinaldesi, C.; Dell’Anno, A.; Snelgrove, P.V.R. The deep-sea under global change. Curr. Biol. 2017, 27, R1–R6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- O’Dor, R.K.; Fennel, K.; Berghe, E.V. A one ocean model of biodiversity. Deep-Sea Res. II 2009, 56, 1816–1823. [Google Scholar] [CrossRef]
- Danovaro, R.; Carugati, L.; Boldrin, A.; Calafat, A.; Canals, M.; Fabres, J.; Finlay, K.; Heussner, S.; Miserocchi, S.; Sanchez-Vidal, A. Deep-water zooplankton in the Mediterranean Sea: Results from a continuous, synchronous sampling over different regions using sediment traps. Deep Sea Res. Part I Oceanogr. Res. Pap. 2017, 126, 103–114. [Google Scholar] [CrossRef]
- Brandt, A.; Gutt, J.; Hildebrandt, M.; Pawlowski, J.; Schwendner, J.; Soltwedel, T.; Thomsen, L. Cutting the umbilical: New technological perspectives in Benthic deep-sea research. J. Mar. Sci. Eng. 2016, 4, 36. [Google Scholar] [CrossRef] [Green Version]
- Weikert, H.; Koppelmann, R.; Wiegratz, S. Evidence of episodic changes in deep-sea mesozooplankton abundance and composition in the Levantine sea Eastern Mediterranean. Mar. Syst. 2001, 30, 221–239. [Google Scholar] [CrossRef]
- Bollens, S.M.; Rollwagen-Bollens, G.; Quenette, J.A.; Bochdansky, A.B. Cascading migrations and implications for vertical fluxes in pelagic ecosystems. Plankton Res. 2011, 33, 349–355. [Google Scholar] [CrossRef]
- Siokou-Frangou, I.; Christaki, U.; Mazzocchi, M.G.; Montresor, M.; Ribera d’Alcalá, M.; Vaqué, D.; Zingone, A. Plankton in the open Mediterranean Sea: A review. Biogeosciences 2010, 7, 1543–1586. [Google Scholar] [CrossRef] [Green Version]
- Sevadjian, J.C.; McManus, M.A.; Benoit-Bird, K.J.; Selph, K.E. Shoreward advection of phytoplankton and vertical re-distribution of zooplankton by episodic near-bottom water pulses on an insular shelf: Oahu, Hawaii. Cont. Shelf Res. 2012, 50–51, 1–15. [Google Scholar] [CrossRef]
- Wiebe, P.; Beardsley, R.; Mountain, D.; Bucklin, A. U.S. GLOBEC Northwest Atlantic\Georges Bank program. Oceanography 2002, 15, 13–29. [Google Scholar] [CrossRef]
- Johnson, D.L.; Fogarty, M.J. Intercalibration of MOCNESS and Bongo nets: Assessing relative efficiency for ichthyoplankton. Prog. Oceanogr. 2013, 108, 43–71. [Google Scholar] [CrossRef]
- Huse, G.; Johannessen, A.; Fossum, P. A comparison of the length distributions of larval capelin (Mallotus villosus) taken by Gulf III, MIK and MOCNESS collectors. J. Appl. Ichthyol. 1996, 12, 135–136. [Google Scholar] [CrossRef]
- Sameoto, D.D.; Jaroszynski, L.O.; Fraser, W.B. BIONESS, a New Design in Multiple Net Zooplankton Collector s. Can. J. Fish. Aquat. Sci. 1980, 37, 722–724. [Google Scholar] [CrossRef]
- Guglielmo, L.; Arena, G.; Brugnano, C.; Guglielmo, R.; Granata, A.; Minutoli, R.; Sitran, R.; Zagami, G.; Bergamasco, A. Mi-croNESS: An innovative opening–closing multinet for under pack-ice zooplankton sampling. Polar Biol. 2015, 38, 2035–2046. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample No. | Sampling Time | Working Depth | Pressure (MPa) | Temperature (℃) | Pressure (MPa) (6 h Later) | Temperature (℃) (6 h Later) | Sampling |
|---|---|---|---|---|---|---|---|
| 1 | 15 min | 2685 | 26.00 | 3.369 | 24.2 | 10.10 | Yes |
| 2 | 15 min | 3487 | 34.00 | 3.020 | 31.0 | 7.60 | Yes |
| 3 | 15 min | 3016 | 0.35 | 17.200 | / | / | Yes |
| 1 | 15 min | 3205 | 32.00 | 3.112 | 29.8 | 8.10 | Yes |
| 2 | 15 min | 3764 | 37.00 | 3.031 | 34.2 | 7.78 | Yes |
| 3 | 15 min | 3341 | 33.00 | 3.117 | 29.5 | 7.82 | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, J.; Chen, J.; Tian, Z.; Zhu, H.; Wang, C.; Yang, J.; Sheng, Q.; Zhang, D.; Fang, J. Visible Fidelity Collector of a Zooplankton Sample from the Near-Bottom of the Deep Sea. J. Mar. Sci. Eng. 2021, 9, 332. https://doi.org/10.3390/jmse9030332
Xiao J, Chen J, Tian Z, Zhu H, Wang C, Yang J, Sheng Q, Zhang D, Fang J. Visible Fidelity Collector of a Zooplankton Sample from the Near-Bottom of the Deep Sea. Journal of Marine Science and Engineering. 2021; 9(3):332. https://doi.org/10.3390/jmse9030332
Chicago/Turabian StyleXiao, Jing, Jiawang Chen, Zhenwei Tian, Hai Zhu, Chunsheng Wang, Junyi Yang, Qinghua Sheng, Dahai Zhang, and Jiasong Fang. 2021. "Visible Fidelity Collector of a Zooplankton Sample from the Near-Bottom of the Deep Sea" Journal of Marine Science and Engineering 9, no. 3: 332. https://doi.org/10.3390/jmse9030332