
A Semi-Analytical Model for Studying Hydroelastic Behaviour of a Cylindrical Net Cage under Wave Action



Abstract
:1. Introduction
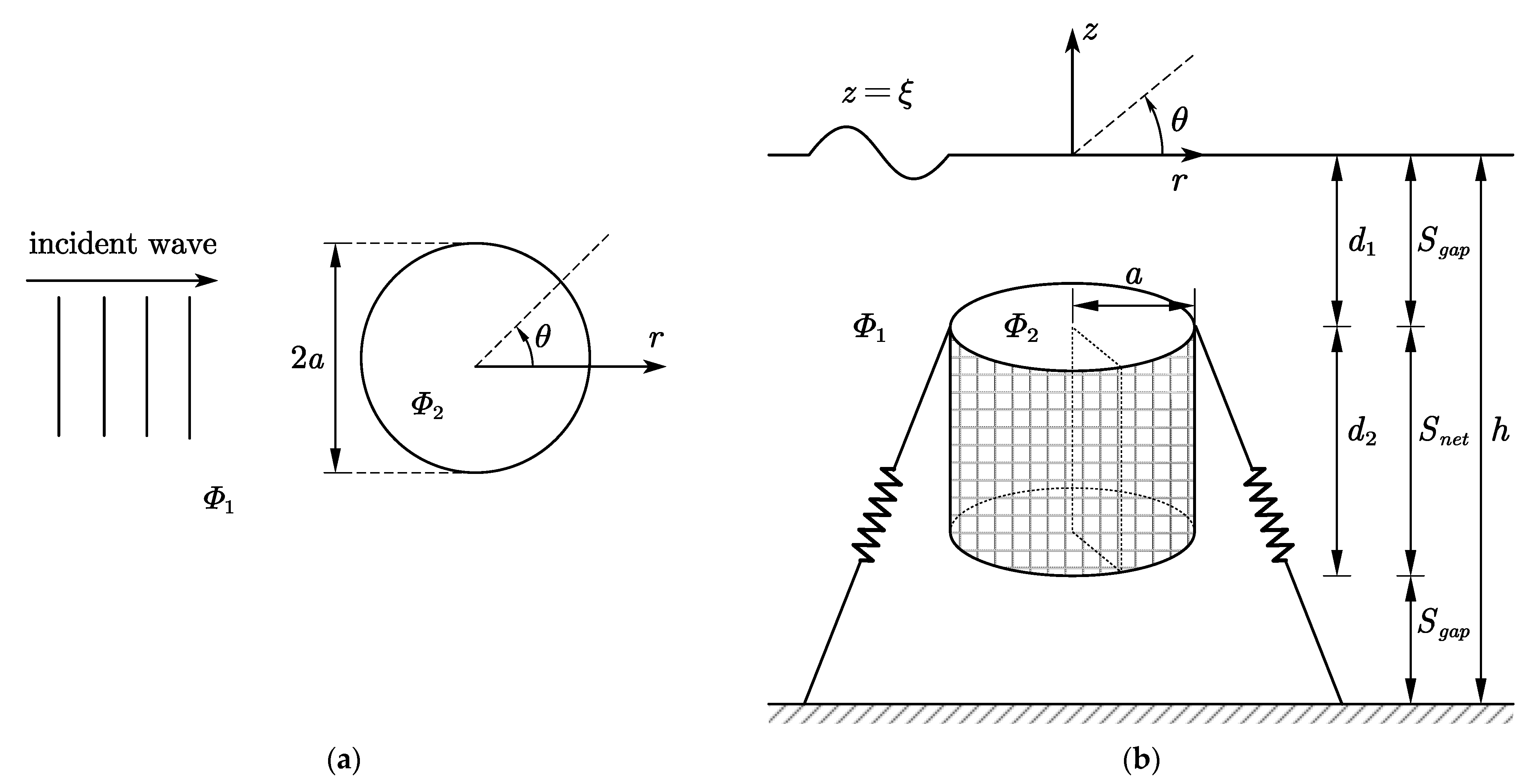
2. Problem Definition, Assumptions, Modelling, Governing Equation, and Boundary Conditions
2.1. Governing Equations
2.2. Boundary Conditions
3. Method of Solutions
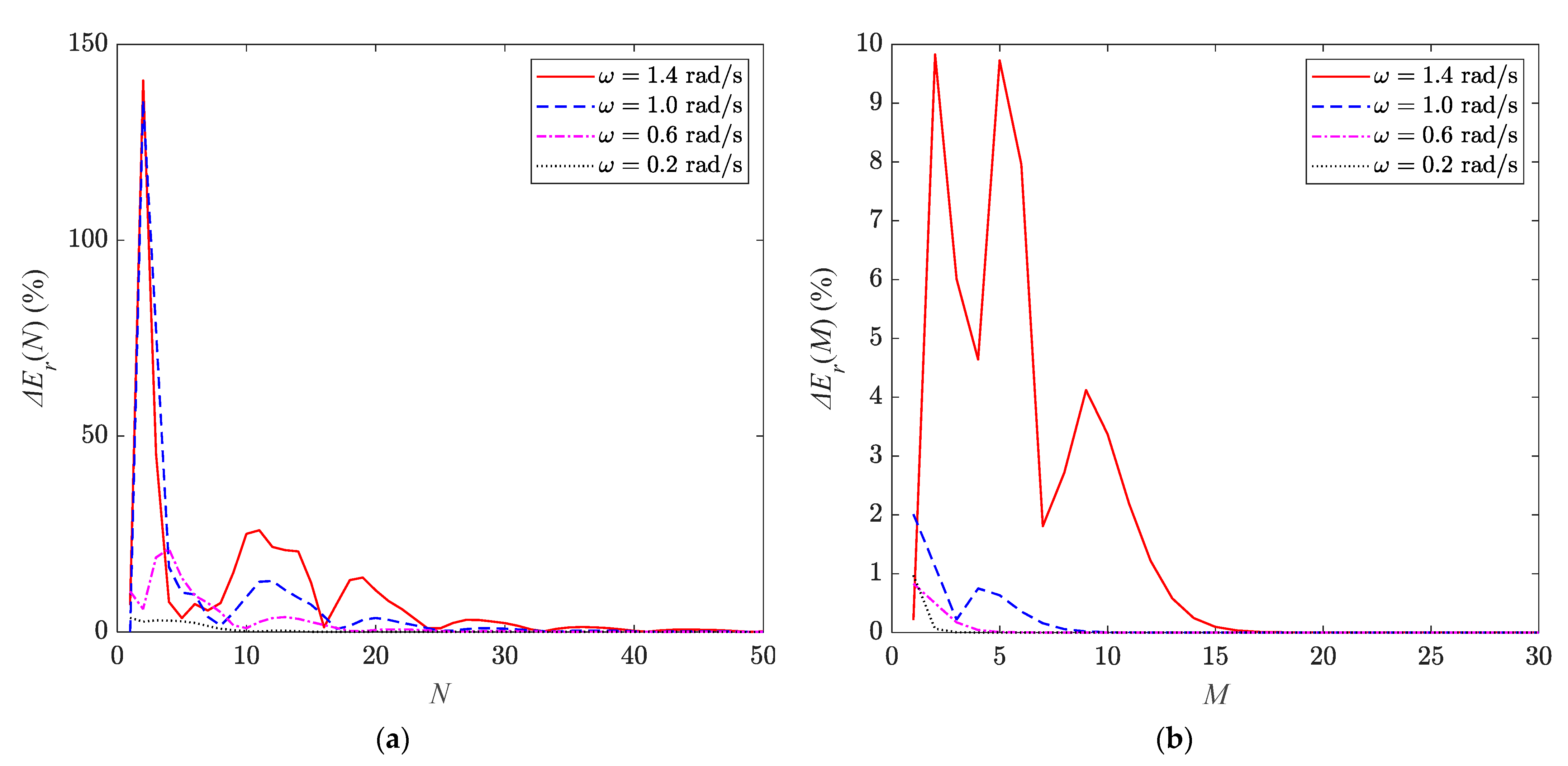
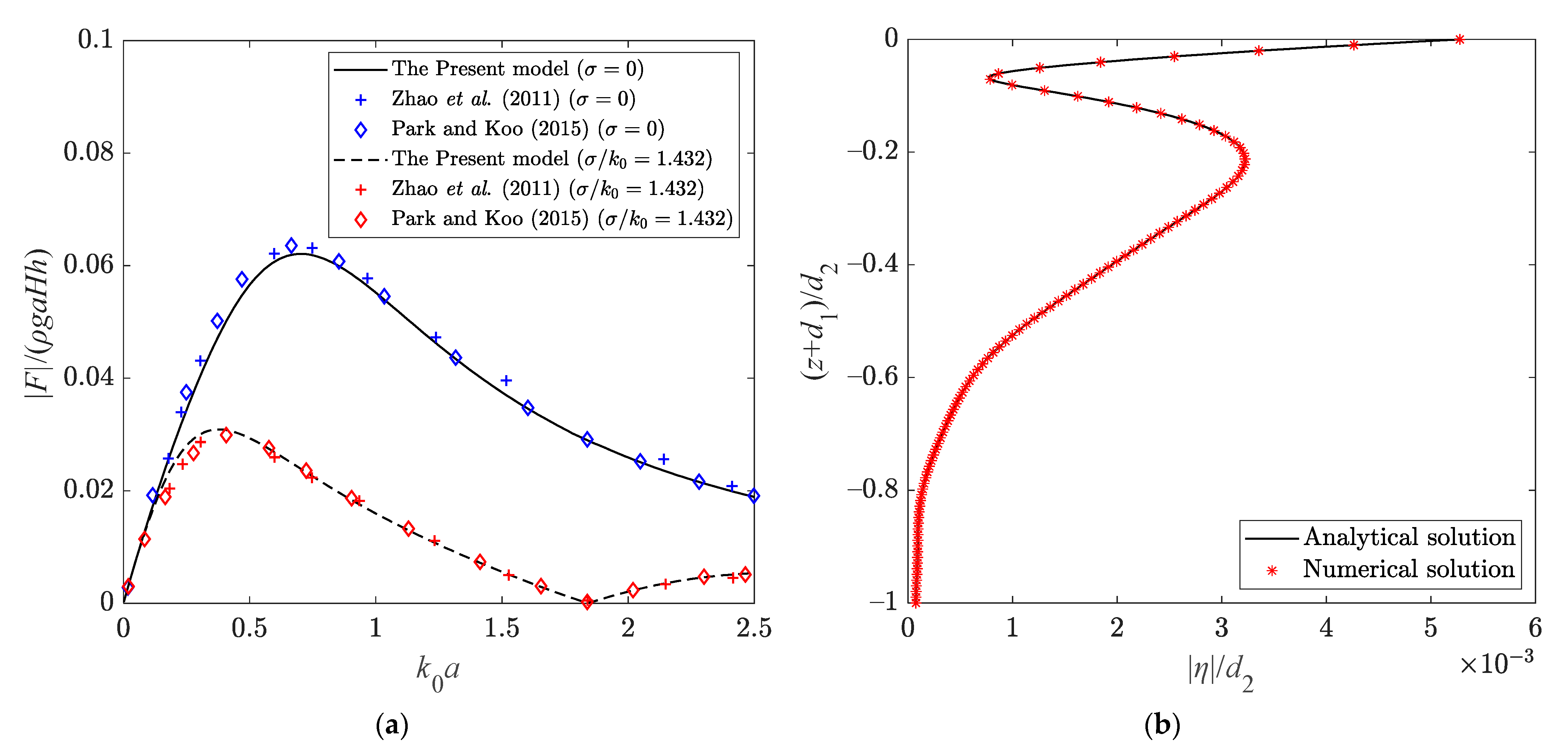
4. Convergence Studies and Model Validation
5. Hydroelastic Analysis of Fish Net Cage
5.1. Hydrodynamic Behaviours
5.2. Structural Dynamic Responses
6. Parametric Study
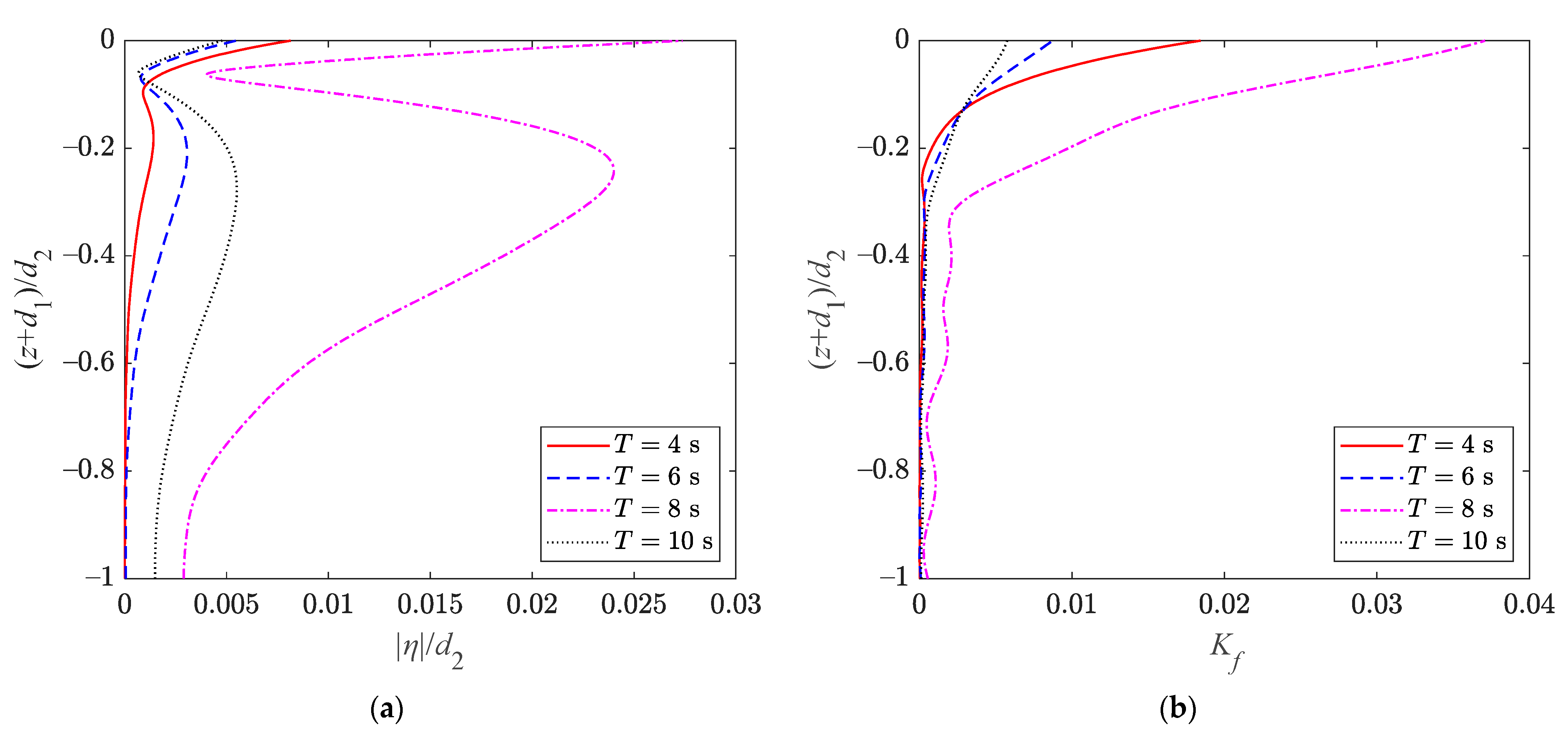
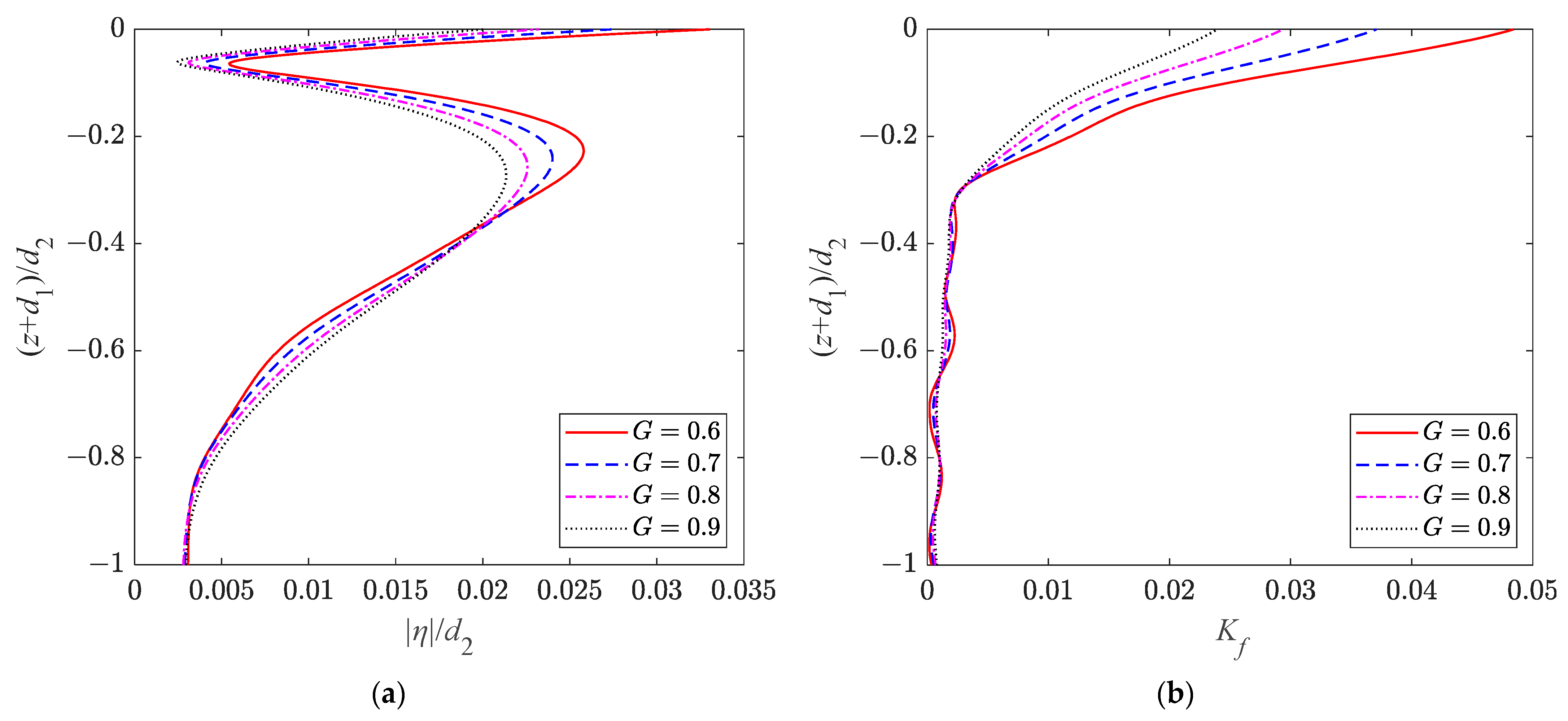
6.1. Hydrodynamic Conditions
6.2. Cage Dimensions
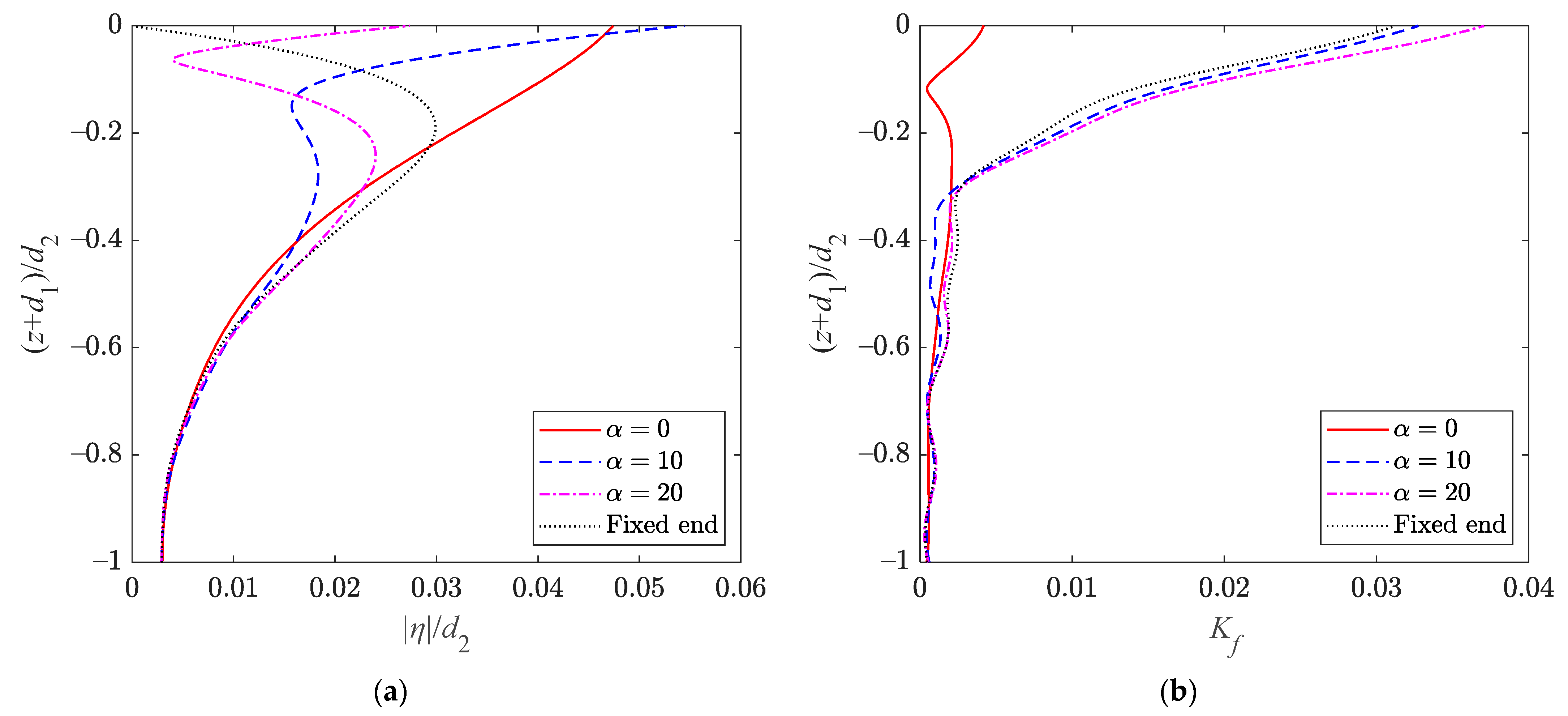
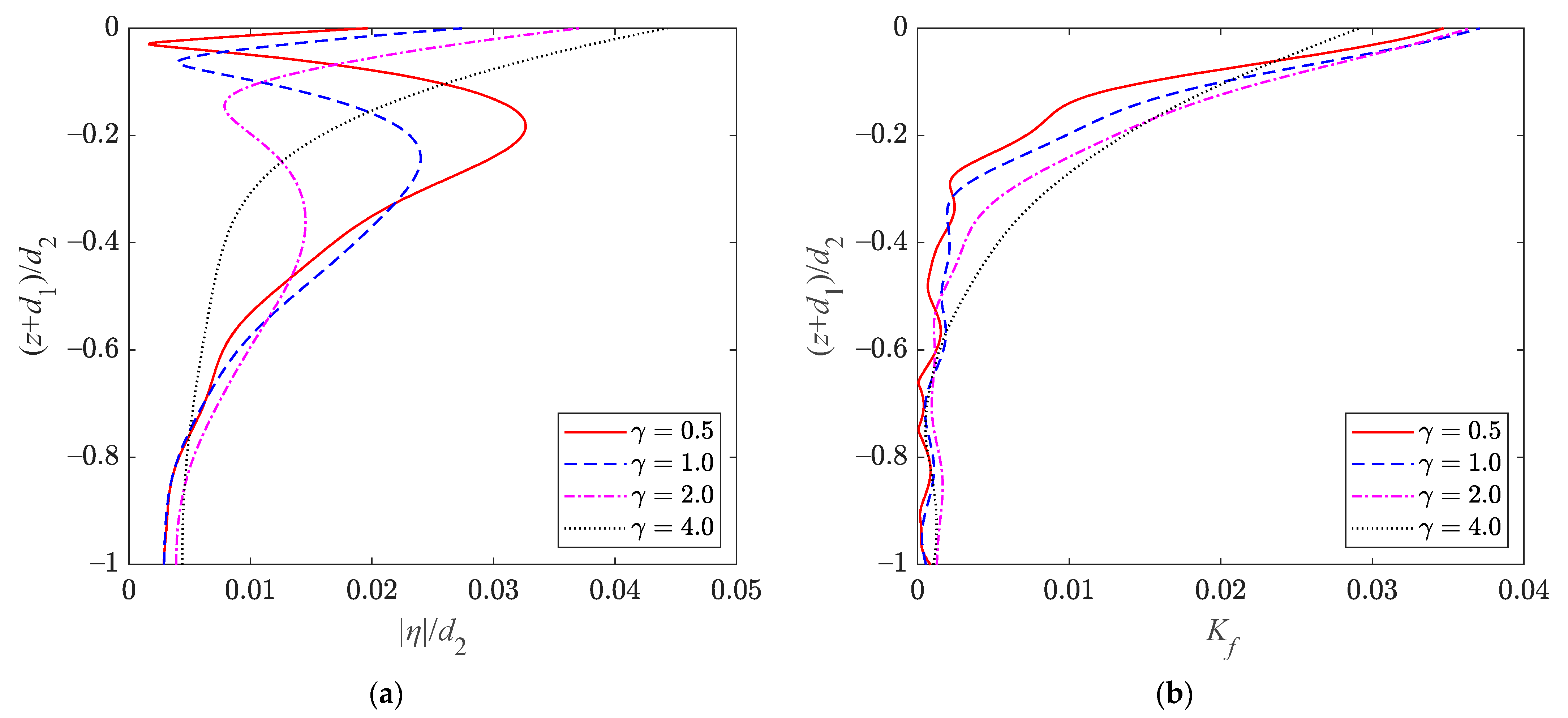
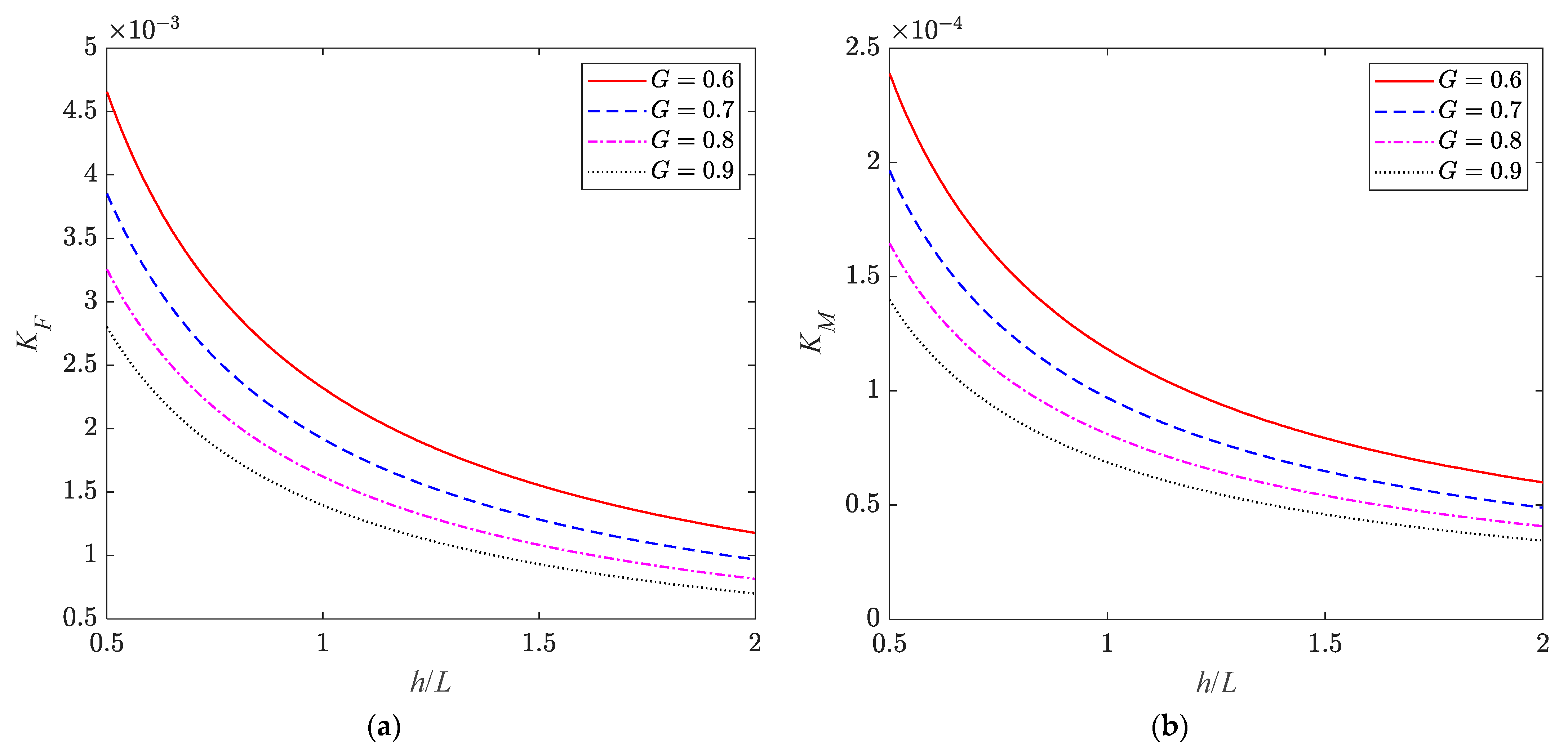
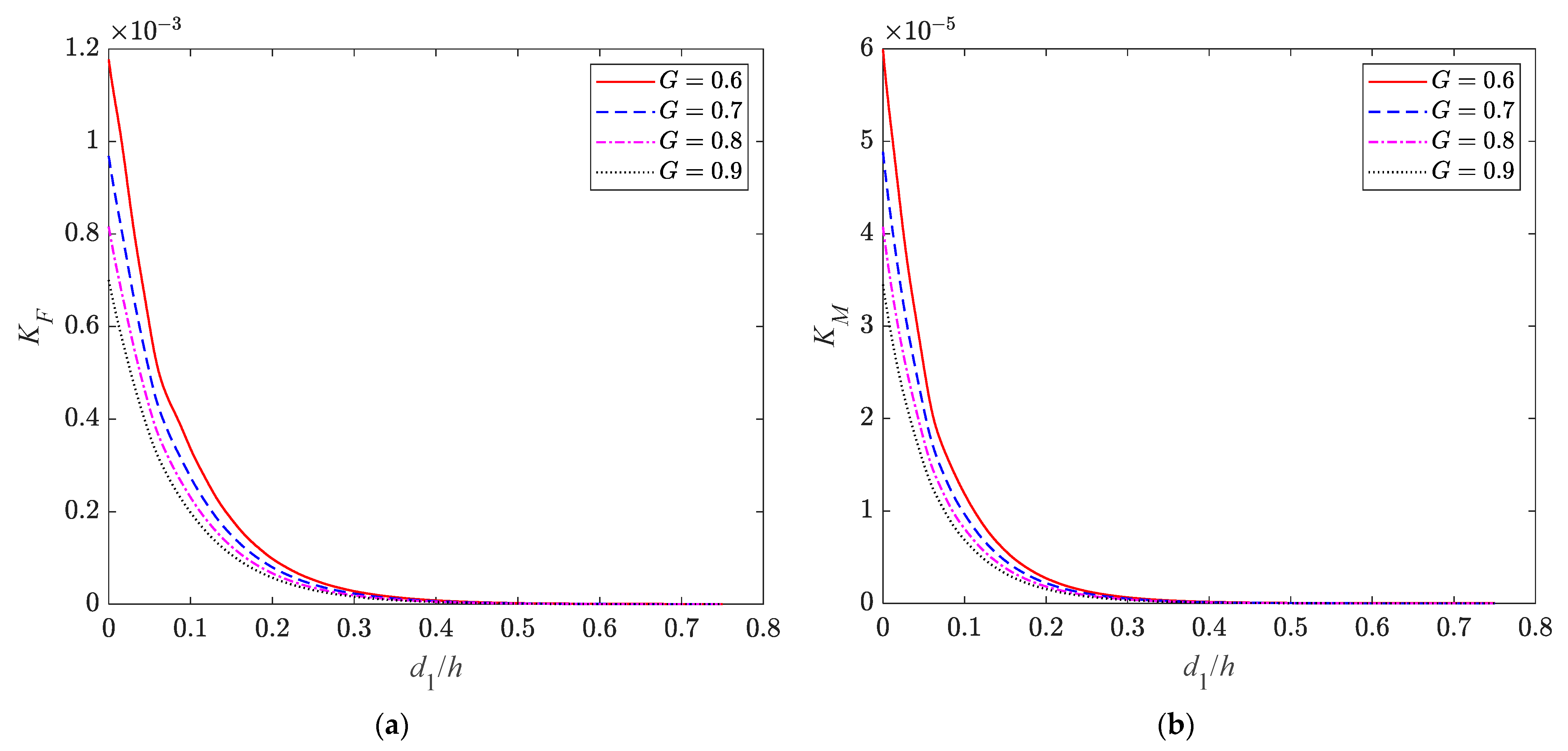
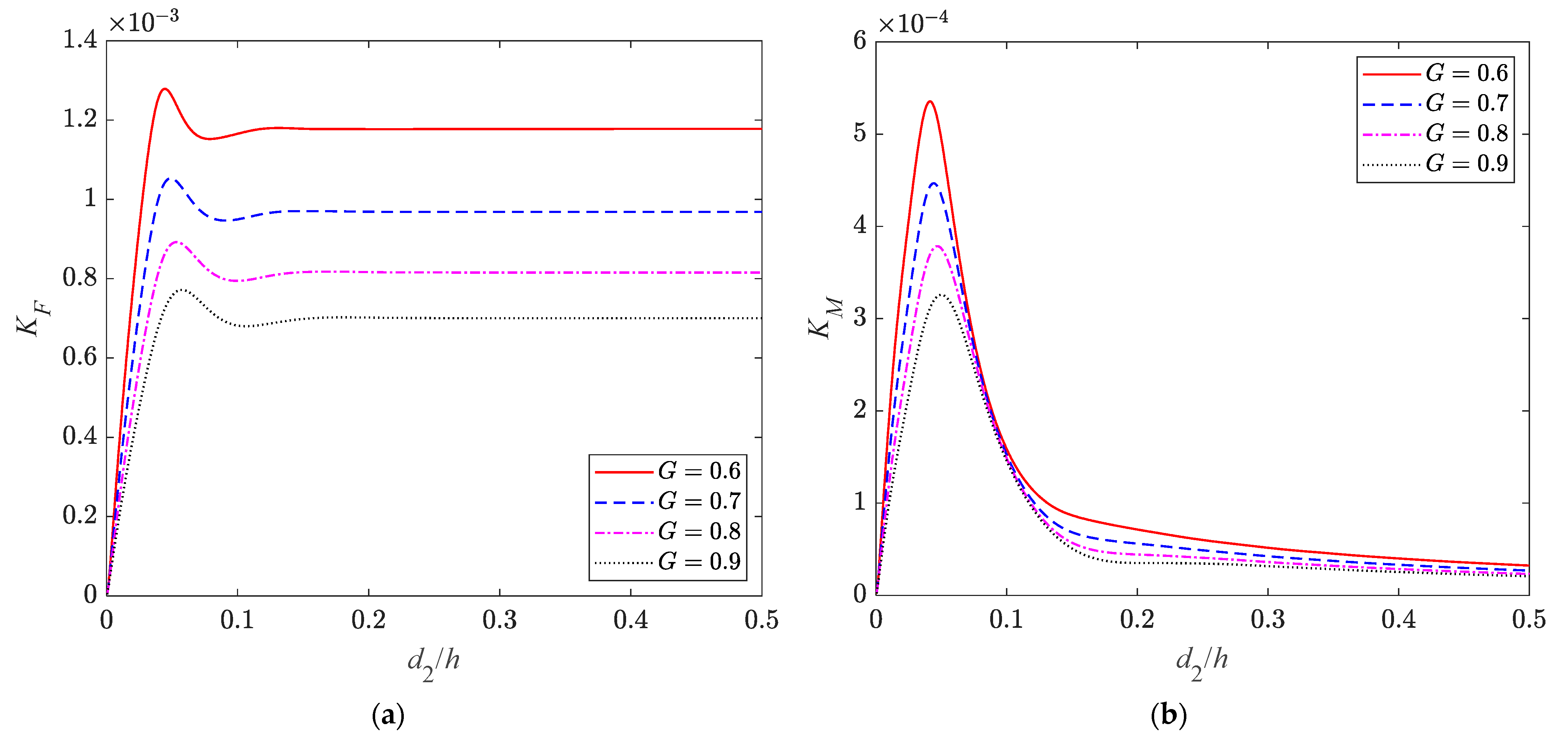
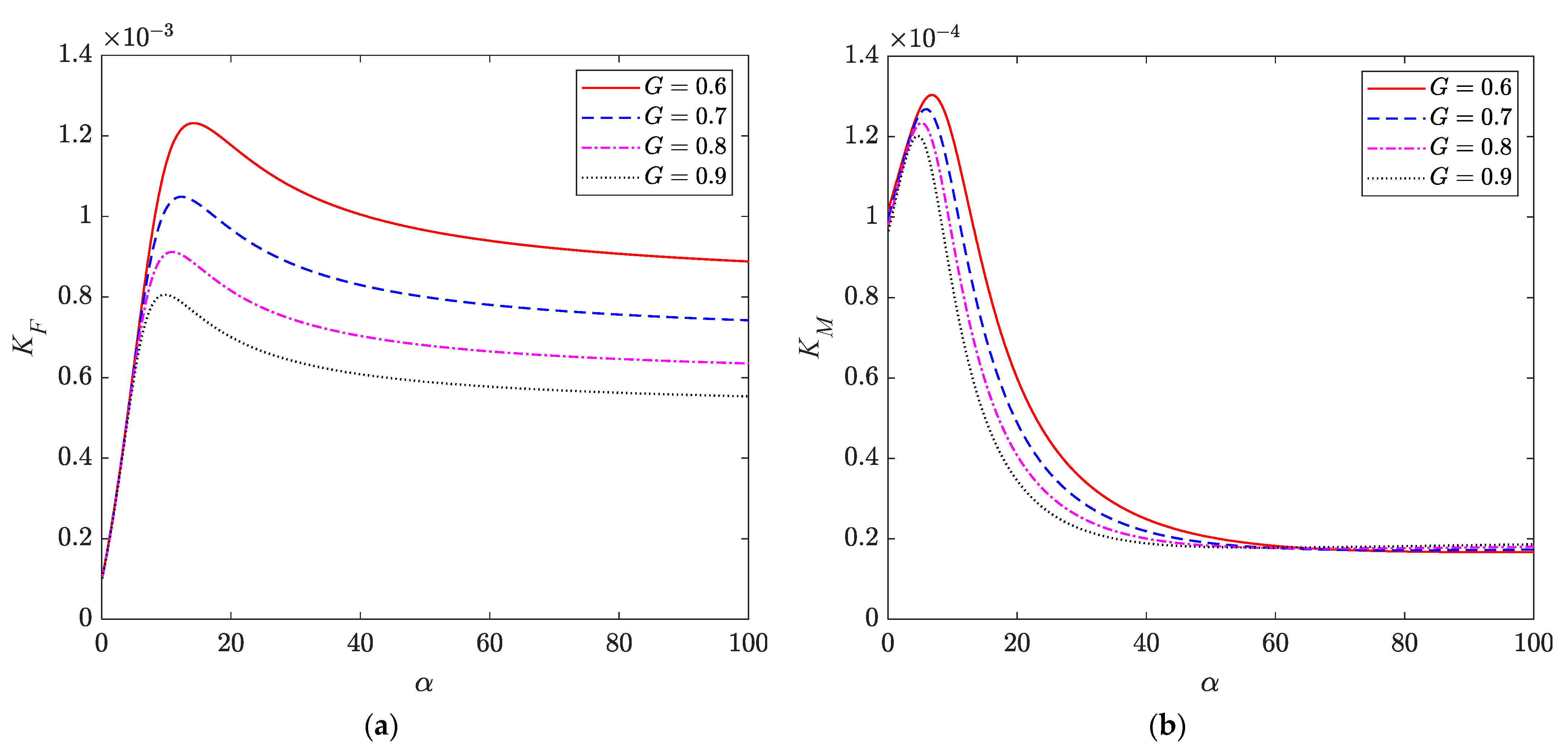
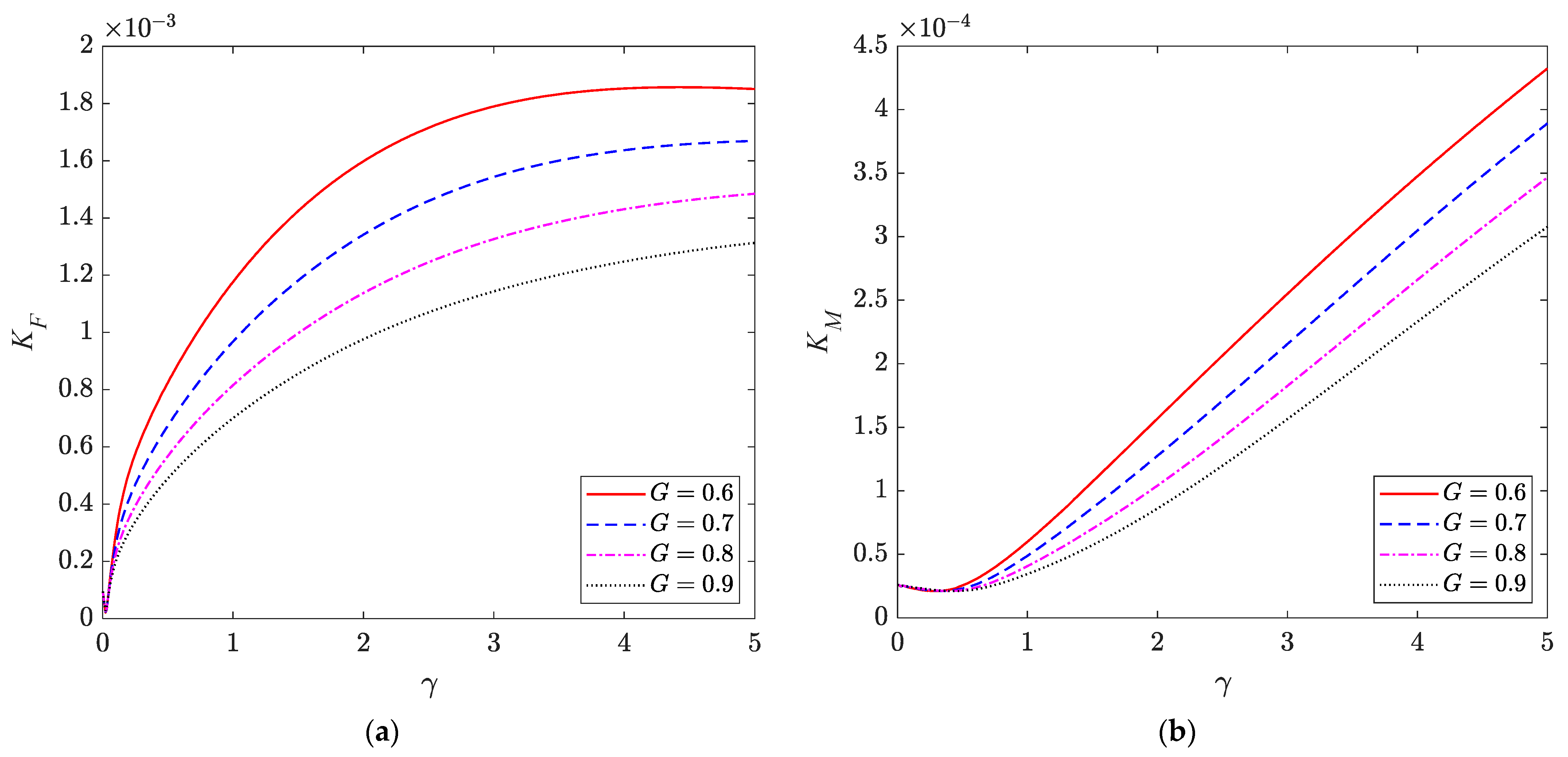
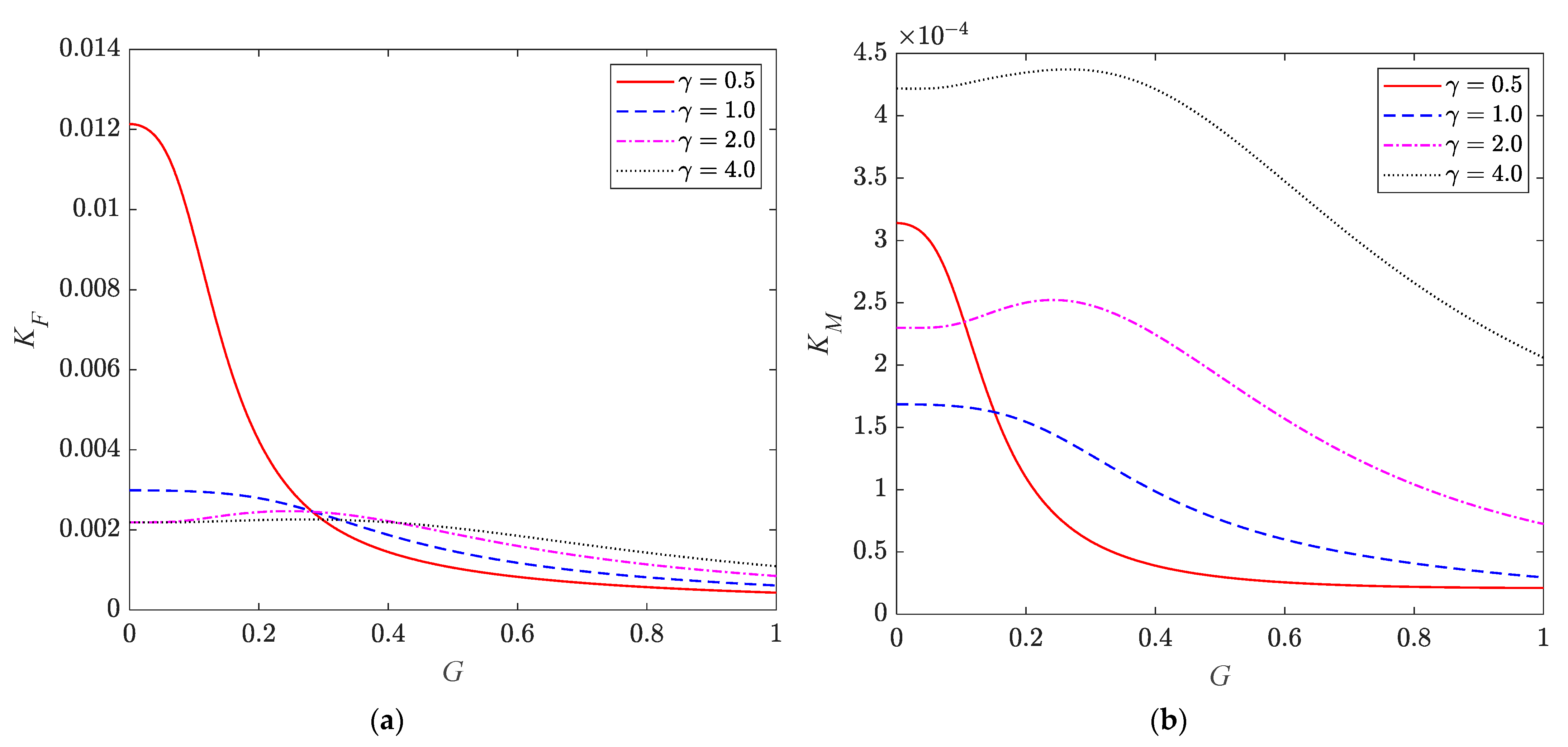
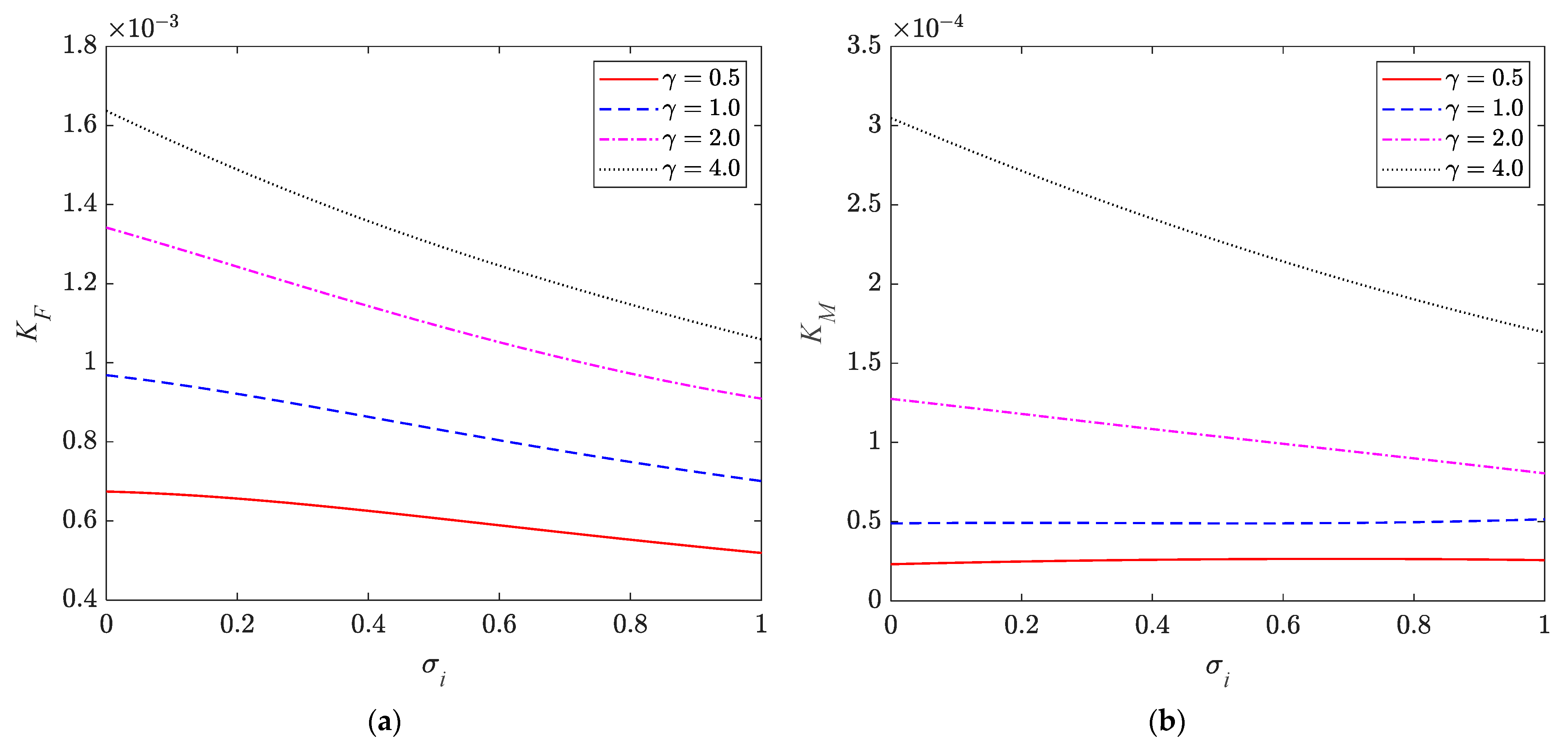
6.3. Structural Parameters
7. Conclusions
- (1)
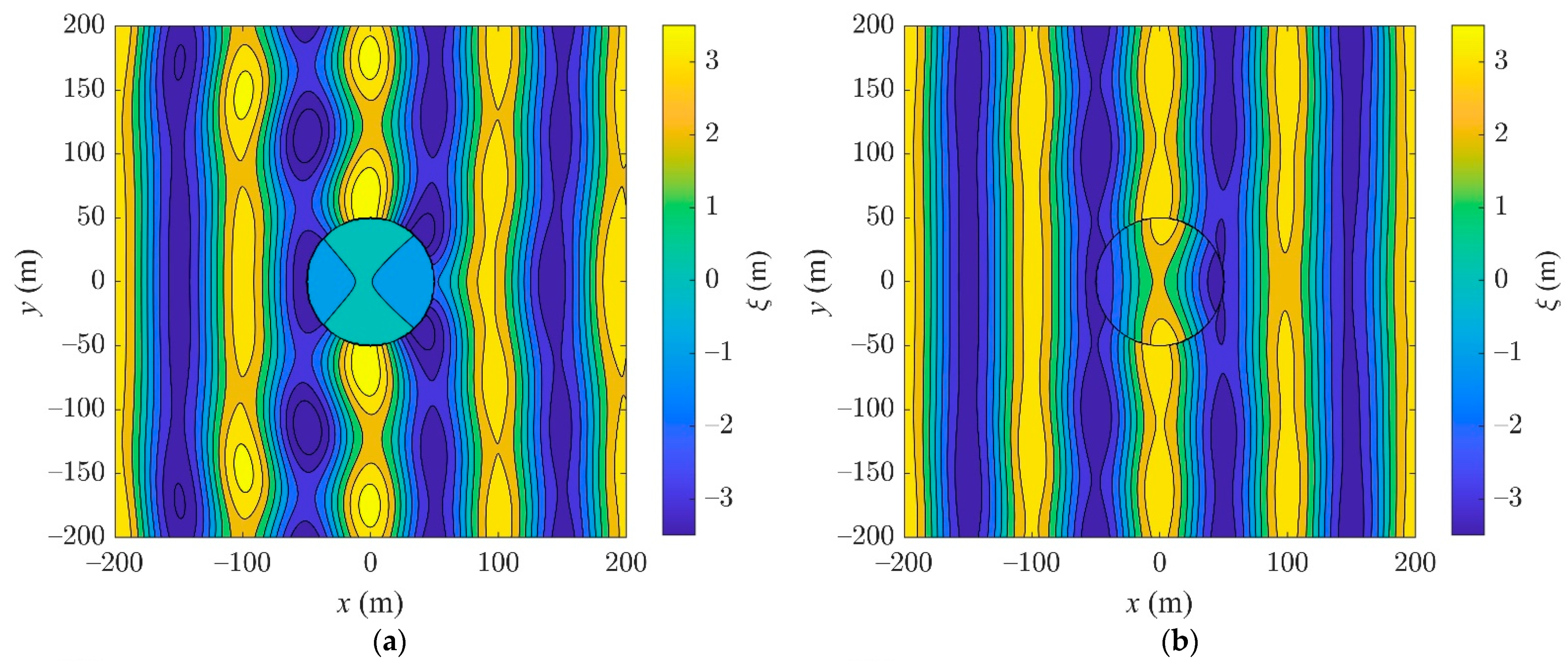
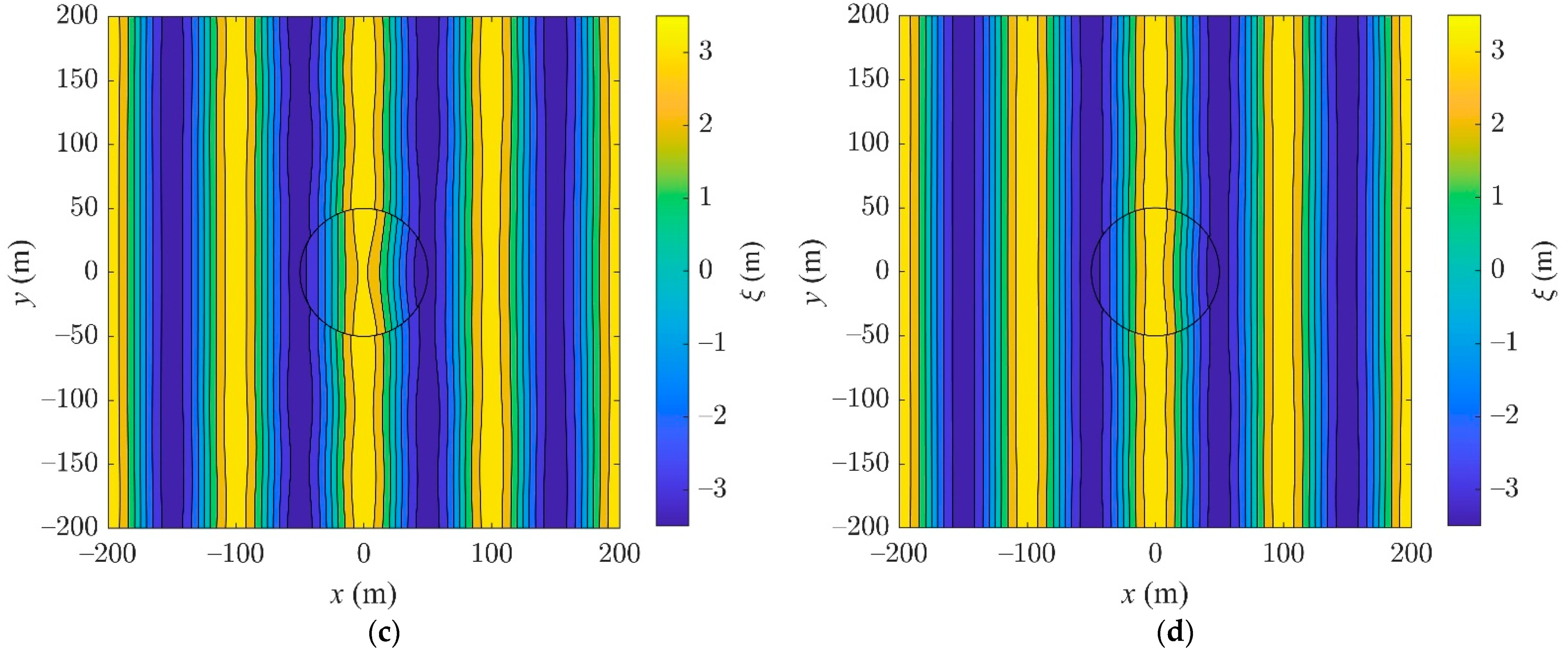
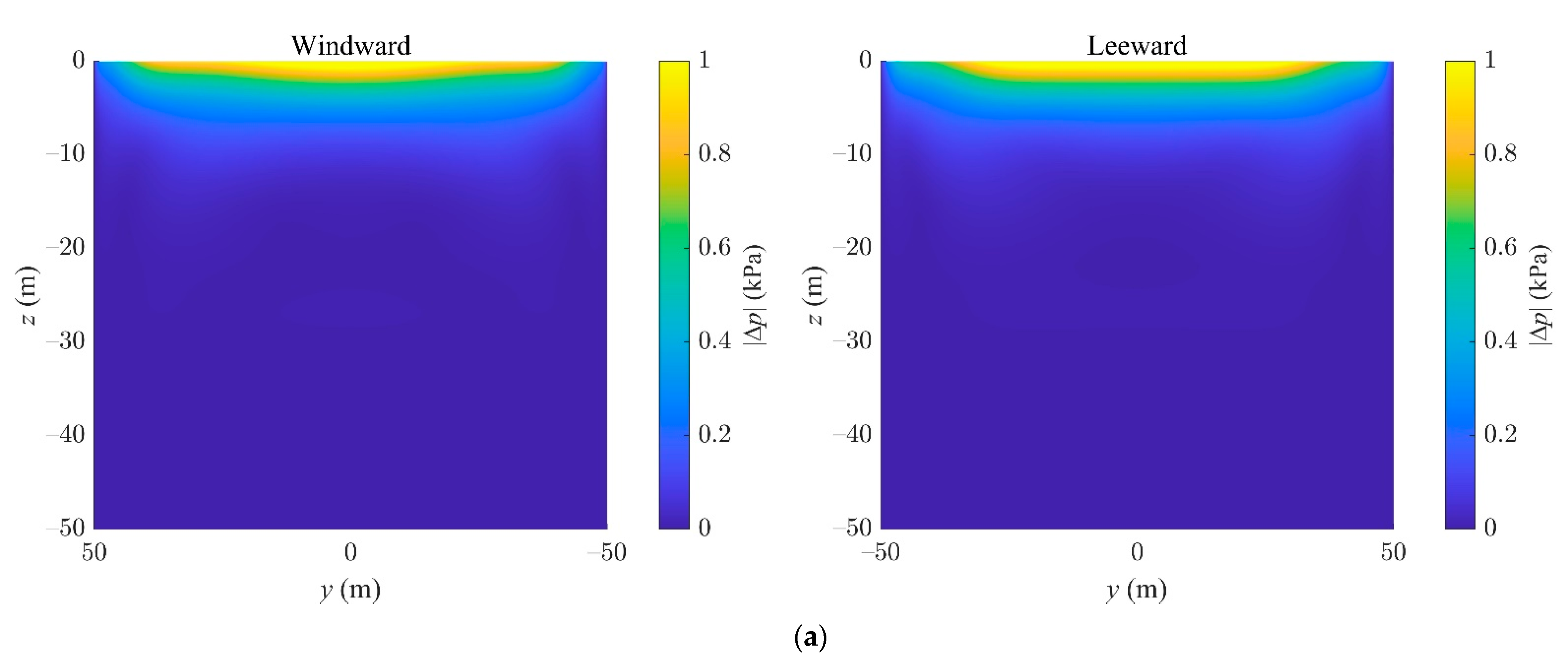
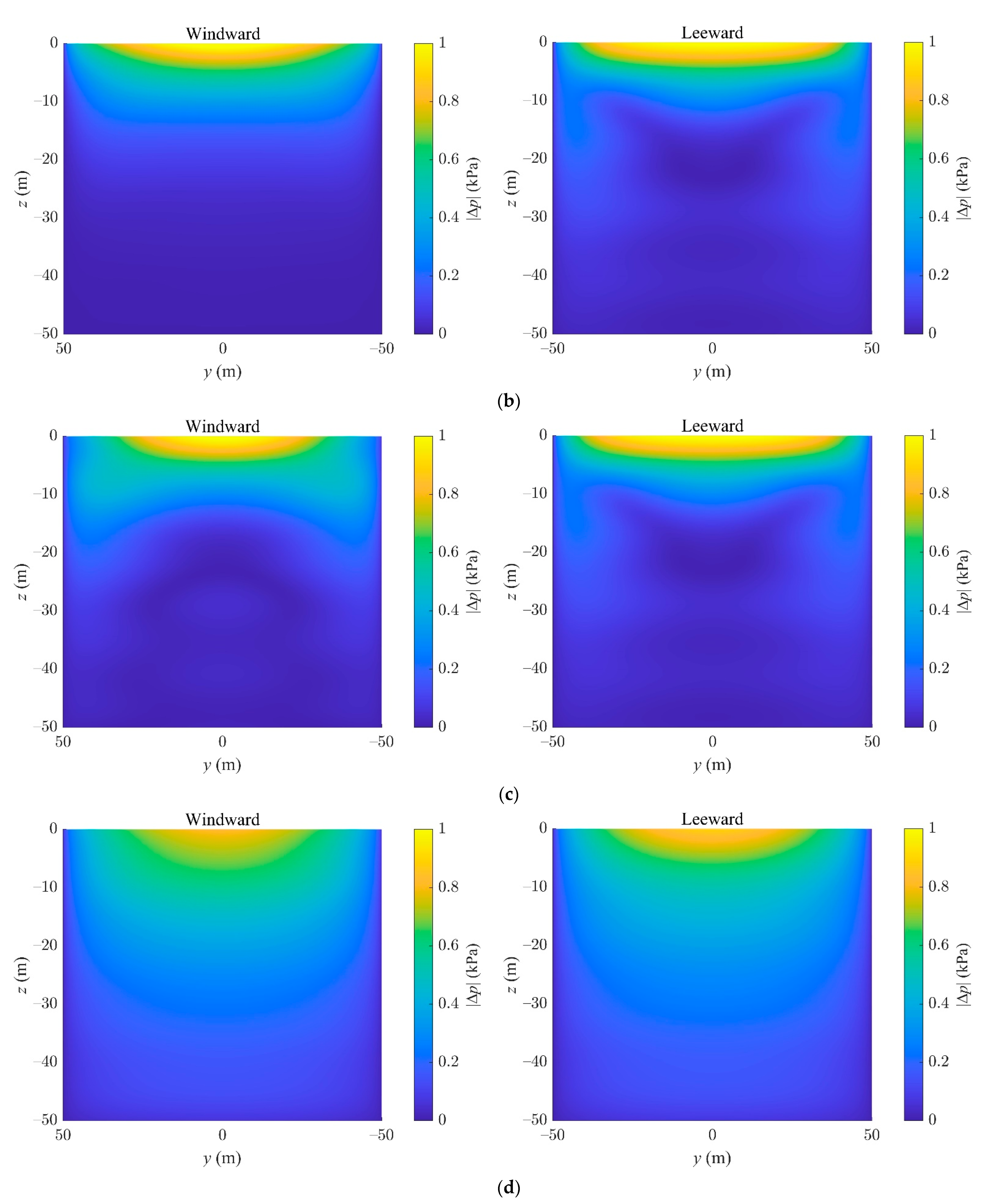
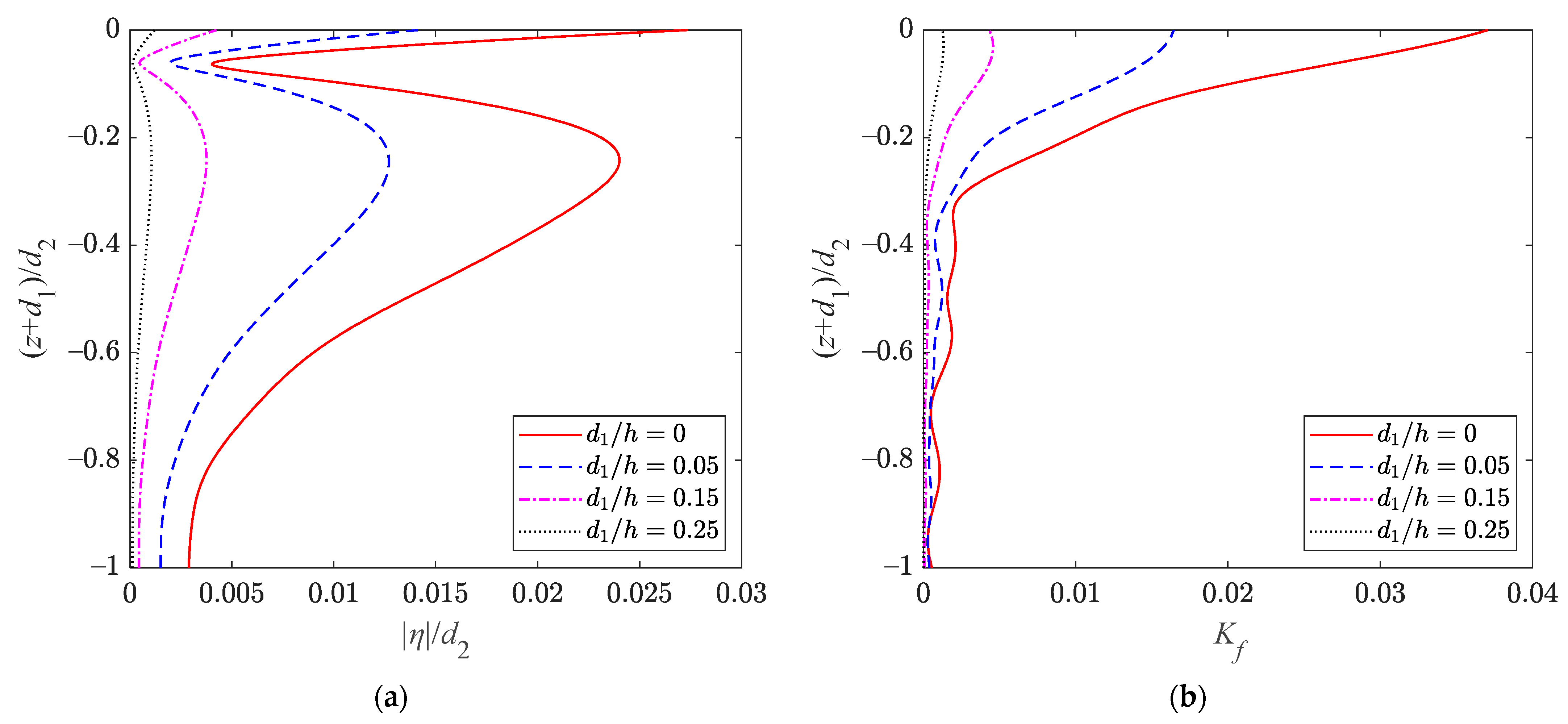
- The disturbance caused by the cage to the wave surface is weaker when the opening ratio of the net is greater than 0.3. The wave actions are stronger near the mean water level, as expected. Consequently, a submersible cage is recommended to avoid the high surface-wave energy.
- (2)
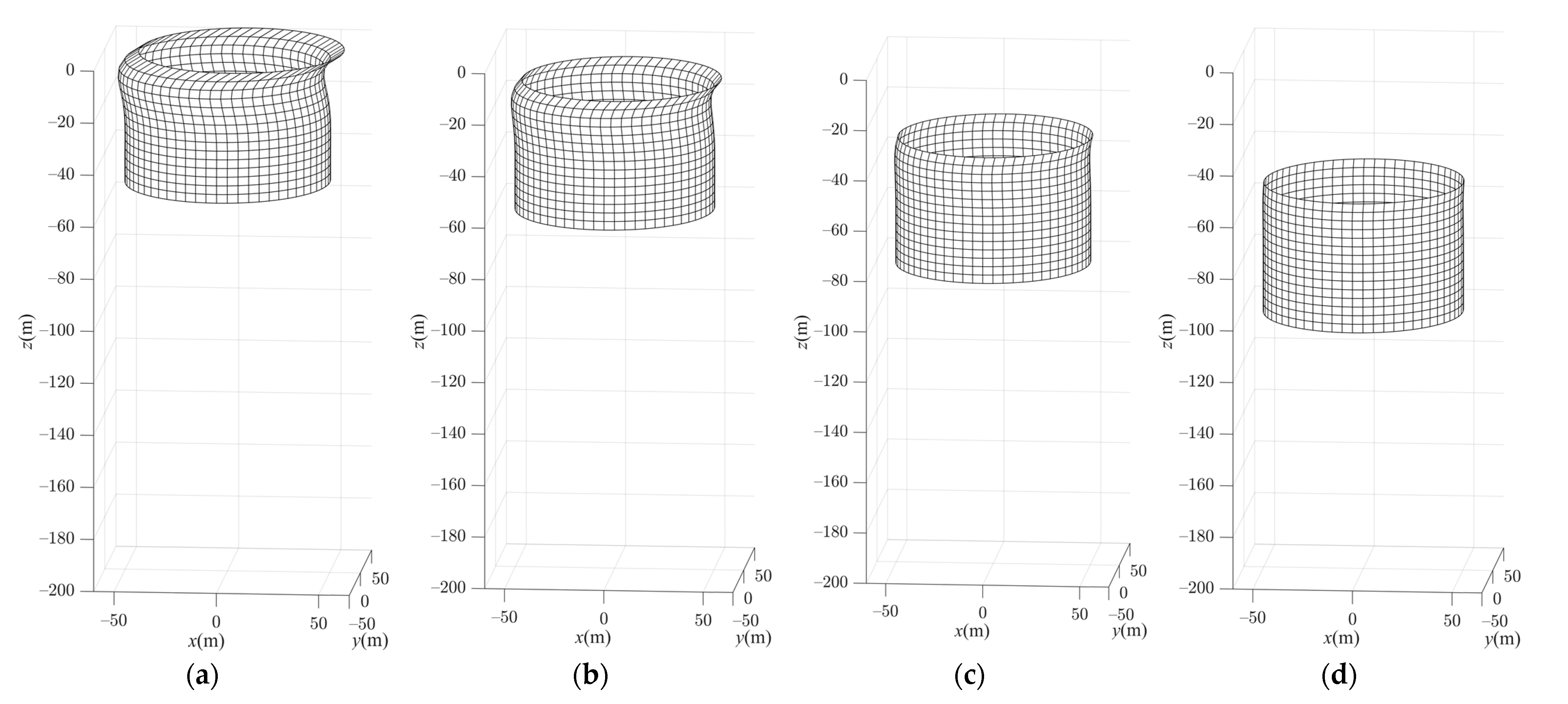
- Under different mooring stiffness and axial tension in the net, the deflection amplitude of the cage presents different distribution characteristics.
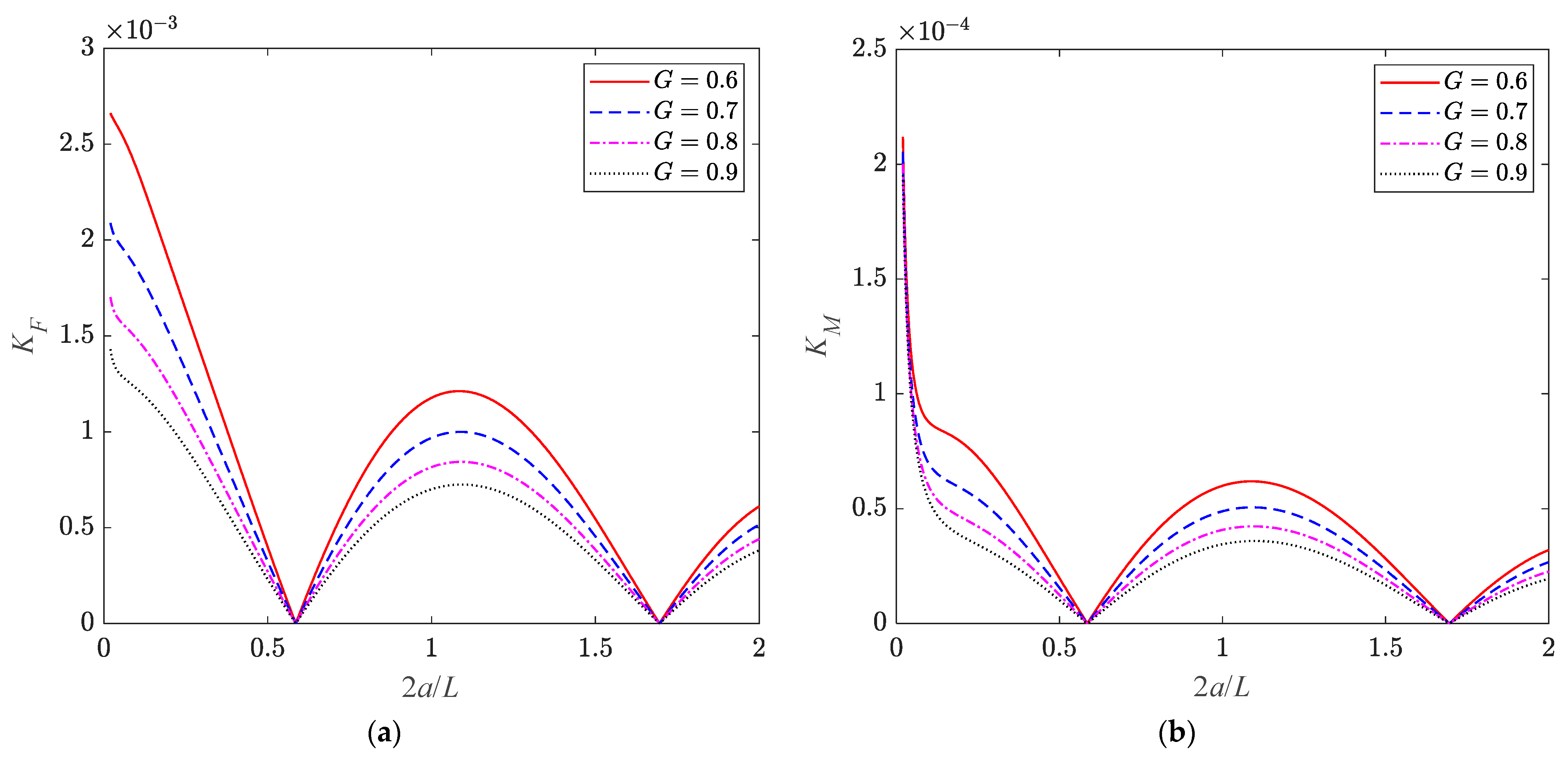
- (3)
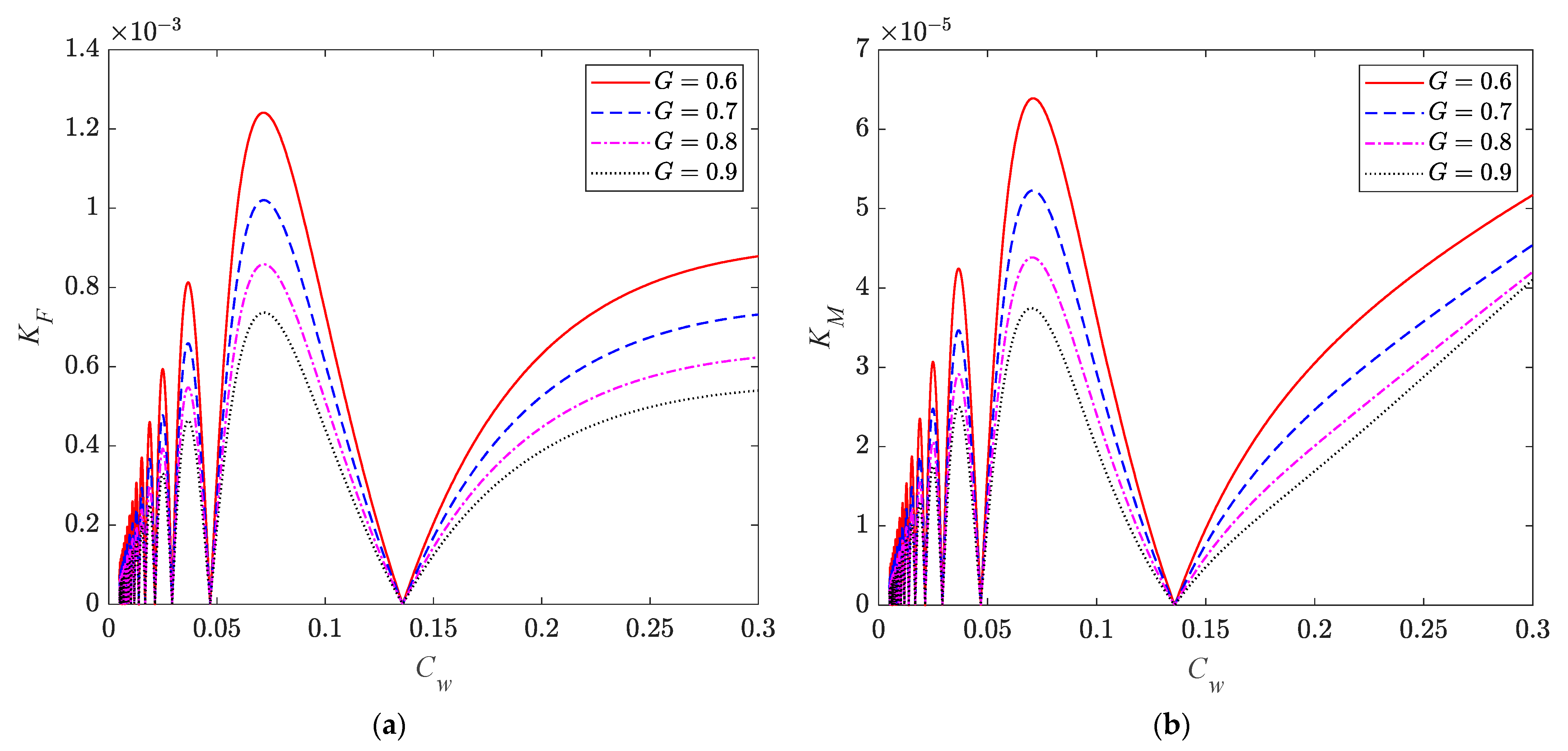
- The net chamber will be subjected to critical wave responses at particular frequencies, but some specific ratios of the cage diameter to the wavelength might cause the vanishing of the wave force and the overturning moment on the cage.
- (4)
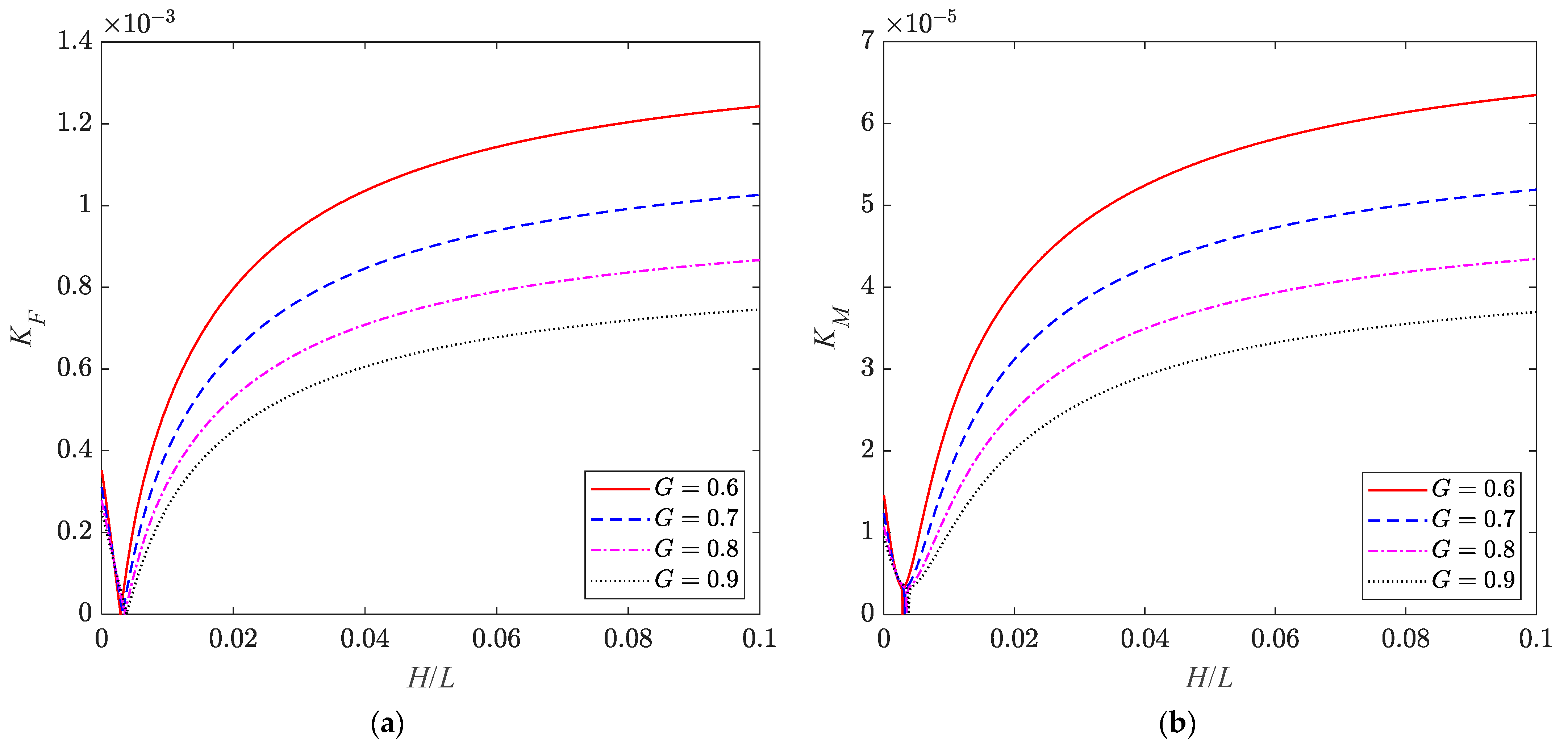
- Appropriately increasing the porosity and reducing the axial tension of the net chamber are beneficial in reducing the wave load.
- (5)
- The porous effect of the fish net is significantly impacted by the axial tension in the cage.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. The State of World Fisheries and Aquaculture 2020; Food and Agriculture Organization of the United Nations: Rome, Italy, 2020. [Google Scholar]
- Zhou, X. Brief Overview of World Aquaculture Production: An Update with Latest Available 2017 Global Production Data. FAO Aquac. Newslett. 2019, 60, 6–8. [Google Scholar]
- Chen, D.; Wang, C.; Zhang, H. Examination of net volume reduction of gravity-type open-net fish cages under sea currents. Aquac. Eng. 2021, 92, 102128. [Google Scholar] [CrossRef]
- Tsukrov, I.; Eroshkin, O.; Fredriksson, D.; Swift, M.; Celikkol, B. Finite element modeling of net panels using a consistent net element. Ocean Eng. 2003, 30, 251–270. [Google Scholar] [CrossRef]
- Zhan, J.; Jia, X.; Li, Y.; Sun, M.; Guo, G.; Hu, Y. Analytical and experimental investigation of drag on nets of fish cages. Aquac. Eng. 2006, 35, 91–101. [Google Scholar] [CrossRef]
- Li, Y.-C.; Zhao, Y.-P.; Gui, F.-K.; Teng, B. Numerical simulation of the hydrodynamic behaviour of submerged plane nets in current. Ocean Eng. 2006, 33, 2352–2368. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Li, Y.-C.; Dong, G.; Gui, F.-K.; Wu, H. An experimental and numerical study of hydrodynamic characteristics of submerged flexible plane nets in waves. Aquac. Eng. 2008, 38, 16–25. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Modelling of current loads on aquaculture net cages. J. Fluids Struct. 2012, 34, 218–235. [Google Scholar] [CrossRef]
- Bi, C.-W.; Zhao, Y.-P.; Dong, G.-H.; Xu, T.-J.; Gui, F.-K. Numerical simulation of the interaction between flow and flexible nets. J. Fluids Struct. 2014, 45, 180–201. [Google Scholar] [CrossRef]
- Martin, T.; Tsarau, A.; Bihs, H. A numerical framework for modelling the dynamics of open ocean aquaculture structures in viscous fluids. Appl. Ocean Res. 2021, 106, 102410. [Google Scholar] [CrossRef]
- Chwang, A.T. A porous-wavemaker theory. J. Fluid Mech. 1983, 132, 395–406. [Google Scholar] [CrossRef]
- Yu, X.; Chwang, A.T. Wave-Induced Oscillation in Harbor with Porous Breakwaters. J. Waterw. Port Coast. Ocean Eng. 1994, 120, 125–144. [Google Scholar] [CrossRef]
- Lee, M.M.; Chwang, A.T. Scattering and radiation of water waves by permeable barriers. Phys. Fluids 2000, 12, 54–65. [Google Scholar] [CrossRef] [Green Version]
- Sankarbabu, K.; Sannasiraj, S.; Sundar, V. Interaction of regular waves with a group of dual porous circular cylinders. Appl. Ocean Res. 2007, 29, 180–190. [Google Scholar] [CrossRef]
- Park, M.-S.; Koo, W.-C.; Choi, Y.-R. Hydrodynamic interaction with an array of porous circular cylinders. Int. J. Nav. Arch. Ocean Eng. 2010, 2, 146–154. [Google Scholar] [CrossRef] [Green Version]
- Abul-Azm, A.; Williams, A. Interference effects between flexible cylinders in waves. Ocean Eng. 1987, 14, 19–38. [Google Scholar] [CrossRef]
- Yip, T.; Sahoo, T.; Chwang, A.T. Trapping of surface waves by porous and flexible structures. Wave Motion 2002, 35, 41–54. [Google Scholar] [CrossRef]
- Behera, H.; Sahoo, T. Hydroelastic analysis of gravity wave interaction with submerged horizontal flexible porous plate. J. Fluids Struct. 2015, 54, 643–660. [Google Scholar] [CrossRef]
- Mandal, S.; Datta, N.; Sahoo, T. Hydroelastic analysis of surface wave interaction with concentric porous and flexible cylinder systems. J. Fluids Struct. 2013, 42, 437–455. [Google Scholar] [CrossRef]
- Su, W.; Zhan, J.-M.; Huang, H. Analysis of a porous and flexible cylinder in waves. China Ocean Eng. 2015, 29, 357–368. [Google Scholar] [CrossRef]
- Mandal, S.; Sahoo, T. Gravity wave interaction with a flexible circular cage system. Appl. Ocean Res. 2016, 58, 37–48. [Google Scholar] [CrossRef]
- Selvan, S.A.; Gayathri, R.; Behera, H.; Meylan, M.H. Surface wave scattering by multiple flexible fishing cage system. Phys. Fluids 2021, 33, 037119. [Google Scholar] [CrossRef]
- Guo, Y.; Mohapatra, S.; Soares, C.G. Review of developments in porous membranes and net-type structures for breakwaters and fish cages. Ocean Eng. 2020, 200, 107027. [Google Scholar] [CrossRef]
- Li, M.; Zhang, H.; Guan, H.; Lin, G. Three-dimensional investigation of wave–pile group interaction using the scaled boundary finite element method. Part I: Theoretical developments. Ocean Eng. 2013, 64, 174–184. [Google Scholar] [CrossRef] [Green Version]
- Ito, S.; Kinoshia, T.; Bao, W. Hydrodynamic behaviors of an elastic net structure. Ocean Eng. 2014, 92, 188–197. [Google Scholar] [CrossRef]
- Liu, H.-F.; Bi, C.-W.; Zhao, Y.-P. Experimental and numerical study of the hydrodynamic characteristics of a semisubmersible aquaculture facility in waves. Ocean Eng. 2020, 214, 107714. [Google Scholar] [CrossRef]
- Sommerfeld, A. Partial Differential Equations in Physics; Elsevier Science & Technology: Burlington, MA, USA, 1949. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Mohapatra, S.; Soares, C. Finite Element Analysis of the Effect of Currents on the Dynamics of a Moored Flexible Cylindrical Net Cage. J. Mar. Sci. Eng. 2021, 9, 159. [Google Scholar] [CrossRef]
- Zhao, F.; Bao, W.; Kinoshita, T.; Itakura, H. Theoretical and Experimental Study on a Porous Cylinder Floating in Waves. J. Offshore Mech. Arct. Eng. 2010, 133, 011301. [Google Scholar] [CrossRef]
- Park, M.-S.; Koo, W. Mathematical Modeling of Partial-Porous Circular Cylinders with Water Waves. Math. Probl. Eng. 2015, 2015, 903748. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | T (s) | G | α | γ | d1 (m) |
|---|---|---|---|---|---|
| A1 | 4 | 0.7 | 20 | 1 | 0 |
| A2 | 6 | 0.7 | 20 | 1 | 0 |
| A3 | 8 | 0.7 | 20 | 1 | 0 |
| A4 | 10 | 0.7 | 20 | 1 | 0 |
| B1 | 8 | 0.1 | 20 | 1 | 0 |
| B2 | 8 | 0.2 | 20 | 1 | 0 |
| B3 | 8 | 0.3 | 20 | 1 | 0 |
| B4 | 8 | 0.4 | 20 | 1 | 0 |
| B5 | 8 | 0.6 | 20 | 1 | 0 |
| B6 | 8 | 0.7 | 20 | 1 | 0 |
| B7 | 8 | 0.8 | 20 | 1 | 0 |
| B8 | 8 | 0.9 | 20 | 1 | 0 |
| C1 | 8 | 0.7 | 1 | 1 | 0 |
| C2 | 8 | 0.7 | 10 | 1 | 0 |
| C3 | 8 | 0.7 | 20 | 1 | 0 |
| C4 | 8 | 0.7 | Fixed end | 1 | 0 |
| D1 | 8 | 0.7 | 20 | 0.5 | 0 |
| D2 | 8 | 0.7 | 20 | 1 | 0 |
| D3 | 8 | 0.7 | 20 | 2 | 0 |
| D4 | 8 | 0.7 | 20 | 4 | 0 |
| E1 | 8 | 0.7 | 20 | 1 | 0 |
| E2 | 8 | 0.7 | 20 | 1 | 10 |
| E3 | 8 | 0.7 | 20 | 1 | 30 |
| E4 | 8 | 0.7 | 20 | 1 | 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, M.; Zhang, H.; Jeng, D.-S.; Wang, C.M. A Semi-Analytical Model for Studying Hydroelastic Behaviour of a Cylindrical Net Cage under Wave Action. J. Mar. Sci. Eng. 2021, 9, 1445. https://doi.org/10.3390/jmse9121445
Ma M, Zhang H, Jeng D-S, Wang CM. A Semi-Analytical Model for Studying Hydroelastic Behaviour of a Cylindrical Net Cage under Wave Action. Journal of Marine Science and Engineering. 2021; 9(12):1445. https://doi.org/10.3390/jmse9121445
Chicago/Turabian StyleMa, Mingyuan, Hong Zhang, Dong-Sheng Jeng, and Chien Ming Wang. 2021. "A Semi-Analytical Model for Studying Hydroelastic Behaviour of a Cylindrical Net Cage under Wave Action" Journal of Marine Science and Engineering 9, no. 12: 1445. https://doi.org/10.3390/jmse9121445