Application of the SOSim v2 Model to Spills of Sunken Oil in Rivers


Abstract
:1. Introduction
2. Methods
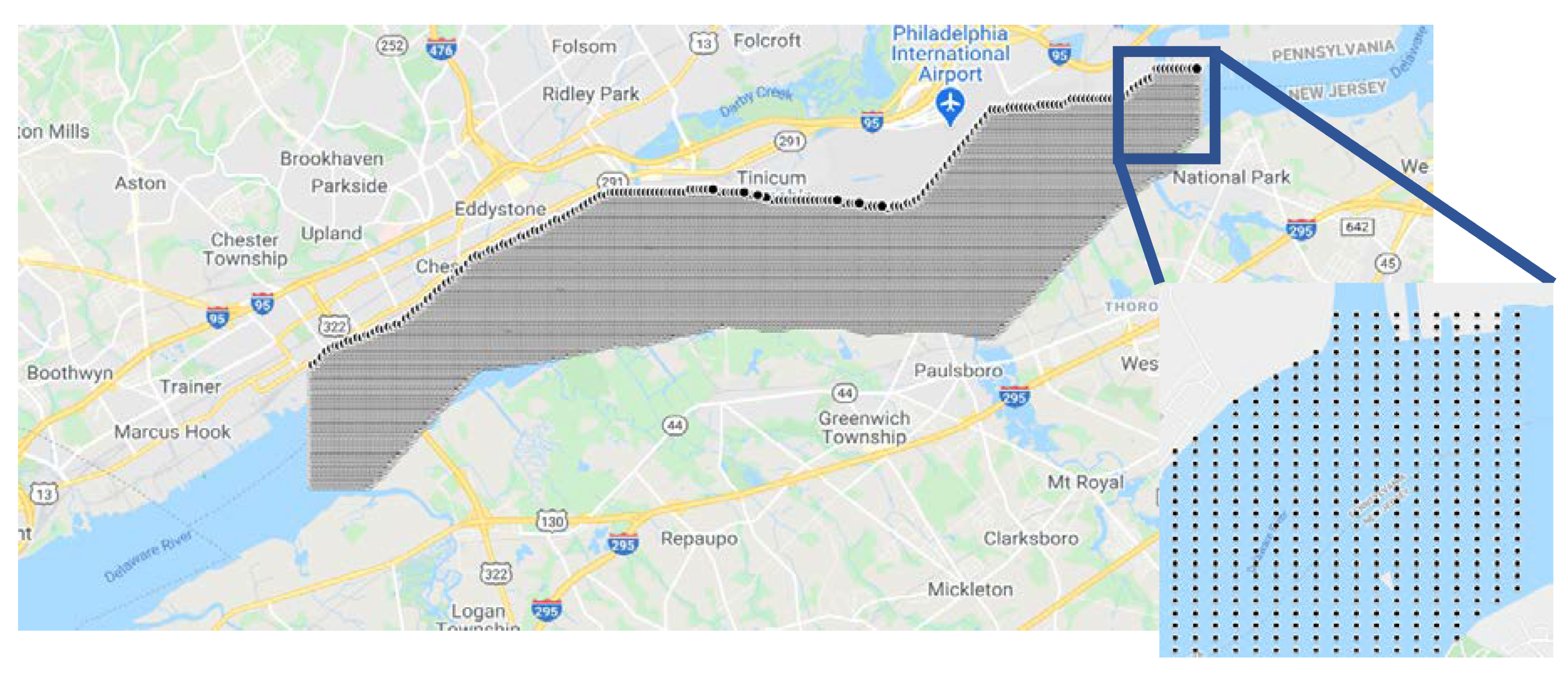
2.1. Definition of the Sampling Grid
2.2. Uncertain Parameter Ranges
2.3. Accounting for Flow along Streamlines
2.4. Development of a 1-D Model
3. Model Demonstration
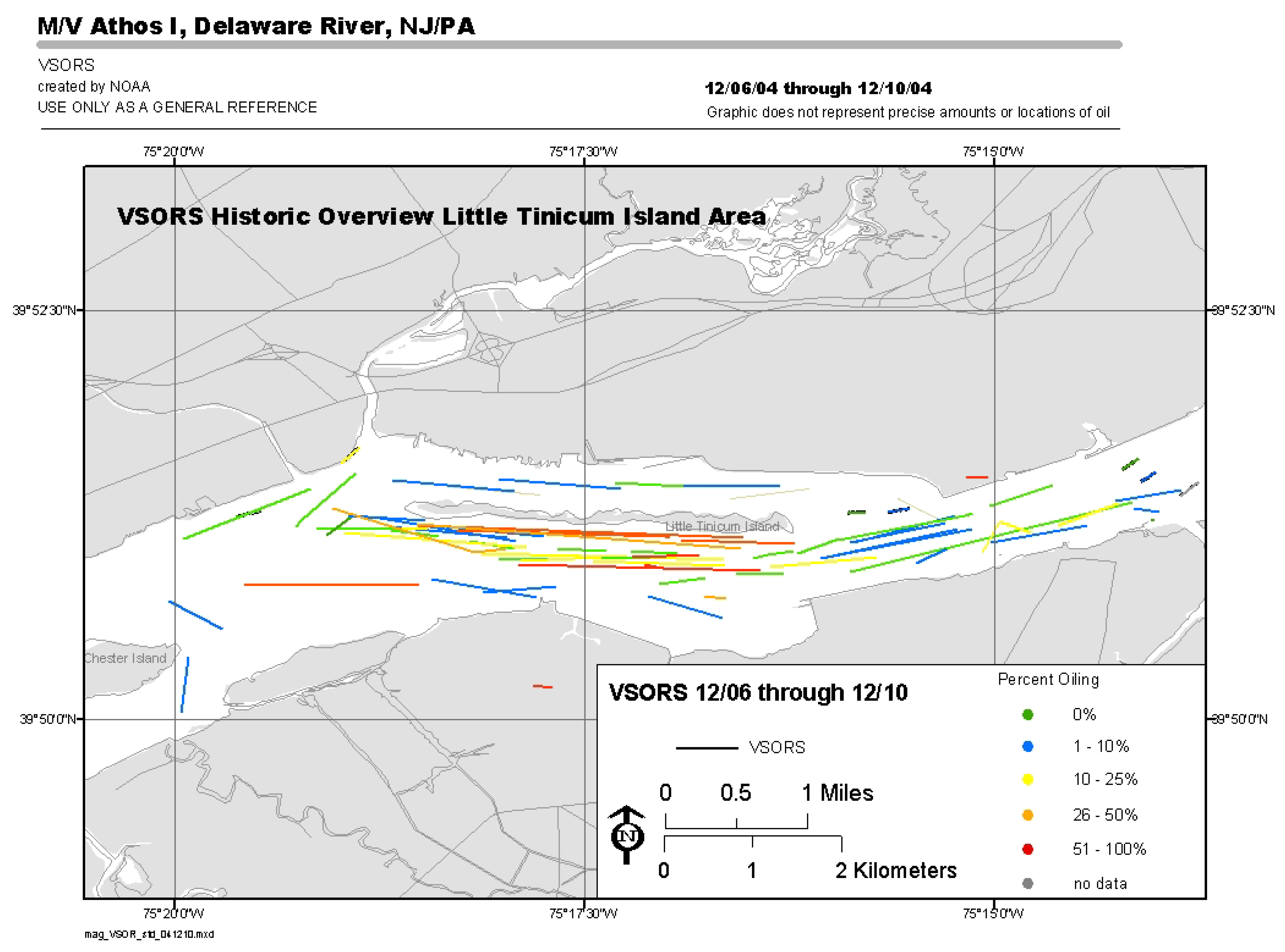
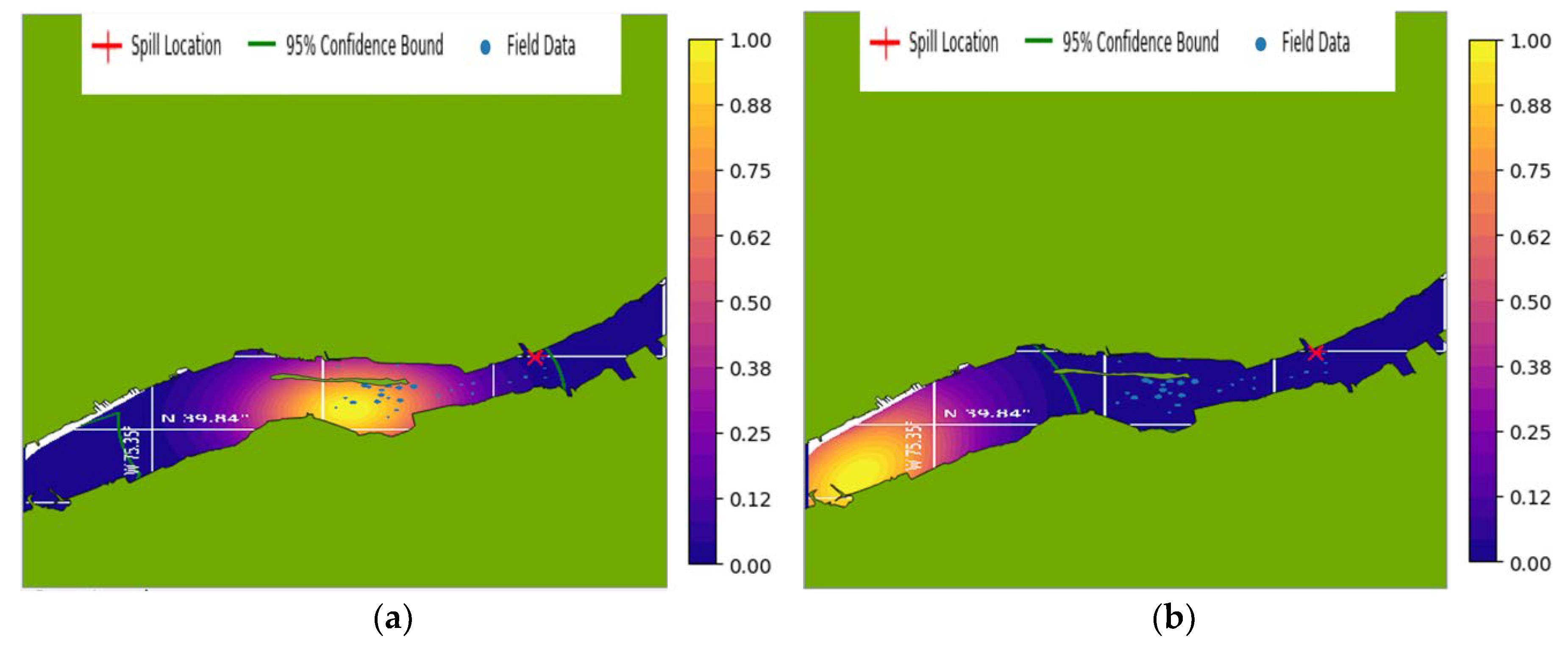
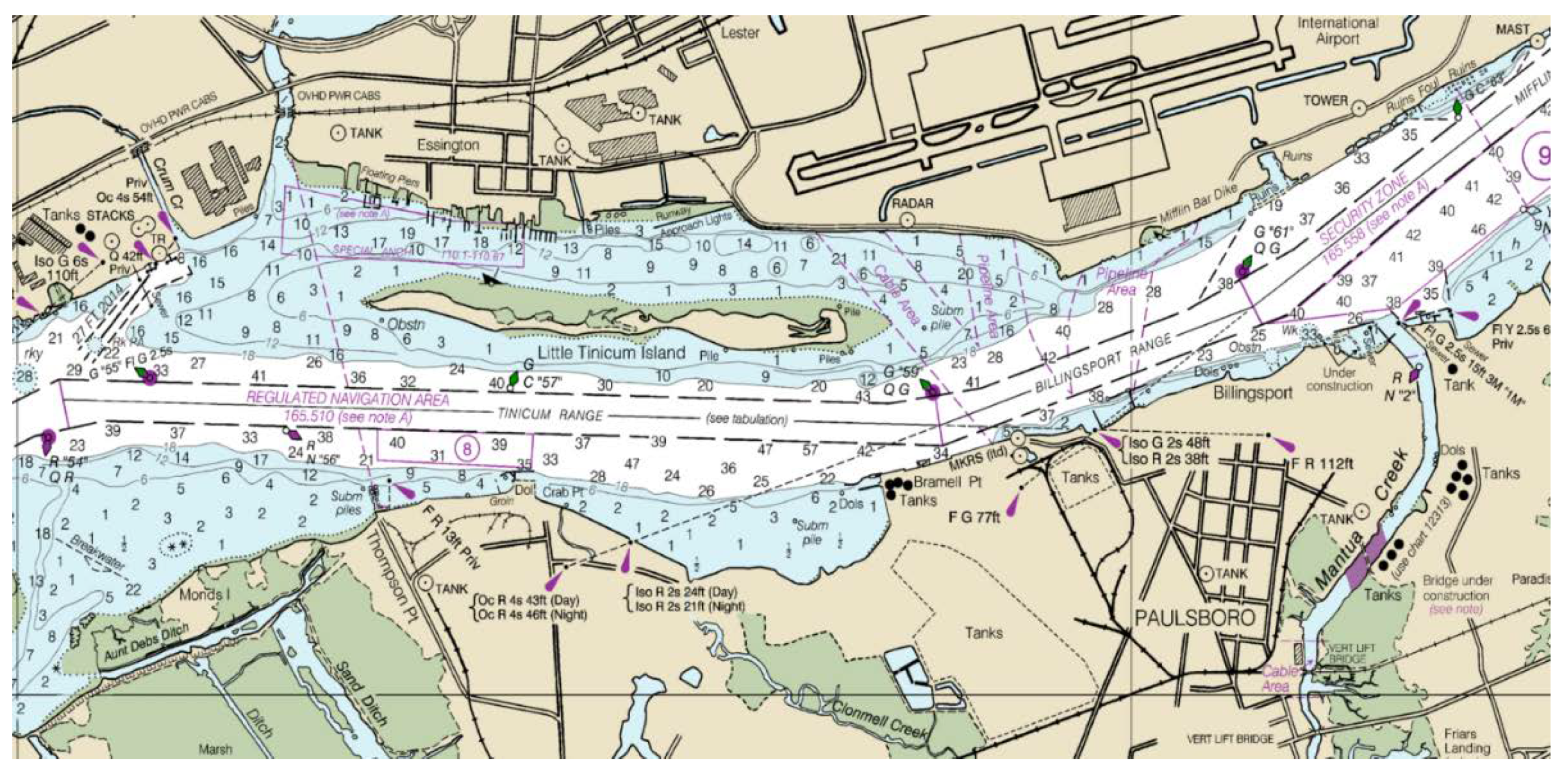
3.1. M/T Athos I Oil Spill
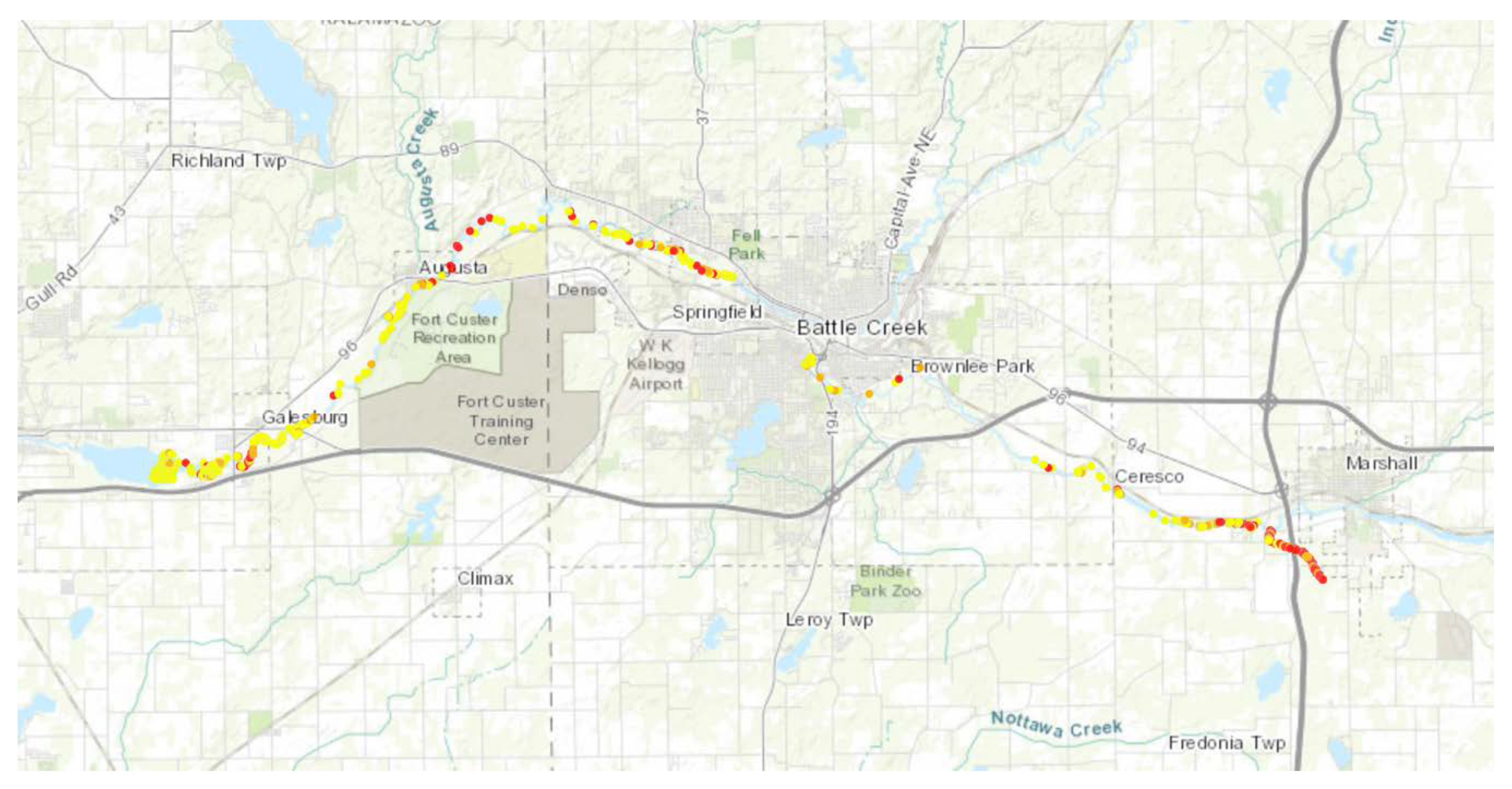
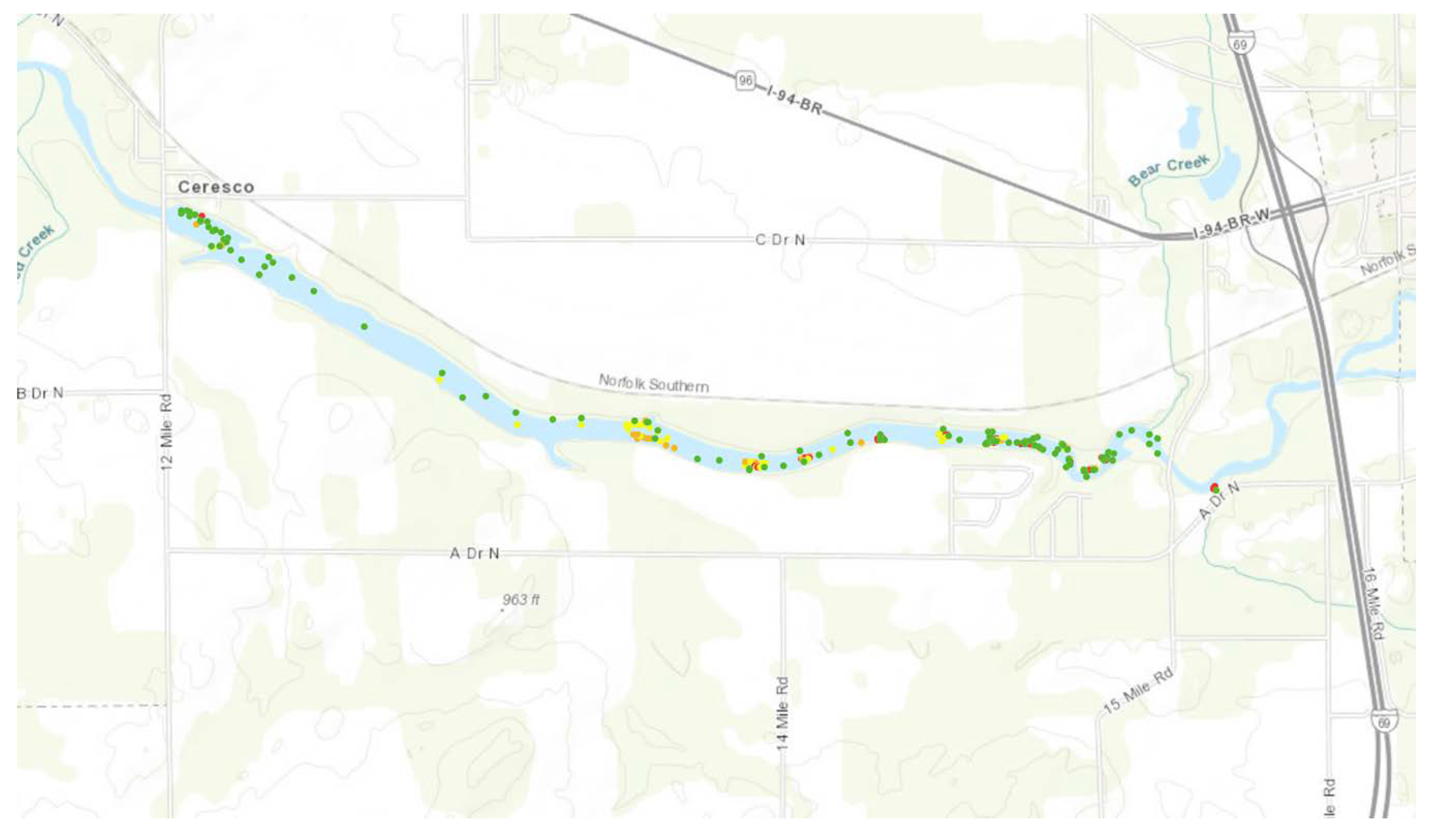
3.2. Enbridge Kalamazoo River Oil Spill
4. Discussion and Conclusions
- Inference based on available field data, and constraints on gravitational deposition, can be an effective approach to forecasting the trajectory of relatively slow-moving pollutant masses, particularly when reliable flow field data are not available;
- even qualitative data on pollutant concentration, such as poling data, are sufficiently informative inputs to an inferential assessment such as implemented in SOSim v2;
- SOSim v2 is applicable for locating and tracking sunken oil in navigable rivers following releases, as long as field observations on sunken oil concentrations and bathymetric data are available; and
- as an open source application, SOSim v2 can be modified to operate in 1-D for non-navigable rivers, at such time as bathymetric data become more widely available, e.g., for definition of river boundaries.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- NOAA; API. Options for Minimizing Environmental Impacts of Freshwater Spill Response; Inland Oil Spills; API Publishing Services: Washington DC, USA, 1994. [Google Scholar]
- Yapa, P.D.; Tao Shen, H. Modelling river oil spills: A review: Modélisation de déversements de pétrole en rivière: Étatde l’art. J. Hydraul. Res. 1994, 32, 765–782. [Google Scholar] [CrossRef]
- Hansen, M.E.; Dursteler, E. Pipelines, Rail & Trucks—Cost Benefit Analysis; Strata, 2017; Available online: https://www.strata.org/pdf/2017/pipelines.pdf (accessed on 25 May 2020).
- National Acadamies of Sciences Engineering Medicine. Spills of Diluted Bitumen from Pipelines: A Comparative Study of Environmental Fate, Effects, and Response; National Acadamies Press: Washington, DC, USA, 2016; ISBN 0309380103. [Google Scholar]
- Santos, R.G.; Loh, W.; Bannwart, A.C.; Trevisan, O.V. An overview of heavy oil properties and its recovery and transportation methods. Braz. J. Chem. Eng. 2014, 31, 571–590. [Google Scholar] [CrossRef] [Green Version]
- NOAA. Oil Spills in Rivers. Available online: https://response.restoration.noaa.gov/oil-and-chemical-spills/oil-spills/resources/oil-spills-rivers.html (accessed on 25 May 2020).
- Fitzpatrick, F.A.; Johnson, R.; Zhu, Z.; Waterman, D.; McCulloch, R.D.; Hayter, E.J.; Garcia, M.H.; Boufadel, M.; Dekker, T.; Soong, D.T.; et al. Integrated Modeling Approach for Fate and Transport of Submerged Oil and Oil-Particle Aggregates in a Freshwater Riverine Environment. In Proceedings of the Joint Federal Interagency Conference, Reno, NV, USA, 19–23 April 2015; pp. 1–12. [Google Scholar]
- Harper, J.R.; Sergy, G.; Britton, L. uSCAT Technical Reference Manual: Underwater Seabed Cleanup Assessment Technique for Sunken Oil; Coastal and Ocean Resources: Victoria, BC, Canada, 2018. [Google Scholar]
- API. Sunken Oil Detection and Recovery; API Publishing Services: Washington, DC, USA, 2016. [Google Scholar]
- Michel, J.; Hansen, K.A. Chapter 13. Sunken and Submerged Oil. In Oil Spill Science and Technology; Gulf Professional Publishing: Houston, TX, USA, 2017; pp. 731–757. ISBN 9780128094136. [Google Scholar]
- Sawyer, M.; Schweitzer, G.; Davis, A.; Elliott, J.; Mauseth, G.; Scott, T.M. T/B APEX 3508: Best Practices for Detection and Recovery of Sunken Oil. In Proceedings of the International Oil Spill Conference, Long Beach, CA, USA, 15–18 May 2017; pp. 134–155. [Google Scholar]
- Heiland, R.C.; Smith, B.L.; Hazel, W.E.; Popa, M.; McCarthy, D.J. Underwater recovery of submerged oil during a cold weather response. In Proceedings of the International Oil Spill Conference, Washington, DC, USA, 7–10 April 1997; pp. 765–772. [Google Scholar]
- Dollhopf, R.; Durno, M. Kalamazoo River\Enbridge Pipeline Spill 2010. In Proceedings of the International Oil Spill Conference, Washington, DC, USA, 23–26 May 2011; p. 422. [Google Scholar]
- IPIECA. Oil Spills: Inland Response; IOGP Report 514; IPIECA-IOGP: London, UK, 2015. [Google Scholar]
- NRC. Chapter: 4 Transport and Fate. In Oil Spill Dispersants: Efficacy and Effects; National Academies Press: Washington, DC, USA, 2005; ISBN 030909562X. [Google Scholar]
- Horn, M.; French McCay, D. Consequence Analysis for Crude-by-Rail Releases into Freshwater Environments. In Proceedings of the 39th AMOP Technical Seminar on Environmental Contaminant and Response, Environment Canada, Ottawa, ON, Canada, 7–9 June 2016; pp. 1–28. [Google Scholar]
- French McCay, D.P.; Rowe, J.; Crowley, D.; Ducharme, J.; Frediani, M.; Bernardo, M.; Etkin, D.S. Potential Oil Trajectories and Oil Exposure from Hypothetical Spills in the Hudson River. In Proceedings of the 41st AMOP Technical Seminar, Environment and Climate Change Canada, Ottawa, ON, Canada, 2–4 October 2018; pp. 1163–1193. [Google Scholar]
- NOAA. When the Dynamics of an Oil Spill Shut Down a Nuclear Power Plant. Available online: https://response.restoration.noaa.gov/about/media/when-dynamics-oil-spill-shut-down-nuclear-power-plant.html (accessed on 19 August 2020).
- Zhu, Z.; Waterman, D.M.; Garcia, M.H. Modeling the transport of oil–particle aggregates resulting from an oil spill in a freshwater environment. Environ. Fluid Mech. 2018, 18, 967–984. [Google Scholar] [CrossRef]
- Jones, L.; Garcia, M.H. Development of a Rapid Response Riverine Oil-Particle Aggregate Formation, Transport, and Fate Model. J. Environ. Eng. 2018, 144, 1–16. [Google Scholar] [CrossRef]
- Echavarria-Gregory, M.A.; Englehardt, J.D. A predictive Bayesian data-derived multi-modal Gaussian model ofsunken oil mass. Environ. Model. Softw. 2015, 69, 1–13. [Google Scholar] [CrossRef]
- Jacketti, M.; Ji, C.; Englehardt, J.D.; Beegle-Krause, C.J. Development of the SOSim Model for Inferential Tracking of Subsurface Oil. In Proceedings of the 42nd (AMOP) Technical Seminar, Environment and Climate Change Canada, Ottowa, ON, Canada, 4–6 June 2019; pp. 485–501. [Google Scholar]
- Jacketti, M.; Englehardt, J.D.; Beegle-Krause, C.J. Bayesian Sunken Oil Tracking with SOSim v2: Inference from Field and Bathymetric Data. Mar. Pollut. Bull. 2020. under review. [Google Scholar]
- Broomé, S.; Nilsson, J. Stationary sea surface height anomalies in cyclonic boundary currents: Conservation of potential vorticity and deviations from strict topographic steering. J. Phys. Oceanogr. 2016, 46, 2437–2456. [Google Scholar] [CrossRef]
- Chin, D.A. Chapter 4: Rivers and Streams. In Water-Quality Engineering in Natural Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; pp. 78–134. [Google Scholar]
- Beegle-Krause, C.J.; Barker, C.H.; Watabayashi, G.; Lehr, W. Long-Term Transport of Oil from T/B DBL-152: Lessons Learned for Oils Heavier than Seawater. In Proceedings of the Arctic and Marine Oil Pollution Conference 2006, Vancouver, BC, Canada, 6–8 June 2006. [Google Scholar]
- Boehm, P.D.; Barak, J.E.; Fiest, D.L.; Elskus, A.A. A chemical investigation of the transport and fate of petroleum hydrocarbons in littoral and benthic environments: The Tsesis oil spill. Mar. Environ. Res. 1982, 6, 157–188. [Google Scholar] [CrossRef]
- Beegle-Krause, C.J. Challenges and Mysteries in Oil Spill Fate and Transport Modeling. In Oil Spill Environmental Forensics Case Studies; Elsevier: Amsterdam, The Netherlands, 2018; pp. 187–199. [Google Scholar]
- Kindsvater, C.E. Selected Topics of Fluid Mechanics; Geological Survey Water-Supply Paper 1369-A, River Hydraulics; US GPO: Washington, DC, USA, 1958.
- Submerged Oil Assessment Unit. Submerged Oil Assessment—Athos I Oil Spill; NOAA: Washington, DC, USA, 2004.
- US EPA Enbridge Spill Response Timeline. Available online: https://www.epa.gov/enbridge-spill-michigan/enbridge-spill-response-timeline (accessed on 27 August 2020).
- Michigan Department of Community Health. Kalamazoo River/Enbridge Spill: Evaluation of People’s Risk for Health Effects from Contact with the Submerged Oil in the Sediment of the Kalamazoo River; U.S. Department of Health and Human Services: Atlanta, GA, USA, 2012.
- Fitzpatrick, F.A.; Boufadel, M.C.; Johnson, R.; Lee, K.W.; Graan, T.P.; Bejarano, A.C.; Zhu, Z.; Waterman, D.; Capone, D.M.; Hayter, E.; et al. Oil-Particle Interactions and Submergence from Crude Oil Spills in Marine and Freshwater Environments: Review of the Science and Future Science Needs; U.S. Geological Survey: Reston, VA, USA, 2015.
- US EPA. FOSC Desk Report for the Enbridge Line 6b Oil Spill in Marshall, Michigan; US EPA: Washington, DC, USA, 2016.
- Hayter, E.; Mcculloch, R.; Redder, T.; Boufadel, M.; Johnson, R.; Fitzpatrick, F. Modeling the Transport of Oil Particle Aggregates and Mixed Sediment in Surface Waters Environmental Laboratory, ERDC Technical Report; US Army Corps of Engineers: Vicksburg, MS, USA, 2015.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Units | Minimum | Maximum |
|---|---|---|---|
| km/d | −67.1 | 67.1 | |
| km/d | −2.4 | 2.4 | |
| km2/d | 0.01 | 0.6 | |
| km2/d | 0.01 | 0.2 | |
| [-] | −0.999 | 0.999 | |
| [-] | 0 | 1 |
| Required Input | Output |
|---|---|
| Spill coordinates and time: 39.86° N, 075.23694° W on 26 November 2004 at 00:00 Field observations: VSORS concentration data Figure 2 (lat/lon, concentration) and Sampling Date (8 December 2004) at 00:00 Desired prediction dates: 8 December 2004 and 20 December 2004 | Maps of relative oil concentration (conditional probability) |
| Optional Input | Optional Output |
| Bathymetry Data Defined Modeling Area: 0.3° lon × 0.1° lat around the spill Interactive spatial scale and resolution: 2000 grid nodes in each direction | Location of VSORS concentration data 95% confidence bounds |
| Parameter | Best Guess Patch | Conf. Bound Patch |
|---|---|---|
| (km/d) | −0.396 | −0.414 |
| (km/d) | −0.136 | −0.136 |
| (km2/d) | 0.152 | 0.152 |
| (km2/d) | 0.0527 | 0.0702 |
| Required Input | Output |
|---|---|
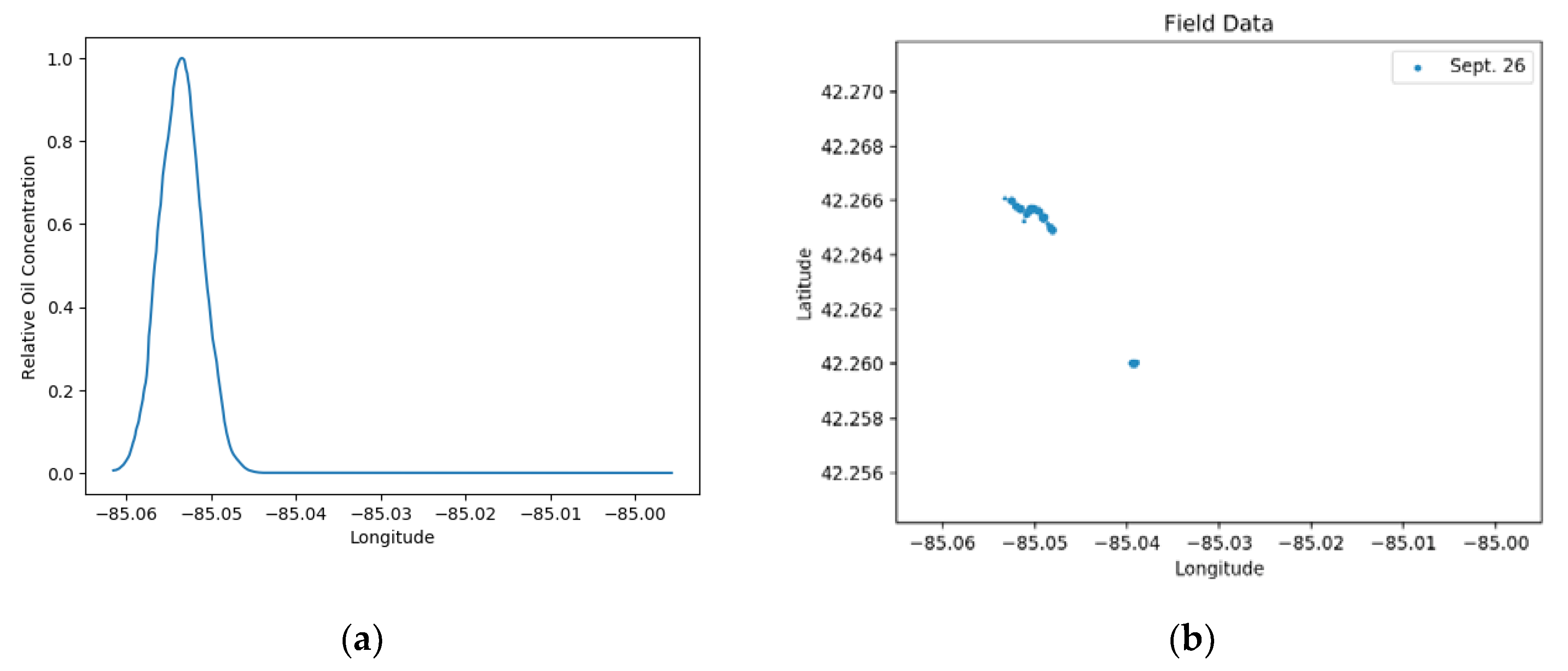
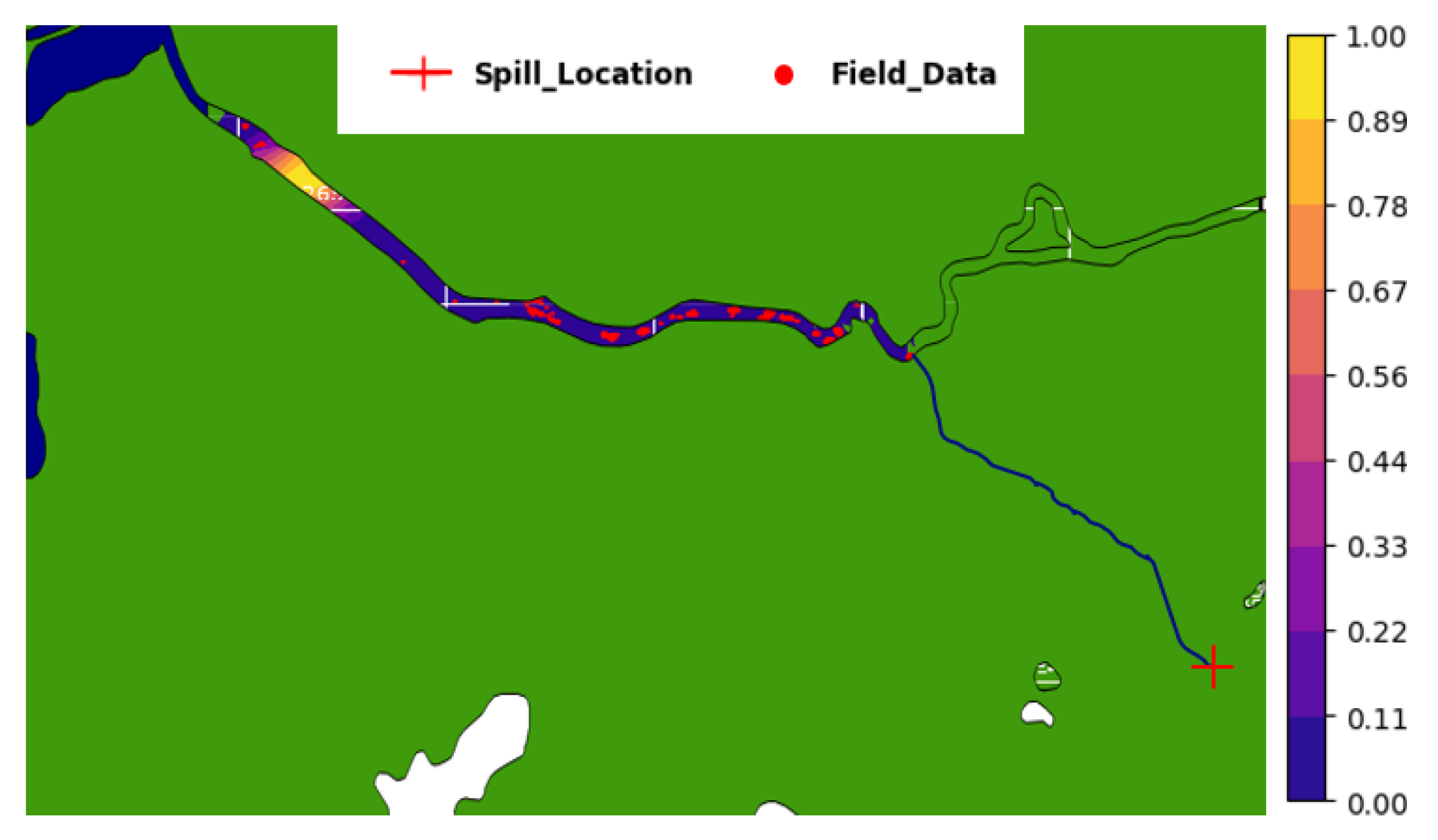
| Spill coordinates and time: 42.2395° N, 084.9662° W on 26 July 2010 at 00:00 Field observations: Poling concentration data Figure 6 (lat/lon, concentration) and Sampling Date (29 August–21 September 2010) at 00:00 Desired prediction date: 26 September 2010 | 1-D probability distribution of sunken oil location in the x-direction Bands of relative oil concentration (conditional probability) |
| Optional Input | Optional Output |
| Bathymetry Data Defined Modeling Area: 0.1° lon around the spill Interactive spatial scale and resolution: 450 grid points | Location of VSORS concentration data |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jacketti, M.; Englehardt, J.D.; Beegle-Krause, C.J. Application of the SOSim v2 Model to Spills of Sunken Oil in Rivers. J. Mar. Sci. Eng. 2020, 8, 729. https://doi.org/10.3390/jmse8090729
Jacketti M, Englehardt JD, Beegle-Krause CJ. Application of the SOSim v2 Model to Spills of Sunken Oil in Rivers. Journal of Marine Science and Engineering. 2020; 8(9):729. https://doi.org/10.3390/jmse8090729
Chicago/Turabian StyleJacketti, Mary, James D. Englehardt, and C.J. Beegle-Krause. 2020. "Application of the SOSim v2 Model to Spills of Sunken Oil in Rivers" Journal of Marine Science and Engineering 8, no. 9: 729. https://doi.org/10.3390/jmse8090729