Three-Dimensional Fluid–Structure Interaction Case Study on Elastic Beam

Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Arrangement and Analysis Methodology
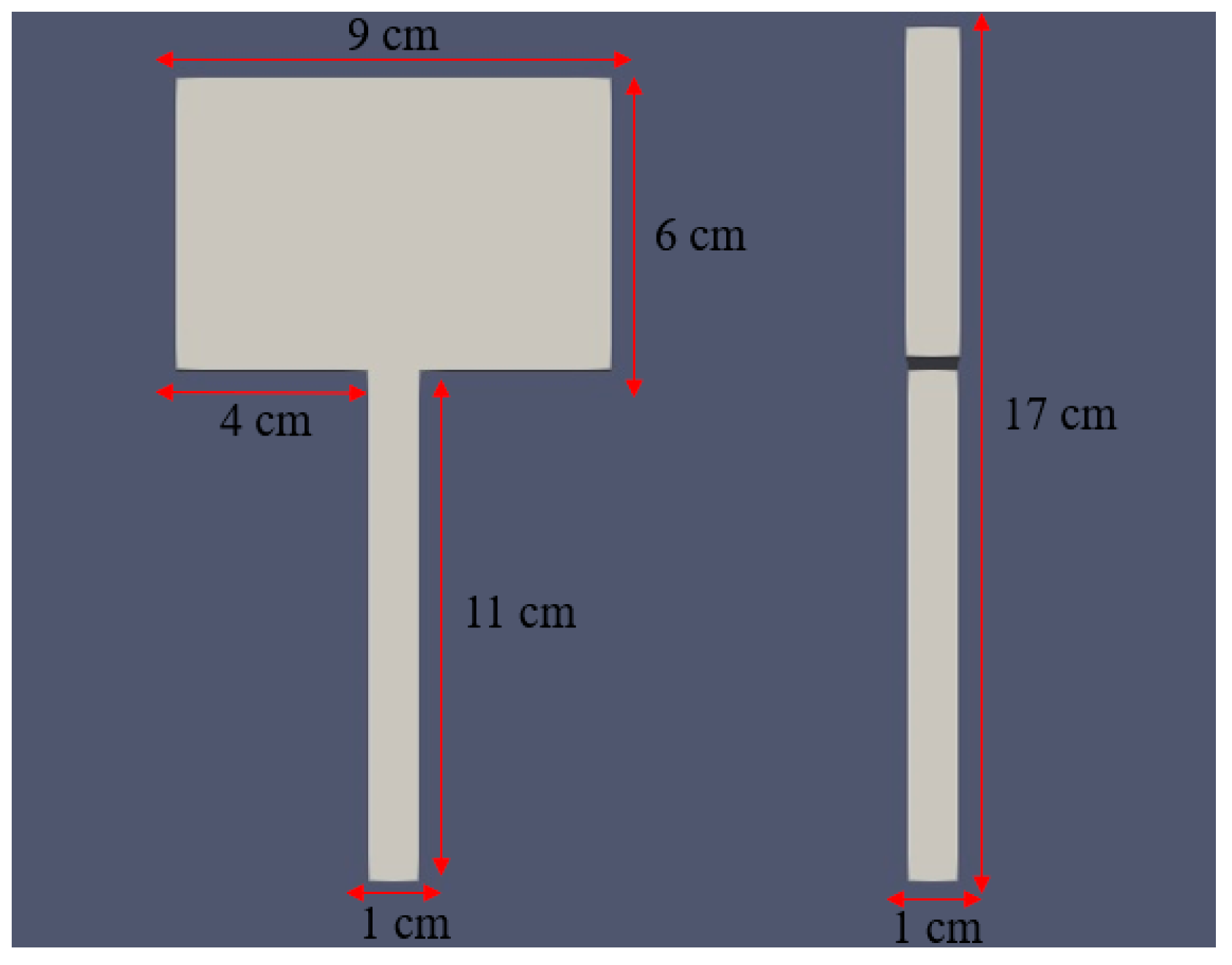
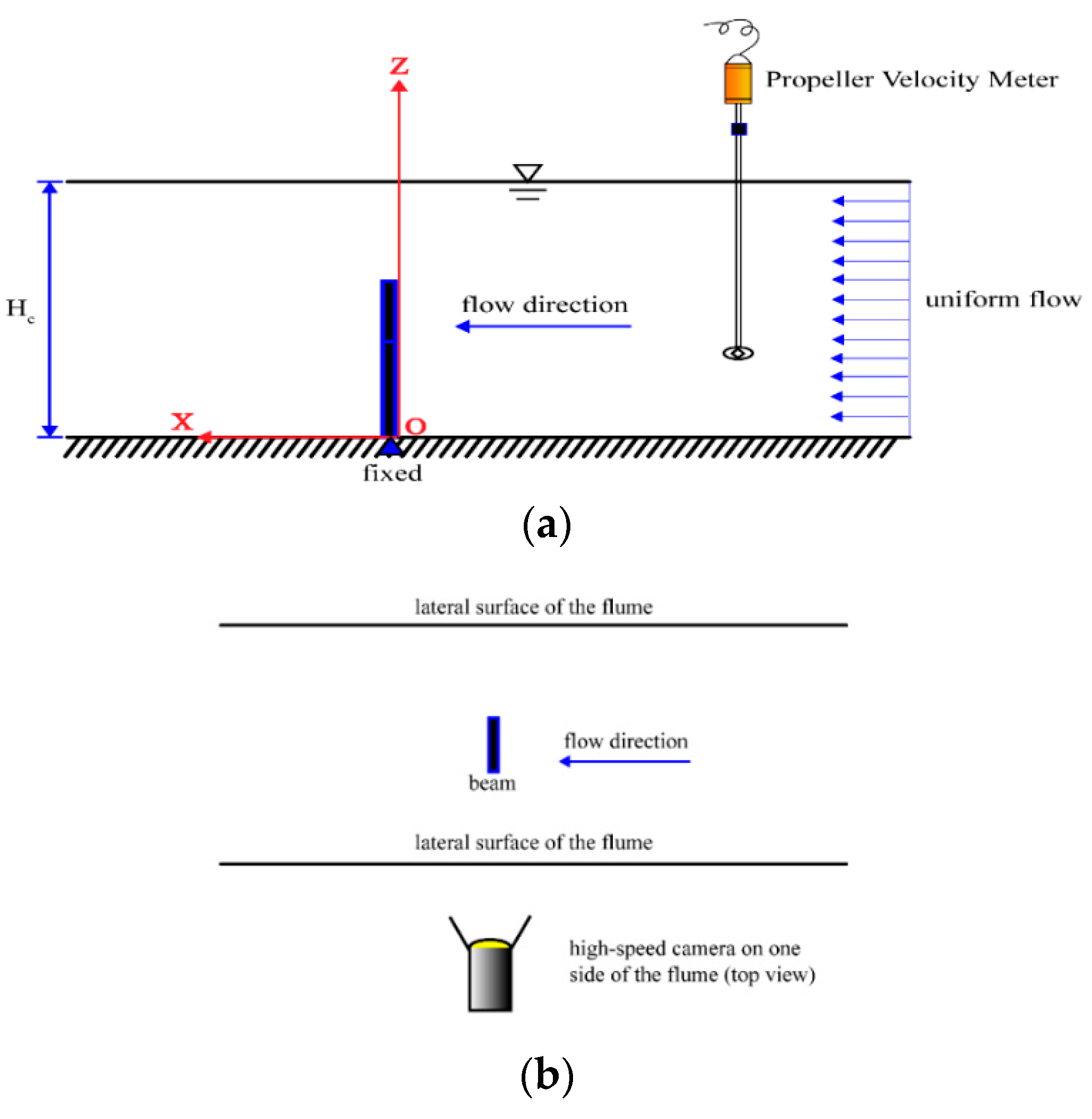
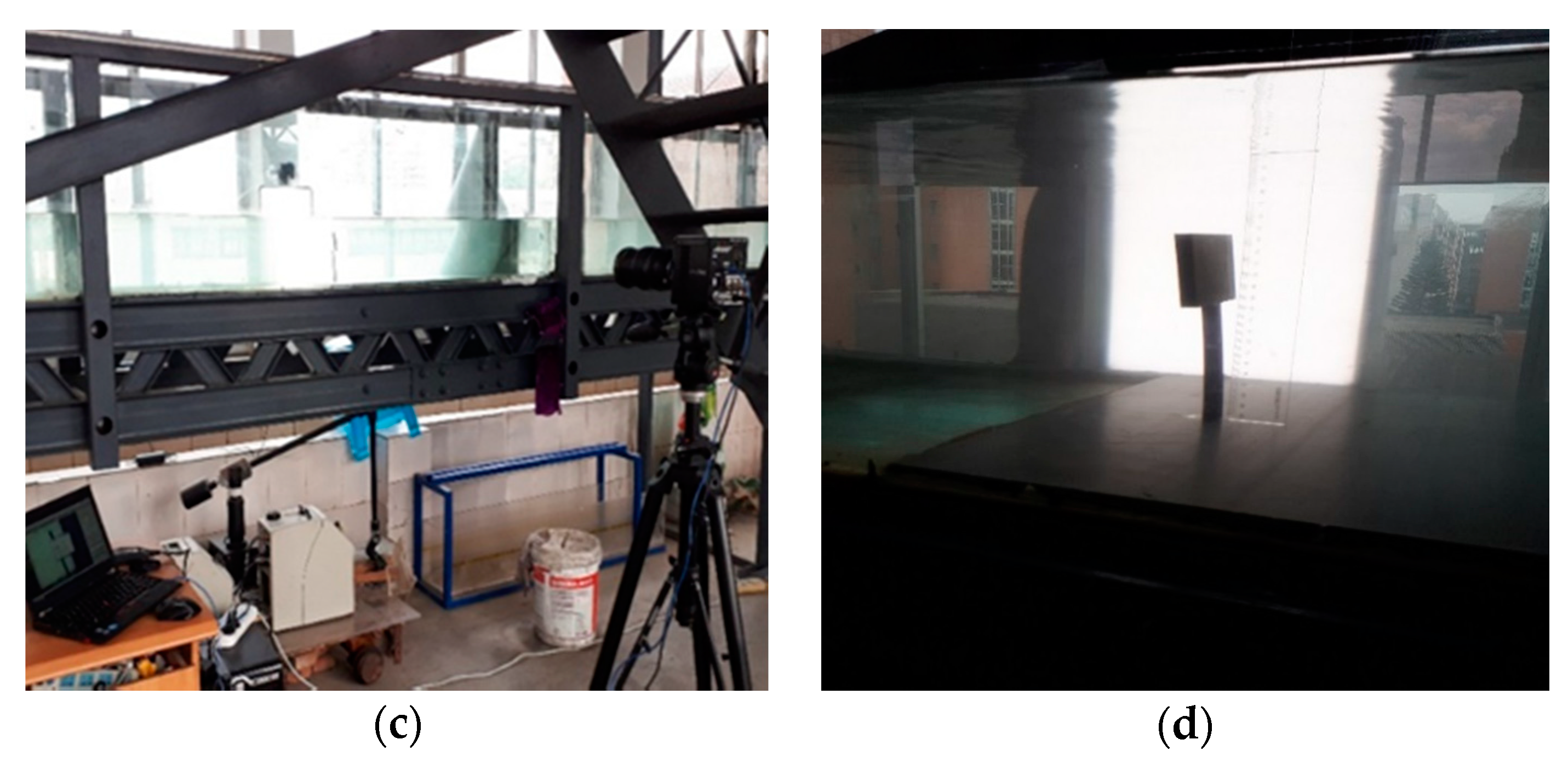
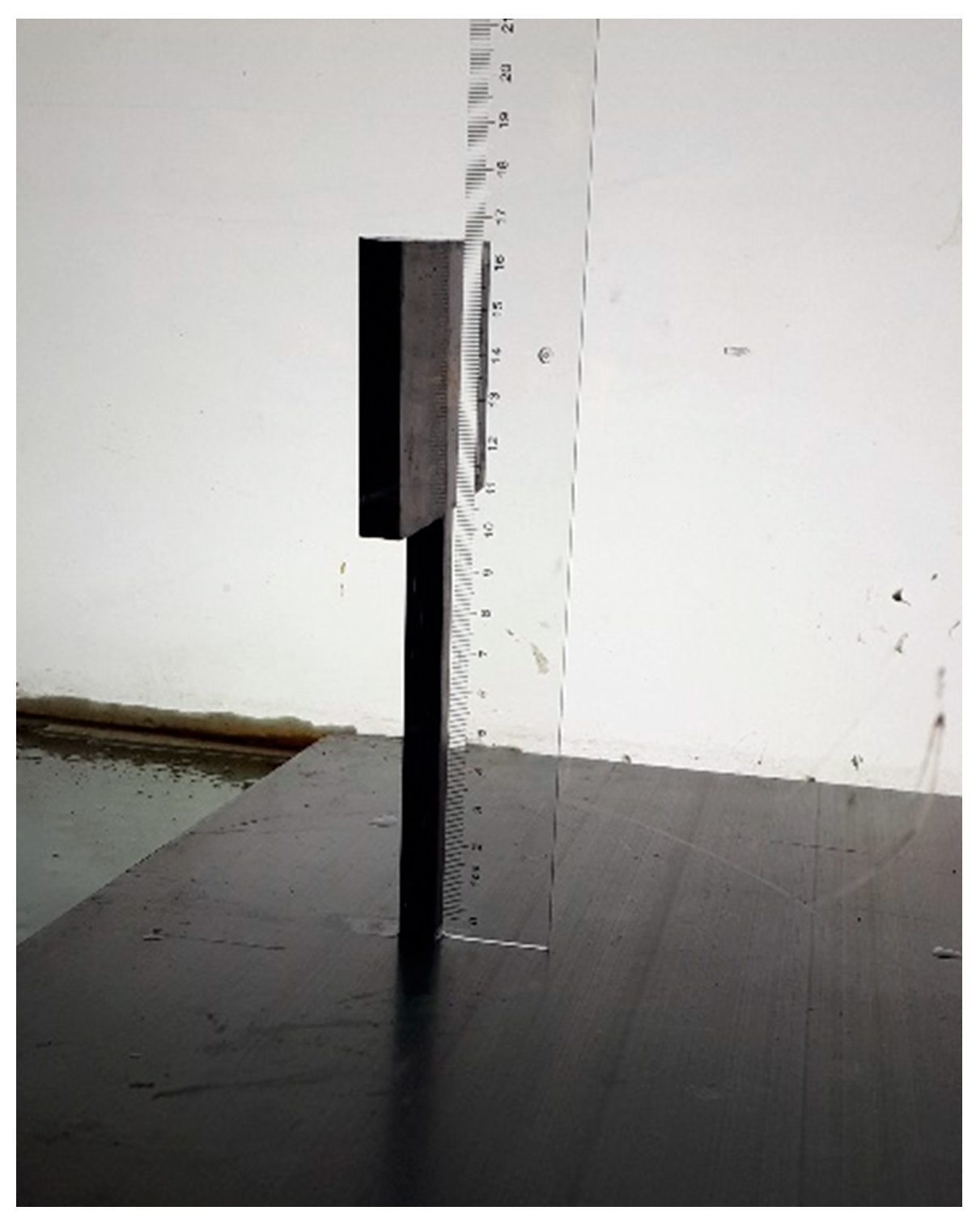
2.2. Experimental Setup
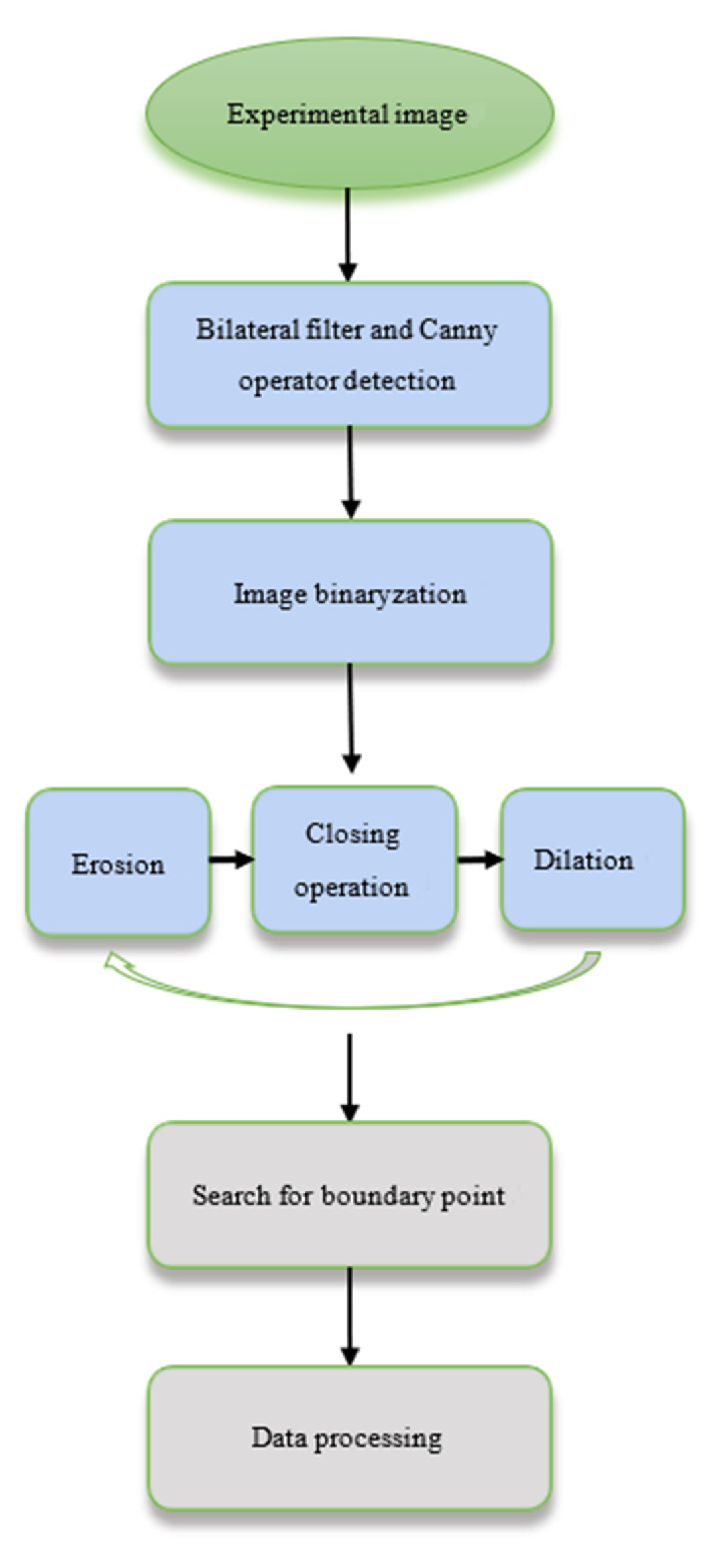
2.3. Data Analysis
2.4. Numerical Methods
2.5. Computational Fluid Dynamics (CFD)
2.6. Computational Structural Dynamics (CSD)
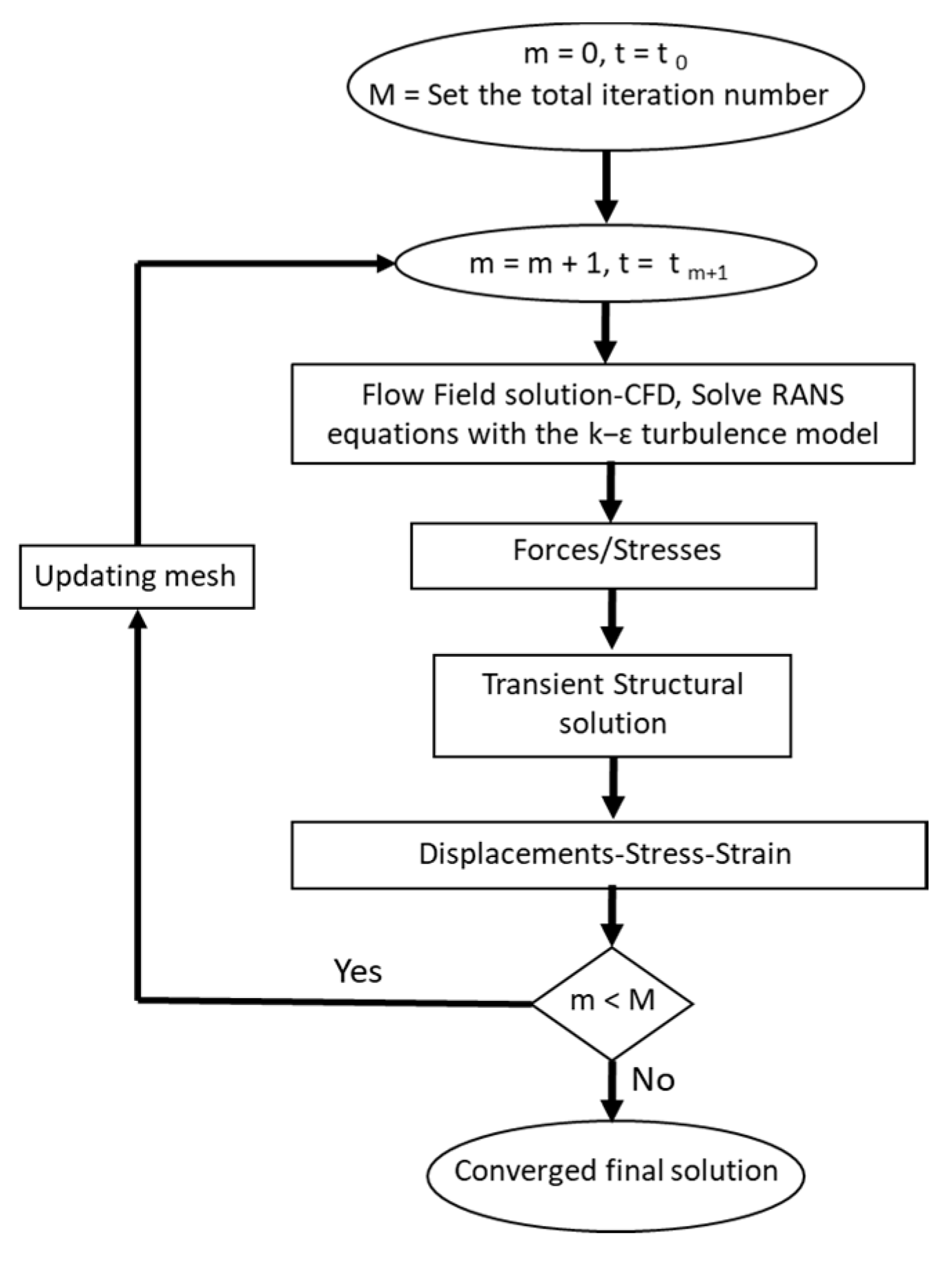
2.7. CFD-CSD Coupling
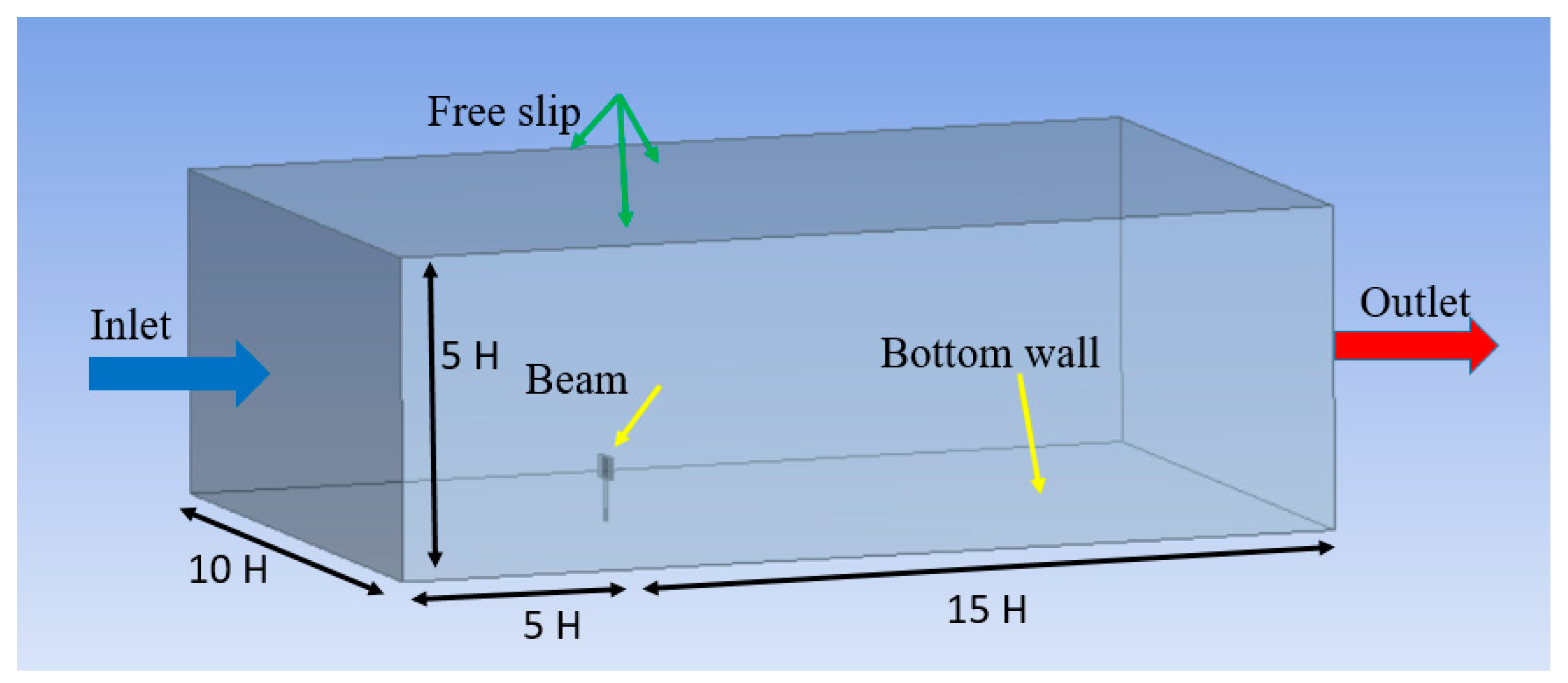
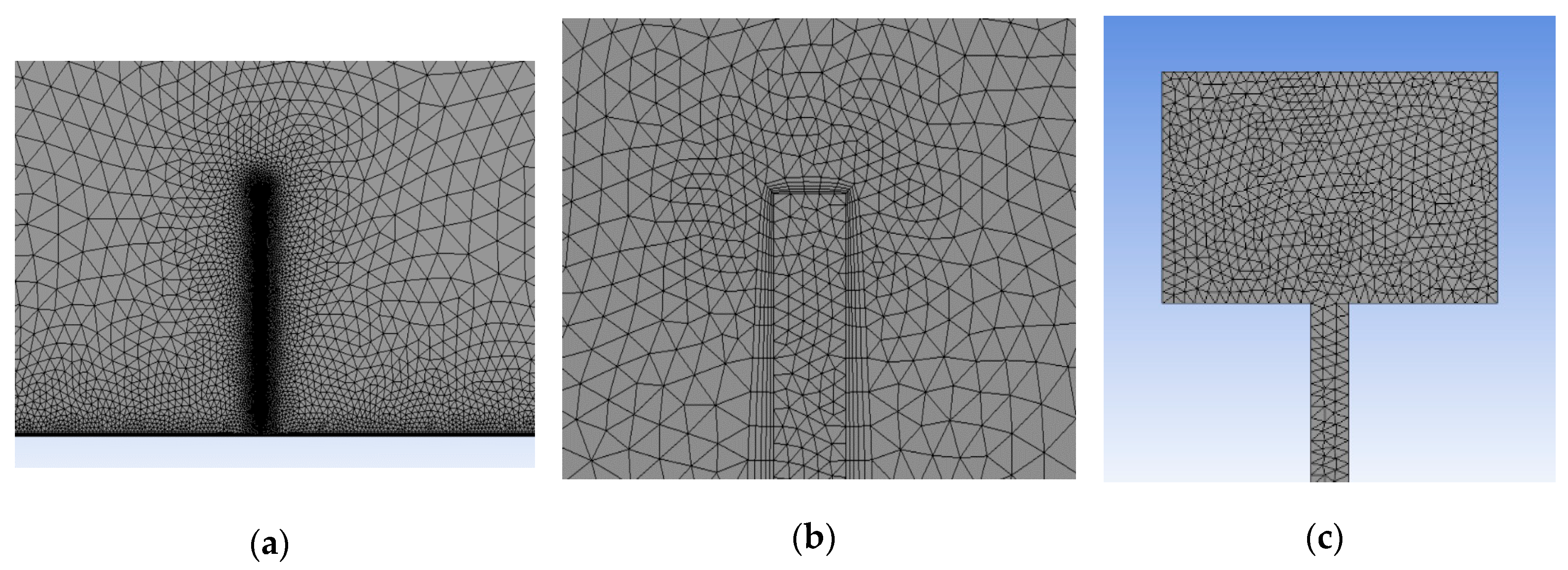
2.8. Computational Model Geometry, Boundary Conditions, and Meshing
3. Results and Discussion
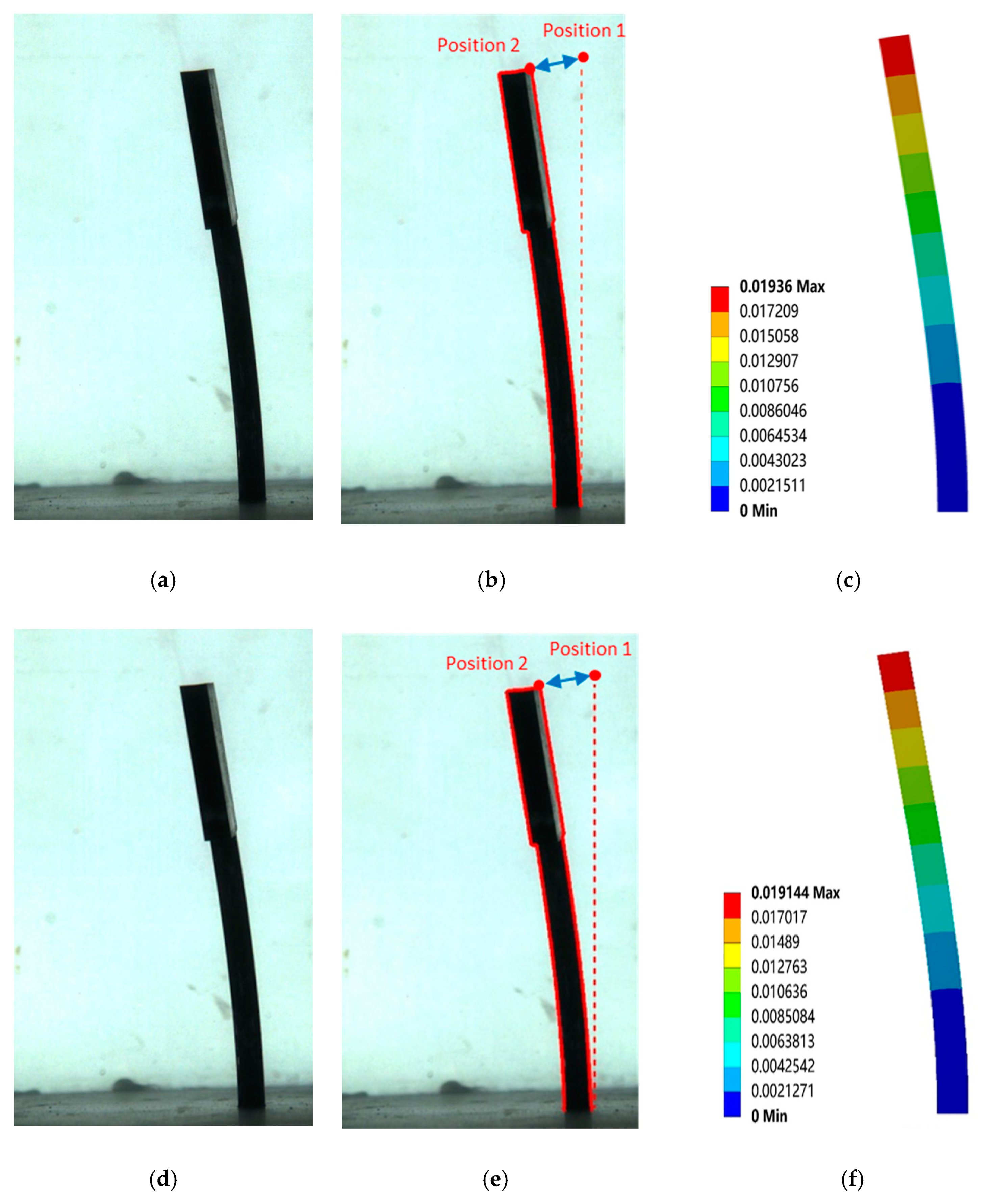
3.1. Comparison between Experimental and Numerical Results
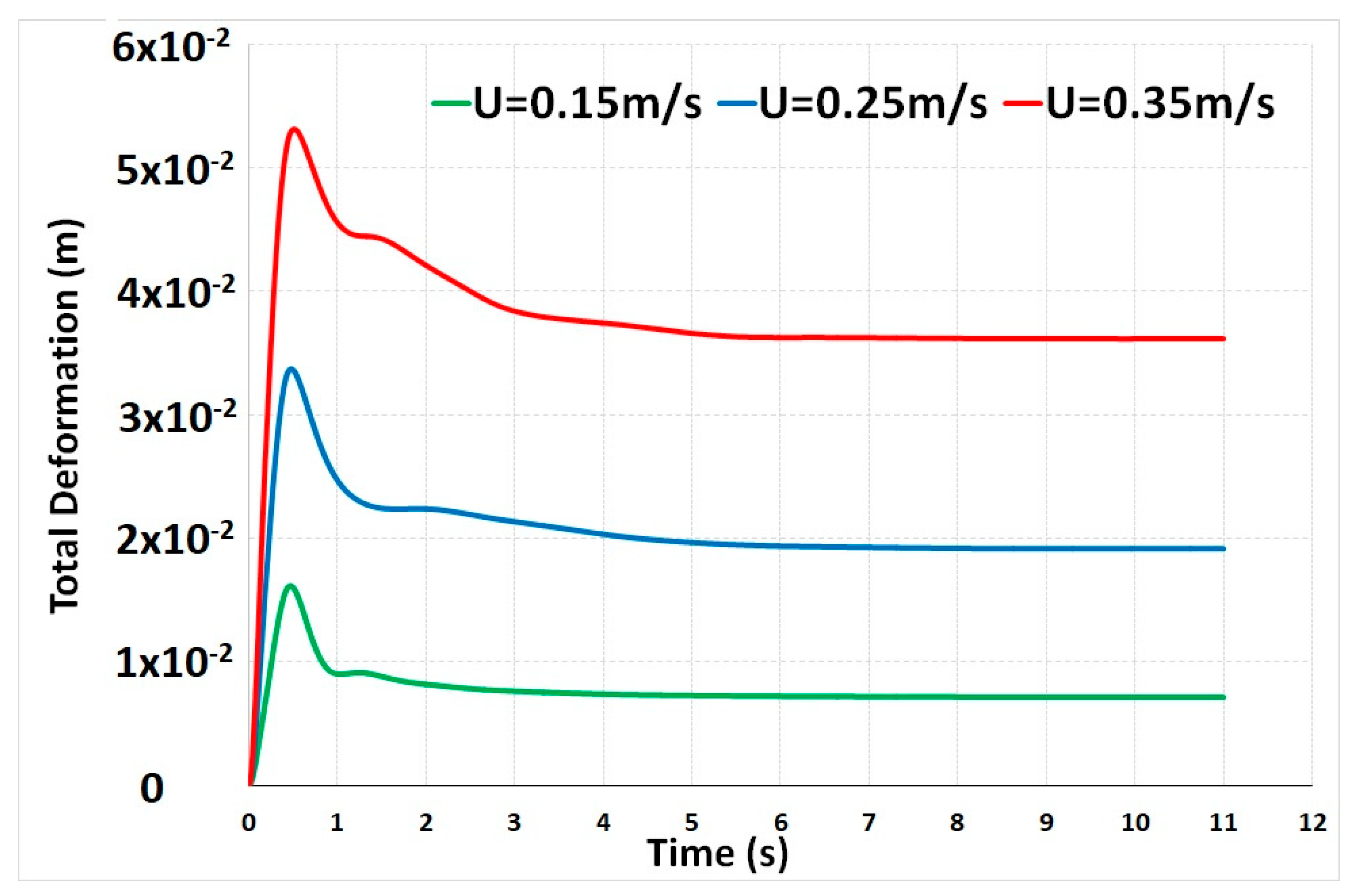
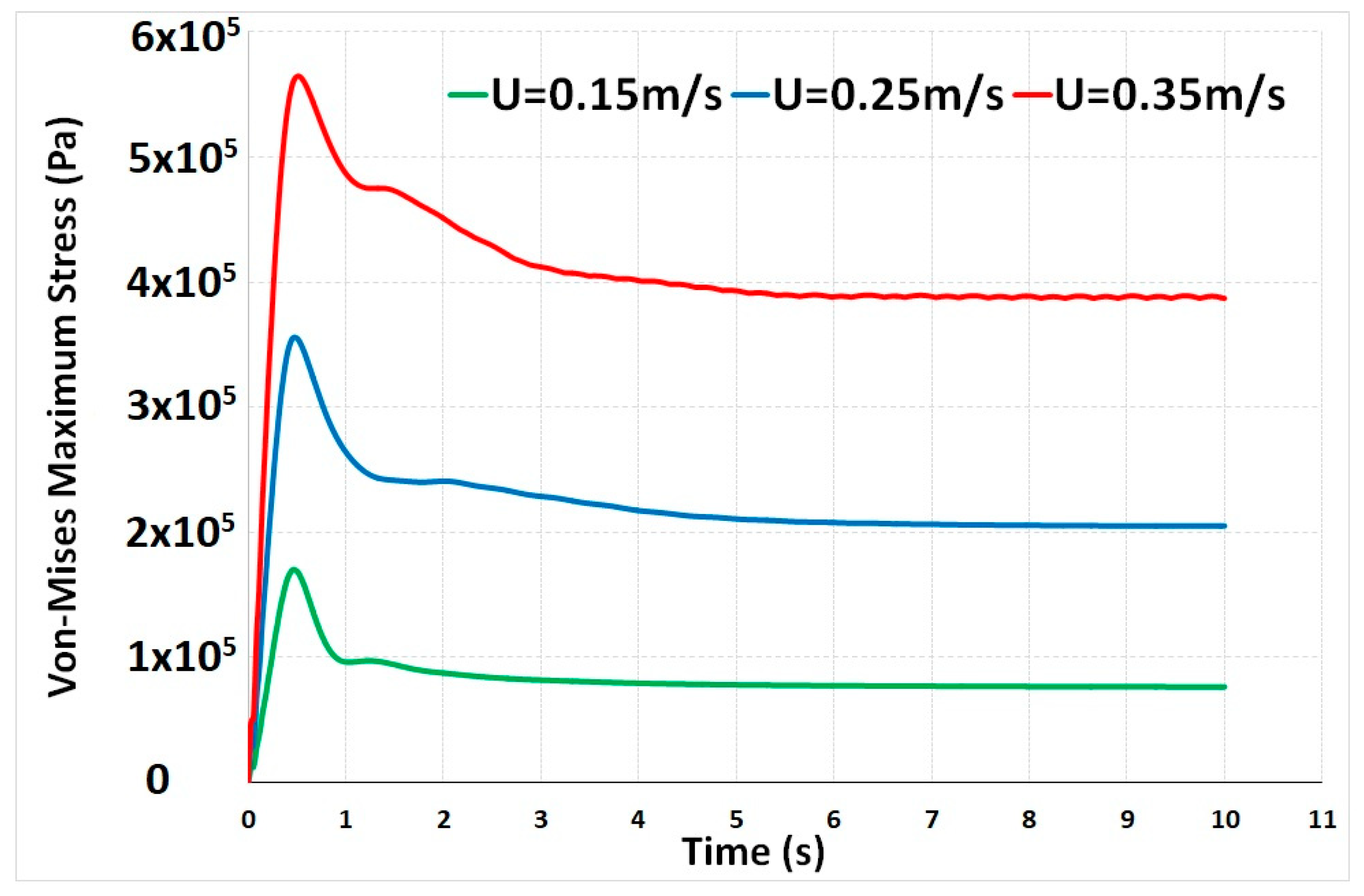
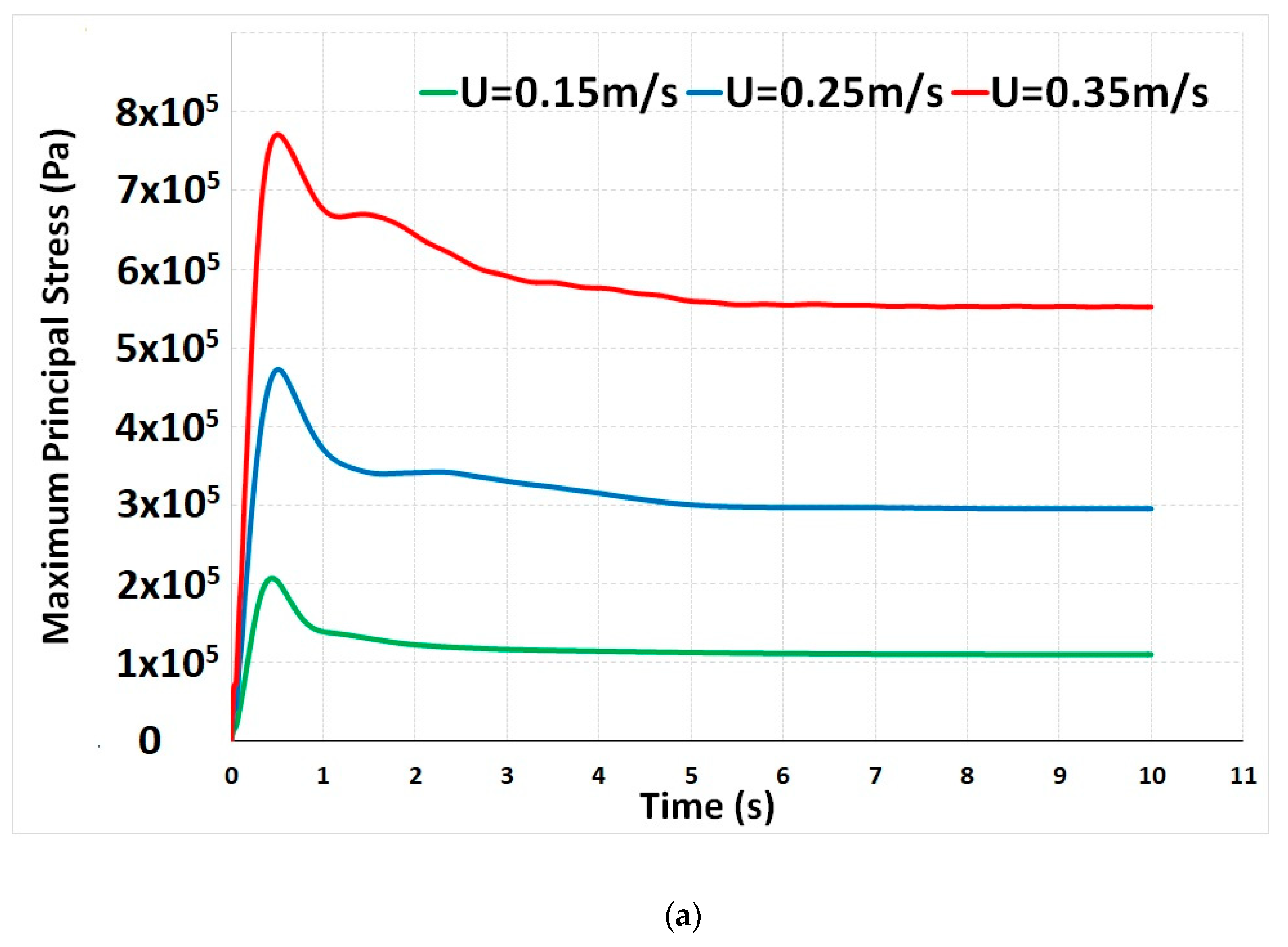
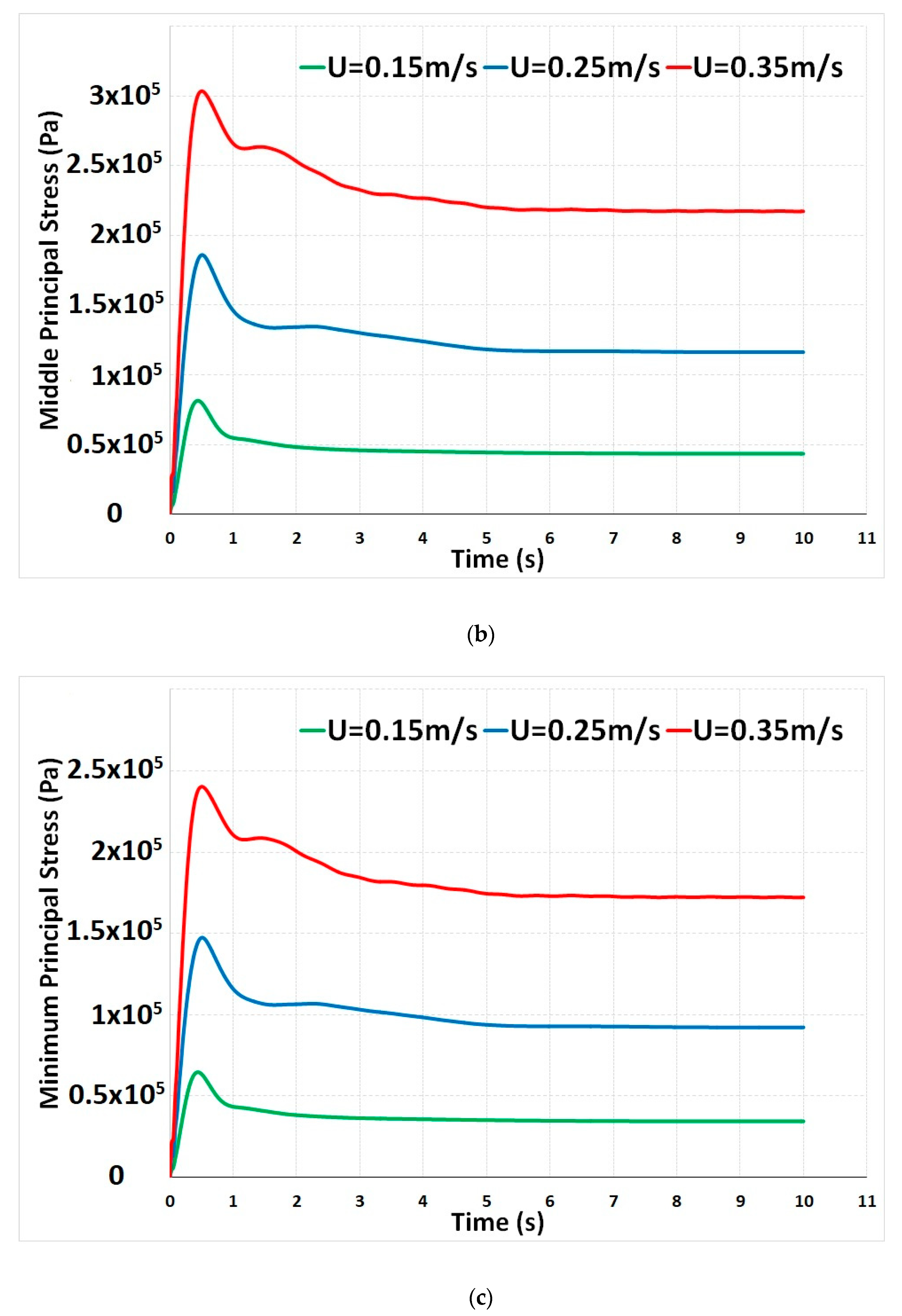
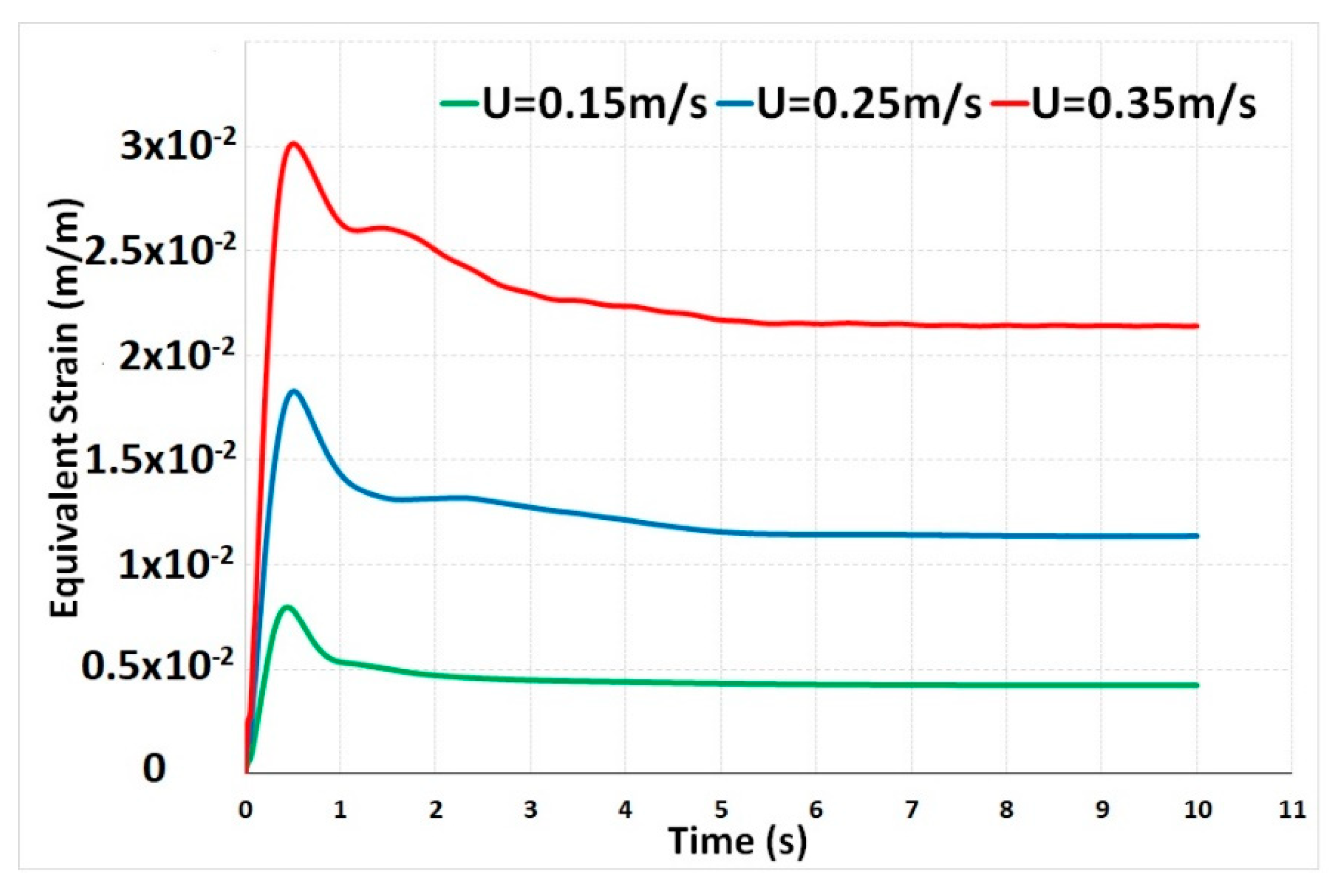
3.2. Deformation and Stress Study
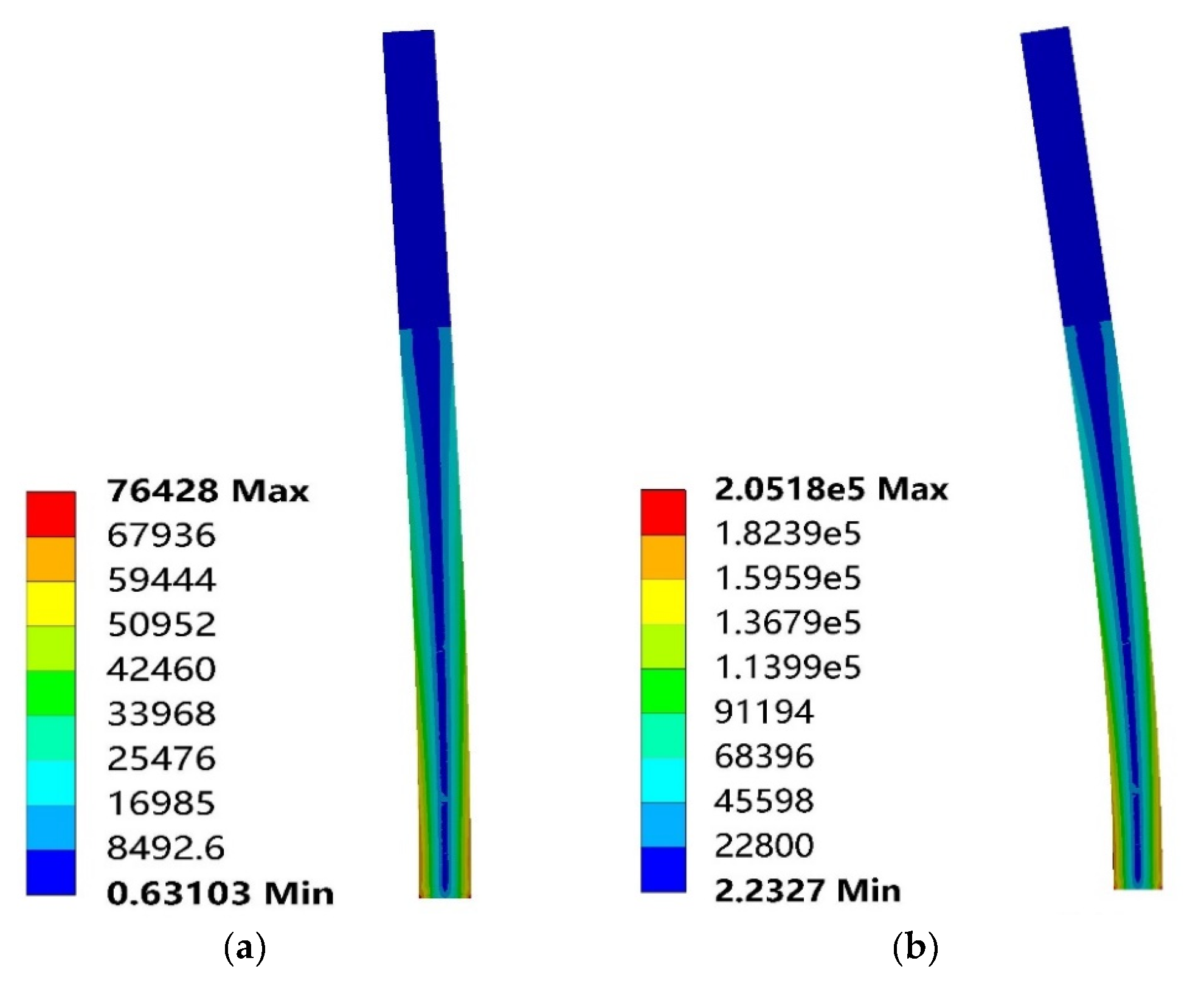
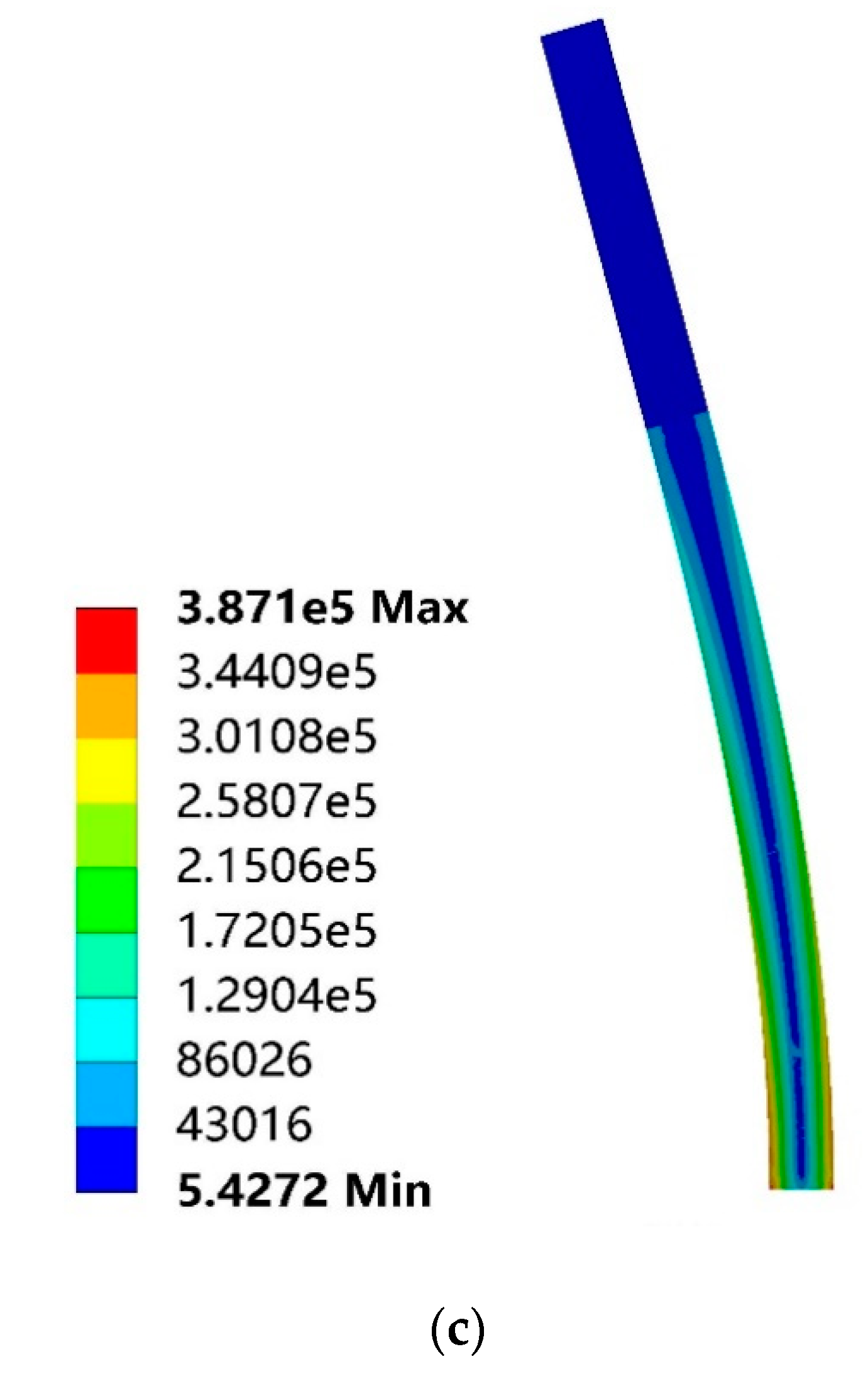
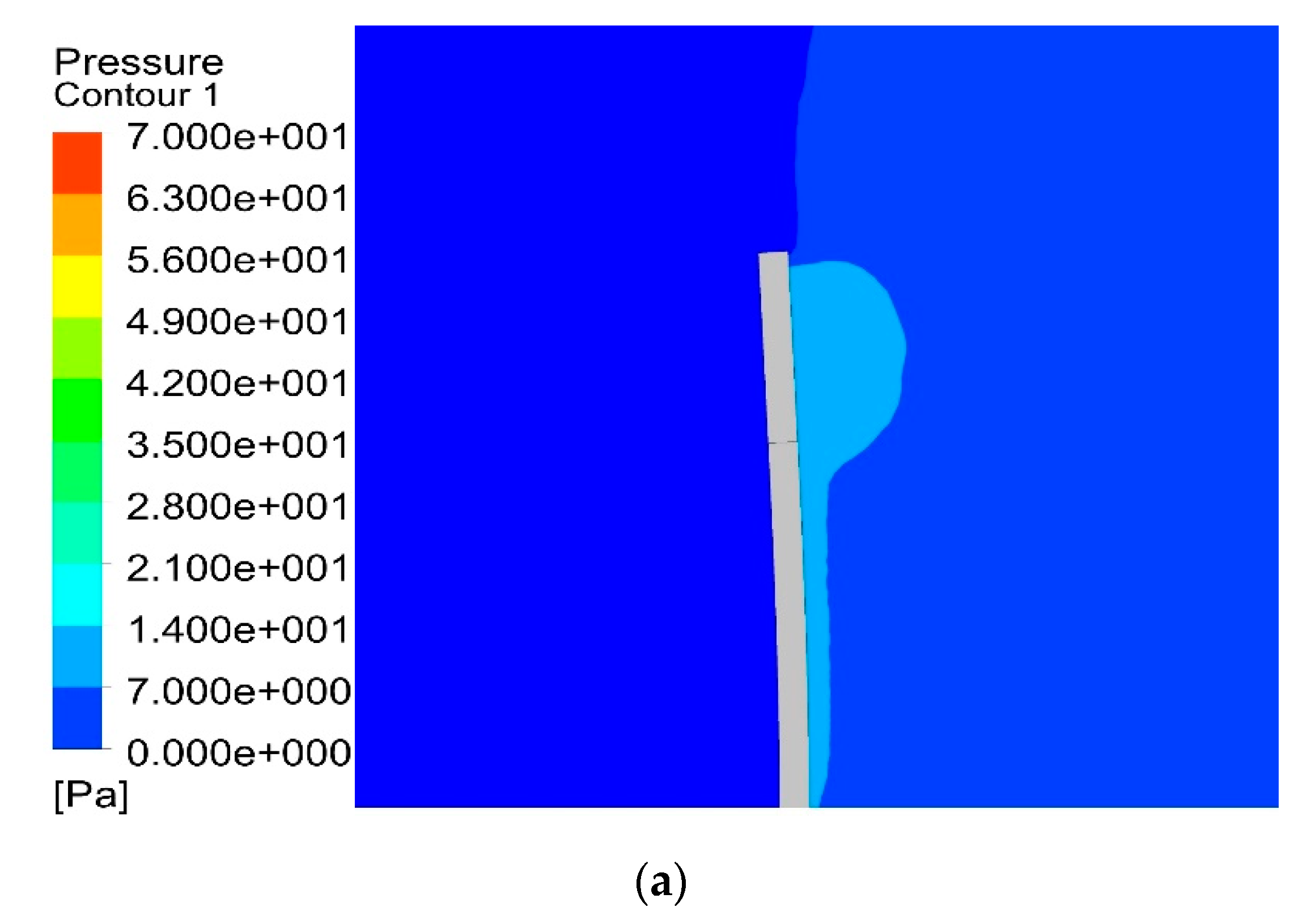
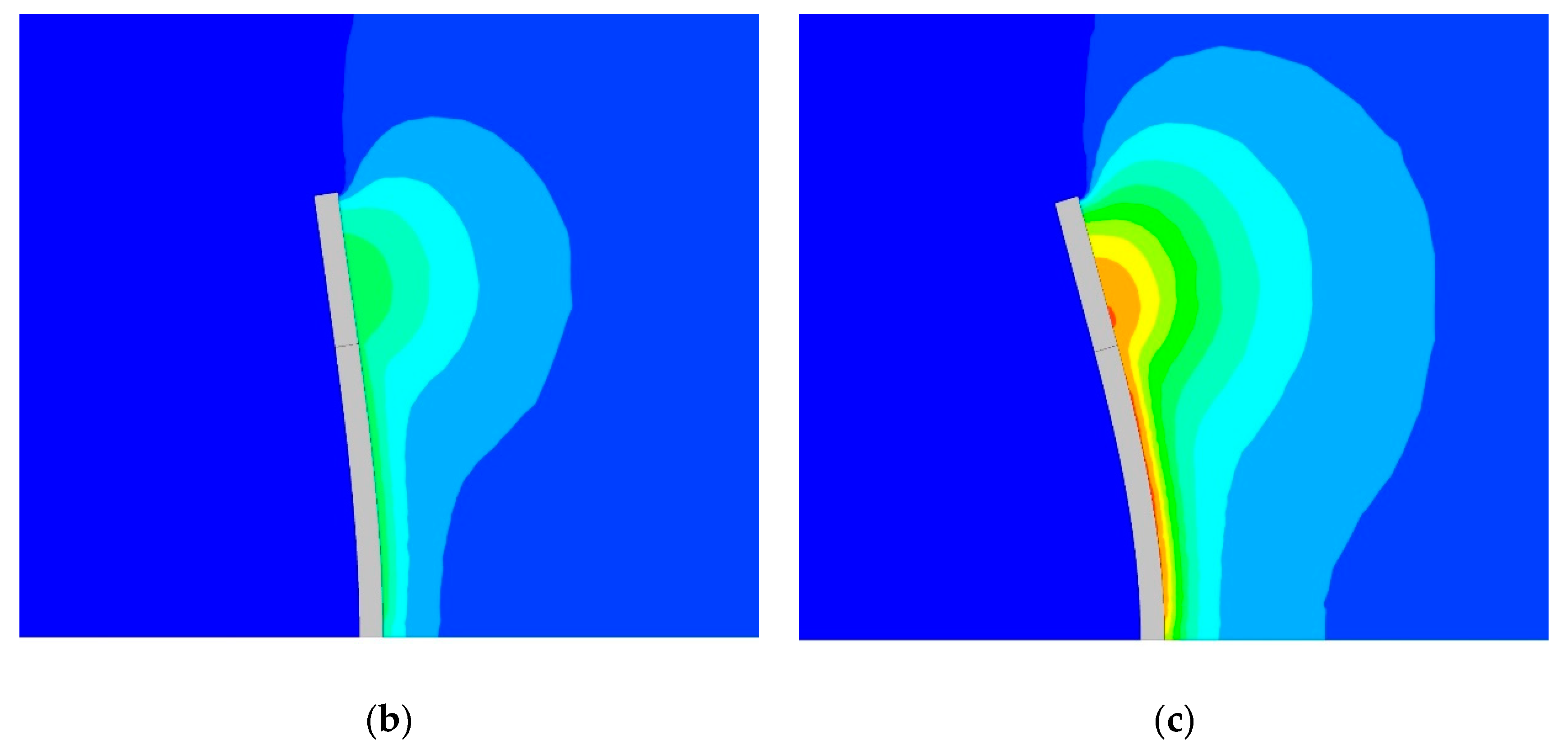
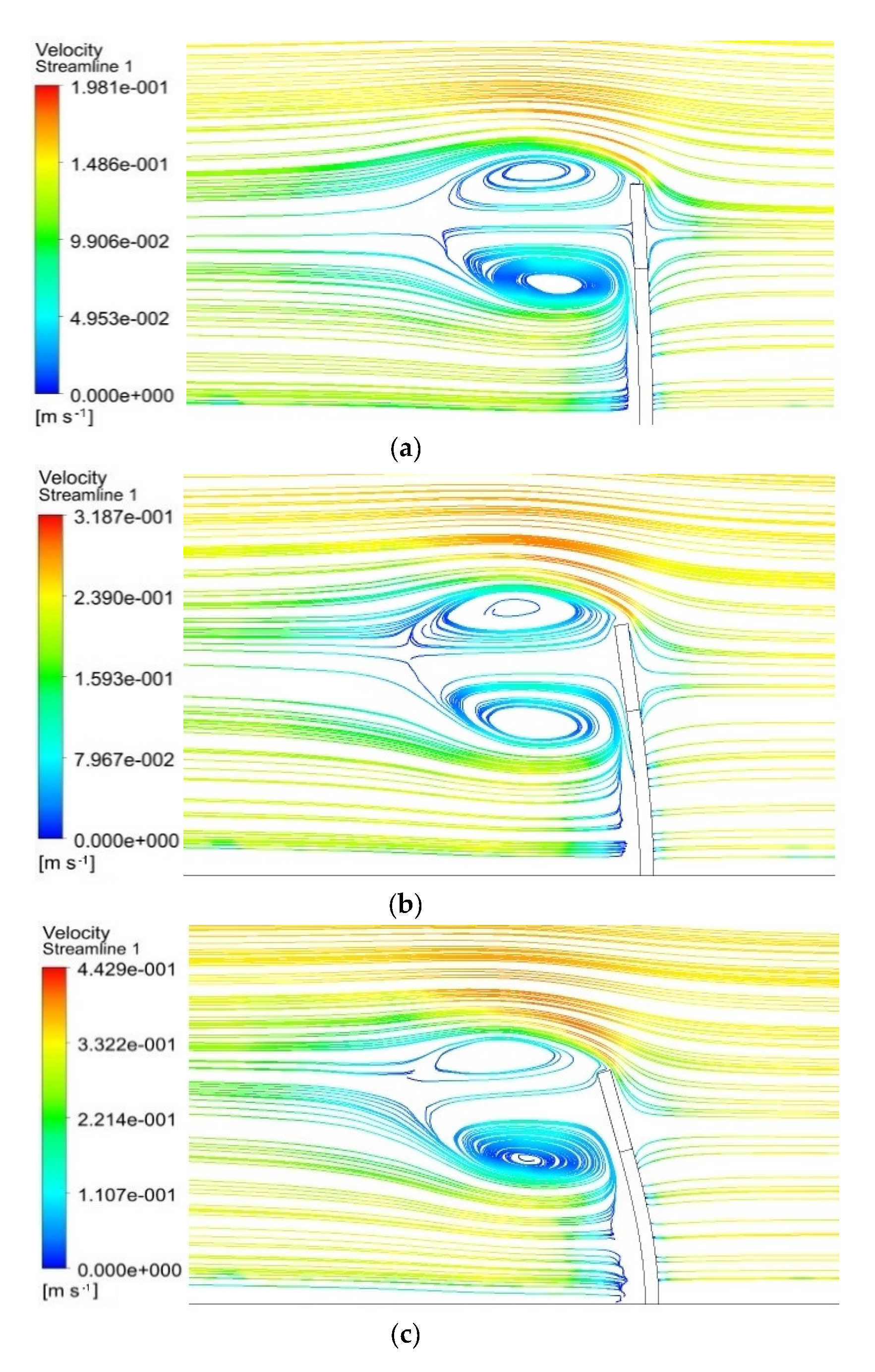
3.3. Contours Plots of Numerical Study
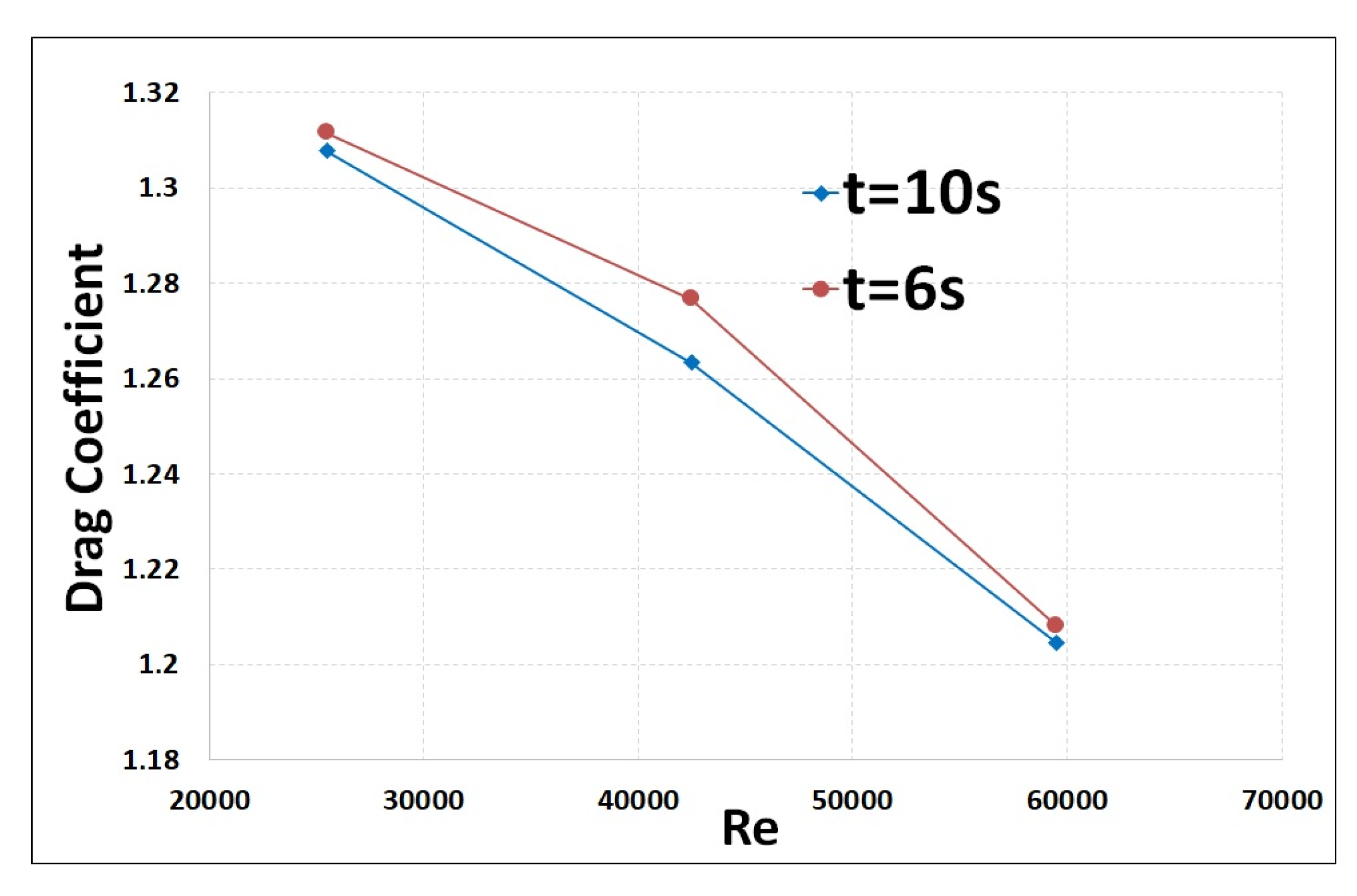
3.4. Drag Coefficients Study
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chimakurthi, S.K.; Reuss, S.; Tooley, M.; Scampoli, S. ANSYS workbench system coupling: A state-of-the-art computational framework for analyzing multiphysics problems. Eng. Comput. 2017, 34, 385–411. [Google Scholar] [CrossRef]
- Gluck, M.; Breuer, M.; Durst, F.; Halfmann, A.; Rank, E. Computation of fluid–structure interaction on lightweight structures. J. Wind Eng. Ind. Aerodyn. 2001, 89, 1351–1368. [Google Scholar] [CrossRef]
- Dhavalikar, S.; Awasare, S.; Joga, R.; Kar, A.R. Whipping response analysis by one way fluid structure interaction—A case study. Ocean Eng. 2015, 103, 10–20. [Google Scholar] [CrossRef]
- Narayanan, K.V.; Vengadesan, S.; Murali, K. Wall proximity effects on the flow past cylinder with flexible filaments. Ocean Eng. 2018, 157, 54–61. [Google Scholar] [CrossRef]
- Hassani, M.; Mureithi, N.W.; Gosselin, F.P. Large coupled bending and torsional deformation of an elastic rod subjected to fluid flow. J. Fluids Struct. 2016, 62, 367–383. [Google Scholar] [CrossRef]
- Juan, J.S.; Carrillo, G.V.; Tinoco, R.O. Experimental observations of 3D flow alterations by vegetation under oscillatory flows. Environ. Fluid Mech. 2019, 19, 1497–1525. [Google Scholar] [CrossRef]
- Mantecon, J.G.; Neto, M.M. Numerical methodology for fluid-structure interaction analysis of nuclear fuel plates under axial flow conditions. Nucl. Eng. Des. 2018, 333, 76–86. [Google Scholar] [CrossRef]
- Ghelardi, S.; Freda, A.; Rizzo, C.M.; Villa, D. A fluid structure interaction case study on a square sail in a wind tunnel. Ocean Eng. 2018, 163, 136–147. [Google Scholar] [CrossRef]
- Liu, Z.G.; Liu, Y.; Lu, J. Fluid-structure interaction of single cylinder in axial flow. Comput. Fluids 2012, 56, 143–151. [Google Scholar] [CrossRef]
- Xu, L.; Tian, F.-B.; Young, J.; Lai, J.C.S. A novel geometry-adaptive Cartesian grid based immersed boundary–lattice Boltzmann method for fluid–structure interactions at moderate and high Reynolds numbers. J. Comput. Phys. 2018, 375, 22–56. [Google Scholar] [CrossRef]
- Wang, C.; Sun, M.; Shankar, S.; Xing, S.; Zhang, L. CFD Simulation of Vortex Induced Vibration for FRP composite riser with different modeling methods. Appl. Sci. 2018, 8, 684. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.; Chen, W.; Shi, S. Coupling motion and energy harvesting of two side-by-side flexible plates in a 3D uniform flow. Appl. Sci. 2016, 6, 141. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Currao, G.M.D.; Han, F.; Neely, A.J.; Young, J.; Tian, F.B. An immersed boundary method for fluid–structure interaction with compressible multiphase flows. J. Comput. Phys. 2017, 346, 131–151. [Google Scholar] [CrossRef] [Green Version]
- Turek, S.; Hron, J. Proposal for numerical benchmarking of fluid-structure interaction between an elastic object and laminar incompressible flow. Fluid Struct. Interact. 2006, 53, 371–385. [Google Scholar]
- Wang, H.; Zhai, Q.; Zhang, J. Numerical study of flow-induced vibration of a flexible plate behind a circular cylinder. Ocean Eng. 2018, 163, 419–430. [Google Scholar] [CrossRef]
- Zheng, X.; Xue, Q.; Mittal, R.; Beilamowicz, S. A coupled sharp-interface immersed boundary-finite-element method for flow-structure interaction with application to human phonation. J. Biomech. Eng. 2010, 132. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Avital, E.J.; Bai, X.; Ji, C.; Xu, D.; Williams, J.J.; Munjiza, A. Fluid–structure interaction of flexible submerged vegetation stems and kinetic turbine blades. Comput. Part. Mech. 2019. [Google Scholar] [CrossRef] [Green Version]
- Mittal, R.; Dong, H.; Bozkurttas, M.; Najjar, F.M.; Vargas, A.; Von Loebbecke, A. A versatile sharp interface immersed boundary method for incompressible flows with complex boundaries. J. Comput. Phys. 2008, 227, 4825–4852. [Google Scholar] [CrossRef] [Green Version]
- Nestola, M.G.C.; Becsek, B.; Zolfaghari, H.; Zulian, P.; Marinis, D.D.; Krause, R.; Obrist, D. An immersed boundary method for fluid-structure interaction based on variational transfer. J. Comput. Phys. 2019, 398, 108884. [Google Scholar] [CrossRef]
- Peskin, C.S. The immersed boundary method. Acta Numer. 2002, 11, 479–517. [Google Scholar] [CrossRef] [Green Version]
- Hron, J.; Turek, J. A monolithic FEM/multigrid solver for an ALE formulation of fluid-structure interaction with applications in biomechanics. Fluid Struct. Interact. 2006, 146–170. [Google Scholar] [CrossRef]
- Griffith, B.E.; Luo, X. Hybrid finite difference/finite element immersed boundary method. Int. J. Numer. Methods Biomed. Eng. 2017, 33. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nassiri, A.; Chini, G.; Vivek, A.; Daehn, G.; Kinsey, B. Arbitrary Lagrangian–Eulerian finite element simulation and experimental investigation of wavy interfacial morphology during high velocity impact welding. Mater. Des. 2015, 88, 345–358. [Google Scholar] [CrossRef]
- Tabatabaei-Malazi, M.; Okbaz, A.; Olcay, A.B. Numerical investigation of a longfin inshore squid’s flow characteristics. Ocean Eng. 2015, 108, 462–470. [Google Scholar] [CrossRef]
- Olcay, A.B.; Tabatabaei-Malazi, M.; Okbaz, A.; Heperkan, H.A.; Firat, E.; Ozbolat, V.; Gokcen, M.G.; Sahin, B. Experimental and numerical investigation of a longfin inshore squid’s flow characteristics. J. Appl. Fluid Mech. 2017, 10, 21–30. [Google Scholar] [CrossRef]
- Eren, E.T.; Tabatabaei-Malazi, M.; Temir, G. Numerical investigation on the collision between a solitary wave and a moving cylinder. Water 2020, 12, 2167. [Google Scholar] [CrossRef]
- Howse, J. OpenCV Computer Vision with Python; Packt Publishing Ltd.: Birmingham, UK, 2013. [Google Scholar]
- Olcay, A.B.; Tabatabaei-Malazi, M. The effects of a longfin inshore squid’s fins on propulsive efficiency during underwater swimming. Ocean Eng. 2016, 128, 173–182. [Google Scholar] [CrossRef]
- ANSYS Fluent Theory Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2016; pp. 39–136.
- Bathe, K.J. Finite Element Procedures; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Chung, J.; Hulbert, G.M. A time integration algorithm for structure dynamic with improved numerical dissipation: The generalized-α method. J. Appl. Mech. 1993, 60, 371. [Google Scholar] [CrossRef]
- Batchelor, G.K. An Introduction to Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Vasudev, K.L.; Sharma, R.; Bhattacharyya, S.K. A multi-objective optimization design framework integrated with CFD for the design of AUVs. Methods Oceanogr. 2014, 10, 138–165. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water | |
| Density (ρ) | 1000 kg/m3 |
| Dynamic viscosity (µ) | 0.001 kg/m−s |
| Flexible Beam | |
| Density (ρs) | 1.17 g/cm3 |
| Young’s modulus (E) | 18 MPa |
| Poisson’s ratio (ν) | 0.3 |
| Velocity (m/s) | Reynolds Number | Applied |
|---|---|---|
| 0.15 | 25,500 | Numerical model |
| 0.25 | 42,500 | Numerical and experimental model |
| 0.35 | 59,500 | Numerical model |
| Mesh Resolution | Deformation at t = 10 s |
|---|---|
| 810,000 | 0.022400 |
| 890,000 | 0.01989 |
| 920,000 | 0.01934 |
| 1,020,000 | 0.019147 |
| 1,040,000 | 0.019144 |
| Re = 42,500 | t = 6 s (Figure 8a–c) | t = 10 s (Figure 8d–f) |
|---|---|---|
| Experimental model deformation (m) | 0.0205 ± 0.001 | 0.0202 ± 0.001 |
| Numerical model deformation (m) | 0.0193 | 0.0191 |
| Reynolds Umbers | Drag Force, t = 6 s | Drag Force, t = 10 s |
|---|---|---|
| 25,500 (U = 0.15 m/s) | 0.09591 | 0.09563 |
| 42,500 (U = 0.25 m/s) | 0.25932 | 0.25663 |
| 59,500 (U = 0.35 m/s) | 0.48103 | 0.47961 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tabatabaei Malazi, M.; Eren, E.T.; Luo, J.; Mi, S.; Temir, G. Three-Dimensional Fluid–Structure Interaction Case Study on Elastic Beam. J. Mar. Sci. Eng. 2020, 8, 714. https://doi.org/10.3390/jmse8090714
Tabatabaei Malazi M, Eren ET, Luo J, Mi S, Temir G. Three-Dimensional Fluid–Structure Interaction Case Study on Elastic Beam. Journal of Marine Science and Engineering. 2020; 8(9):714. https://doi.org/10.3390/jmse8090714
Chicago/Turabian StyleTabatabaei Malazi, Mahdi, Emir Taha Eren, Jing Luo, Shuo Mi, and Galip Temir. 2020. "Three-Dimensional Fluid–Structure Interaction Case Study on Elastic Beam" Journal of Marine Science and Engineering 8, no. 9: 714. https://doi.org/10.3390/jmse8090714