Applying Two Active Acoustic Technologies to Document Presence of Large Marine Animal Targets at a Marine Renewable Energy Site


Abstract
:1. Introduction
2. Materials and Methods
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Papathanasopoulou, E.; Beaumont, N.; Hooper, T.; Nunes, J.; Queirós, A.M. Energy systems and their impacts on marine ecosystem services. Renew. Sustain. Energy Rev. 2015, 52, 917–926. [Google Scholar] [CrossRef]
- Hau, J.L.; Bakshi, B.R. Expanding exergy analysis to account for ecosystem products and services. Environ. Sci. Technol. 2004, 38, 3768–3777. [Google Scholar] [CrossRef] [PubMed]
- Soukissian, T.H.; Denaxa, D.; Karathanasi, F.; Prospathodpoulos, A.; Sarantakos, K.; Iona, A.; Georgantas, K.; Mavrakos, S. Marine Renewable Energy in the Mediterranean Sea: Status and Perspectives. Energies 2017, 10, 1512. [Google Scholar] [CrossRef] [Green Version]
- Boehlert, G.W.; Gill, A.B. Environmental and ecological effects of ocean renewable energy development: A current synthesis. Oceanography 2010, 23, 68–81. [Google Scholar] [CrossRef] [Green Version]
- Shields, M.A.; Woolf, D.K.; Grist, E.P.; Kerr, S.A.; Jackson, A.C.; Harris, R.E.; Bell, M.C.; Beharie, R.; Want, A.; Osalusi, E. Marine renewable energy: The ecological implications of altering the hydrodynamics of the marine environment. Ocean Coast. Manag. 2011, 54, 2–9. [Google Scholar] [CrossRef]
- Gill, A.B. Offshore renewable energy: Ecological implications of generating electricity in the coastal zone. J. Appl. Ecol. 2005, 42, 605–615. [Google Scholar] [CrossRef] [Green Version]
- Jansujwicz, J.S.; Johnson, T.R. Understanding and informing permitting decisions for tidal energy development using an adaptive management framework. Estuaries Coasts 2015, 38, 253–265. [Google Scholar] [CrossRef] [Green Version]
- Cada, G.; Ahlgrimm, J.; Bahleda, M.; Bigford, T.; Stavrakas, S.D.; Hall, D.; Moursund, R.; Sale, M. Potential impacts of hydrokinetic and wave energy conversion technologies on aquatic environments. Fisheries 2007, 32, 174–181. [Google Scholar] [CrossRef]
- Scherelis, C.; Penesis, I.; Marsh, P.; Cossu, R.; Hemer, M.; Wright, J. Relating fish distributions to physical characteristics of a tidal energy candidate site in the Banks Strait, Australia. In Proceedings of the 13th European Wave and Tidal Energy Conference (EWTEC2019), Naples, Italy, 1–6 September 2019. [Google Scholar]
- Viehman, H.A.; Boucher, T.; Redden, A. Winter and summer differences in probability of fish encounter (spatial overlap) with MHK devices. Int. Mar. Energy J. 2018, 1, 9–18. [Google Scholar] [CrossRef]
- Viehman, H.A.; Zydlewski, G.B.; McCleave, J.D.; Staines, G.J. Using hydroacoustics to understand fish presence and vertical distribution in a tidally dynamic region targeted for energy extraction. Estuaries Coasts 2015, 38, 215–226. [Google Scholar] [CrossRef]
- Polagye, B.; Copping, A.; Suryan, R.; Kramer, S.; Brown-Saracino, J.; Smith, C. Instrumentation for Monitoring Around Marine Renewable Energy Converters: Workshop Final Report; PNNL-23110 for the U.S. Department of Energy: Washington, DC, USA, 2014. [Google Scholar]
- O’Connor, M.; Lewis, T.; Dalton, G. Weather window analysis of Irish west coast wave data with relevance to operations & maintenance of marine renewables. Renew. Energy 2013, 52, 57–66. [Google Scholar]
- Kofoed, J.P.; Frigaard, P.; Friis-Madsen, E.; Sørensen, H.C. Prototype testing of the wave energy converter wave dragon. Renew. Energy 2006, 31, 181–189. [Google Scholar] [CrossRef] [Green Version]
- Francisco, F.; Sundberg, J. Detection of visual signatures of marine mammals and fish within marine renewable energy farms using multibeam imaging sonar. J. Mar. Sci. Eng. 2019, 7, 22. [Google Scholar] [CrossRef] [Green Version]
- Williamson, B.J.; Blondel, P.; Armstrong, E.; Bell, P.S.; Hall, C.; Waggit, J.J.; Scott, B.E. A self-contained subsea platform for acoustic monitoring of the environment around marine renewable energy devices—Field deployments at wave and tidal energy sites in Orkney, Scotland. IEEE J. Ocean Eng. 2016, 41, 67–81. [Google Scholar]
- Fraser, S.; Williamson, B.; Scott, B.E.; Nikora, V. Active acoustic monitoring in extreme turbulence around marine renewable energy devices. J. Acoust. Soc. Am. 2016, 139, 2174. [Google Scholar] [CrossRef]
- Stein, P.J.; Edson, P. Underwater Active Acoustic Monitoring Network for Marine and Hydrokinetic Energy Projects; Final Technical Report for the US Department of Energy: Washington, DC, USA, 2013. [Google Scholar]
- Cameron, L.W.; Roche, W.K.; Houghton, J.D.; Mensink, P.J. Population structure and spatial distribution of porbeagles (Lamna nasus) in Irish waters. ICES J. Mar. Sci. 2019, 76, 1581–1590. [Google Scholar] [CrossRef]
- Kiilu, B.K.; Kaunda-Arara, B.; Oddenyo, R.M.; Thoya, P.; Njiru, J.M. Spatial distribution, seasonal abundance and exploitation status of shark species in Kenyan coastal waters. Afr. J. Mar. Sci. 2019, 41, 191–201. [Google Scholar] [CrossRef]
- Kinzey, D.; Olson, P.; Gerrodette, T. Marine Mammal Data Collection Procedures on Research Ship Line-Transect Surveys; Administrative Report LJ-00-08; Southwest Fisheries Science Center: San Diego, CA, USA, 2000. [Google Scholar]
- Mellinger, D.K.; Stafford, K.M.; Moore, S.E.; Dziak, R.P.; Matsumoto, H. An overview of fixed passive acoustic observation methods for cetaceans. Oceanography 2007, 20, 36–45. [Google Scholar] [CrossRef] [Green Version]
- Gillespie, D.; Palmer, L.; Macaulay, J.; Sparling, C.; Hastie, G. Passive acoustic methods for tracking the 3D movements of small cetaceans around marine structures. PLoS ONE 2020, 15, e0229058. [Google Scholar] [CrossRef]
- ORPC; Maine LLC. 156 FERC ¶ 62,032, Order Issuing Preliminary Permit; Project No. P-14743; ORPC: Portland, ME, USA, 2016. [Google Scholar]
- Kovacs, K.M.; Jonas, K.M.; Welke, S.E. Sex and age segregation by Phoca vitulina concolor at haul-out sites during the breeding season in the Passamaquoddy Bay region, New Brunswick. Mar. Mammal. Sci. 1990, 6, 204–214. [Google Scholar] [CrossRef]
- ORPC. FERC Project Progress Report No. 6; Western Passage Tidal Energy Project (P-12680); ORPC: Portland, ME, USA, 2013; p. 67. [Google Scholar]
- Staines, G.J.; Zydlewski, G.B.; Viehman, H.A. Changes in Relative Fish Density Around a Deployed Tidal Turbine During on-water Activities. Sustainability 2019, 11, 6262. [Google Scholar] [CrossRef] [Green Version]
- Staines, G.; Zydlewski, G.; Viehman, H.; Shen, H.; McCleave, J. Changes in vertical fish distributions near a hydrokinetic device in Cobscook Bay, Maine, USA. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015; pp. 6–11. [Google Scholar]
- Benoit-Bird, K.J.; Southall, B.L.; Moline, M.A. Dynamic foraging by Risso’s dolphins revealed in four dimensions. Mar. Ecol. Prog. Ser. 2019, 632, 221–234. [Google Scholar] [CrossRef]
- Geoffroy, M.; Rousseau, S.; Knudsen, F.R.; Fortier, L. Target strengths and echotraces of whales and seals in the Canadian Beaufort Sea. ICES J. Mar. Sci. 2016, 73, 451–463. [Google Scholar] [CrossRef]
- Au, W.L. Acoustic reflectivity of a dolphin. J. Acoust. Soc. Am. 1996, 99, 3844–3848. [Google Scholar] [CrossRef] [PubMed]
- Benoit-Bird, K.J.; Au, W.W. Phonation behavior of cooperatively foraging spinner dolphins. J. Acoust. Soc. Am. 2009, 125, 539–546. [Google Scholar] [CrossRef]
- Benoit-Bird, K.J.; Au, W.W. Cooperative prey herding by the pelagic dolphin, Stenella longirostris. J. Acoust. Soc. Am. 2009, 125, 125–137. [Google Scholar] [CrossRef] [Green Version]
- Athearn, K.; Bartlett, C. Saltwater Fishing in Cobscook Bay: Angler Profile and Economic Impact; The University of Maine: Orono, ME, USA, 2008; Volume 6. [Google Scholar]
- Brooks, D.A. The tidal-stream energy resource in Passamaquoddy—Cobscook Bays: A fresh look at an old story. Renew. Energy 2006, 31, 2284–2295. [Google Scholar] [CrossRef]
- Brooks, D.A. Tides and tidal power in Passamaquoddy Bay: A numerical simulation. Cont. Shelf Res. 1992, 12, 675–716. [Google Scholar] [CrossRef]
- Viehman, H.A. Fish in a Tidally Dynamic Region in Maine: Hydroacoustic Assessments in Relation to Tidal Power Development. Master’s Thesis, University of Maine, Orono, ME, USA, 2012. [Google Scholar]
- Doksæter, L.; Godø, O.R.; Olsen, E.; Nøttestad, L.; Patel, R. Ecological studies of marine mammals using a seabed-mounted echosounder. ICES J. Mar. Sci. 2009, 66, 1029–1036. [Google Scholar] [CrossRef]
- Lieber, L.; Nimmo-Smith, W.A.M.; Waggitt, J.J.; Kregting, L. Fine-scale hydrodynamic metrics underlying predator occupancy patterns in tidal stream environments. Ecol. Indic. 2018, 94, 397–408. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.; Zydlewski, G.B.; Viehman, H.A.; Staines, G. Estimating the probability of fish encountering a marine hydrokinetic device. Renew. Energy 2016, 97, 746–756. [Google Scholar] [CrossRef] [Green Version]
- Broadhurst, M.; Barr, S.; Orme, C.D.L. In-Situ ecological interactions with a deployed tidal energy device; an observational pilot study. Ocean Coast. Manag. 2014, 99, 31–38. [Google Scholar] [CrossRef]
- Fraser, S.; Williamson, B.J.; Nikora, V.; Scott, B.E. Fish Distributions in a tidal channel indicate the behavioural impact of a marine renewable energy installation. Energy Rep. 2018, 4, 65–69. [Google Scholar] [CrossRef]
- Viehman, H.A.; Zydlewski, G.B. Fish interactions with a commercial-scale tidal energy device in the natural environment. Estuaries Coasts 2015, 38, 241–252. [Google Scholar] [CrossRef]
- Benjamins, S.; Macleod, A.; Greenhill, L.; Wilson, B. Surveying marine mammals in nearby tidal energy development sites: A comparison. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015; pp. 6–11. [Google Scholar]
- Halpern, B.S.; Fujita, R. Assumptions, challenges, and future directions in cumulative impact analysis. Ecosphere 2013, 4, 1–11. [Google Scholar] [CrossRef]
- Smit, B.; Spalding, H. Methods for cumulative effects assessment. Environ. Impact Assess. Rev. 1995, 15, 81–106. [Google Scholar] [CrossRef]
- National Marine Fisheries Service. 2018 Revisions To: Technical Guidance for Assessing the Effects of Anthropogenic Sound on Marine Mammal Hearing (Version 2.0): Underwater Thresholds for Onset of Permanent and Temporary Threshold Shifts; NOAA Technical Memorandum NMFS-OPR-59; U.S. Department of Commerce, NOAA: Washington, DC, USA, 2018; p. 167. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
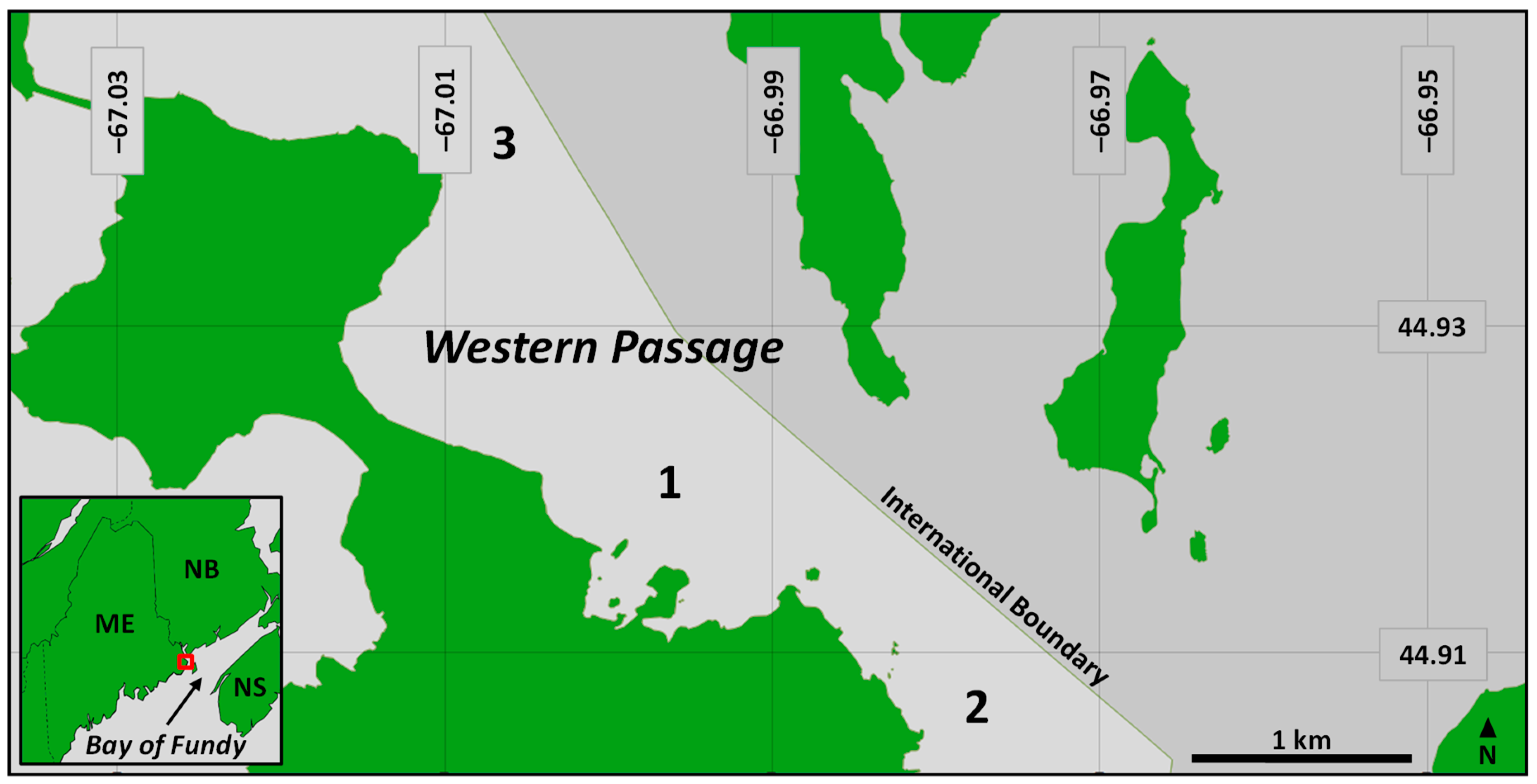
| Site | Longitude | Latitude | Avg. Depth (m) | 2010 Survey Months | 2011 Survey Months |
|---|---|---|---|---|---|
| 1 | 67.998 | 44.922 | 35 | May, Jun, Aug, Sep | May, Jun, Aug, Sep |
| 2 | 66.979 | 44.912 | 31 | May, Jun, Aug, Sep | - |
| 3 | 67.004 | 44.937 | 42 | - | May, Jun, Aug, Sep |
| Year | Month | Site | Detection Rate (h−1) | Visible in DIDSON (Yes/No) | Day or Night | Flood or Ebb Tide | Depth (m) | Current Speed (m·s−1) | Length (m) | Taxon |
|---|---|---|---|---|---|---|---|---|---|---|
| 2010 | May | 1 | 0.08 | N | D | F | 28.5 | 0.31 | - | unknown |
| N | D | F | 40.3 | 0.70 | - | unknown | ||||
| Jun | 2 | 0.04 | N | D | E | 39.4 | 0.39 | - | unknown | |
| Aug | 1 | 0.04 | Y | D | F | 10.4 | 0.26 | 2.10 | Cetacea | |
| 2 | 0.08 | Y | D | E | 11.0 | 0.22 | 2.45 | Cetacea | ||
| Y | N | E | 10.1 | 0.17 | 2.47 | Cetacea | ||||
| Sep | 1 | 0.04 | Y | D | E | 10.8 | 0.36 | - | unknown | |
| 2 | 0.17 | Y | D | E | 9.6 | 0.33 | - | unknown | ||
| Y | D | E | 8.6 | 0.18 | 2.10 | Cetacea | ||||
| Y | D | E | 10.2 | 0.65 | - | Cetacea | ||||
| Y | D | F | 6.9 | 1.61 | - | unknown | ||||
| 2011 | May | 1 | 0.00 | |||||||
| Jun | 3 | 0.00 | ||||||||
| Aug | 1 | 0.13 | Y | D | E | 10.9 | 0.47 | 2.03 | Cetacea | |
| N | D | E | 15.8 | 0.45 | - | unknown | ||||
| Y | D | F | 10.2 | 0.38 | - | unknown | ||||
| 3 | 0.17 | N | D | E | 14.2 | 1.18 | - | unknown | ||
| Y | D | E | 7.6 | 1.20 | 2.77 | Cetacea | ||||
| Y | D | E | 9.2 | 1.10 | 2.21 | Selachii | ||||
| N | D | E | 38.3 | 0.92 | - | unknown | ||||
| Sep | 1 | 0.21 | N | N | E | 24.8 | 0.35 | - | unknown | |
| Y | D | F | 9.9 | 0.88 | 2.15 | Cetacea | ||||
| N | D | F | 15.2 | 0.88 | - | unknown | ||||
| N | D | F | 11.9 | 0.87 | - | unknown | ||||
| N | D | F | 13.5 | 0.36 | - | unknown | ||||
| 3 | 0.25 | Y | D | E | 11.8 | 1.57 | - | unknown | ||
| Y | D | E | 11.6 | 0.81 | - | unknown | ||||
| N | D | F | 25.5 | 1.81 | - | unknown | ||||
| N | D | F | 13.6 | 2.22 | - | unknown | ||||
| N | D | F | 13.0 | 2.20 | - | unknown | ||||
| N | D | F | 12.3 | 2.20 | - | unknown |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Staines, G.; Zydlewski, G.B.; Viehman, H.A.; Kocik, R. Applying Two Active Acoustic Technologies to Document Presence of Large Marine Animal Targets at a Marine Renewable Energy Site. J. Mar. Sci. Eng. 2020, 8, 704. https://doi.org/10.3390/jmse8090704
Staines G, Zydlewski GB, Viehman HA, Kocik R. Applying Two Active Acoustic Technologies to Document Presence of Large Marine Animal Targets at a Marine Renewable Energy Site. Journal of Marine Science and Engineering. 2020; 8(9):704. https://doi.org/10.3390/jmse8090704
Chicago/Turabian StyleStaines, Garrett, Gayle Barbin Zydlewski, Haley A. Viehman, and Rachel Kocik. 2020. "Applying Two Active Acoustic Technologies to Document Presence of Large Marine Animal Targets at a Marine Renewable Energy Site" Journal of Marine Science and Engineering 8, no. 9: 704. https://doi.org/10.3390/jmse8090704