2.1. Experimental Set-Up and Generated Wave Conditions
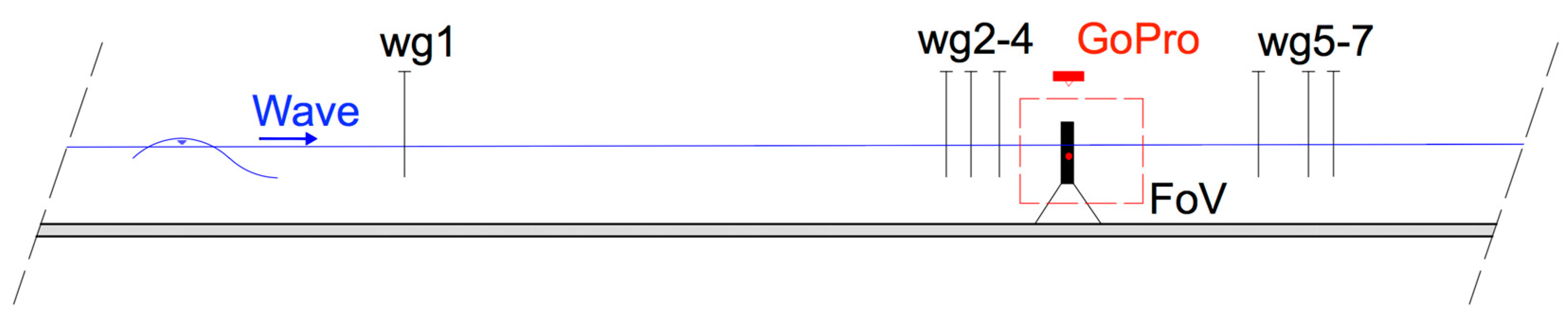
The new experiments on floating body dynamics under waves were carried out in the wave flume of the University of Bologna. The flume, sketched in
Figure 1, is 12 m long, 0.5 m wide and 1.0 m deep, and the waves are generated on the left-hand side by the vertical movement of a cuneiform-shaped piston-type wave-maker [
31,
32]. On the other side of the channel, a wave absorber panel is installed to reduce the wave reflection.
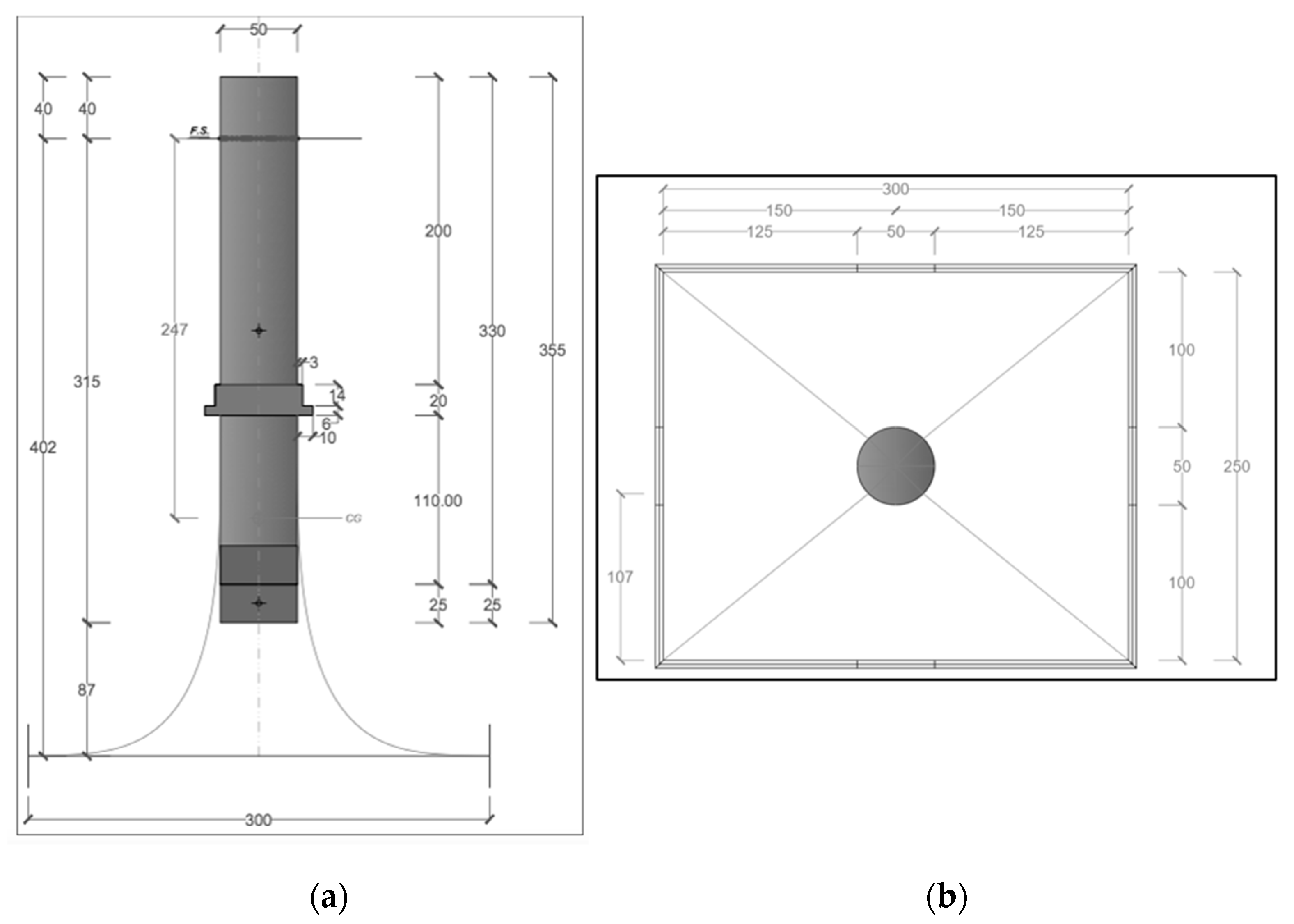
The floating object is a cylindrical and slender object made of plastic and lead:
Figure 2 and
Table 1 report the dimensions of the cylindrical buoy, with the indication of the centers of mass of the single parts and of the rigid body. While most of the hollow structure of the buoy is made of plastic, a lead block is placed at the bottom of the body in order to shift down the center of mass and allowing the buoy to maintain a vertical configuration while floating under waves.
The mooring system of the cylinder (
Figure 2) was made up of four steel chains characterized by a linear density equal to 19.5 g/m, corresponding to a chain nominal diameter of 0.95 mm. The chains were hooked to the buoy through a plastic crown placed 20 cm below the upper surface of the buoy.
The floating cylinder was located at the center of the flume as shown in
Figure 1, moored at its equilibrium position, which was set at around 4.0 m away from the wave-maker.
Since the present tests were carried out in a wave flume, the multi-directionality of the response of the floating object to the waves could not be investigated for two main reasons: First, the implemented videography allows estimating the floating body motion only in the x–z plane through the acquired planar images. In addition, the boundary effects of the walls could not be assumed completely negligible.
The choice of scale for the model was based on the specifications of the wave flume and on the wave conditions to replicate a representative Mediterranean Sea state, reducing the model according to Froude’s law on a scale ratio of 1:64.
A recording system made of seven resistive-type wave gauges (represented in black in
Figure 1) was distributed all along the channel, to acquire at a sampling frequency of 1 kHz the free surface and to reconstruct the incident, reflected and diffracted waves during the tests according to [
33].
Furthermore, two GoPro cameras (in red in
Figure 1) have been installed in order to record at 30 fps in full HD (1920 × 1024 pixel) the floating cylinder movements from the lateral and top sides of the view. The experiments were conducted in a dark environment, with two controlled light sources placed on the top and lateral sides of the flume in order to enhance the image contrast. The list of the experimental conditions is presented in
Table 2.
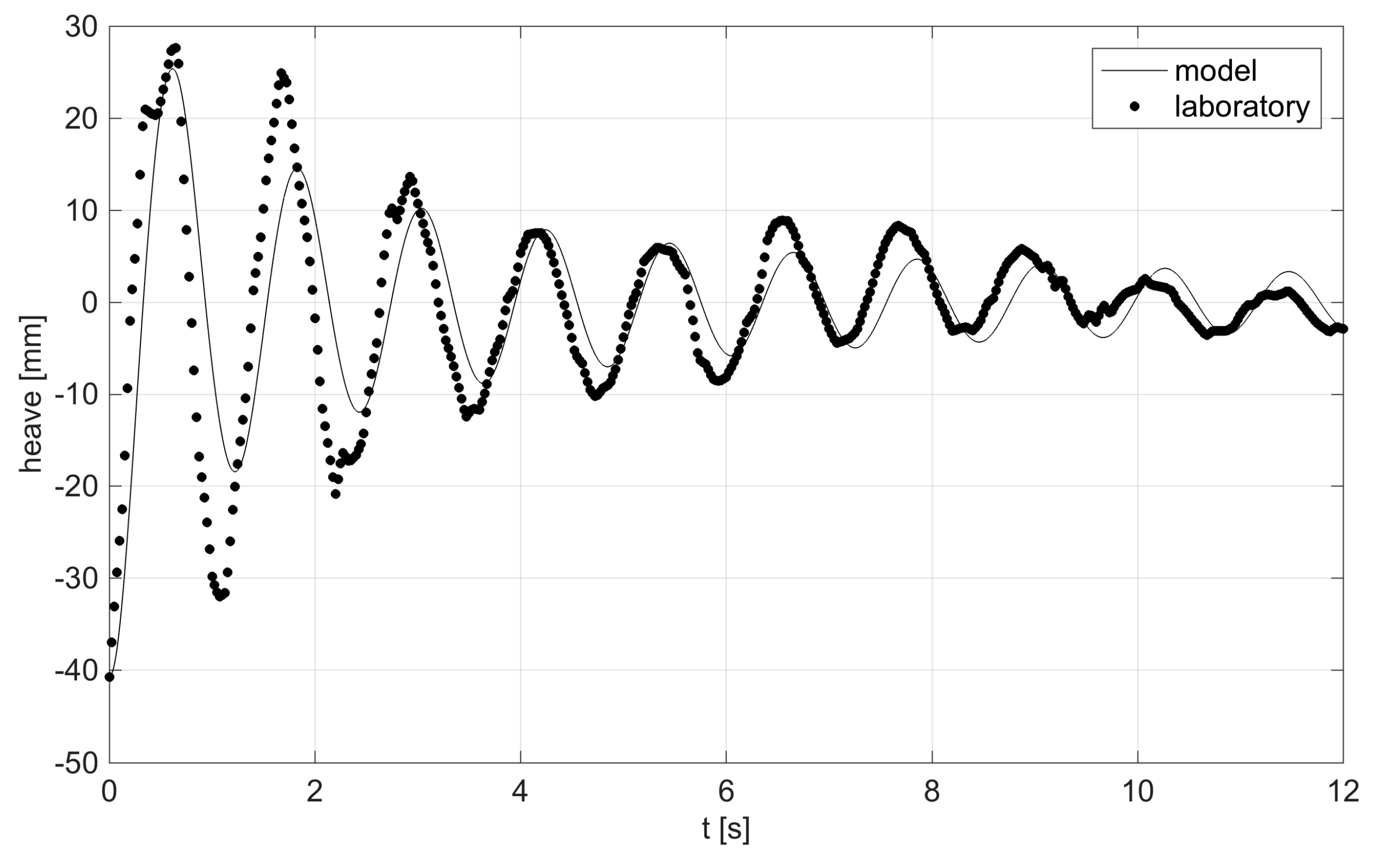
At the beginning, a heave decay test was performed to get the natural frequency of the object, then a set of 6 regular waves was generated in the flume, with the aim to be later easily reproduced by a CFD model.
The reproduced waves were characterized by height
H in the range 0.006–0.030 m, frequency
w in the range 6.60–8.80 s and length
in the range 0.80–1.30 m. The water depth
h at the wave-maker was at maximum equal to 0.4 m and the reflection coefficients
kR in the wave flume during the tests had reached values between 0.12 and 0.25. The generated waves keep being regular, and hence, linear wave theory was used to describe the waves themselves. Linear wave theory was used to distinguish shallow, deep and intermediate water situations for each test and then to study the particle velocity under the waves themselves. First the coefficient
was computed in order to verify which condition among the three previously exposed was satisfied: the resulted conditions are reported in
Table 2, where the values are in the range 0.3–0.5. According to the application areas of wave theories as defined in [
34], the reproduced waves primarily were in intermediate water depths with the exception of wave R03, propagating in a deep depth.
2.2. Video Analysis to Detect Body Dynamics
A videography was implemented to analyze the images acquired by the two GoPro cameras at the lateral and top views during laboratory tests. The implemented procedure largely adopted to estimate the floating object motion by [
35,
36,
37,
38,
39], was developed in a Matlab environment, and consists of the following steps:
(a) Pre-processing, where lens distortion and 2D calibration were performed. The calibration process was performed by using the approach proposed by [
40], where images (at least five) of a planar checkerboard placed in the mid-section of the flume were used. The definition of a conversion factor (from pixel to mm) was performed by taking as input one sample image up to reach a maximum conversion error less than 1 pixel (around < 0.3 mm). Finally, camera intrinsic and extrinsic parameters were provided as a calibration matrix, to obtain the correspondence between the image and the space (real) points. During each test, triggering for these cameras was performed using the GoPro application via Bluetooth. The method was verified by checking, both at rest and during the waves, the cylinder’s dimensions, estimating its height and diameter, and resulting in a mean error of 4% and 9%, respectively;
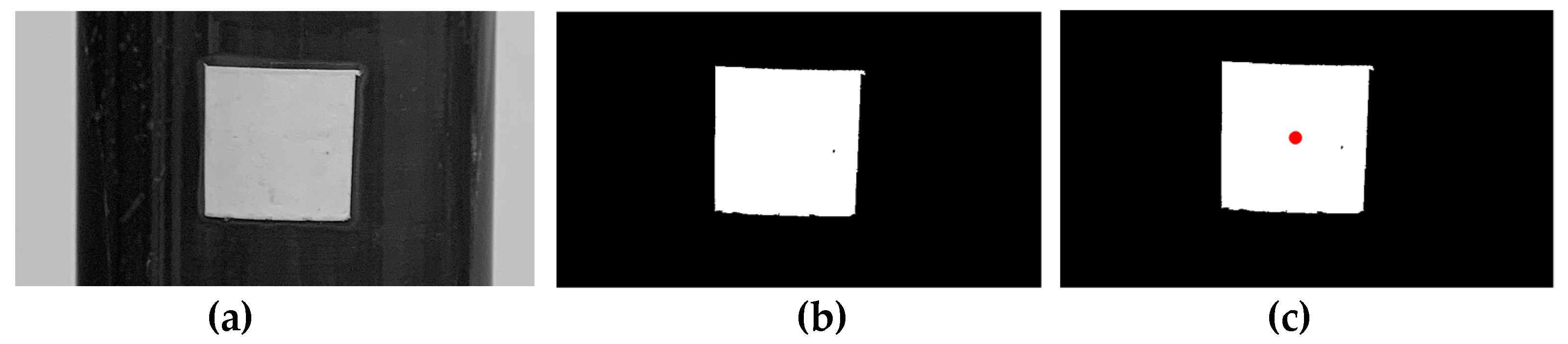
(b) Adjustment of each image, aiming to enhance its quality, intensity and contrast in order to much more easily detect the target points on the surface. Each frame of the recorded videos was cropped in order to analyze a smaller area significantly, follow the object motion and reduce the computational times; and
(c) The final estimation of the cylinder motion, by means of the detection of control points on its surface. In particular, the image analysis consists of the detection of two markers on the cylinder, in order to follow the object translation (surge and heave motions) and rotation (pitch motion) during the tests. The first point is located at the buoy center of mass, not being influenced by rotation, while the second one belongs to the same axis of the first point, in order to estimate the object rigid rotation in the x–z plane, by applying some easy trigonometric calculation.
Figure 3 shows the sequence of the implemented image processing: The cropped frame (a) is adjusted in contrast and transformed in a binary frame (b); then, the detection of the center of the markers (white pixels) is performed to follow the three DoF motion of the object (c).
The implemented image processing could be considered reliable to estimate the motion of the floating object in the x–z plane, and the analysis of the top-side view camera was negligible sway and roll components in the cylinder response to the modelled waves.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













