A Novel Three-SPR Parallel Platform for Vessel Wave Compensation

Abstract
:1. Introduction
2. Movement Analysis of Heave Compensation Platforms
2.1. Working Space Analysis of 3-RPS Parallel Compensation Platform
- The highest and lowest point of the position workspace is determined by the range of three prismatic joints; there is only one point at the highest and lowest points of the compensating workspace, where the compensating platform has no deflection ability.
- The structure of the compensation platform possesses a similar symmetry with its position workspace.
- The slicing area of the position workspace varies with different heights and increases and then decreases from top to bottom.
- Deflection capability of the platform varies with the height of the moving platform. With the height decreases from high to low, the deflection capability of the platform also increases firstly and then decreases.
- Deflection capability of platforms at the same height and in different directions is not the same. With the change of height, the direction of the maximum deflection angle also changes, and the deflection capability of each direction near the height median is relatively average.
2.2. Workspace Analysis of 3-SPR Parallel Compensation Platform
- (1)
- section shape and section area of the position workspace and attitude workspace varies with the height of the moving platform;
- (2)
- shape of the position workspace changes dramatically in the area with lower height, while the shape of the position workspace is inert in the area with higher height;
- (3)
- overall shape of the position workspace and attitude workspace possesses a trilateral symmetry.
2.3. Compensation Feasibility Comparison Analysis
3. Structural Optimization Design of Parallel 3-SPR Compensation Platform
4. Modeling and Analysis of the Optimized 3-SPR Platform
5. Results and Discussion
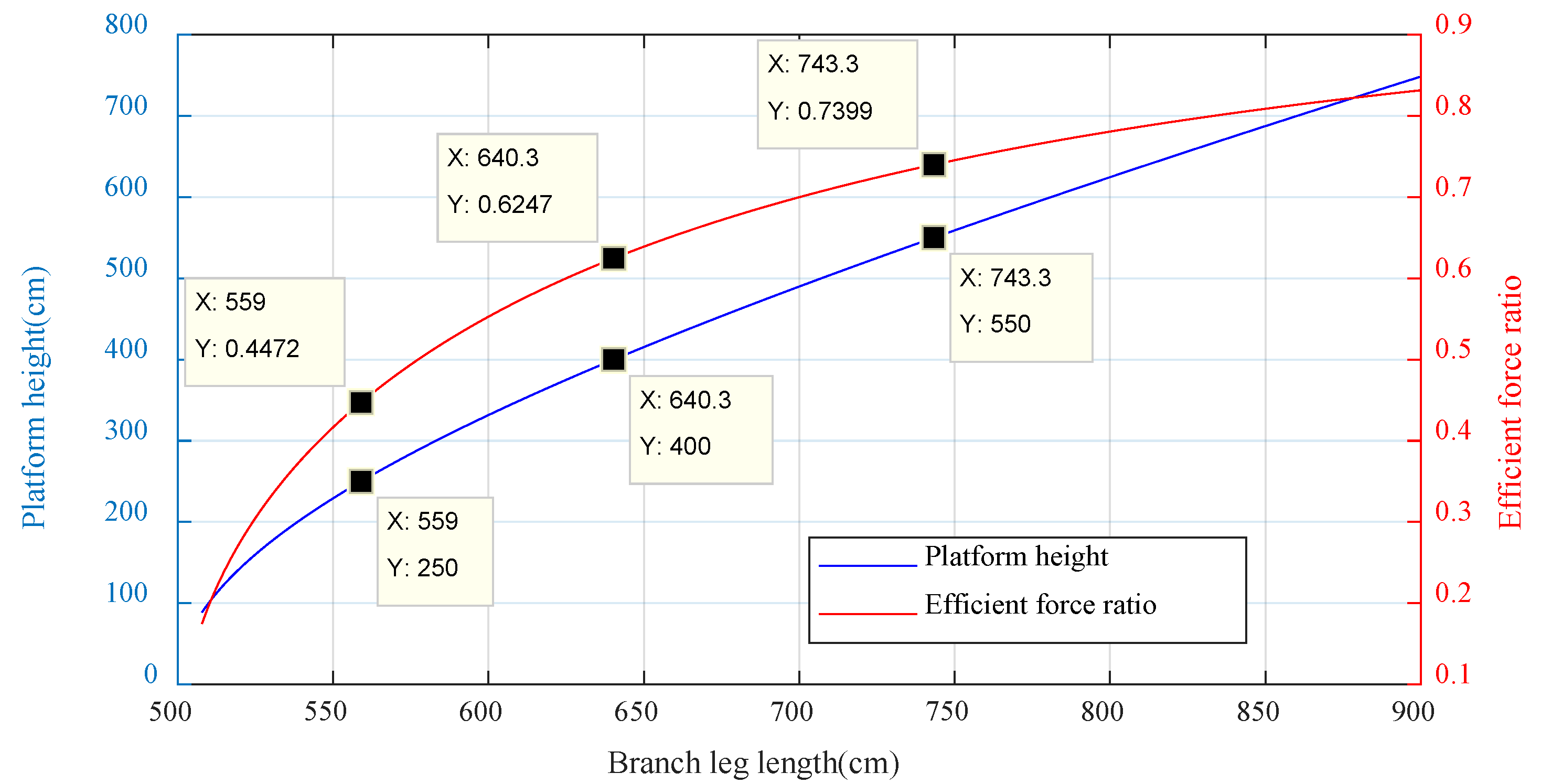
5.1. Working Height and Side Length Optimization
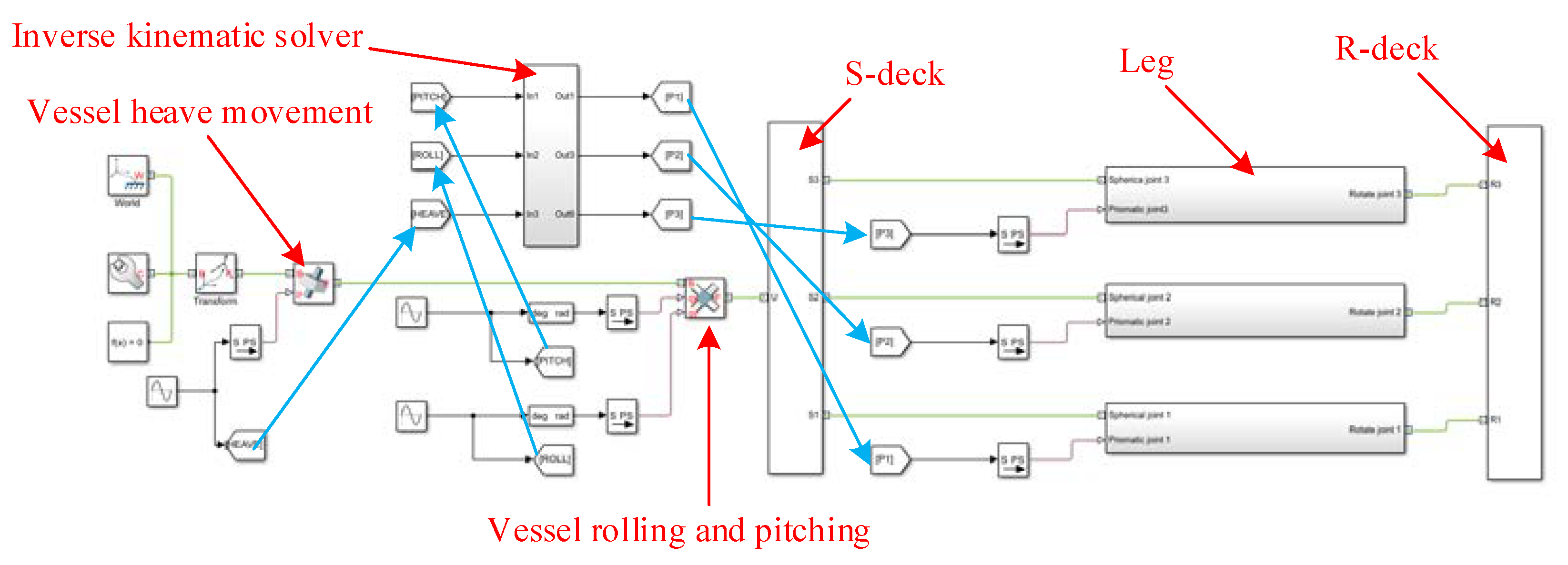
5.2. Compensation Movement Simulation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Han, C. Design and Research of Active Heave Compensation System Based on Laser Ranging Sensor. World J. Eng. Technol. 2020, 8, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Zhao, X. Position Analysis of A 3-Spr Parallel Mechanism. J. Theor. Appl. Inf. Technol. 2013, 48, 8. [Google Scholar]
- Wei, L.; Limin, T.; Zhengnan, J. Design and control of cable-drive parallel robot with 6-dof active wave compensation. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; pp. 129–133. [Google Scholar]
- Gu, Y.-F.; Xie, R.; She, J.-G. Optimization design of heave compensation device platform under six level of sea condition. Ship Sci. Technol. 2017, 39, 141–145. [Google Scholar]
- Markus Richter, E.A.; Klaus, S.; Johannes, K. Oliver Sawodny Model Predictive Trajectory Planning with Fallback-Strategy for an Active Heave Compensation System. In Proceedings of the 2014 American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014. [Google Scholar]
- Zhang, Y.; Ma, S.; Duan, W. Linear time-domain strip method for ship motion prediction. Chin. J. Ship Res. 2018, 13, 1–6, 28. [Google Scholar]
- Su, C.; Zheng, W.; Zeng, Y.; Ding, D. An Active Wave Compensation Method for the Gangway of Wind Turbine Maintenance Vessel. Naval Archit. Ocean Eng. 2017, 33, 22–25. [Google Scholar]
- Ngongi, W.; Du, J.; Massami, E.; Chang, W.-J.; Kassembe, E. Dynamic positioning of ships based on robust fuzzy observer. J. Eng. 2020, 2020, 228–238. [Google Scholar] [CrossRef]
- Wang, W. Kinematics Analysis of Wave Motion Compensation Stable Platform. Shipbuild. Technol. Res. 2019, 4. [Google Scholar] [CrossRef]
- Sun, Z.; Zhao, Q.; Wang, N.; Qin, Y. Modeling and Control of 3—RPS Parallel Vibration Isolation Platform. For. Eng. 2020, 36, 69–76. [Google Scholar]
- Nayak, A.; Wenger, P.; Caro, S. Comparison of 3-RPS and 3-SPR parallel manipulators based on their maximum inscribed sigularity-free. New Trends Mech. Mach. Sci. 2018, 121–130. [Google Scholar]
- Tang, G.; Hu, C.; Hu, X. Modeling and simulation of three-degree-of-freedom parallel wave compensation platform. J. Shanghai Marit. Univ. 2020, 41, 20–26. [Google Scholar]
- Zhou, B.; Mao, T.; Yang, R. Workspace Analysis of 3- dof RPS Parallel Mechanism. J. Hunan Univ. Nat. Sci. 2003, 58–61. [Google Scholar]
- Hongmei, Y. The Kinematics Analysis of 3-RPS Parallel Machine Tool; Northeastern University: Liao Ning Province, China, 2013. [Google Scholar]
- Lu, Y.; Zhao, Y. Position and workspace analyses of 3-SPR and 3-RPS parallel manipulators. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, CA, USA, 24–28 September 2005; pp. 957–962. [Google Scholar]
- Zhang, F.; Jia, Y.; Zhang, C.; Liang, K. Research on Design and Simulation of 3-RPS Parallel Stable Platform. Mach. Build. Autom. 2018, 47, 145–148. [Google Scholar] [CrossRef]
- Zhang, L.-J.; Guo, F.; Liu, S.-Y. Deflection capacity analysis of moving platform of a 3-RPS parallel mechanism. J. Yanshan Univ. 2012, 36, 196–200. [Google Scholar]
- Nayak, A.; Stigger, T.; Husty, M.L.; Wenger, P.; Caro, S. Operation mode analysis of 3-RPS parallel manipulators based on their design parameters. Comput. Aided Geom. Des. 2018, 63, 122–134. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Hao, Q.; Xu, G.; Lu, Y. Analysis about the Relationship Between Platform Size and Workspace of a Plane Symmetry 3-SPR Parallel Manipulator. Mach. Des. Manuf. 2012, 37–39. [Google Scholar]
- Rad, C.; Stan, S.; Bălan, R.; Lapusan, C. Forward kinematics and workspace analysis of a 3-RPS medical parallel robot. In Proceedings of the 2010 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010; pp. 1–6. [Google Scholar]
- Shi, Y.L.Y. Analysis about workspace of 3-SPR parallel manipulator influenced by the joints’distribution. J. Yanshan Univ. 2008, 304–310. [Google Scholar]
- Hu, B.; Jing, Y.L.; Yu, S.Z. Analyses of inverse kinematic, statics and workspace of a novel3RPS-3SPR Serial-Parallel manipulator. Open Mech. Eng. J. 2011. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heave | Rolling | Pitching | |
|---|---|---|---|
| Amplitude | 1500 mm | 15 degree | 5 degree |
| Frequency (rad/s) | 0.5 | 1 | 0.5 |
| Phase (rad) | 0 | 0 | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, Y.; Tian, H.; Xu, J.; Wu, S.; Fu, J. A Novel Three-SPR Parallel Platform for Vessel Wave Compensation. J. Mar. Sci. Eng. 2020, 8, 1013. https://doi.org/10.3390/jmse8121013
Zhan Y, Tian H, Xu J, Wu S, Fu J. A Novel Three-SPR Parallel Platform for Vessel Wave Compensation. Journal of Marine Science and Engineering. 2020; 8(12):1013. https://doi.org/10.3390/jmse8121013
Chicago/Turabian StyleZhan, Yong, Huichun Tian, Jianan Xu, Shaofei Wu, and Junsheng Fu. 2020. "A Novel Three-SPR Parallel Platform for Vessel Wave Compensation" Journal of Marine Science and Engineering 8, no. 12: 1013. https://doi.org/10.3390/jmse8121013