A Fast Algorithm for the Prediction of Ship-Bank Interaction in Shallow Water

 , ,
, ,
Abstract
:1. Introduction
2. Problem Statement and Method of Solution
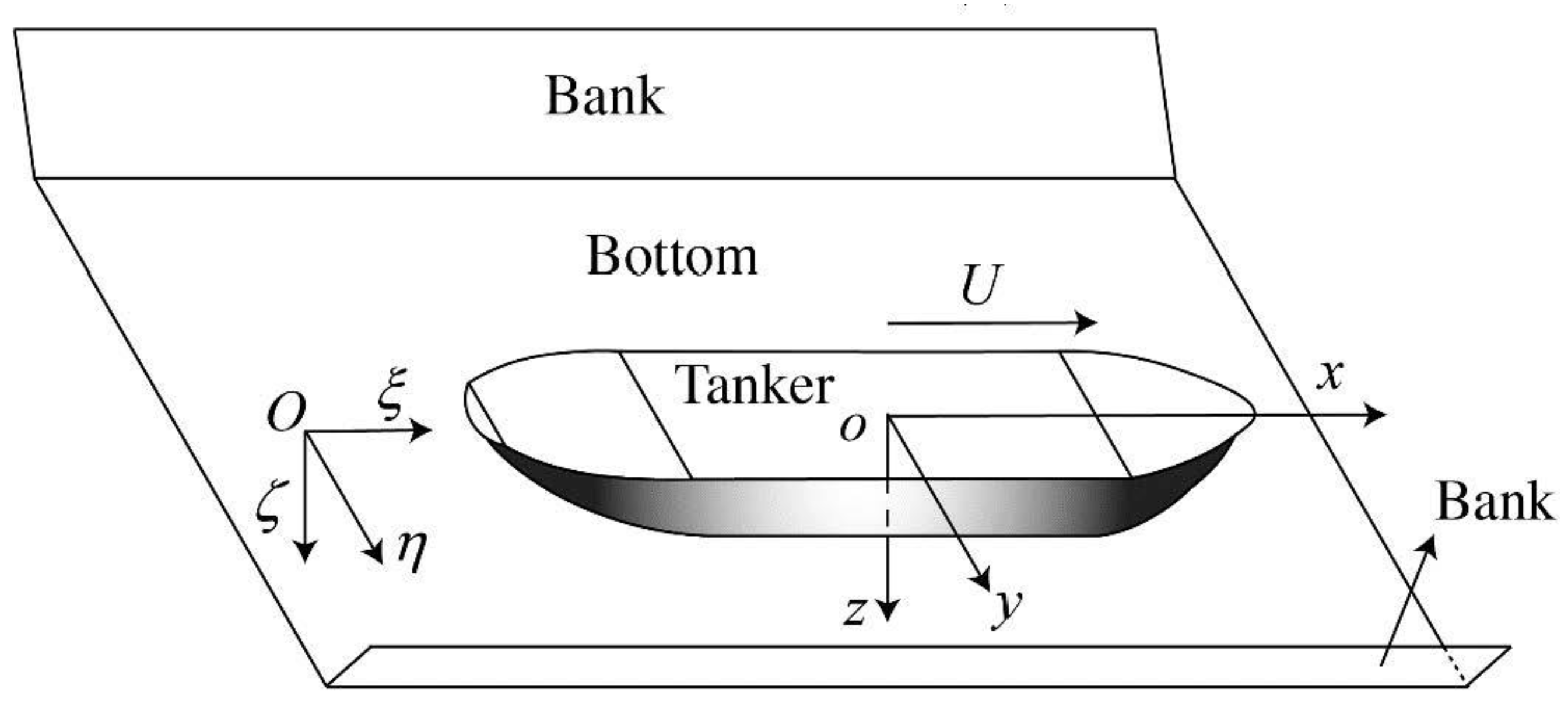
2.1. Coordinate Systems Definition and Transformation
2.2. Underlying Theory
2.3. Determination of Sinkage and Trim
- (1)
- Initialize the parameters, including advance , transfer , velocity U, iteration number n, flotation, etc.
- (2)
- Obtain the vertical force Z and pitch moment M based on the numerical solution mentioned in Section 2.2.
- (3)
- Calculate the variation of draft and trim , and then update the flotation.
- (4)
- If both and hold, then go to Step 5; if not, n = n + 1, and turn to Step 2.
- (5)
- The sinkage and trim are finally determined.
3. Ship Model, Canals and Test Conditions
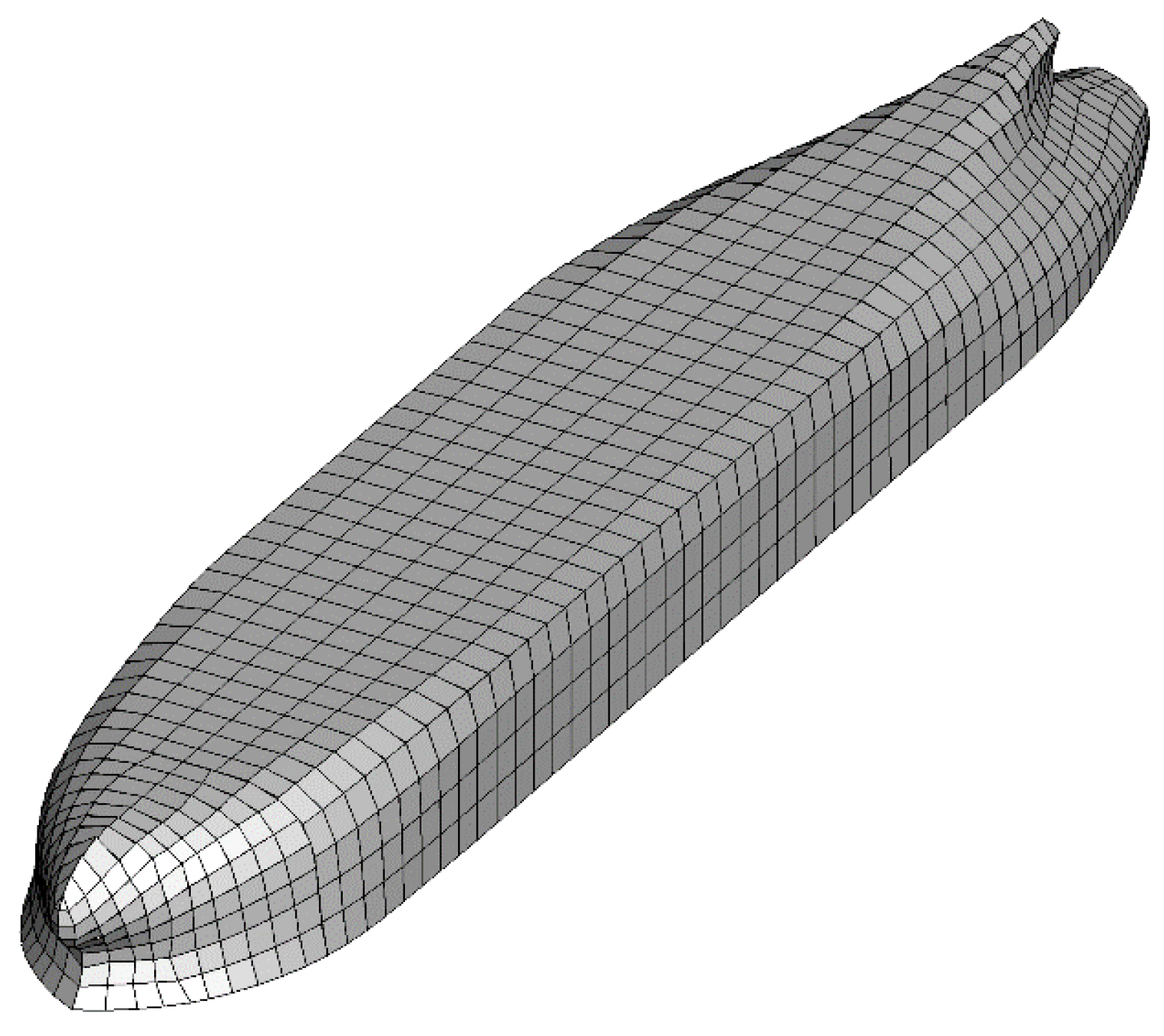
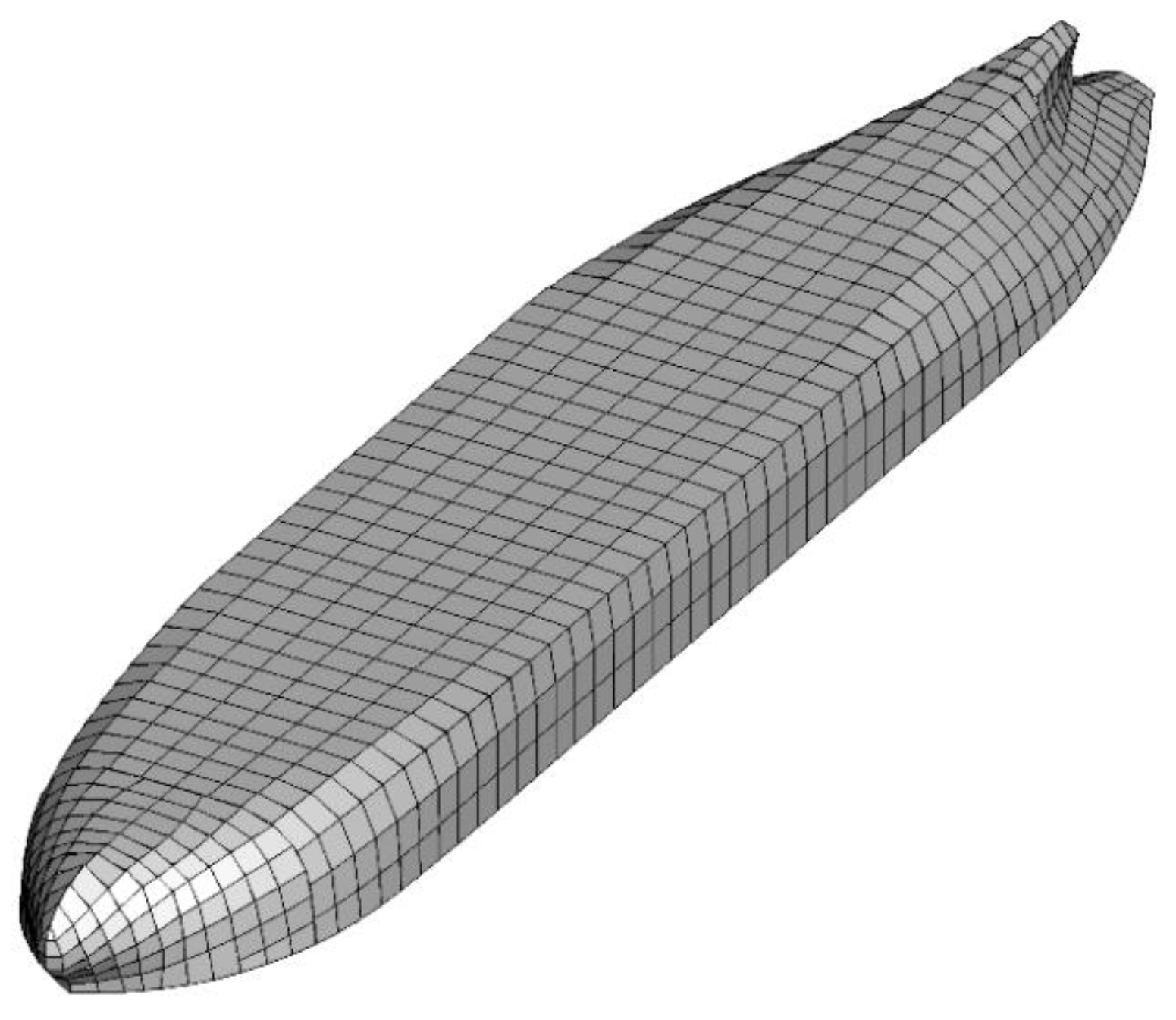
3.1. Ship Model
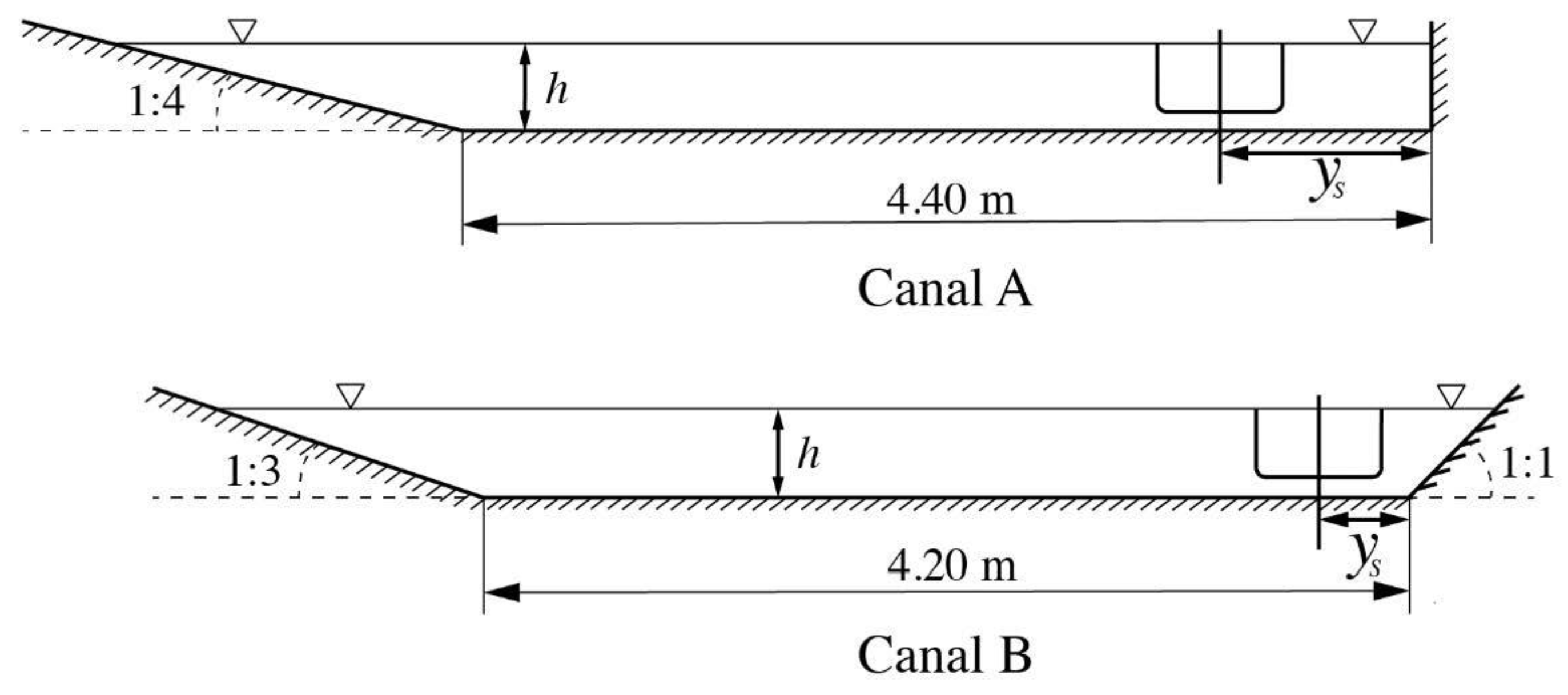
3.2. The Canals
3.3. Test Conditions
4. Comparison and Analysis
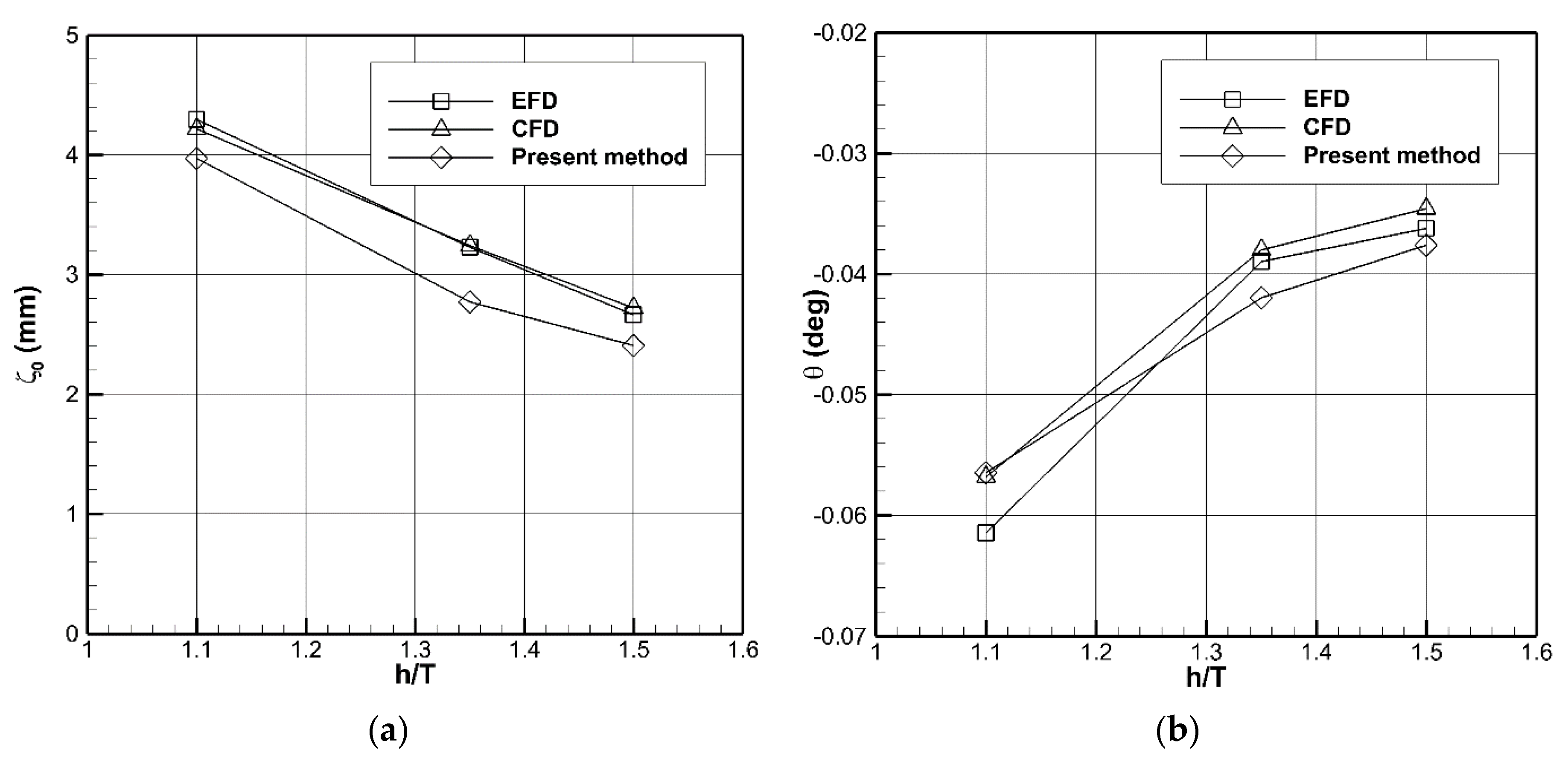
4.1. Sinkage and Trim in Canal A
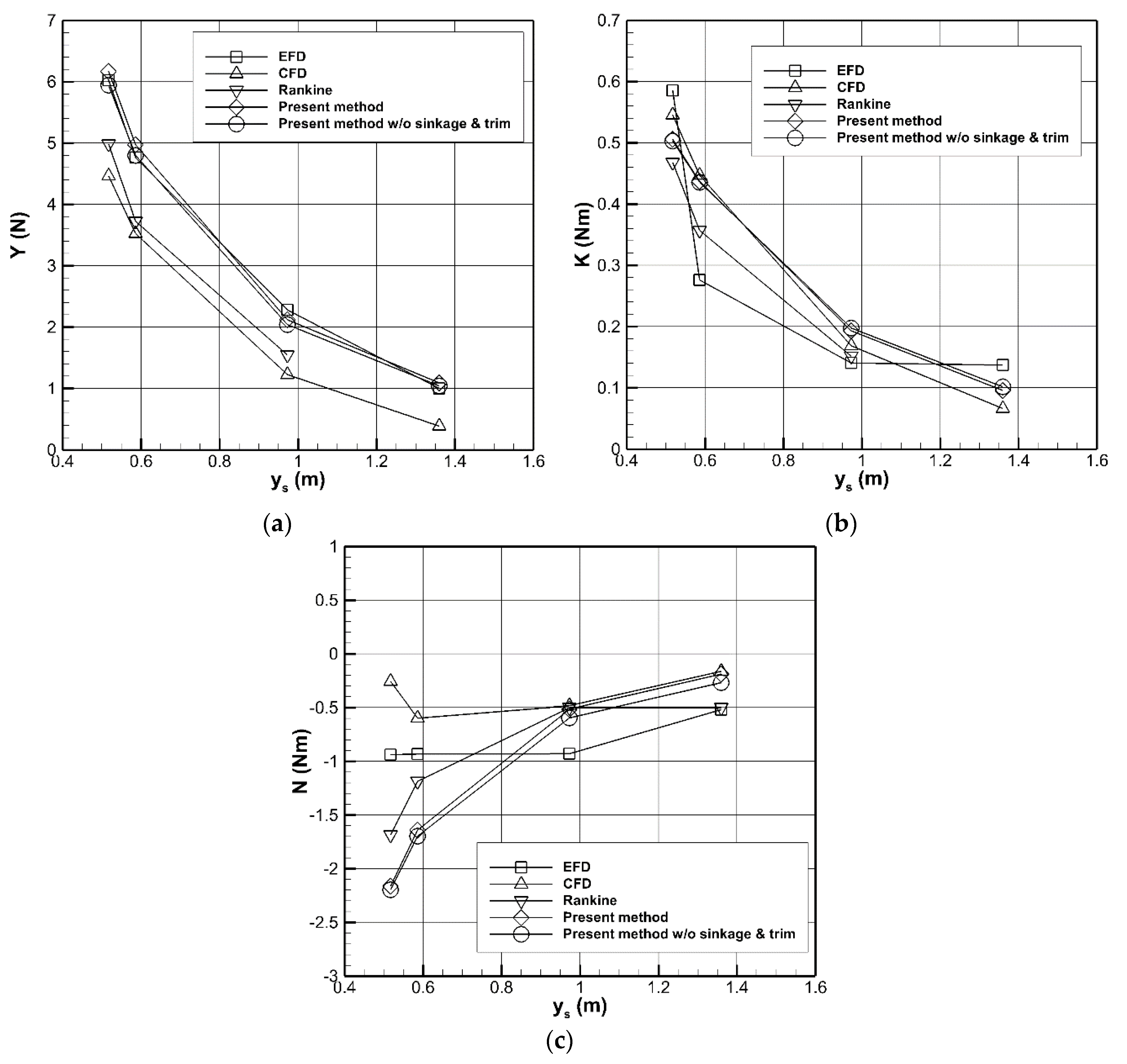
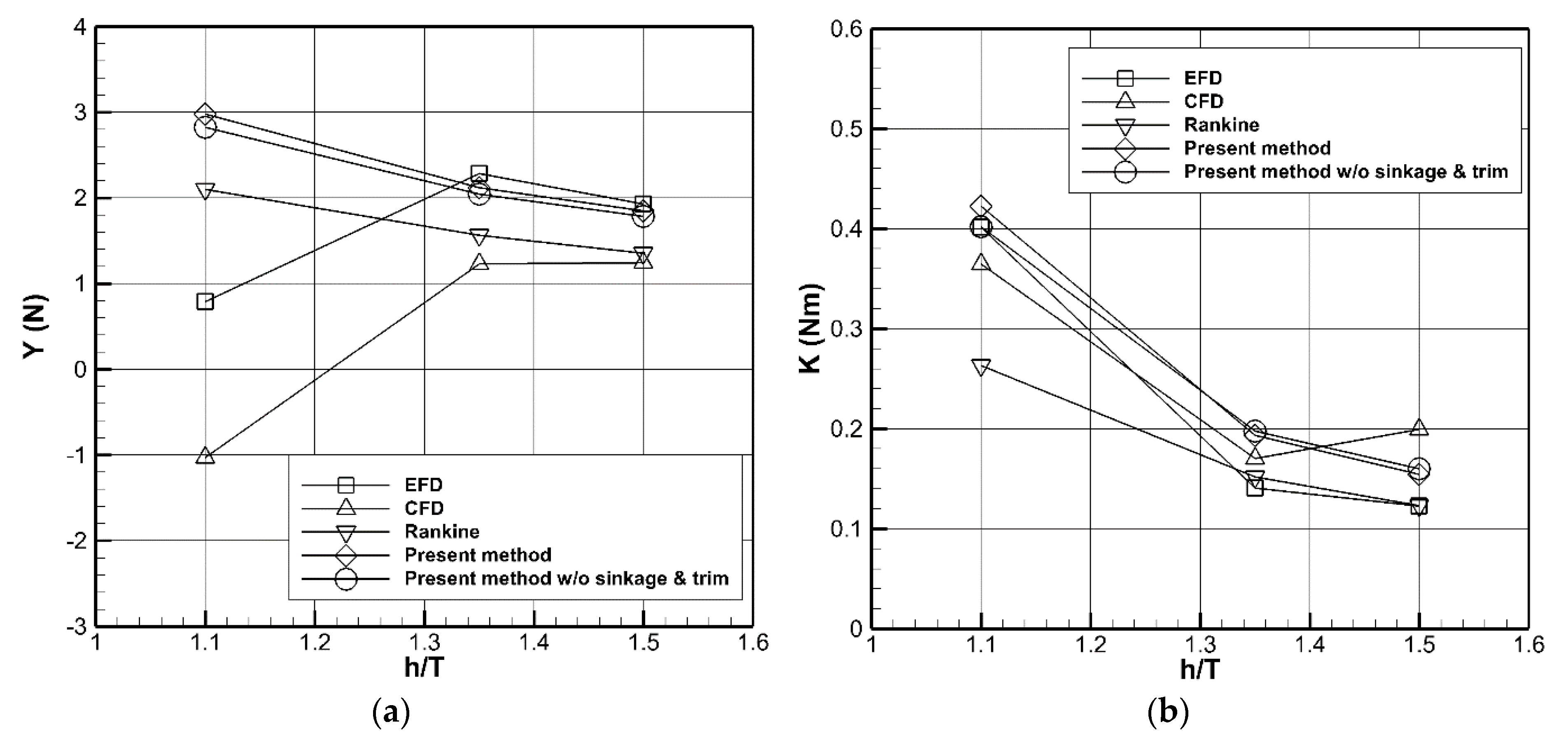
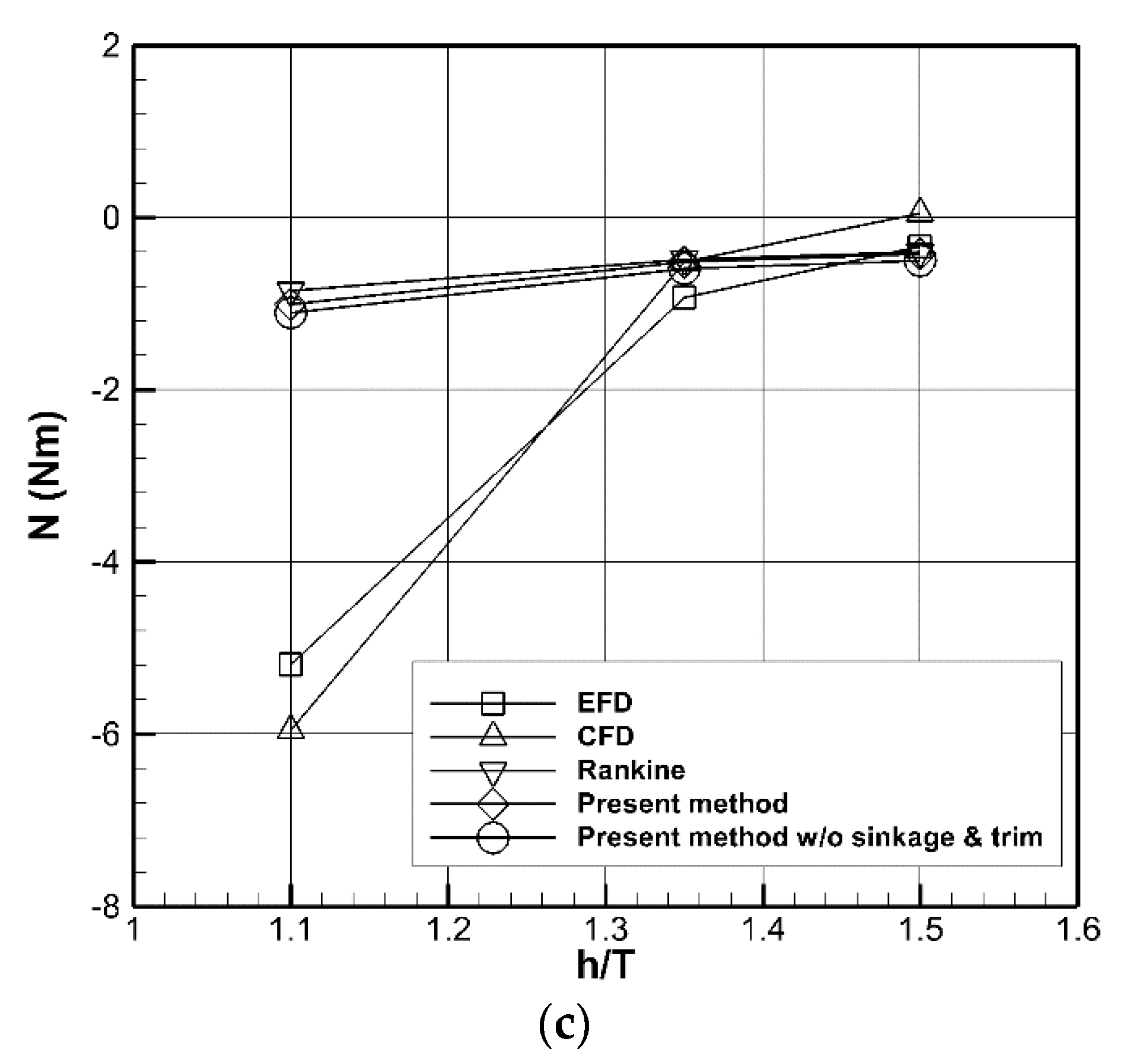
4.2. Hydrodynamic Forces and Moments in Canal A
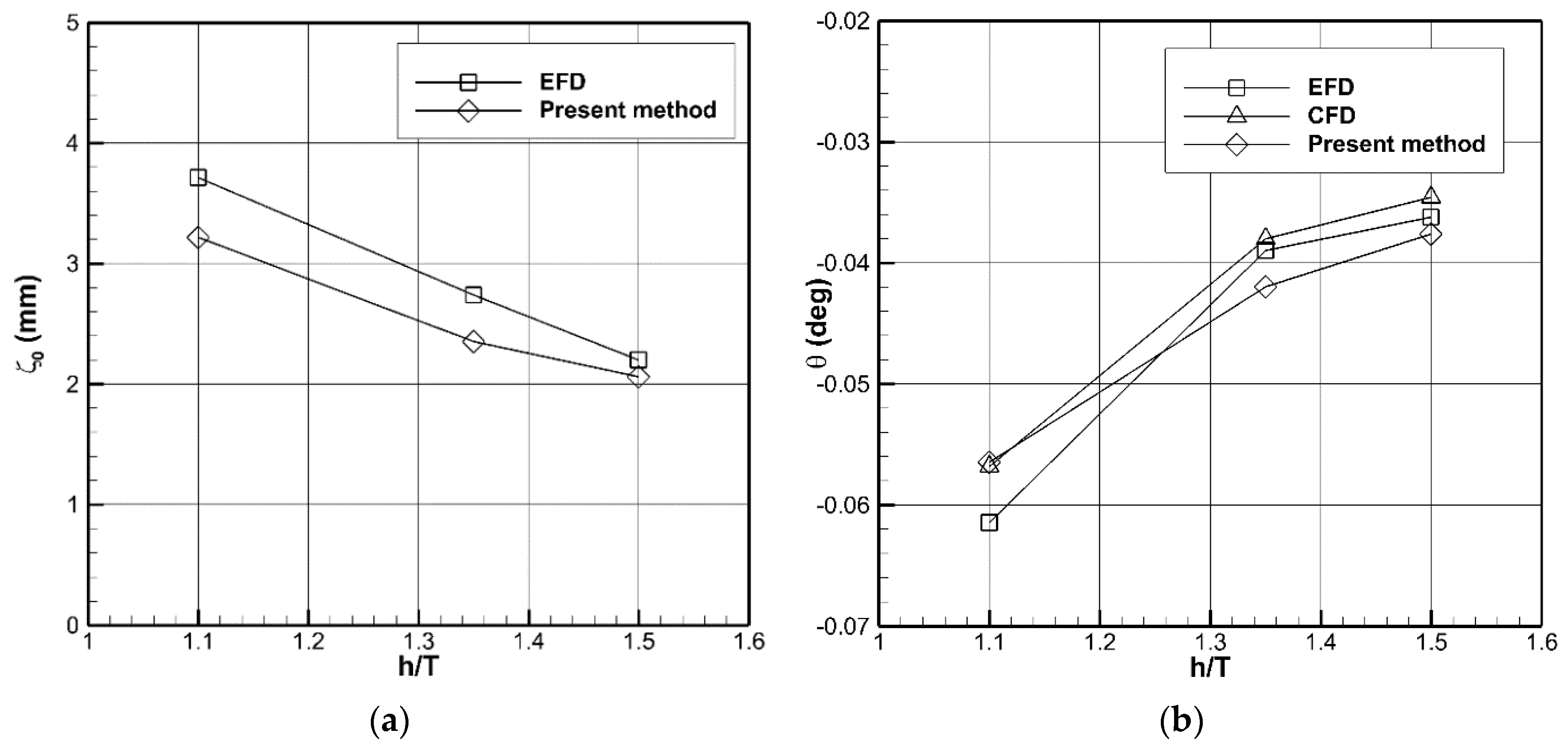
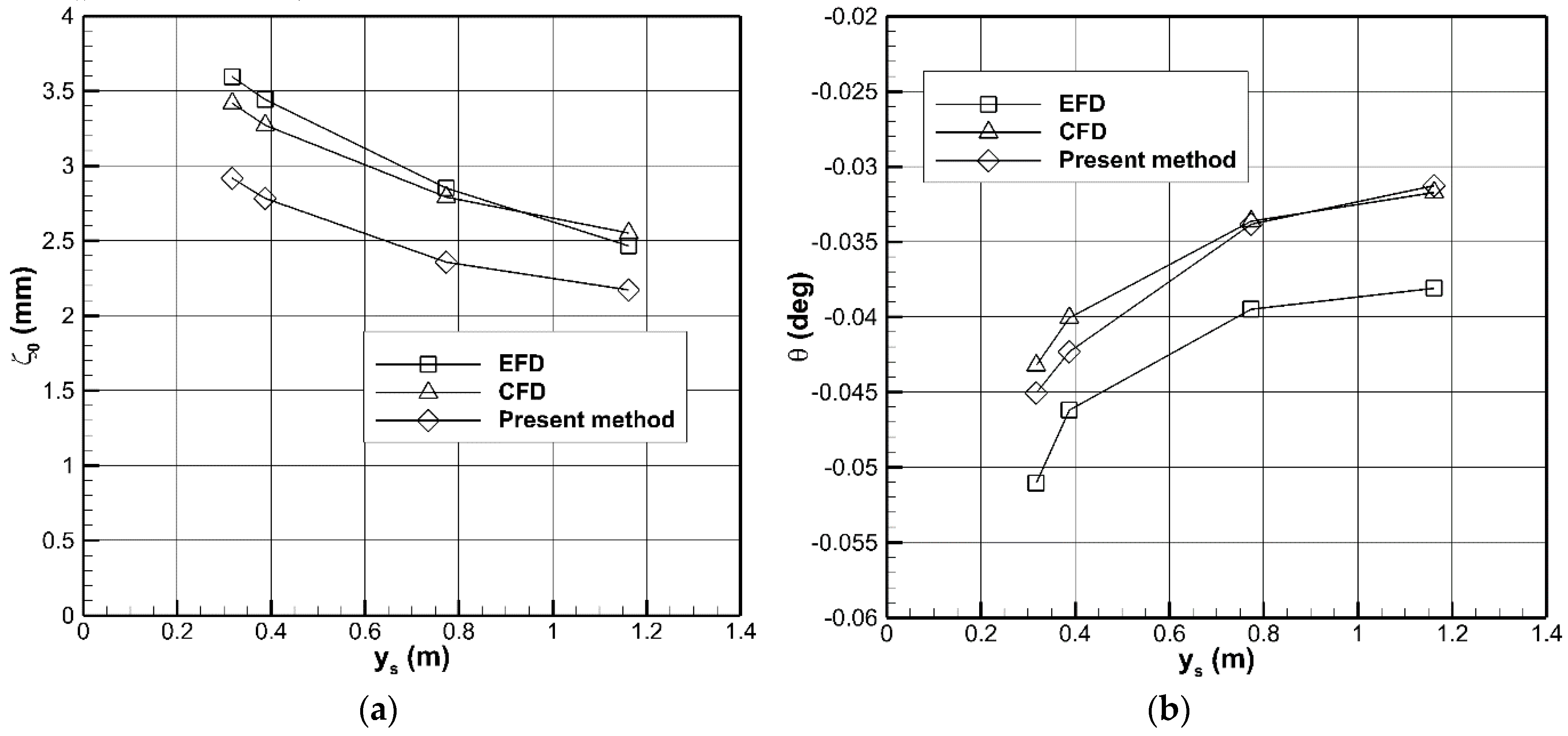
4.3. Sinkage and Trim in Canal B
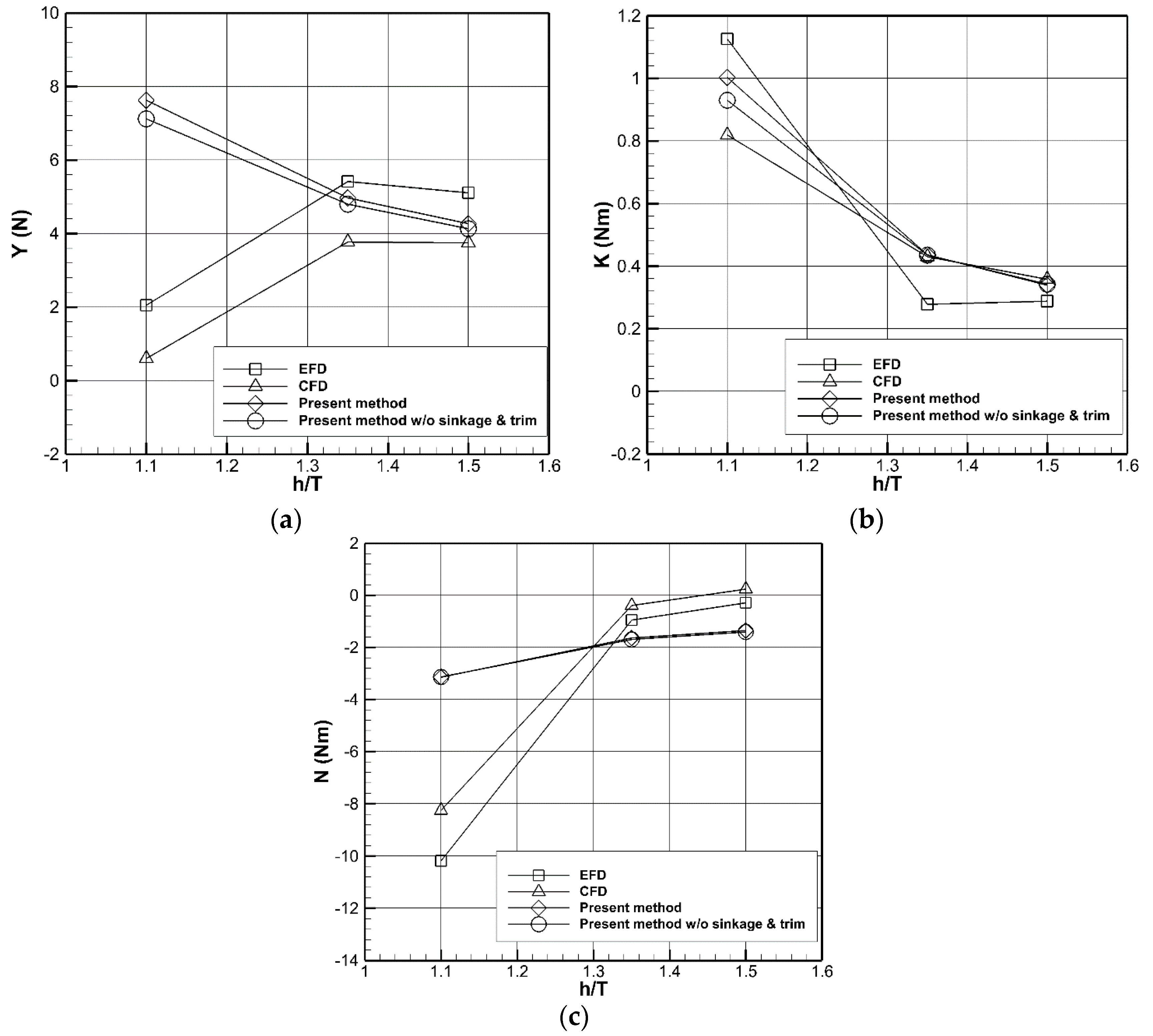
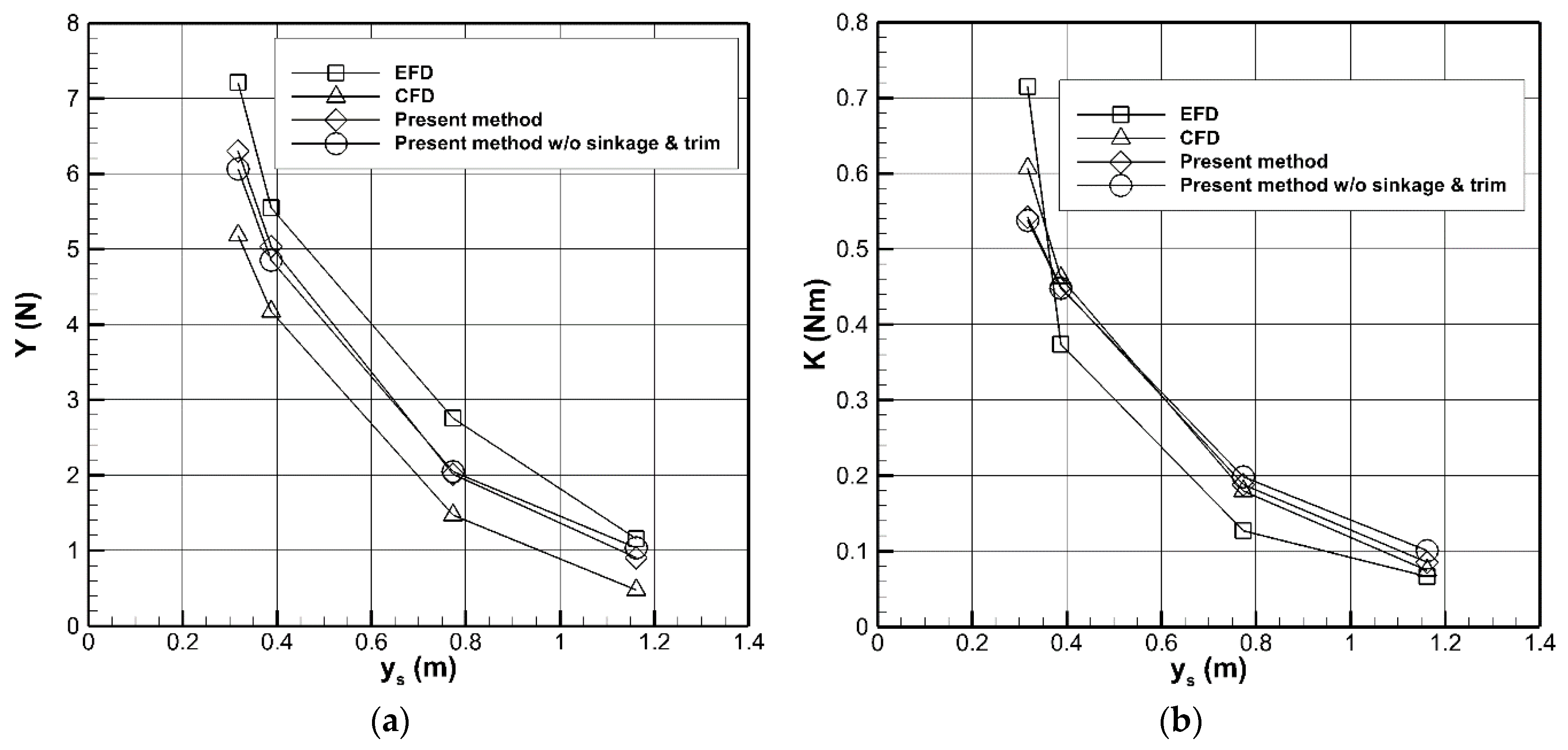
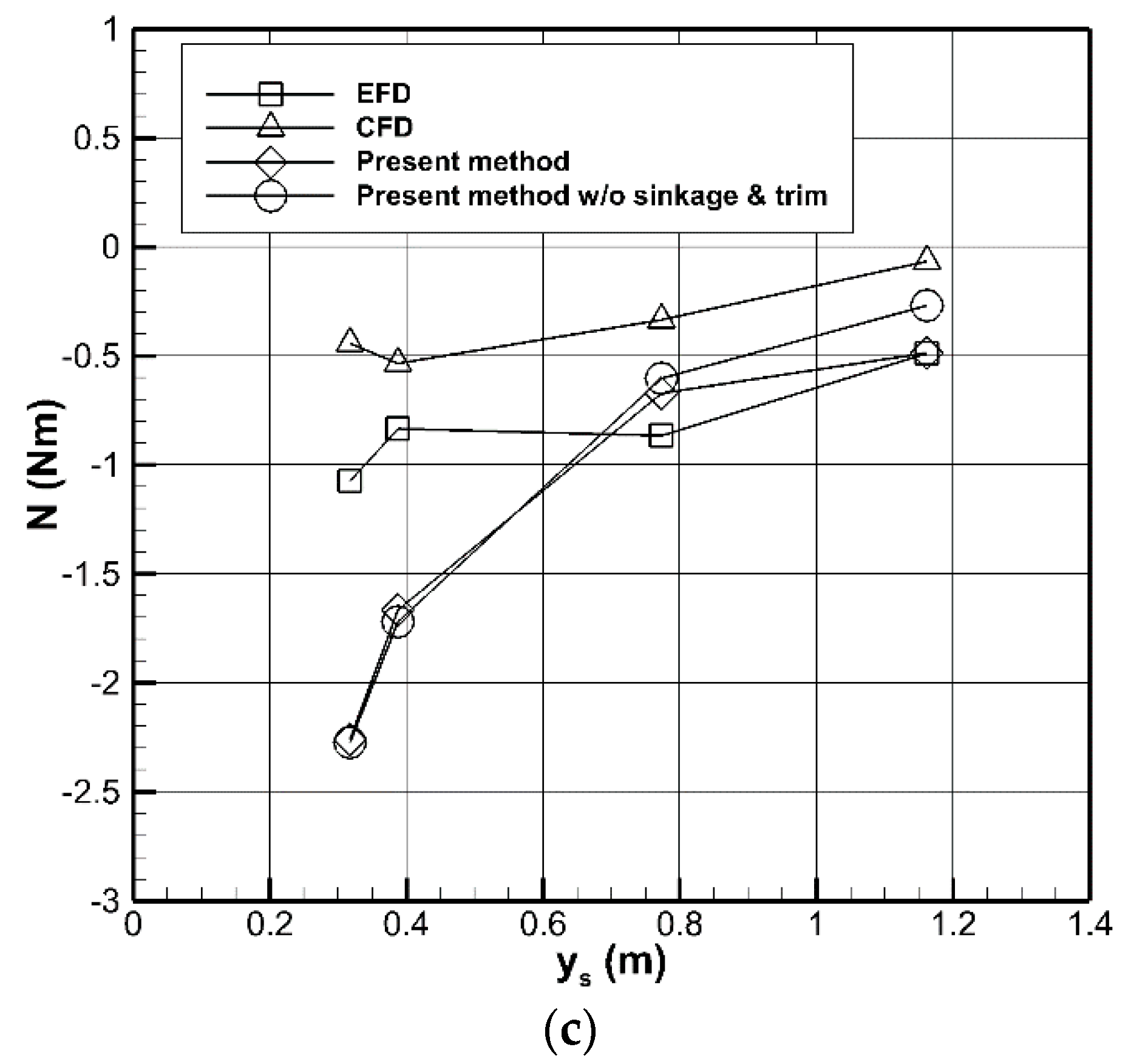
4.4. Hydrodynamic Forces and Moments in Canal B
5. Conclusions
- In the case of a vertical bank, the sinkage and trim due to the ship-bank hydrodynamic interaction can be estimated by the present method with satisfactory accuracy. For the sloped bank, the present method is less accurate, but still fairly acceptable for online simulations.
- In general, the accuracy of the present method is sufficient for estimating the hydrodynamic interaction forces on ships in moderate shallow water cases. Improvement in accuracy by accounting for the sinkage and the trim can be seen in some cases, in general, and are not substantial which agrees with the estimates obtained by Lima et al. [29] on the basis of an empiric model. For extreme shallow water cases, i.e., h/T = 1.1, the prediction for the sway force and the yaw moment is poor, but such situations should be avoided in good seamanship practice.
- In general, the accuracy provided by the present panel method is comparable to that reached by much more complex and slow RANSE-based CFD code and by the free-surface Rankine source method. A possible explanation is that this is due to the lucky error cancellation phenomenon.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, H.; Ma, N.; Gu, X.-C. Maneuverability-based approach for ship-bank collision probability under strong wind and ship-bank interaction. J. Waterw. Port Coast. Ocean Eng. 2020, 146, 04020032. [Google Scholar] [CrossRef]
- Liu, H.; Ma, N.; Gu, X.-C. Ship-bank interaction of a VLCC ship model and related course-keeping control. Ships Offshore Struc. 2017, 12, S305–S316. [Google Scholar] [CrossRef]
- Yasukawa, H. Maneuvering hydrodynamic derivatives and course stability of a ship close to a bank. Ocean. Eng. 2019, 188, 106149. [Google Scholar] [CrossRef]
- Tran, V.L.; Im, N. A study on ship automatic berthing with assistance of auxiliary devices. Int. J. Nav. Arch. Ocean Eng. 2012, 4, 199–210. [Google Scholar] [CrossRef] [Green Version]
- Mizuno, N.; Kuboshima, R. Implementation and evaluation of non-linear optimal feedback control for ship’s automatic berthing by recurrent neural network. IFAC PapersOnLine 2019, 52, 91–96. [Google Scholar] [CrossRef]
- Zou, L.; Larsson, L. Computational fluid dynamics (CFD) prediction of bank effects including verification and validation. J. Mar. Sci. Technol. 2013, 18, 310–323. [Google Scholar] [CrossRef]
- Xu, H.-F.; Zou, Z.-J.; Wu, S.-W.; Liu, X.-Y.; Zou, L. Bank effects on ship-ship hydrodynamic interaction in shallow water based on high-order panel method. Ships Offshore Struc. 2017, 12, 843–861. [Google Scholar] [CrossRef]
- Van Hoydonck, W.; Toxopeus, S.; Eloot, K.; Bhawsinka, K.; Queutey, P.; Visonneau, M. Bank effects for KVLCC2. J. Mar. Sci. Technol. 2019, 24, 174–199. [Google Scholar] [CrossRef] [Green Version]
- Norrbin, N.H. Bank effects on a ship moving through a short dredged channel. In Proceedings of the 10th Symposium On Naval Hydrodynamics, Hydrodynamics For Safety, Fundamental Hydrodynamics, Cambridge, MA, USA, 24–28 June 1974; Cooper, R.D., Doroff, S.W., Eds.; U.S. Government Printing Office: Washington, DC, USA, 1974; pp. 71–88. [Google Scholar]
- Lataire, E.; Delefortrie, G. Navigation in confined waters: Influence of bank characteristics on ship-bank interaction. In Proceedings of the 2nd International Conference on Marine Research and Transportation, Ischia & Naples, Italy, 28–30 June 2007. [Google Scholar]
- Lataire, E.; Vantorre, M.; Eloot, K. Systematic model tests on ship-bank interaction. In Proceedings of the International Conference on Ship Manoeuvring in Shallow and Confined Water: Bank Effects, Antwerp, Belgium, 13–15 May 2009. [Google Scholar]
- Lataire, E.; Vantorre, M.; Delefortrie, G. The influence of the ship’s speed and distance to an arbitrarly shaped bank on bank effects. J. Offshore Mech. Arct. 2017, 140, 021304. [Google Scholar] [CrossRef] [Green Version]
- Sutulo, S.; Guedes Soares, C. Simulation of the hydrodynamic interaction forces in close-proximity manoeuvring. In Proceedings of the 27th International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Estoril, Portugal, 15–19 June 2008; pp. 839–848. [Google Scholar]
- Beck, R.F. Forces and moments on a ship moving in a shallow channel. J. Ship Res. 1977, 21, 107–119. [Google Scholar]
- Kijima, K. Prediction method for ship manoeuvring motion in the proximity of a pier. Ship Tech. Res. 1997, 44, 22–31. [Google Scholar]
- Ma, S.-J.; Zhou, M.-G.; Zou, Z.-J. Hydrodynamic interaction among hull, rudder and bank for a ship sailing along a bank in restricted waters. J. Hydrodyn. Ser. B 2013, 25, 809–817. [Google Scholar] [CrossRef]
- Kaidi, D.; Smaoui, H.; Sergent, P. Numerical estimation of ship-propeller-hull interaction effect on ship manoeuvring using CFD method. J. Hydrodyn. Ser. B 2017, 29, 154–167. [Google Scholar] [CrossRef]
- Yuan, Z.-M. Ship hydrodynamics in confined waterways. J. Ship Res. 2019, 63, 16–29. [Google Scholar] [CrossRef] [Green Version]
- Hess, J.L.; Smith, A.M.O. Calculation of non-lifting potential flow about arbitrary three-dimensional bodies. J. Ship Res. 1964, 8, 22–44. [Google Scholar]
- Sutulo, S.; Guedes Soares, C.; Otzen, J.F. Validation of potential-flow estimation of interaction forces acting upon ship hulls in parallel motion. J. Ship Res. 2012, 56, 129–145. [Google Scholar] [CrossRef]
- Zhou, X.-Q.; Sutulo, S.; Guedes Soares, C. Computation of ship-to-ship interaction forces by a 3D potential flow panel method in finite water depth. J. Offshore Mech. Arct. 2010, 136, 285–294. [Google Scholar]
- Yuan, Z.-M.; Li, L.; Yeung, R. Free-surface effects on interaction of multiple ships moving at different speeds. J. Ship Res. 2019, 63, 251–267. [Google Scholar] [CrossRef]
- Fonfach, J.M.A.; Sutulo, S.; Guedes Soares, C. Numerical study of ship-to-ship interaction forces on the basis of various flow models. In Proceedings of the 2nd International Conference on Ship Manoeuvring in Shallow and Confined Water: Ship to Ship Interaction, Trondheim, Norway, 18–20 May 2011; pp. 137–146. [Google Scholar]
- Wnęk, A.D.; Sutulo, S.; Guedes Soares, C. CFD analysis of ship-to-ship hydrodynamic interaction. J. Mar. Sci. Tech. 2018, 17, 21–37. [Google Scholar] [CrossRef]
- Lataire, E.; Vantorre, M.; Delefortrie, G. A prediction method for squat in restricted and unrestricted rectangular fairways. Ocean Eng. 2012, 55, 71–80. [Google Scholar] [CrossRef]
- Kok, Z.; Duffy, J.; Chai, S.-H.; Jin, Y.-T.; Javanmardi, M. Numerical investigation of scale effect in self-propelled container ship squat. Appl. Ocean Res. 2020, 99, 102143. [Google Scholar] [CrossRef]
- McTaggart, K. Ship squat prediction using a potential flow rankine source method. Ocean Eng. 2018, 148, 234–246. [Google Scholar] [CrossRef]
- Liu, Y.; Zou, L.; Zou, Z.-J. Computational fluid dynamics prediction of hydrodynamic forces on a manoeuvring ship including effects of dynamic sinkage and trim. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2017, 12, 334–353. [Google Scholar] [CrossRef]
- Lima, D.B.V.; Sutulo, S.; Guedes Soares, C. Study of ship-to-ship interaction in shallow water with account for squat phenomenon. In Maritime Technology and Engineering 3; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2016; pp. 333–338. [Google Scholar]
- Ren, H.-L.; Xu, C.; Zhou, X.-Q.; Sutulo, S.; Guedes Soares, C. A numerical method for calculation of ship-ship hydrodynamics interaction in shallow water accounting for sinkage and trim. J. Offshore Mech. Arct. 2020, 142, 051201. [Google Scholar] [CrossRef]
- Lamb, H. Hydrodynamics, 6th ed.; Dover Pub: New York, NY, USA, 1945. [Google Scholar]
- Japan P&I Club. Preventing damage to harbour facilities and ship handling in Harbours, Part2. P&I Loss Prev. Bull. 2014, 32, 4–7. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Full Scale | Model Scale |
|---|---|---|
| Length () (m) | 320.0 | 4.2667 |
| Breath () (m) | 58.0 | 0.7733 |
| Draft at midship () (m) | 20.8 | 0.2776 |
| Longitudinal CoG () (m) | 10.87 | 0.1449 |
| Vertical CoG () (m) | 20.8 | 0.2776 |
| Longitudinal CoF () (m) | −2.67 | −0.0356 |
| Waterplane area () (m2) | 16,706.25 | 2.9700 |
| Displacement () (m3) | 312,622 | 0.7410 |
| Longitudinal metacentric height () (m) | 398.55 | 5.3140 |
| Block coefficient () | 0.8098 | 0.8098 |
| h (h/T) | Frh | ys | |||
|---|---|---|---|---|---|
| 0.5175 m | 0.5866 m | 0.9731 m | 1.3594 m | ||
| 0.4160 m (1.50) | 0.1763 | Case 7 | Case 4 | ||
| 0.3744 m (1.35) | 0.1859 | Case 1 | Case 2 | Case 3 | Case 6 |
| 0.3051 m (1.10) | 0.2059 | Case 8 | Case 5 | ||
| h (h/T) | Frh | ys | |||
|---|---|---|---|---|---|
| 0.3170 m | 0.3872 m | 0.7735 m | 1.1613 m | ||
| 0.3744 m (1.35) | 0.1859 | Case 9 | Case 10 | Case 11 | Case 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Xu, C.; Xin, P.; Zhou, X.; Sutulo, S.; Guedes Soares, C. A Fast Algorithm for the Prediction of Ship-Bank Interaction in Shallow Water. J. Mar. Sci. Eng. 2020, 8, 927. https://doi.org/10.3390/jmse8110927
Huang J, Xu C, Xin P, Zhou X, Sutulo S, Guedes Soares C. A Fast Algorithm for the Prediction of Ship-Bank Interaction in Shallow Water. Journal of Marine Science and Engineering. 2020; 8(11):927. https://doi.org/10.3390/jmse8110927
Chicago/Turabian StyleHuang, Jin, Chen Xu, Ping Xin, Xueqian Zhou, Serge Sutulo, and Carlos Guedes Soares. 2020. "A Fast Algorithm for the Prediction of Ship-Bank Interaction in Shallow Water" Journal of Marine Science and Engineering 8, no. 11: 927. https://doi.org/10.3390/jmse8110927