Dynamic Simulation of System Performance Change by PID Automatic Control of Ocean Thermal Energy Conversion


Abstract
:1. Introduction
2. Ocean Thermal Energy Conversion Cycle
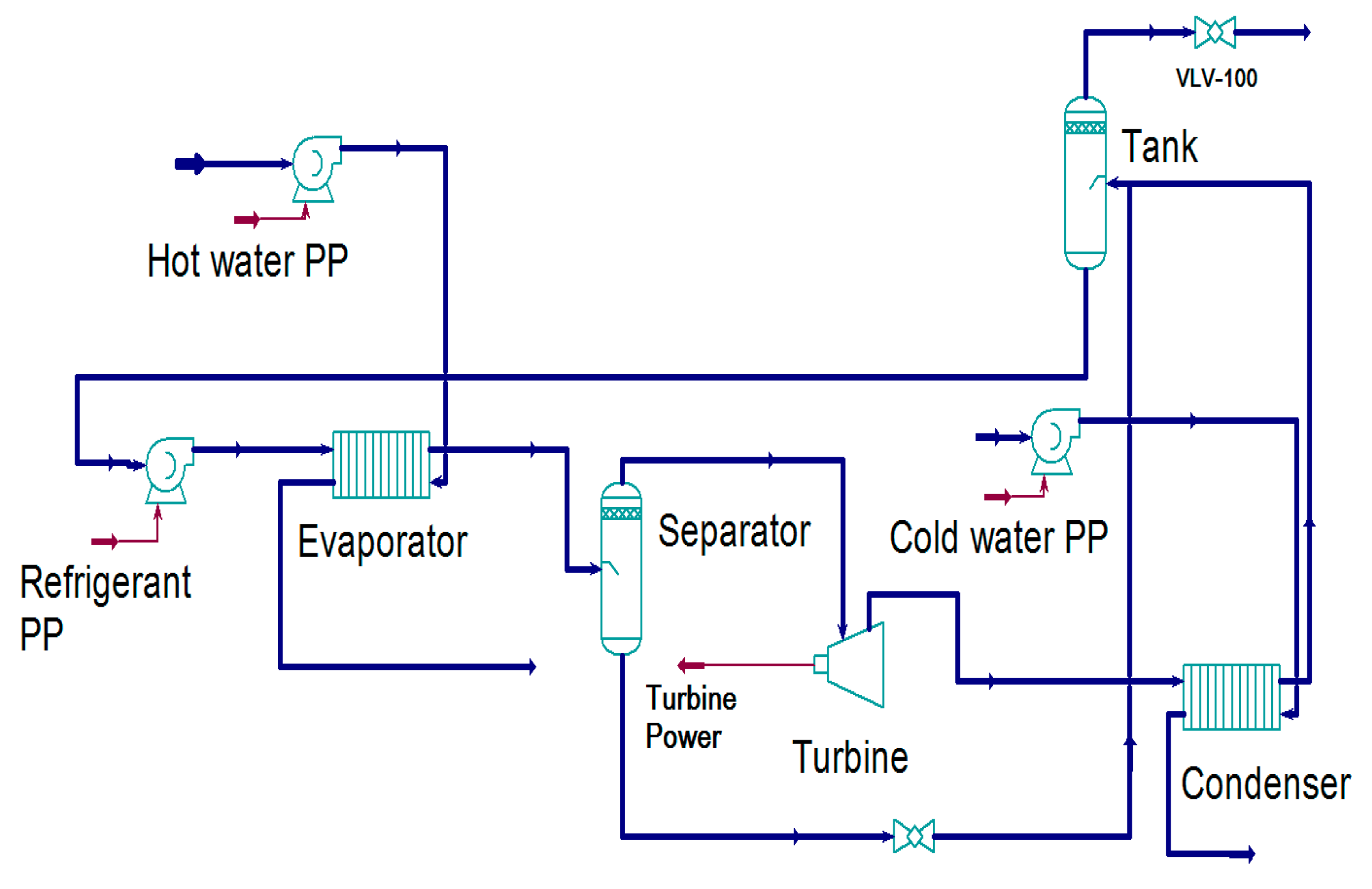
2.1. Closed-Cycle OTEC
2.2. Design of the MW OTEC Plant
2.3. Dynamic Cycle
2.3.1. Dynamic Cycle Design Theory
Materials Balance
Energy Balance
2.3.2. Dynamic Cycle Simulation
Control Range Design
PID Control Design
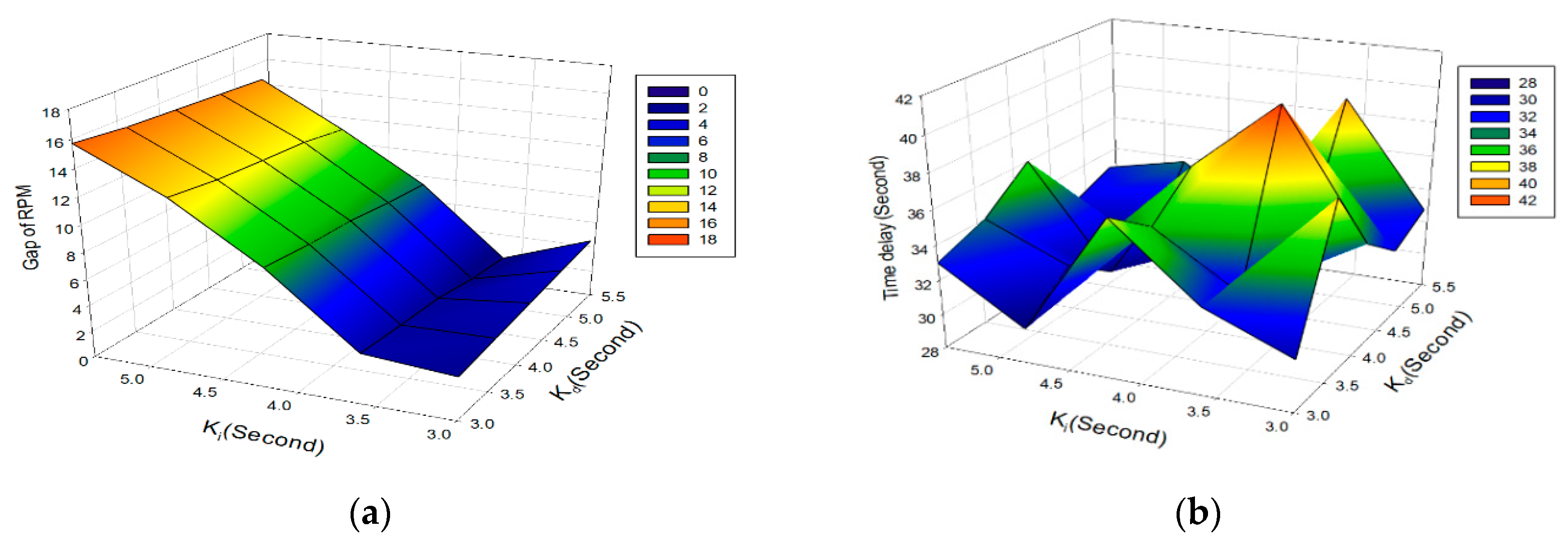
PID Control Value Selection
Dynamic Simulation of OTEC with PID Control
3. Simulation Result of OTEC
3.1. Pump Mass Flow Rate and Superheat Change with Seawater Temperature
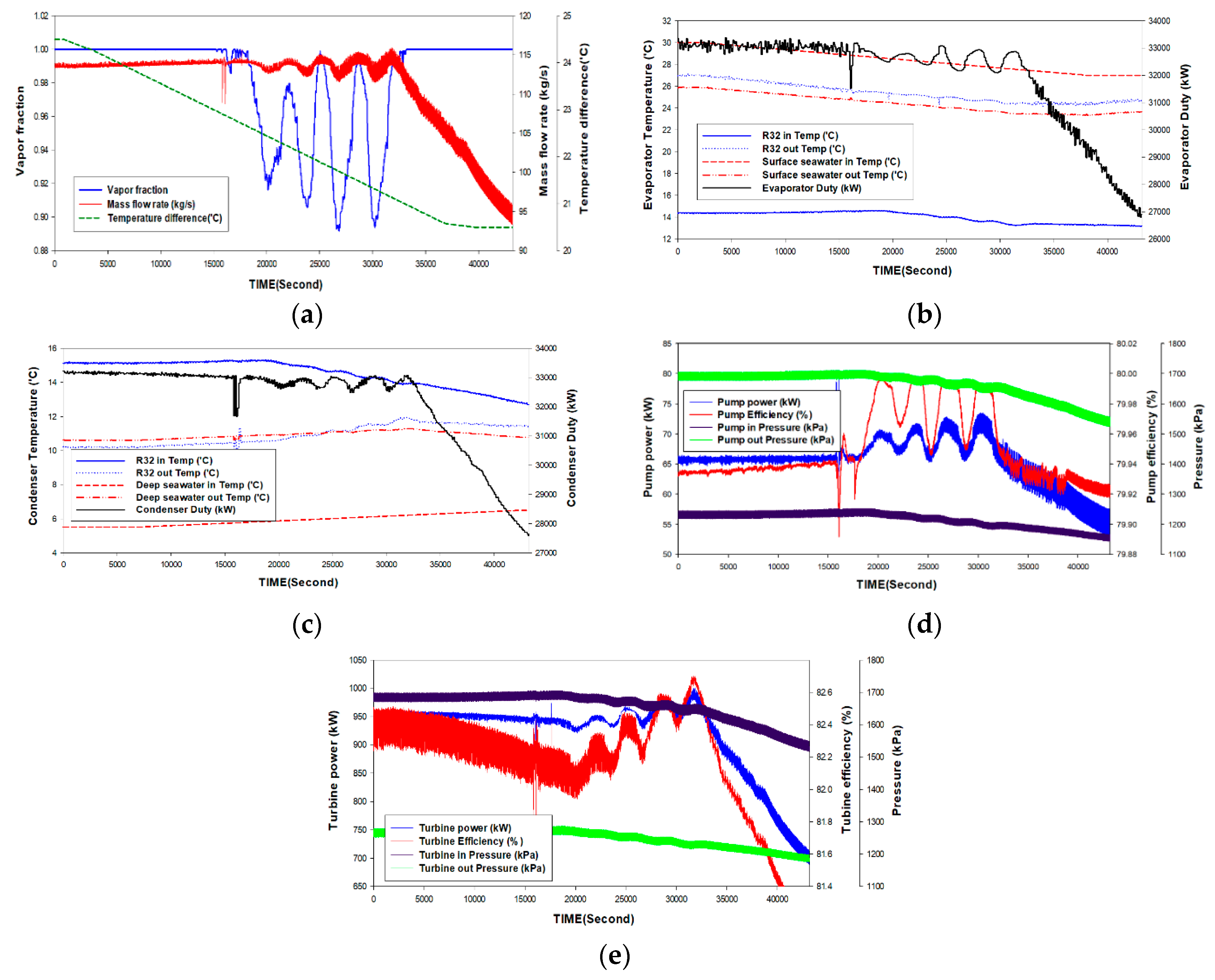
3.1.1. Without PID Controller
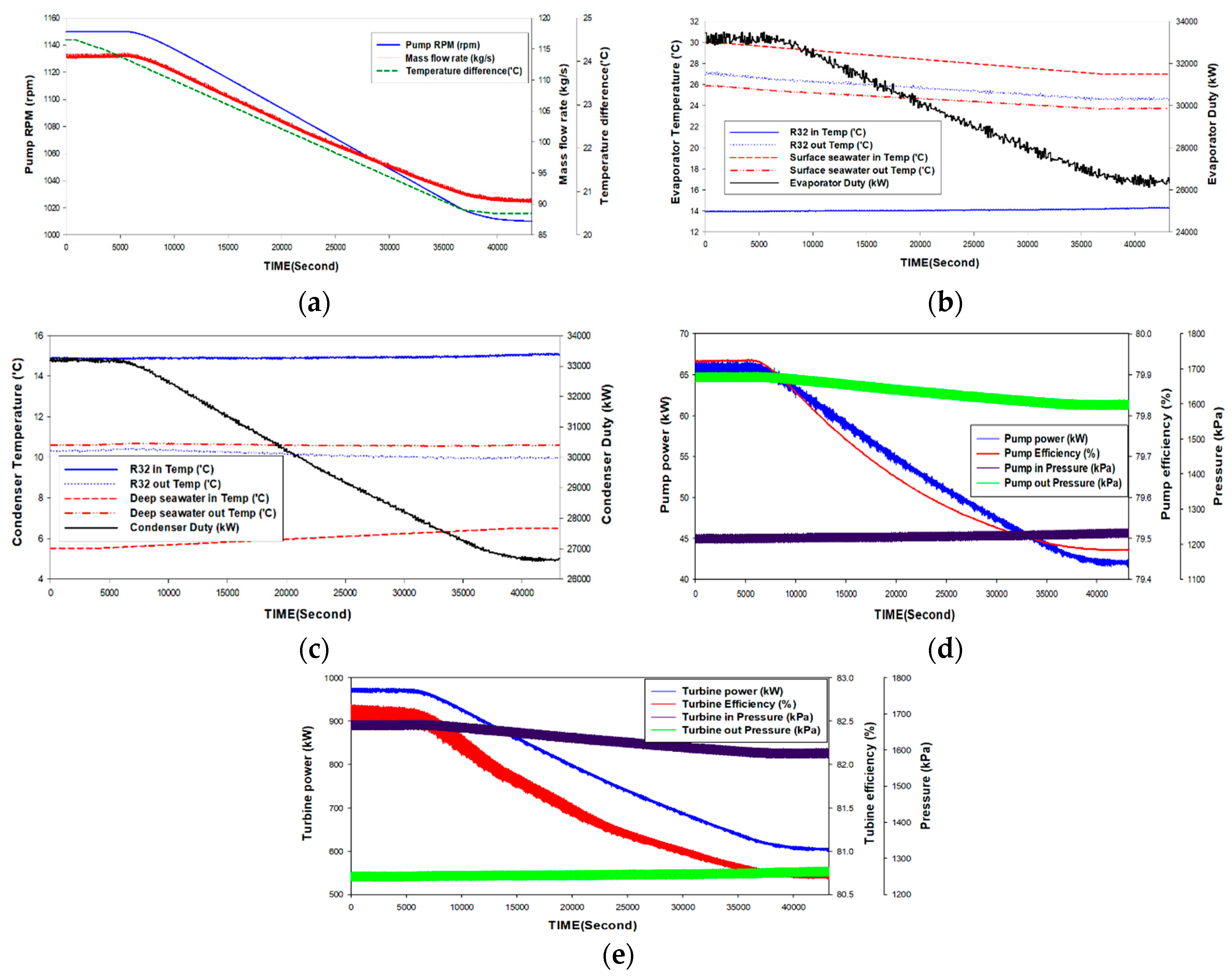
3.1.2. With PID Controller
3.2. Performance Change with Seawater Temperature of OTEC
3.2.1. Without PID Controller
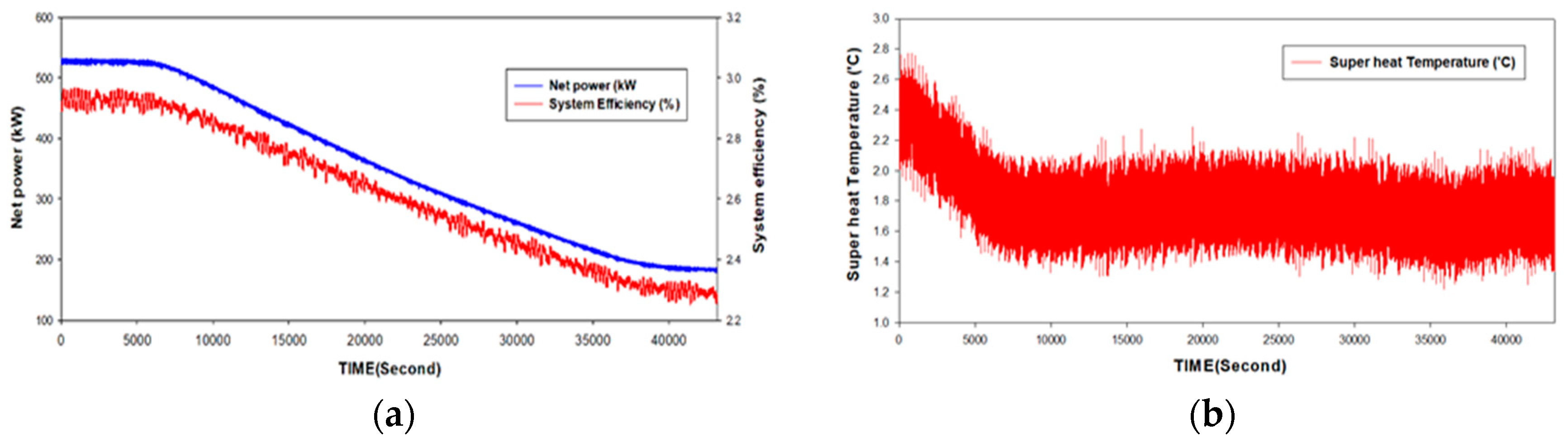
3.2.2. With PID Controller
4. Conclusions
- (1)
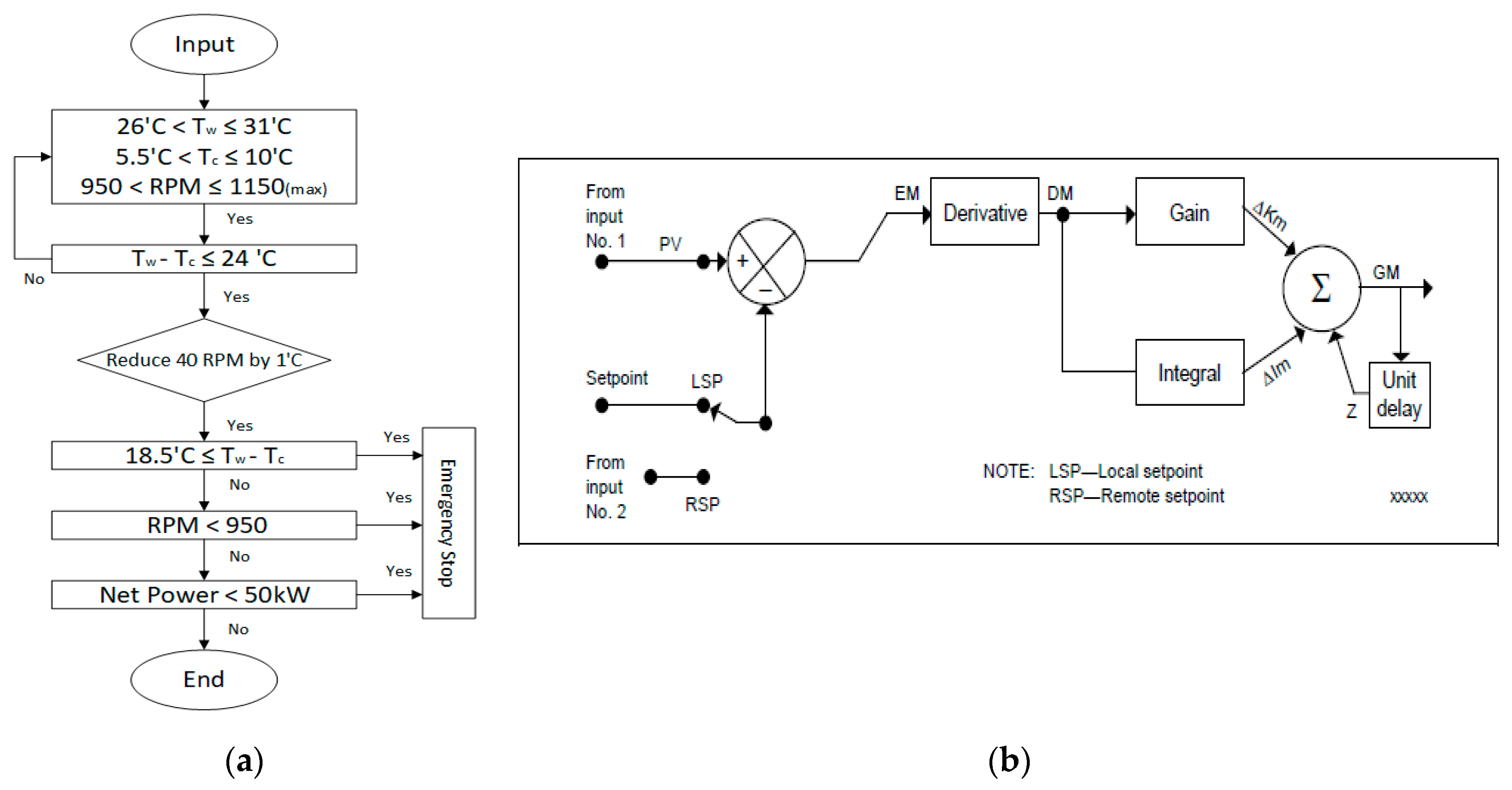
- The RPM control accuracy of the refrigerant pump and the reaction speed were compared by establishing a control system through optimal application of proportional value, integral value, and differential value. The integral value (Ki) of 3.6 s and the differential value (Kd) of 4.8 s were applied to derive system safety by applying the control system of seawater temperature differential power generation with a 33 s response speed and 2.73 RPM accuracy.
- (2)
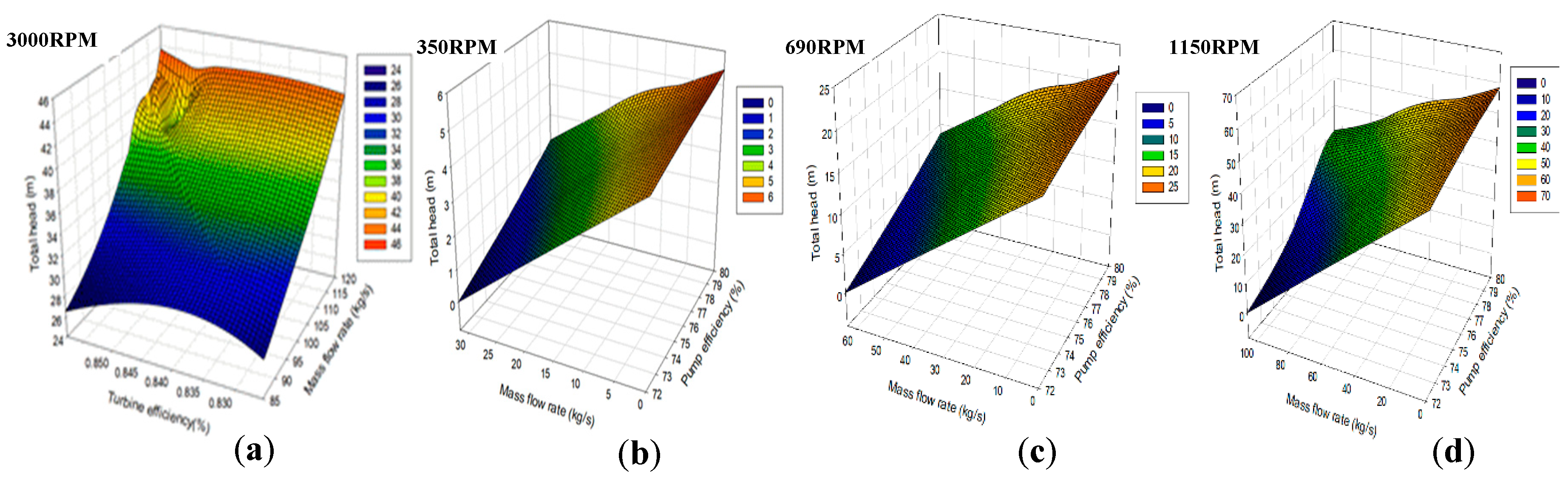
- Xylem’s working fluid pump applies the efficiency and head change for each flow rate at an RPM of 350, 690 and 1150 and configures the system to control the RPM according to the change in the seawater temperature during plant operation. It was maintained at 1 °C or higher to confirm system stabilization. When the temperature difference between the surface water and the deep water decreased, the average superheat degree (2.3 °C) decreased as time changed. The OTEC system operated while maintaining an average superheat degree of 1.7 °C from approximately 6000 s after falling below 24 °C.
- (3)
- The control algorithm was selected according to the operating characteristics of the pump and turbine to design and control the OTEC plant. By evaluating the responsiveness and accuracy according to the control value and finally evaluating the driving stability through dynamic modeling, it is possible to minimize the control error and unstable operation that can occur in the actual plant.
Author Contributions
Funding
Conflicts of Interest
References
- EIA. International Energy Outlook 2016; EIA: Washington, DC, USA, 2016.
- Khaligh, A.; Onar, O.C. Energy Harvesting, Solar, Wind, and Ocean Energy Conversion System; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Binger, A. Potential and Future Prospects for Ocean Thermal Energy Conversion (OTEC) in small Islands Developing States (SIDS); Saga University Institute of Ocean Energy: Saga, Japan, 2004. [Google Scholar]
- Kempener, R.; Neumann, F. Ocean Thermal Energy Conversion Technology Brief; IRENA Ocean Energy Technology Brief 1 (IRENA): Bonn, Germany, 2014. [Google Scholar]
- Vega, L.A. Ocean Thermal Energy Conversion. In Encyclopedia of Sustainability Science and Technology; Springer: Berlin/Heidelberg, Germany, 2012; pp. 7296–7328. [Google Scholar]
- Meyer, L.; Cooper, D.; Varley, R. Are We There Yet? OCEANS’11 MTS/IEEE KONA: Waikoloa, HI, USA, 2011; pp. 1–6.
- YoMatsuda, S.; Goto, S.; Sugi, T.; Morisaki, T.; Yasunaga, T.; Ikegami, Y. Control of OTEC Plant Using Double-stage Rankine Cycle Considering Warm Seawater Temperature Varia. IFAC PapersOnLine 2017, 50, 135–140. [Google Scholar] [CrossRef]
- Goto, S.; Matsuda, Y.; Sugi, T.; Morisaki, T.; Yasunaga, T.; Ikegami, Y.; Egas, N. Web Application for OTEC Simulator Using Double-stage Rankine Cycle. IFAC PapersOnLine 2017, 50, 121–128. [Google Scholar] [CrossRef]
- Nakamura, M.; Egashira, N.; Uehara, H. Digital Control of Working Fluid Flow Rate for an OTEC Plant. J. Sol. Energy Eng. 1986, 108, 111–116. [Google Scholar] [CrossRef]
- Matsuda, Y.; Urayoshi, D.; Goto, S.; Sugi, T.; Morisaki, T.; Yasunaga, T.; Ikegami, Y. Construction of OTEC Potential Model Based on Cycle Analysis. Inst. Syst. Control Inf. Eng. (ISCIE) 2017, 30, 297–304. [Google Scholar]
- Song, Y.U. A study of OTEC application on deep-sea FPSOs. J. Mar. Sci. Technol. 2018, 24, 1–13. [Google Scholar] [CrossRef]
- Navani, J.P.; Sapra, S. Non-Conventional Energy Resources (For UPTU & UTU), 1st ed.; S. Chand & Company Pvt. Ltd.: Delhi, India, 2013. [Google Scholar]
- Oh, J.T.; Hihara, E. Condensation Heat Transfer for Pure HFC Refrigerants and a Ternary Refrigerants Mixture Inside a Horizontal Tube. Korean Soc. Mech. Eng. 2000, 24, 233–240. [Google Scholar]
- Yoon, J.-I.; Ye, B.-H.; Kim, J.H.; Kim, H.-J.; Lee, H.-S.; Son, C.-H. Performance analysis of 20 kW OTEC power cycle using various working fluids. J. Korean Soc. Mar. Eng. 2013, 37, 836–842. [Google Scholar] [CrossRef]
- Aspen HYSYS. Dynamic Modeling Guide; Aspen Technology Inc.: Bedford, MA, USA, 2011. [Google Scholar]
- Tillner-Roth, R.; Yokozeki, A. An international standard equation of state for difluoromethane (R-32) for temperatures from the triple point at 136.34 K to 435 K and pressures up to 70 MPa. J. Phys. Chem. Ref. Data 1997, 25, 1273–1328. [Google Scholar] [CrossRef] [Green Version]
- Honeywell. A Process Control Primer; Honeywell: Charlotte, NC, USA, 2000. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Conditions | |
|---|---|
| Working fluid | R32, Seawater |
| Warm water temperature | 31 °C |
| Cold water temperature | 5.5 °C |
| Warm water head loss | 5.5 m |
| Cold water head loss | 8.2 m |
| Sea water pump efficiency | 75% |
| Seawater pipe diameter | 1085.6 mm |
| Cold water pipe length | 2870 m |
| Warm water pipe length | 500 m |
| Working fluid pump efficiency | Actual data accepted |
| Turbine efficiency | Actual data accepted |
| Turbine inlet pressure | 1658.7 kPa |
| Turbine outlet pressure | 1239.1 kPa |
| Pump inlet pressure | 1174.6 kPa |
| Warm water flow rate | 1864.6 kg/s |
| Cold water flow rate | 1503.3 kg/s |
| Working fluid flow rate | 117.7 kg/s |
| Turbine inlet temperature | 28.2 °C |
| Condenser heat transfer coefficient | 2084 kJ/°C−s |
| Condenser heat transfer area | 761.6 m2 |
| Evaporator heat transfer coefficient | 1082 kJ/°C−s |
| Evaporator heat transfer area | 897.6 m2 |
| Warm Water Temperature (°C) | RPM | Evaporating Pressure (kPa) | Condensing Pressure (kPa) | Evaporating Temperature (°C) | Saturating Temperature in Evaporator (°C) | Super Heat (°C) | Condensing Temperature (°C) | Saturating Temperature in Condenser (°C) |
|---|---|---|---|---|---|---|---|---|
| 31 | 1150 | 1687 | 1237 | 28.2 | 24.9 | 3.3 | 10.47 | 13.9 |
| 30.5 | 1150 | 1685 | 1237 | 27.7 | 24.9 | 2.8 | 10.5 | 13.9 |
| 30 | 1150 | 1684 | 1236 | 27.05 | 24.9 | 2.15 | 10.5 | 13.8 |
| 29.5 | 1130 | 1665 | 1231 | 26.75 | 24.5 | 2.25 | 10.3 | 13.7 |
| 29 | 1110 | 1650 | 1225 | 26.3 | 24.1 | 2.2 | 10.1 | 13.5 |
| 28.5 | 1090 | 1630 | 1223 | 26 | 23.7 | 2.3 | 9.8 | 13.5 |
| 28 | 1070 | 1610 | 1220 | 25.6 | 23.2 | 2.4 | 9.65 | 13.4 |
| 27.5 | 1050 | 1600 | 1217 | 25.1 | 23 | 2.1 | 9.5 | 13.3 |
| 27 | 1030 | 1585 | 1213 | 24.7 | 22.6 | 2.1 | 9.25 | 13.2 |
| 26.5 | 1010 | 1570 | 1211 | 24.3 | 22.3 | 2 | 9.1 | 13.1 |
| 26 | 990 | 1550 | 1210 | 23.8 | 22 | 1.8 | 9 | 13.1 |
| Warm Water Temperature (°C) | RPM | Evaporating Pressure (kPa) | Condensing Pressure (kPa) | Evaporating Temperature (°C) | Saturating Temperature in Evaporator (°C) | Super Heat (°C) | Condensing Temperature (°C) | Saturating Temperature in Condenser (°C) |
|---|---|---|---|---|---|---|---|---|
| 31 | 1150 | 1717 | 1272 | 28.2 | 25.6 | 2.6 | 11.46 | 14.8 |
| 30.5 | 1150 | 1717 | 1271 | 27.6 | 25.6 | 2 | 11.45 | 14.8 |
| 30 | 1130 | 1698 | 1265 | 27.2 | 25.2 | 2 | 11.24 | 14.6 |
| 29.5 | 1110 | 1680 | 1262 | 26.8 | 24.8 | 2 | 11 | 14.5 |
| 29 | 1090 | 1663 | 1258 | 26.4 | 24.4 | 2 | 10.8 | 14.4 |
| 28.5 | 1070 | 1647 | 1255 | 26 | 24.1 | 1.9 | 10.6 | 14.4 |
| 28 | 1050 | 1630 | 1251 | 25.55 | 23.7 | 1.85 | 10.4 | 14.2 |
| 27.5 | 1030 | 1616 | 1247 | 25.15 | 23.4 | 1.75 | 10.24 | 14.1 |
| 27 | 1010 | 1602 | 1246 | 24.72 | 23 | 1.72 | 10.08 | 14.1 |
| 26.5 | 990 | 1588 | 1244 | 24.3 | 22.7 | 1.6 | 9.93 | 14 |
| 26 | 970 | 1575 | 1243 | 23.9 | 22.4 | 1.5 | 9.74 | 14 |
| Warm Water Temperature (°C) | RPM | Evaporating Pressure (kPa) | Condensing Pressure (kPa) | Evaporating Temperature (°C) | Saturating Temperature in Evaporator (°C) | Super Heat (°C) | Condensing Temperature (°C) | Saturating Temperature in Condenser (°C) |
|---|---|---|---|---|---|---|---|---|
| 31 | 1130 | 1735 | 1277 | 28.2 | 26 | 2.2 | 12.15 | 15 |
| 30.5 | 1110 | 1705 | 1292 | 27.29 | 25.3 | 1.99 | 11.85 | 15.4 |
| 30 | 1090 | 1685 | 1287 | 26.85 | 24.9 | 1.95 | 11.6 | 15.2 |
| 29.5 | 1070 | 1665 | 1285 | 26.45 | 24.5 | 1.95 | 11.4 | 15.2 |
| 29 | 1050 | 1652 | 1282 | 26 | 24.2 | 1.8 | 11.25 | 15.1 |
| 28.5 | 1030 | 1635 | 1280 | 25.55 | 23.8 | 1.75 | 11.05 | 15.1 |
| 28 | 1010 | 1620 | 1276 | 25.1 | 23.4 | 1.7 | 10.9 | 14.9 |
| 27.5 | 990 | 1608 | 1274 | 24.7 | 23.2 | 1.5 | 10.72 | 14.9 |
| 27 | 970 | 1595 | 1273 | 24.25 | 22.9 | 1.35 | 10.55 | 14.8 |
| 26.5 | 950 | 1582 | 1271 | 23.8 | 22.6 | 1.2 | 10.4 | 14.8 |
| Warm Water Temperature (°C) | RPM | Evaporating Pressure (kPa) | Condensing Pressure (kPa) | Evaporating Temperature (°C) | Saturating Temperature in Evaporator (°C) | Super Heat (°C) | Condensing Temperature (°C) | Saturating Temperature in Condenser (°C) |
|---|---|---|---|---|---|---|---|---|
| 31 | 1090 | 1730 | 1330 | 28.45 | 25.9 | 2.55 | 12.7 | 16.4 |
| 30.5 | 1070 | 1713 | 1325 | 27.4 | 25.5 | 1.9 | 12.6 | 16.2 |
| 30 | 1050 | 1699 | 1321 | 27 | 25.2 | 1.8 | 12.4 | 16.1 |
| 29.5 | 1030 | 1685 | 1318 | 26.55 | 24.9 | 1.65 | 12.2 | 16.1 |
| 29 | 1010 | 1668 | 1317 | 26.15 | 24.5 | 1.65 | 12.05 | 16 |
| 28.5 | 990 | 1655 | 1315 | 25.7 | 24.2 | 1.5 | 11.9 | 16 |
| 28 | 970 | 1642 | 1312 | 25.25 | 23.9 | 1.35 | 11.7 | 15.9 |
| 27.5 | 950 | 1628 | 1310 | 24.8 | 23.6 | 1.2 | 11.5 | 15.8 |
| Warm Water Temperature (°C) | RPM | Evaporating Pressure (kPa) | Condensing Pressure (kPa) | Evaporating Temperature (°C) | Saturating Temperature in Evaporator (°C) | Super Heat (°C) | Condensing Temperature (°C) | Saturating Temperature in Condenser (°C) |
|---|---|---|---|---|---|---|---|---|
| 31 | 1050 | 1735 | 1360 | 28.6 | 26 | 2.6 | 13.4 | 17.2 |
| 30.5 | 1030 | 1718 | 1355 | 27.6 | 25.6 | 2 | 13.25 | 17 |
| 30 | 1010 | 1705 | 1355 | 27.2 | 25.3 | 1.9 | 13.05 | 17 |
| 29.5 | 990 | 1690 | 1350 | 26.73 | 25 | 1.73 | 12.85 | 16.9 |
| 29 | 970 | 1677 | 1348 | 26.3 | 24.7 | 1.6 | 12.67 | 16.8 |
| 28.5 | 950 | 1663 | 1345 | 25.9 | 24.4 | 1.5 | 12.45 | 16.8 |
| Parameter | Value | Unit |
|---|---|---|
| Warm water temperature | 30 to 27 | °C |
| Cold water temperature | 5.5 to 6.5 | °C |
| Warm and cold water temperature difference range | 24.5 to 21.5 | °C |
| Pump RPM range | 950~1150 | RPM |
| Pump RPM step per 1 °C | 40 | RPM |
| Working time | 43,000 | Second |
| Reaction time | 36,000 | Second |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seungtaek, L.; Hoseang, L.; Hyeonju, K. Dynamic Simulation of System Performance Change by PID Automatic Control of Ocean Thermal Energy Conversion. J. Mar. Sci. Eng. 2020, 8, 59. https://doi.org/10.3390/jmse8010059
Seungtaek L, Hoseang L, Hyeonju K. Dynamic Simulation of System Performance Change by PID Automatic Control of Ocean Thermal Energy Conversion. Journal of Marine Science and Engineering. 2020; 8(1):59. https://doi.org/10.3390/jmse8010059
Chicago/Turabian StyleSeungtaek, Lim, Lee Hoseang, and Kim Hyeonju. 2020. "Dynamic Simulation of System Performance Change by PID Automatic Control of Ocean Thermal Energy Conversion" Journal of Marine Science and Engineering 8, no. 1: 59. https://doi.org/10.3390/jmse8010059