Reliability Analysis of Different Configurations of Master and Back-Up Systems Used in Maritime Navigation


Abstract
:1. Introduction
2. Research Related to Reliability of Electronic Navigation Systems
3. Assumptions Made for Reliability Analysis
- -
- State 3, full reliability, meaning the system is fully functional and all of its components are working properly without any disturbances.
- -
- State 2, partial reliability, representing the situation where some disruptions in system functioning appear, but exploitation parameters are within allowed limits (e.g., position accuracy decreases, but still satisfies respective standards).
- -
- State 1, task-limited reliability, occurring when disruptions of system functioning cause its exploitation parameters to fall below allowed limits.
- -
- State 0, entire unreliability, indicating system failure that stops its operation.
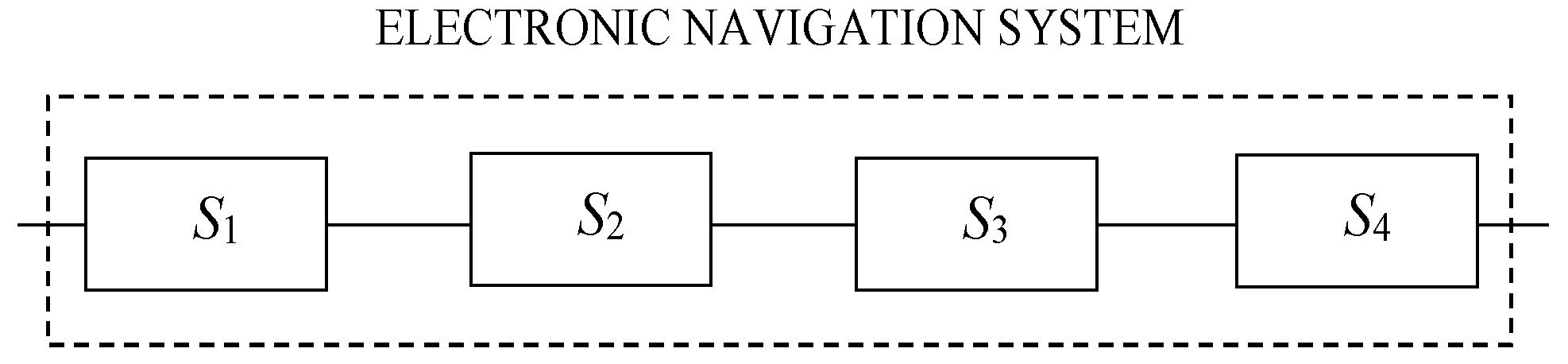
4. Reliability Analysis of Single Electronic Navigation System
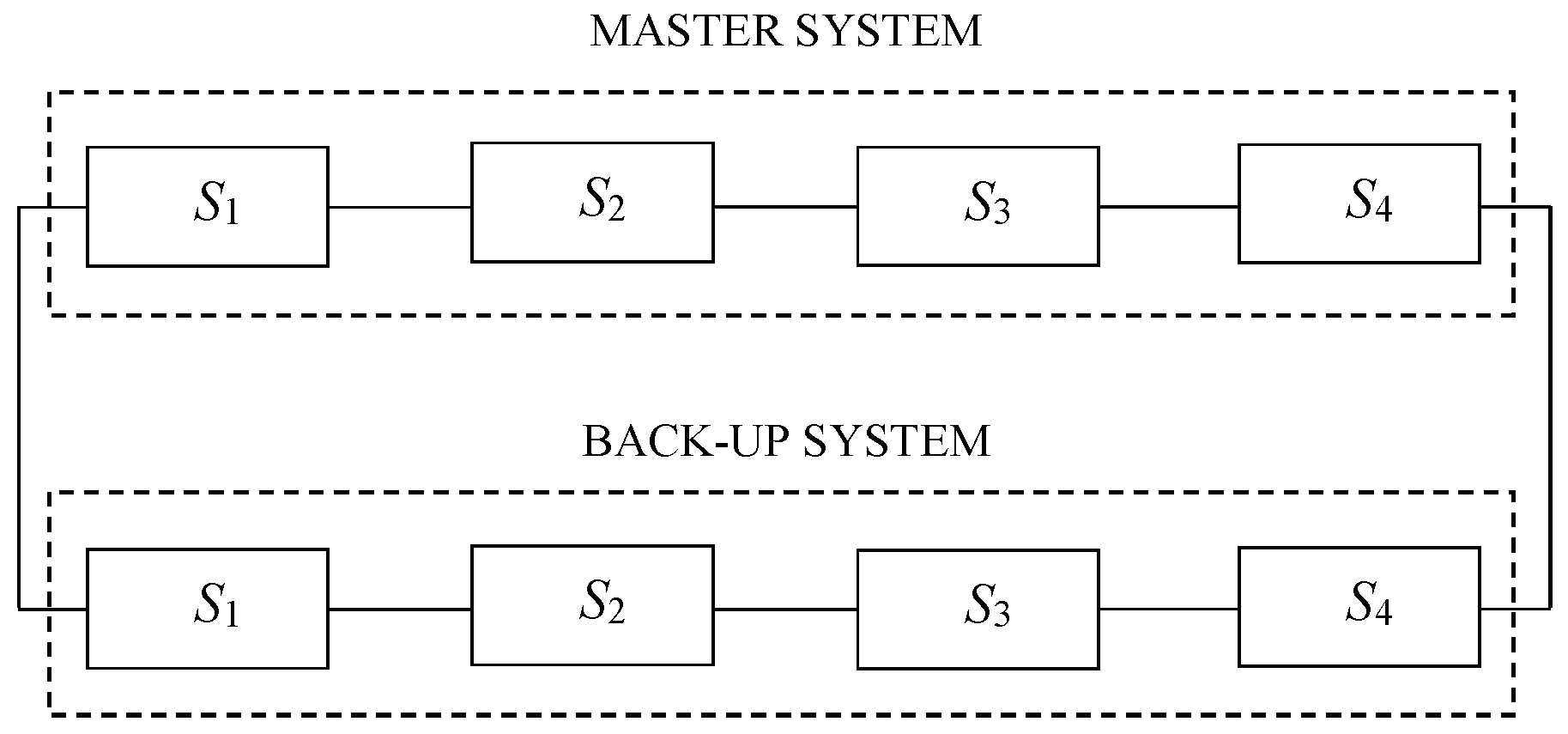
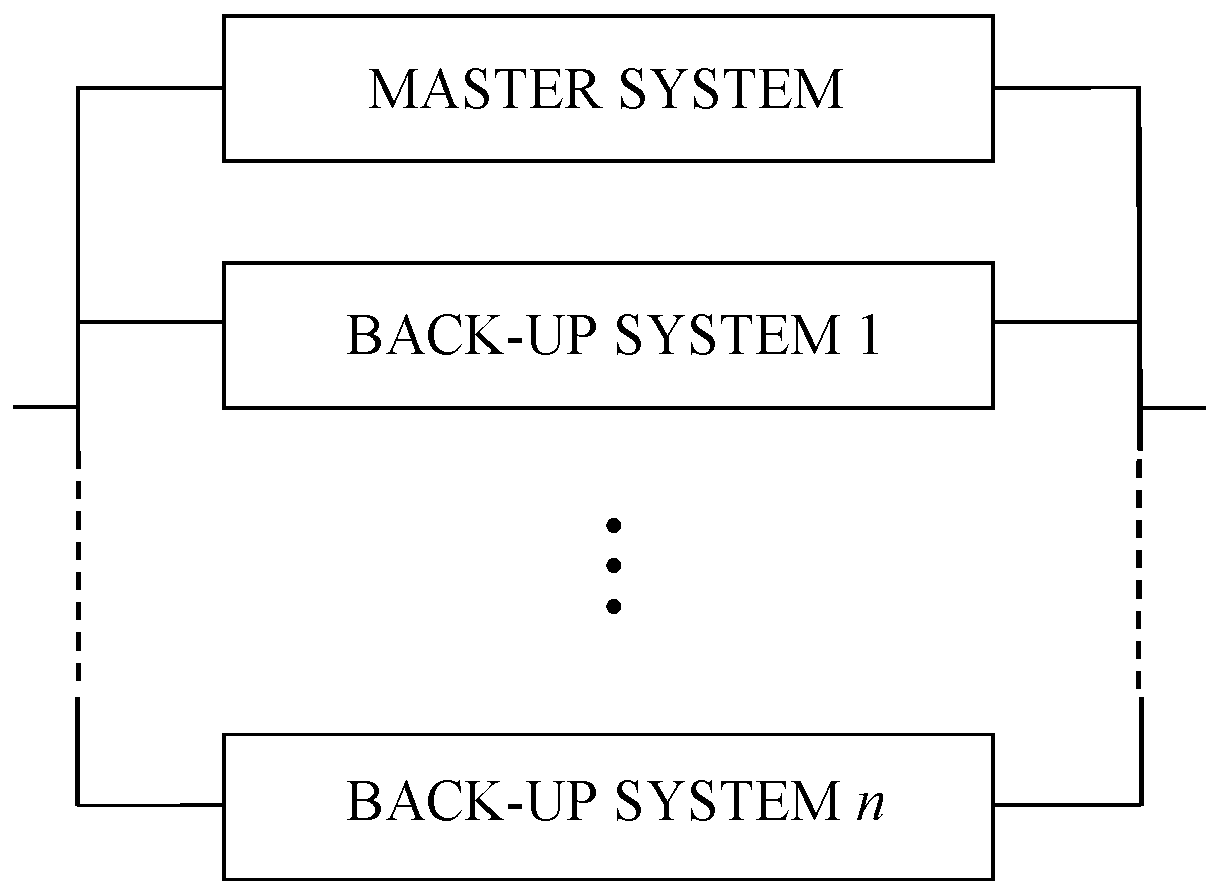
5. Reliability Analysis of a System Duplicated with a Number of Back-Up Systems
6. Discussion
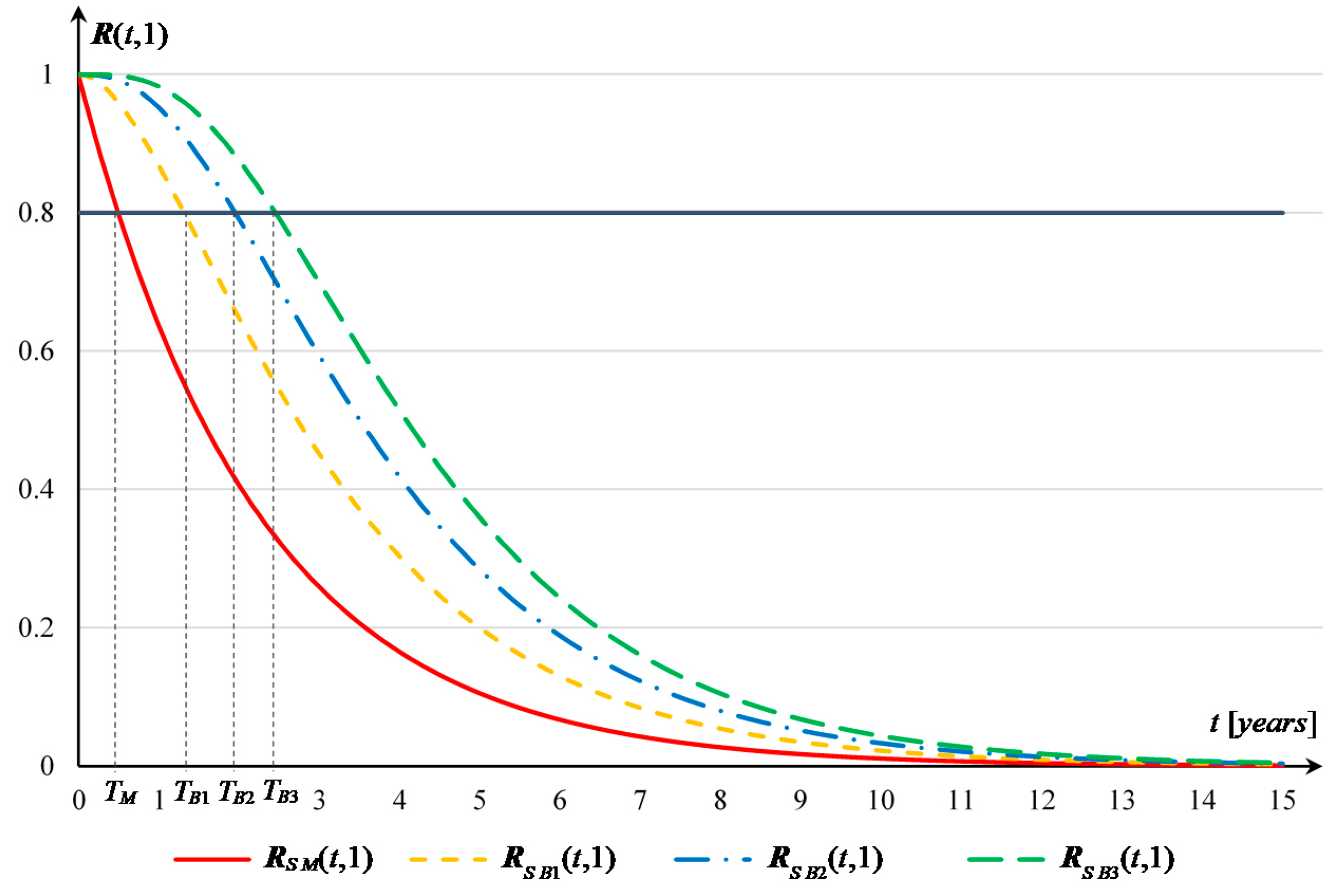
- For the single electronic navigation system TM (1) = 0.5 years
- For the system duplicated with one backup system TB1 (1) = 1.32 years
- For the system with two backup systems TB2 (1) = 1.96 years
- For the system with three backup systems TB3 (1) = 2.46 years
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IMO. International Convention for the Safety of Life at Sea, 1974; International Maritime Organisation: London, UK, 2014.
- Čolak, M.; Toman, I.; Bielić, T. Current Electronic Chart Display and Information Systems (ECDIS) in Use. In Proceedings of the 7th International Maritime Science Conference, Sorlin, Croatia, 20–21 April 2017; pp. 474–480. [Google Scholar]
- Weintrit, A. The Electronic Chart Display and Information System (ECDIS): An Operational Handbook, 1st ed.; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: London, UK, 2009. [Google Scholar]
- IALA. Guide to the Availability and Reliability of Aids to Navigation; International Association of Lighthouse and Aids to Navigation Authorities: Saint-Germain-en-Laye, France, 1989. [Google Scholar]
- Specht, C. Availability, Reliability and Continuity Model of Differential GPS Transmission. Annu. Navig. 2003, 5, 85. [Google Scholar]
- Jaskólski, K. Application of Markov Chains to Analyse the AIS Availability. Annu. Navig. 2011, 18, 5–16. [Google Scholar]
- Paś, J.; Rosiński, A. Selected issues regarding the reliability-operational assessment of electronic transport systems with regard to electromagnetic interference. Eksploat. Niezawodn. Maint. Reliab. 2017, 19, 375–381. [Google Scholar] [CrossRef]
- Sumic, D.; Perakovic, D.; Jurcevic, M. Contribution to ECDIS reliability using Markov Model. Trans. Marit. Sci. 2014, 3, 149–157. [Google Scholar] [CrossRef]
- Jiang, X.; Duan, F.; Tian, H.; Wei, X. Optimization of reliability centred predictive maintenance scheme for inertial navigation system. Reliab. Eng. Syst. Safe 2015, 140, 208–217. [Google Scholar] [CrossRef]
- Blokus-Roszkowska, A. Availability Analysis of Transport Navigation System under Imperfect Repair. In Contemporary Complex Systems and Their Dependability, Proceedings of the Thirteenth International Conference on Dependability and Complex Systems DepCoS-RELCOMEX 2018; Advances in Intelligent Systems and Computing Volume 761; Zamojski, W., Mazurkiewicz, J., Sugier, J., Walkowiak, T., Kacprzyk, J., Eds.; Springer: Cham, Switzerland, 2019; pp. 35–45. [Google Scholar]
- Weintrit, A.; Dziula, P.; Siergiejczyk, M.; Rosiński, A. Reliability and Exploitation Analysis of Navigational System Consisting of ECDIS and ECDIS Back-up Systems. In Activities in Navigation. Marine Navigation and Safety of Sea Transportation; Weintrit, A., Ed.; CRC Press/Balkema: Leiden, The Netherlands, 2015; pp. 109–115. [Google Scholar]
- Dziula, P.; Kołowrocki, K. Modelling the operation process of Global Baltic Network of Critical Infrastructure Networks. In Safety and Reliability, Theory and Applications: ESREL 2017; Cepin, M., Bris, R., Eds.; CRC Press/Balkema: London, UK, 2017; pp. 2445–2451. [Google Scholar]
- Kołowrocki, K. Reliability of Large and Complex Systems, 2nd ed.; Elsevier: London, UK, 2014. [Google Scholar]
- Kołowrocki, K.; Soszyńska-Budny, J. Reliability and Safety of Complex Technical Systems and Processes: Modeling—Identification—Prediction—Optimization, 1st ed.; Springer: London, UK, 2011. [Google Scholar]
- Bakalar, G.; Baggini, M.B. Bridge officers’ operational experiences with electronic chart display and information systems on ships. Pomor. Zb. 2016, 52, 49–61. [Google Scholar] [CrossRef]
- Blokus-Roszkowska, A.; Kołowrocki, K. Reliability analysis of ship-rope transporter with dependent components. In Safety and Reliability: Methodology and Applications, Proceedings of the European Safety and Reliability Conference, ESREL 2014, Wroclaw, Poland, 14–18 September 2014; Nowakowski, T., Młyńczak, M., Jodejko-Pietruczuk, A., Werbińska-Wojciechowska, S., Eds.; Taylor & Francis Group: London, UK, 2015; pp. 255–263. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Back-Up Systems n | µ (1) (h) | µ (1) (%) | µ (2) (h) | µ (2) (%) | µ (3) (h) | µ (3) (%) |
|---|---|---|---|---|---|---|
| 0 1 | 2.22 | 100% | 1.72 | 100% | 0.67 | 100% |
| 1 | 3.33 | 150% | 2.59 | 150% | 1.00 | 150% |
| 2 | 4.07 | 183% | 3.16 | 183% | 1.22 | 183% |
| 3 | 4.63 | 208% | 3.59 | 208% | 1.39 | 208% |
| 4 | 5.07 | 228% | 3.94 | 228% | 1.52 | 228% |
| 5 | 5.44 | 245% | 4.22 | 245% | 1.63 | 245% |
| 6 | 5.76 | 259% | 4.47 | 259% | 1.73 | 259% |
| 7 | 6.04 | 272% | 4.69 | 272% | 1.81 | 272% |
| 8 | 6.29 | 283% | 4.88 | 283% | 1.89 | 283% |
| 9 | 6.51 | 293% | 5.05 | 293% | 1.95 | 293% |
| 10 | 6.71 | 302% | 5.21 | 302% | 2.01 | 302% |
| Level of Reliability Function R (t, 1) | TM (1) (h) | TB1 (1) (h) | TB2 (1) (h) | TB3 (1) (h) |
|---|---|---|---|---|
| 0.95 | 0.12 | 0.57 | 1.03 | 1.43 |
| 0.90 | 0.24 | 0.85 | 1.39 | 1.84 |
| 0.85 | 0.37 | 1.09 | 1.69 | 2.17 |
| 0.80 | 0.50 | 1.32 | 1.96 | 2.46 |
| 0.75 | 0.64 | 1.55 | 2.21 | 2.73 |
| 0.70 | 0.80 | 1.77 | 2.46 | 3.00 |
| 0.65 | 0.96 | 2.00 | 2.72 | 3.26 |
| 0.60 | 1.14 | 2.23 | 2.97 | 3.53 |
| Level of Reliability Function R (t, 3) | TM (3) (h) | TB1 (3) (h) | TB2 (3) (h) | TB3 (3) (h) |
|---|---|---|---|---|
| 0.95 | 0.04 | 0.17 | 0.31 | 0.43 |
| 0.90 | 0.08 | 0.26 | 0.42 | 0.56 |
| 0.85 | 0.11 | 0.33 | 0.51 | 0.65 |
| 0.80 | 0.15 | 0.40 | 0.59 | 0.74 |
| 0.75 | 0.20 | 0.47 | 0.67 | 0.82 |
| 0.70 | 0.24 | 0.53 | 0.74 | 0.90 |
| 0.65 | 0.29 | 0.60 | 0.82 | 0.98 |
| 0.60 | 0.35 | 0.67 | 0.89 | 1.06 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blokus, A.; Dziula, P. Reliability Analysis of Different Configurations of Master and Back-Up Systems Used in Maritime Navigation. J. Mar. Sci. Eng. 2020, 8, 34. https://doi.org/10.3390/jmse8010034
Blokus A, Dziula P. Reliability Analysis of Different Configurations of Master and Back-Up Systems Used in Maritime Navigation. Journal of Marine Science and Engineering. 2020; 8(1):34. https://doi.org/10.3390/jmse8010034
Chicago/Turabian StyleBlokus, Agnieszka, and Przemysław Dziula. 2020. "Reliability Analysis of Different Configurations of Master and Back-Up Systems Used in Maritime Navigation" Journal of Marine Science and Engineering 8, no. 1: 34. https://doi.org/10.3390/jmse8010034