Development of a Blended Time-Domain Program for Predicting the Motions of a Wave Energy Structure


Abstract
:1. Introduction
2. Mathematical Model Description
2.1. Coordinate Systems
2.2. Governing Equations
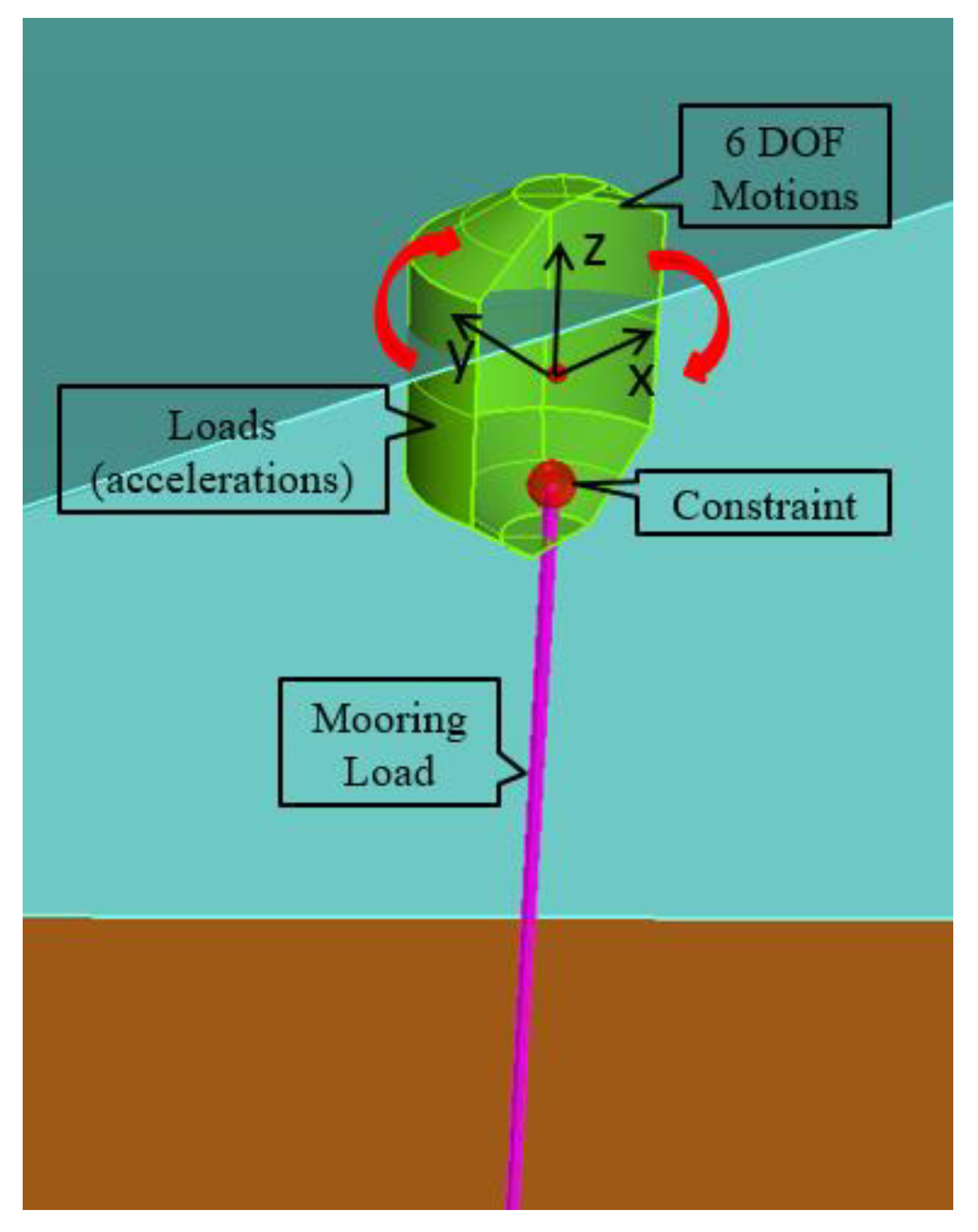
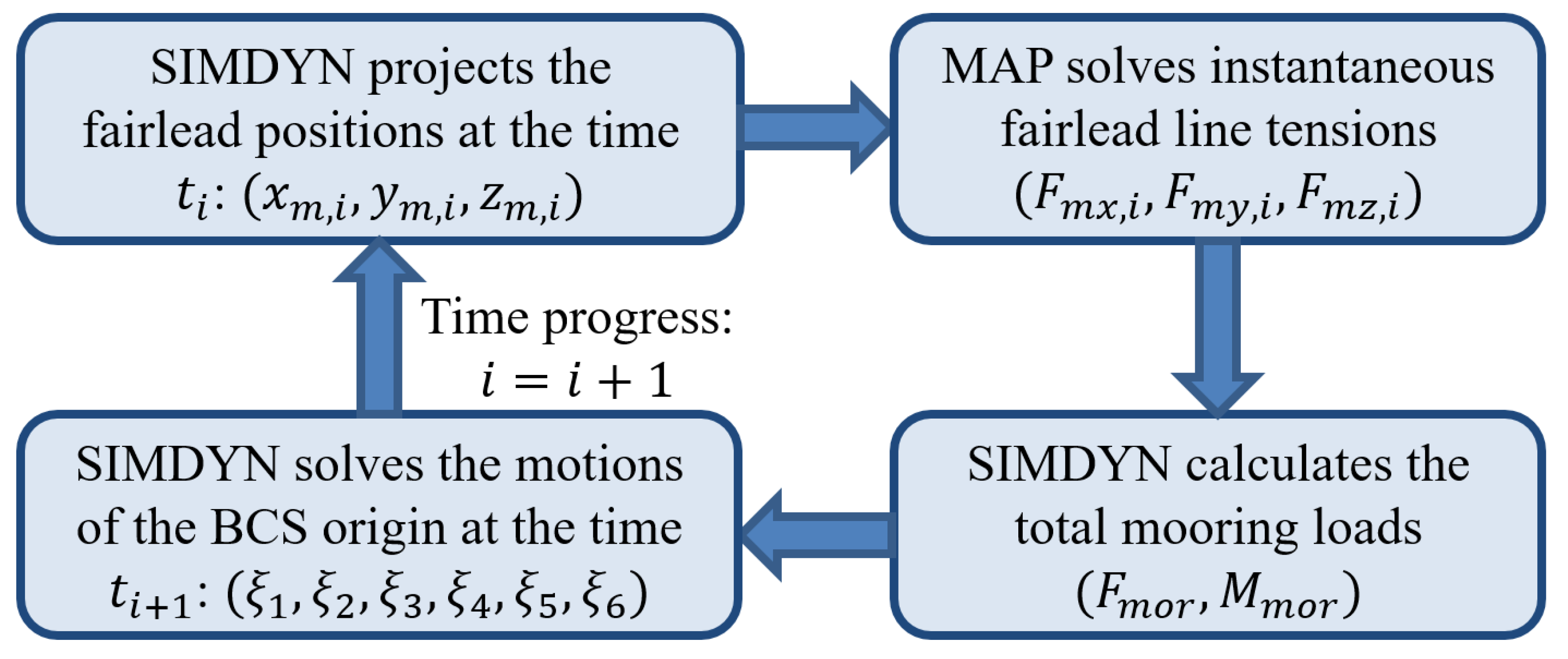
2.2.1. Mooring Forces/Moments
2.2.2. Slowly Varying Drift Forces/Moments
2.2.3. Viscous Forces/Moments
3. Nonlinear Froude-Krylov and Hydrostatic Forces
3.1. Formulation of Nonlinear Froude-Krylov and Hydrostatic Forces
3.2. Nonlinear Effects of Froude=Krylov and Hydrostatic Forces
- (1)
- The forced motion tests show the different forcing corresponding to the same (large) motions. That can indicate the motion (as the final result) differences in an implicit way;
- (2)
- Any simulation tool comes with limitations. The forced motion test avoids the problem by disabling modules not robust enough and not very relevant (for example, the mooring module is not the focus of this study);
- (3)
- The forced motion test is a control-variable test. It eliminates the effects of other forces, which makes the effect from each force component clearer.
- (1)
- The instantaneous rotations of the structure are not addressed in the linear modeling, so the wetted surfaces and the corresponding pressures are different.
- (2)
- The instantaneous rotations of the structure are not addressed in the linear modeling, so the normal direction variation of each panel is not captured.
- (3)
- The translation motions of the structure are not captured in the linear method, so the wetted surfaces and the corresponding pressures are different. Note that the surge and sway influence the relative phase of the incident wave, so they also contribute to the differences.
4. Nonlinear Inertia Forces
4.1. Derivations of the Nonlinear Inertia Forces
4.2. Nonlinear Effects of the Inertia Force
5. Model Test Correlations
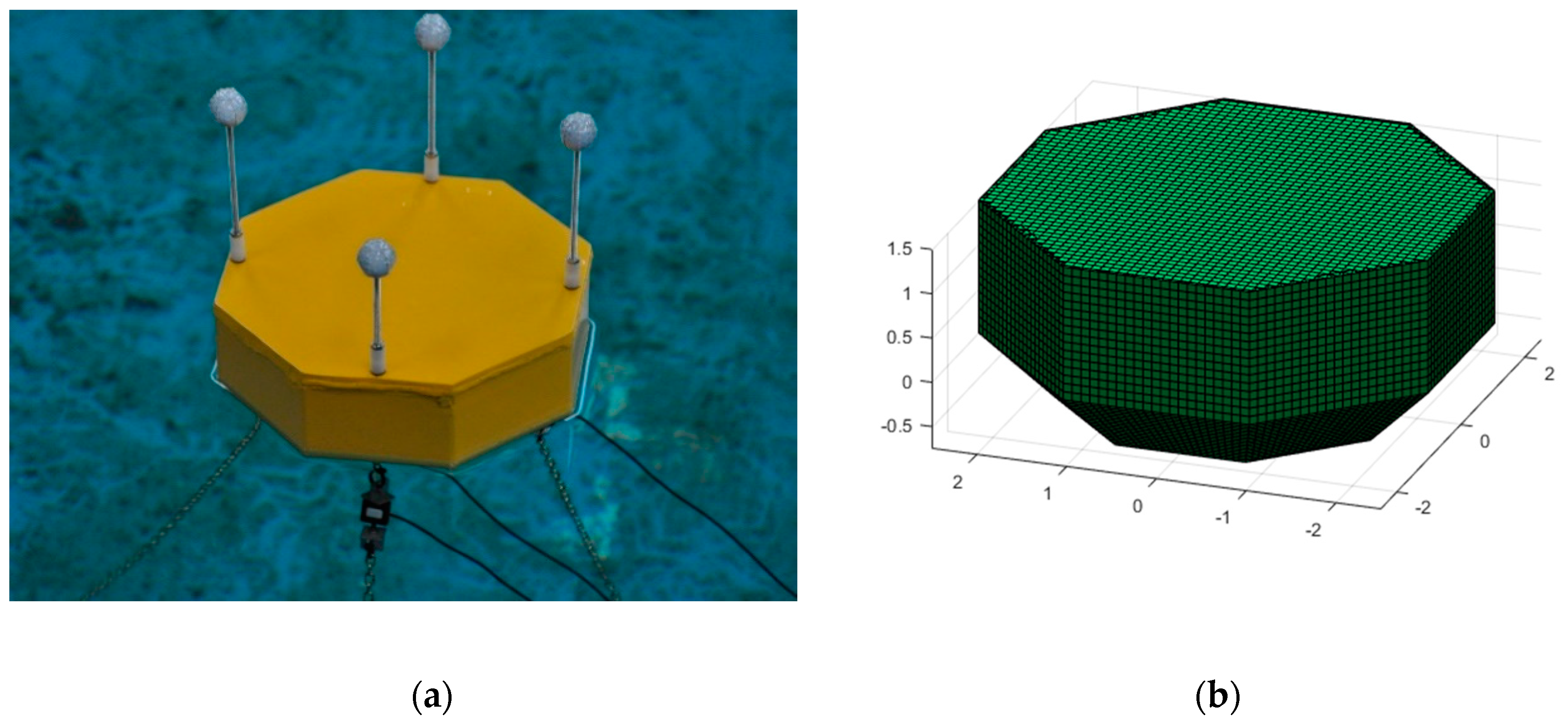
5.1. Model Test Setup and Input Information
5.2. Correlations of the Regular Wave Cases
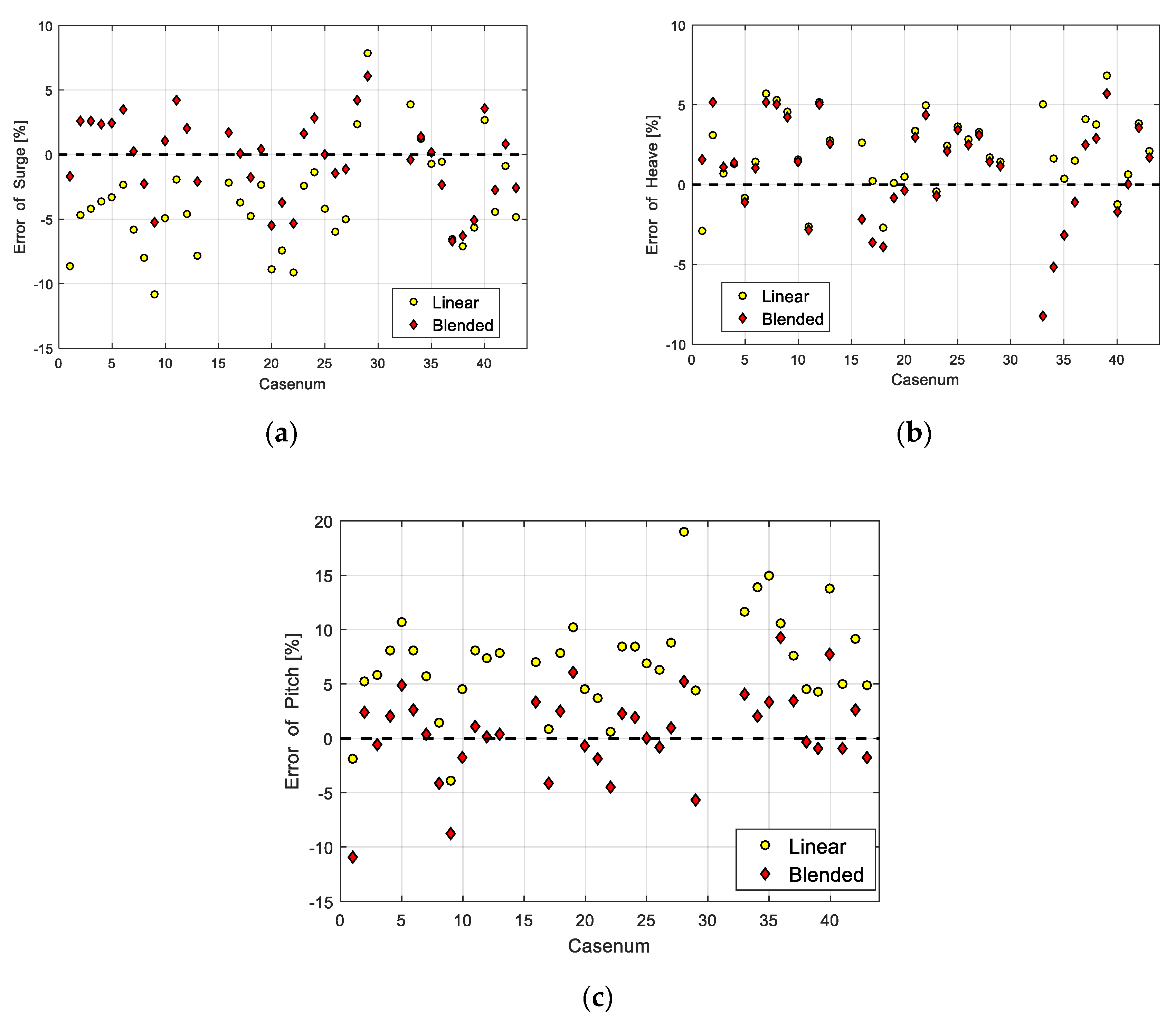
5.3. Correlations of Irregular Wave Cases
6. Discussion
7. Conclusions
- (1)
- A simulation program, SIMDYN, was developed using both the linear and the blended time-domain methods to predict the motions (six degrees of freedom) of the wave energy converters.
- (2)
- The nonlinear Froude-Krylov and hydrostatic forces were implemented in SIMDYN. The (dominant) external forces can be calculated more accurately without requiring significantly more calculation time.
- (3)
- The nonlinear inertia effects were addressed, which were usually neglected in the time domain analysis. They may prove to be as important as the nonlinear effects of the external forces.
- (4)
- The study also filled the gap in that the blended method has seldom been correlated with WES model tests. The comparisons between the simulations and the model tests were improved by the blended method.
- (5)
- The working mode modeling of the (point absorber type) WEC will benefit from the blended time-domain method’s more accurate motion predictions.
- (6)
- The survival mode (under large sea states) modeling of the (point absorber type) WEC can be greatly improved using the blended time-domain method without increasing the calculation time several orders of magnitude of as would occur using a fully nonlinear time-domain program or a CFD program.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Falcão, A.F. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Lópeza, I.; Andreu, J.; Ceballos, S.; Alegría, I.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Lettenmaier, T.; Amon, E.; Jouanne, A. Power converter and control system developed in the ocean sentinel instrumentation buoy for testing wave energy converters. In Proceedings of the 3rd IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013. [Google Scholar]
- Coe, R.G.; Neary, V.S.; Lawson, M.; Yu, Y.H.; Weber, J. Extreme Conditions Modelling Workshop Report; The National Renewable Energy Laboratory: Golden, CO, USA, 2014.
- Yu, Y.H. WEC-Sim, a Time-Domain Numerical Model Development, Verification and Validation; National Renewable Energy Laboratory: Golden, CO, USA, 2017.
- Det Norske Veritas. Environmental Conditions and Environmental Loads, Recommended Practice; DNV-RP-C205; Det Norske Veritas: Oslo, Norway, 2007. [Google Scholar]
- ANSYS Inc. AQWA-DRFT User Manual; ANSYS Inc.: Houston, TX, USA, 2013. [Google Scholar]
- WAMIT Inc. WAMIT User Manual Version 7.0; WAMIT, Inc.: Chestnut Hill, MA, USA, 2013. [Google Scholar]
- Penalba, M.; Kelly, T.; Ringwood, J.V. Using NEMOH for modelling wave energy converters: A comparative study with WAMIT. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–2 September 2017. [Google Scholar]
- Reed, A.; Beck, R. Advances in the predictive capability for ship dynamics in extreme waves. In Proceedings of the Society of Naval Architects and Marine Engineers Maritime Convention, Bellevue, Washington, DC, USA, 1–5 November 2016. [Google Scholar]
- The National Renewable Energy Laboratory and Sandia Corporation. WEC-Sim User Guide Version 1.0; 11.t National Renewable Energy Laboratory and Sandia Corporation: Golden, CO, USA, 2014.
- Somayajula, A.; Falzarano, J. Large-amplitude time-domain simulation tool for marine and offshore motion prediction. Mar. Syst. Ocean Technol. 2015, 10, 1–17. [Google Scholar] [CrossRef]
- Stern, F.; Carrica, P.; Kandasamy, M.; Ooi, S.K.; Fu, T.Z.J.; Hendrix, D.; Kennell, C.; Hughes, M.G.; Miller, R.; Marino, T.; et al. Computational Hydrodynamic Tools for High-speed Sealift: Phase II Final Report; The University of Iowa: Iowa City, IA, USA, 2008. [Google Scholar]
- Yu, Y.H.; Rij, J.; Coe, R.; Lawson, M. Preliminary wave energy converters extreme load analysis. In Proceedings of the 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Yeylaghi, S.; Moa, B.; Beatty, S.; Buckham, B.; Oshkai, P.; Crawford, C. SPH modelling of hydrodynamic loads on a point absorber wave energy converter hull. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Sagaut, P. Large Eddy Simulation for Incompressible Flows: An Introduction; Springer: New York, NY, USA, 2006. [Google Scholar]
- CD-adapco. User Guide STAR-CCM+ Version 9.04; CD-adapco: Melville, NY, USA, 2014. [Google Scholar]
- OpenFOAM Foundation Ltd. OpenFOAM User Guide; OpenFOAM Foundation Ltd.: London, UK, 2019. [Google Scholar]
- Lawson, M.; Garzon, B.B.; Wendt, F.; Yu, Y.H.; Michelen, C. COER hydrodynamic modelling competition: Modelling the dynamic response of a floating body using the WEC-Sim and FAST simulation tools. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Umeda, N.; Hashimoto, H.; Tsukamoto, I.; Sogawa, Y. Estimation of parametric roll in random seaway. In Parametric Resonance in Dynamical Systems; Fossen, T.I., Nijmeijer, H., Eds.; Springer: New York, NY, USA, 2012; pp. 45–59. [Google Scholar]
- Belenky, V.L.; Weems, K.M.; Lin, W.M.; Paulling, J.R. Probabilistic analysis of roll parametric resonance in head seas. In Proceedings of the 8th International Conference on Stability of Ships and Ocean Vehicles, Madrid, Spain, 15–19 September 2003. [Google Scholar]
- Chen, X. Studies on Dynamic Interaction between Deep-water Floating Structures and Their Mooring/tendon System. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2002. [Google Scholar]
- Lawson, M.; Yu, Y.H.; Nelessen, A.; Ruehl, K.; Michelen, C. Implementing nonlinear buoyancy and excitation forces in the WEC-Sim wave energy converter modelling tool. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Beck, R.F.; Reed, A.M. Modern computational methods for ships in a seaway. SNAME Trans. 2001, 109, 1–51. [Google Scholar]
- Penalba, M.; Giorgi, G.; Ringwood, J. Mathematical modelling of wave energy converters: A review of nonlinear approaches. Renew. Sustain. Energy. Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef] [Green Version]
- Ransley, E.J.; Greaves, D.; Raby, A.; Simmonds, D.; Hann, M. Survivability of wave energy converters using CFD. Renew. Energy 2017, 109, 235–247. [Google Scholar] [CrossRef] [Green Version]
- MAP++ Documentation Release1.15. Available online: https://map-plus-plus.readthedocs.io/en/latest (accessed on 3 January 2019).
- Wang, H.; Falzarano, J. Energy balance analysis method in oscillating type wave converter. J. Ocean Eng. Mar. Energy 2017, 3, 193–208. [Google Scholar] [CrossRef]
- Sirnivas, S.; Yu, Y.H.; Hall, M.; Bosma, B. Coupled mooring analyses for the WEC-SIM wave energy converter design tool. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 June 2016. [Google Scholar]
- Ruehl, K.; Michelen, C.; Bosma, B.; Yu, Y.H. WEC-Sim Phase 1 validation testing: Numerical modelling of experiments. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Busan, Korea, 19–24 June 2016. [Google Scholar]
- Bosma, B.; Sheng, W.; Thiebaut, F. Performance assessment of a floating power system for the Galway Bay wave energy test site. In Proceedings of the 5th International Conference on Ocean Energy, Halifax, NS, Canada, 4–6 November 2014. [Google Scholar]
- Ogilvie, T. Second-order hydrodynamic effects on ocean platforms. In International Workshop on Ship and Platform Motions; UC Berkeley: Berkley, CA, USA, 1983. [Google Scholar]
- WEC-Sim Documentation. Available online: https://wec-sim.github.io/WEC-Sim/index.html (accessed on 31 April 2019).
- Masciola, M.; Jonkman, J.; Robertson, A. Implementation of a multisigmented, quasi-static cable mode. In Proceedings of the 23rd International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Somayajula, A.; Falzarano, J. A comparative assessment of approximate methods to simulate second order roll motion of FPSOs. Ocean Syst. Eng. 2017, 7, 53–74. [Google Scholar] [CrossRef]
- Xie, Z.; Liu, Y.; Falzarano, J. A numerical evaluation of the quadratic transfer function for a floating structure. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- OrcaFlex Documentation. Available online: http://www.orcina.com/Software/Products/OrcaFlex/Documentation/Help (accessed on 5 February 2019).
- Giorgi, G.; Ringwood, J.V. Relevance of pressure field accuracy for nonlinear Froude-Krylov force calculations for wave energy devices. J. Ocean Eng. Mar. Energy 2018, 4, 57–71. [Google Scholar] [CrossRef] [Green Version]
- Cummins, W. The Impulse Response Function and Ship Motions; Technical Report; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. A Compact 6-DoF Nonlinear Wave Energy Device Model for Power Assessment and Control Investigations. IEEE Trans. Sustain. Energy 2018, 10, 119–126. [Google Scholar] [CrossRef]
- Giorgi, G.; Ringwood, J.V. Analytical representation of nonlinear Froude-Krylov forces for 3-DoF point absorbing wave energy device. Ocean Eng. 2019, 164, 749–759. [Google Scholar] [CrossRef] [Green Version]
- Tarrant, K.; Meskell, C. Investigation on parametrically excited motions of point absorbers in regular waves. Ocean Eng. 2016, 111, 67–81. [Google Scholar] [CrossRef]
- Babarit, A.; Mouslim, H.; Clément, A.; Laporte-Weywada, P. On the numerical modelling of the nonlinear behaviour of a wave energy converter. In Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Giorgi, G.; Ringwood, J.V. Articulating parametric resonance for an OWC spar buoy in regular and irregular waves. J. Ocean Eng. Mar. Energy 2018, 4, 311–322. [Google Scholar] [CrossRef]
- Kurniawan, A.; Grassow, M.; Ferri, F. Numerical modelling and wave tank testing of a self-reacting two-body wave energy device. Ships Offshore Struct. 2019, 14, 344–356. [Google Scholar] [CrossRef]
- Palm, J.; Eskilsson, C.; Bergdahl, L. Parametric excitation of moored wave energy converters using viscous and non-viscous CFD simulations. In Proceedings of the 3rd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 8–10 October 2018. [Google Scholar]
- Gomes, R.P.F.; Ferreira, J.D.C.M.; Silva, S.R.; Henriques, J.C.C.; Gato, L.M.C. An experimental study on the reduction of the dynamic instability in the oscillating water column spar buoy. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Orszaghova, J.; Wolgamot, H.; Draper, S.; Eatock Taylor, R.; Taylor, P.H.; Rafiee, A. Transverse motion instability of a submerged moored buoy. Proc. R. Soc. A Math. Phys. Eng. Sci. 2019, 475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Orszaghova, J.; Wolgamot, H.; Draper, S.; Rafiee, A. Motion instabilities in tethered buoy WECs. In Proceedings of the 4th Asian Wave and Tidal Energy Conference, Taipei, China, 9–13 September 2018. [Google Scholar]
- Orszaghova, J.; Wolgamot, H.; Eatock Taylor, W.; Draper, S.; Rafiee, A.; Taylor, P.H. Simplified dynamics of a moored submerged buoy. In Proceedings of the 32nd International Workshop on Water Waves and Floating Bodies, Dalian, China, 23–26 April 2017. [Google Scholar]
- Guha, A. Development and Application of a Potential Flow Computer Program: Determining First and Second Order Wave Forces at Zero and Forward Speed in Deep and Intermediate Water Depth. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2016. [Google Scholar]
- Liu, Y.; Falzarano, J. Suppression of irregular frequency effect in hydrodynamic problems and free-surface singularity treatment. J. Offshore Mech. Arct. Eng. 2017, 139, 1–16. [Google Scholar] [CrossRef]
- Guha, A.; Falzarano, J. Development of a computer program for three dimensional analysis of zero speed first order wave body interaction in frequency domain. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Guha, A.; Falzarano, J. The effect of hull emergence angle on the near field formulation of added resistance. Ocean Eng. 2015, 105, 10–24. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Hydrodynamics | Software |
|---|---|---|
| 1 | Morison’s Equation [6] | N/A |
| 2 | Linear time (frequency) domain potential flow [7] | AQWA [7], WAMIT [8], Nemoh [9] |
| 3 | Blended time-domain potential flow [10] | WEC-Sim [11], SIMDYN [12] |
| 4 | Nonlinear time-domain potential flow [13] | Aegir [13] |
| 5 | Computation Fluid Dynamics (RANS [14], SPH [15], LES [16]) | STAR-CCM+ [17], OpenFoam [18] |
| 6 | Model tests [19] (Physical modeling) | N/A |
| Code Name | AQWA | WaveDyn | WEC-Sim | SIMDYN |
|---|---|---|---|---|
| Developer | ANSYS Inc. | DNV GL | SNL & NREL | MDL |
| Froude-Krylov | Linear, Nonlinear | Linear, Nonlinear | Linear, Nonlinear | Linear, Nonlinear |
| Hydrostatics | Linear, Nonlinear | Linear, Nonlinear | Linear, Nonlinear | Linear, Nonlinear |
| Inertia Forces | Linear | Linear | Linear | Nonlinear |
| Drift Forces | Full QTF | N/A | N/A | Full QTF |
| License | Commercial | Commercial | Open-Source | Research |
| Characteristic | Value | Characteristic | Value |
|---|---|---|---|
| Mass M (kg) | 11,337.9 | Anchor vertical position (m) | −25.0 |
| Length Lpp (m) | 5.00 | Anchor horizontal position (m) | 65.0 |
| Breadth B (m) | 5.00 | Mooring line length (m) | 75.0 |
| Height D (m) | 2.25 | Mass/unit length (kg/m) | 28.438 |
| VCG (m) | 0.64 | Mooring line diameter (m) | 0.15 |
| Kxx (m) | 1.386 | Added mass coefficient | 1.0 |
| Kyy (m) | 1.386 | Transverse drag coefficient | 1.0 |
| Kzz (m) | 1.821 | Longitudinal drag coefficient | 0.025 |
| Draft T (m) | 0.75 | EA (N/m) | 1.0 × 108 |
| Water depth h (m) | 25.0 | Maximum tension (kN) | 100.0 |
| Fairlead vertical position (m) | −0.75 | Number of mooring lines | 3 |
| Fairlead horizontal position (m) | 1.5 | Line azimuth difference (°) | 120 |
| Item | Surge | Heave | Pitch | |
|---|---|---|---|---|
| Mean | Linear | −3.7% | 2.0% | 7.0% |
| Blended | −0.3% | 1.0% | 0.5% | |
| Mean of Abs | Linear | 4.7% | 2.6% | 7.3% |
| Blended | 2.6% | 2.8% | 3.1% | |
| Item | Surge | Heave | Pitch | |
|---|---|---|---|---|
| Mean | Linear | −13.8% | 0.7% | 4.3% |
| Blended | −9.5% | 0.7% | −1.0% | |
| Mean of Abs | Linear | 13.8% | 0.7% | 6.9% |
| Blended | 10.2% | 0.7% | 8.1% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Somayajula, A.; Falzarano, J.; Xie, Z. Development of a Blended Time-Domain Program for Predicting the Motions of a Wave Energy Structure. J. Mar. Sci. Eng. 2020, 8, 1. https://doi.org/10.3390/jmse8010001
Wang H, Somayajula A, Falzarano J, Xie Z. Development of a Blended Time-Domain Program for Predicting the Motions of a Wave Energy Structure. Journal of Marine Science and Engineering. 2020; 8(1):1. https://doi.org/10.3390/jmse8010001
Chicago/Turabian StyleWang, Hao, Abhilash Somayajula, Jeffrey Falzarano, and Zhitian Xie. 2020. "Development of a Blended Time-Domain Program for Predicting the Motions of a Wave Energy Structure" Journal of Marine Science and Engineering 8, no. 1: 1. https://doi.org/10.3390/jmse8010001