Linear Analysis of the Static and Dynamic Responses of the Underwater Axially Moving Cables to Bucket Loads


Abstract
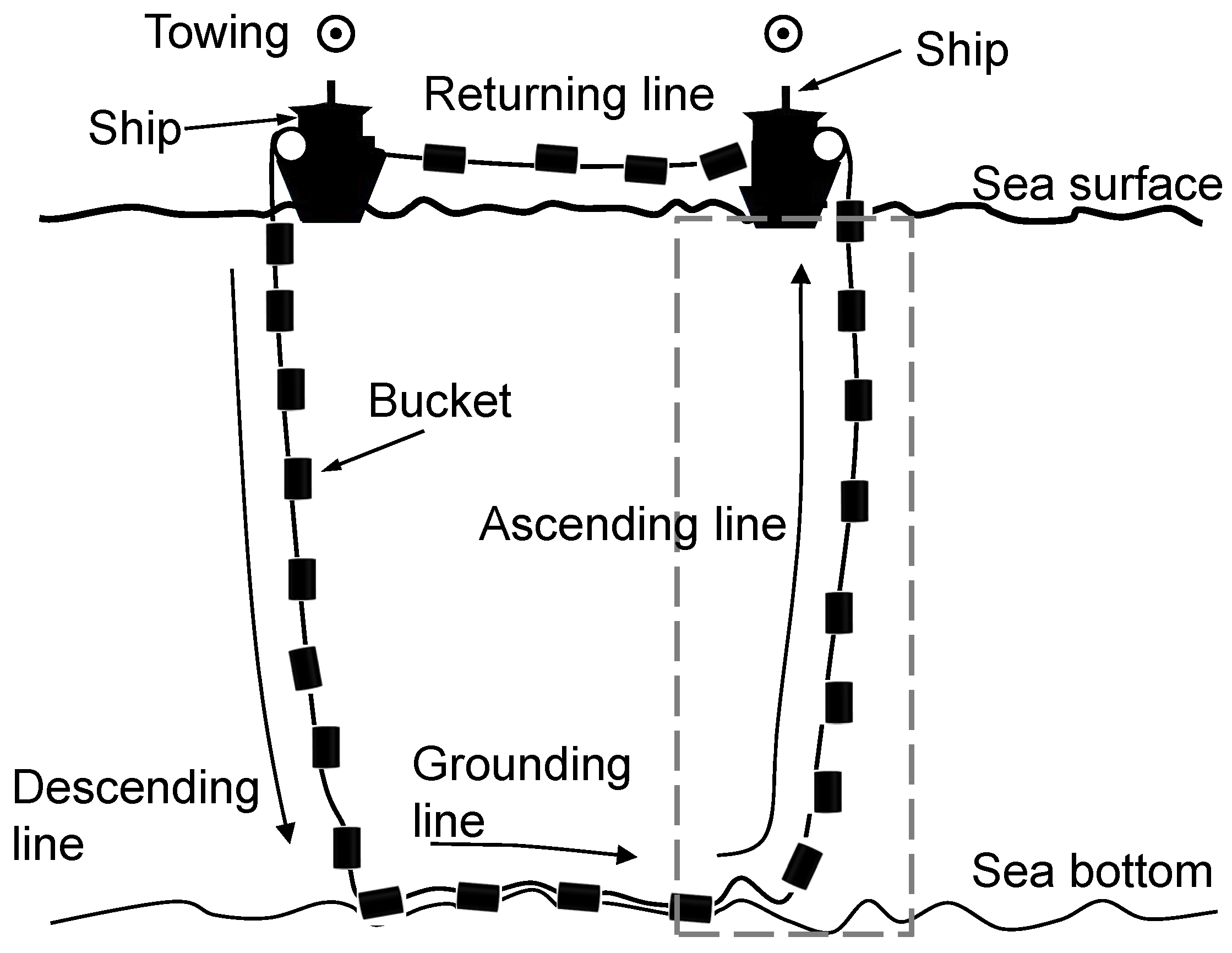
:1. Introduction
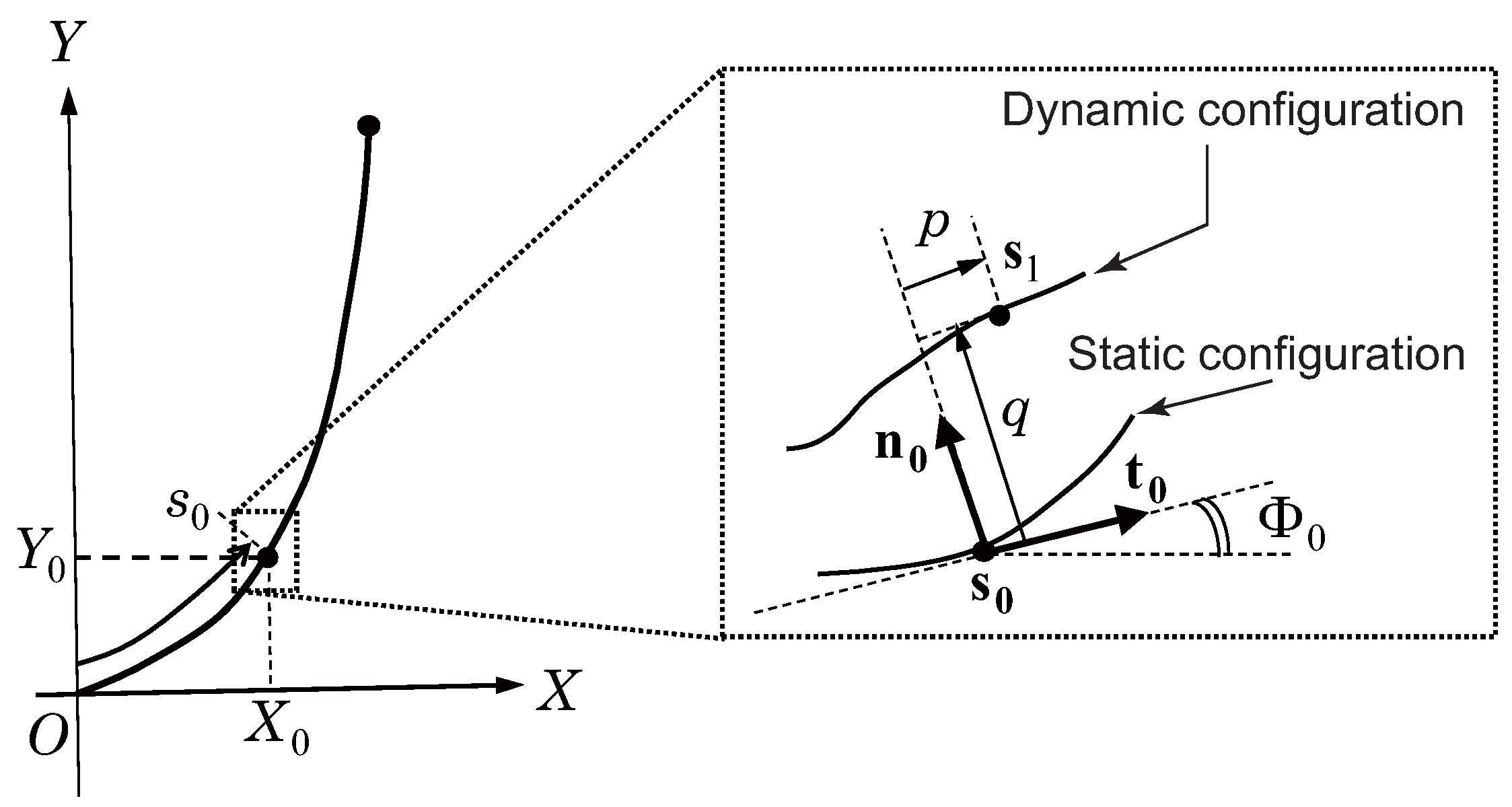
2. Governing Equations
2.1. Solution for the Static State
2.2. Equation of Motion
2.3. Compatibility Relation
2.4. Dimensionless Equation of Motion
3. Mode Expansion Method
4. Solution of the Generalized Coordinate
5. Results and Discussion
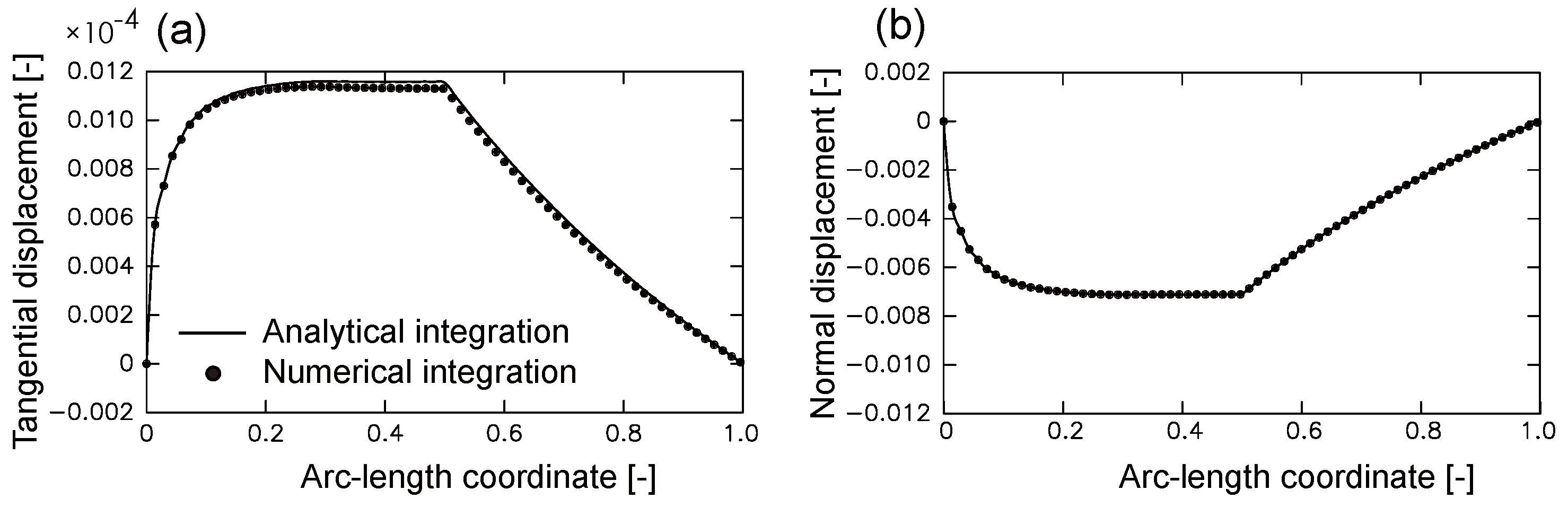
5.1. Accuracy of the Numerical Integration
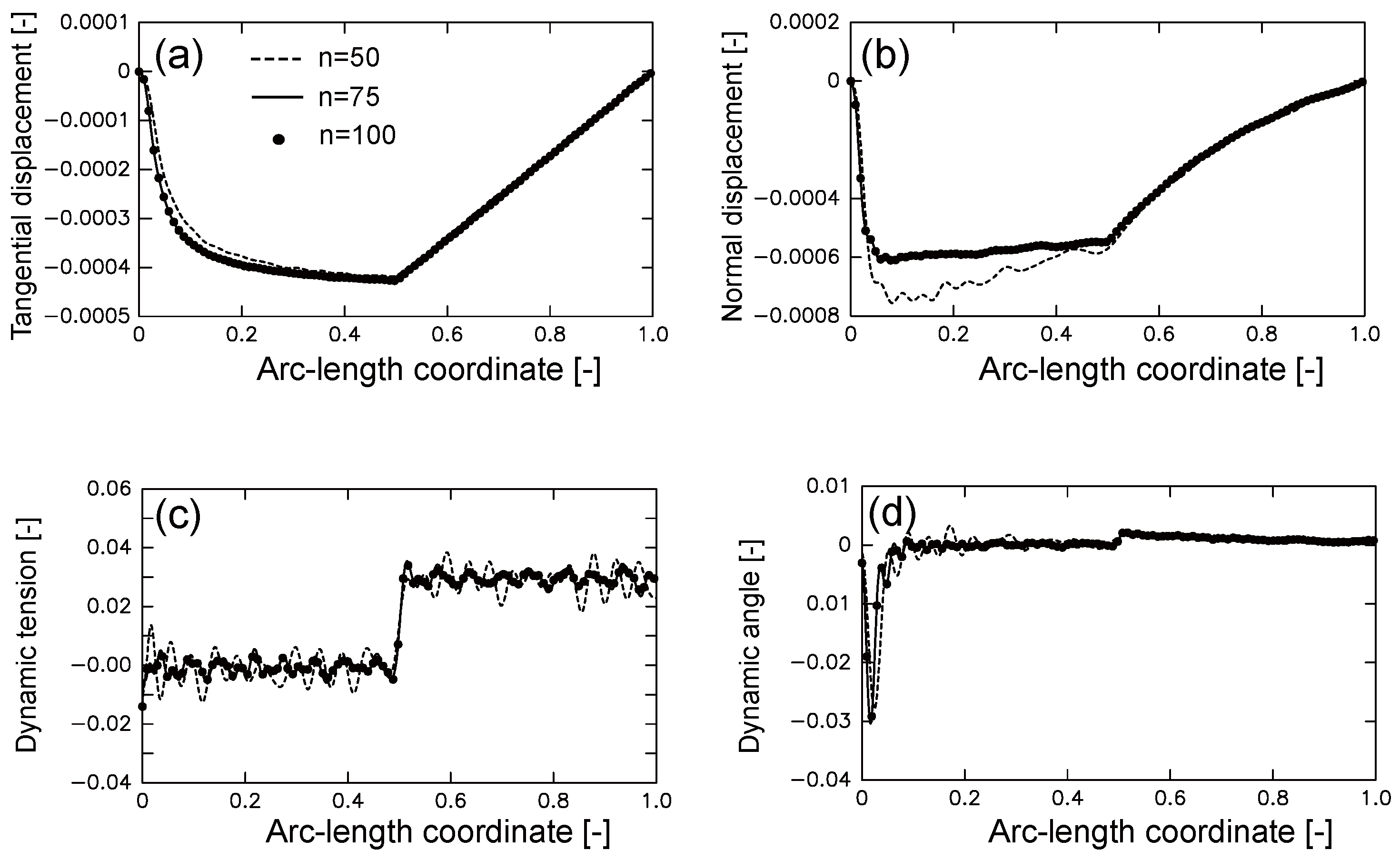
5.2. Numerical Convergence
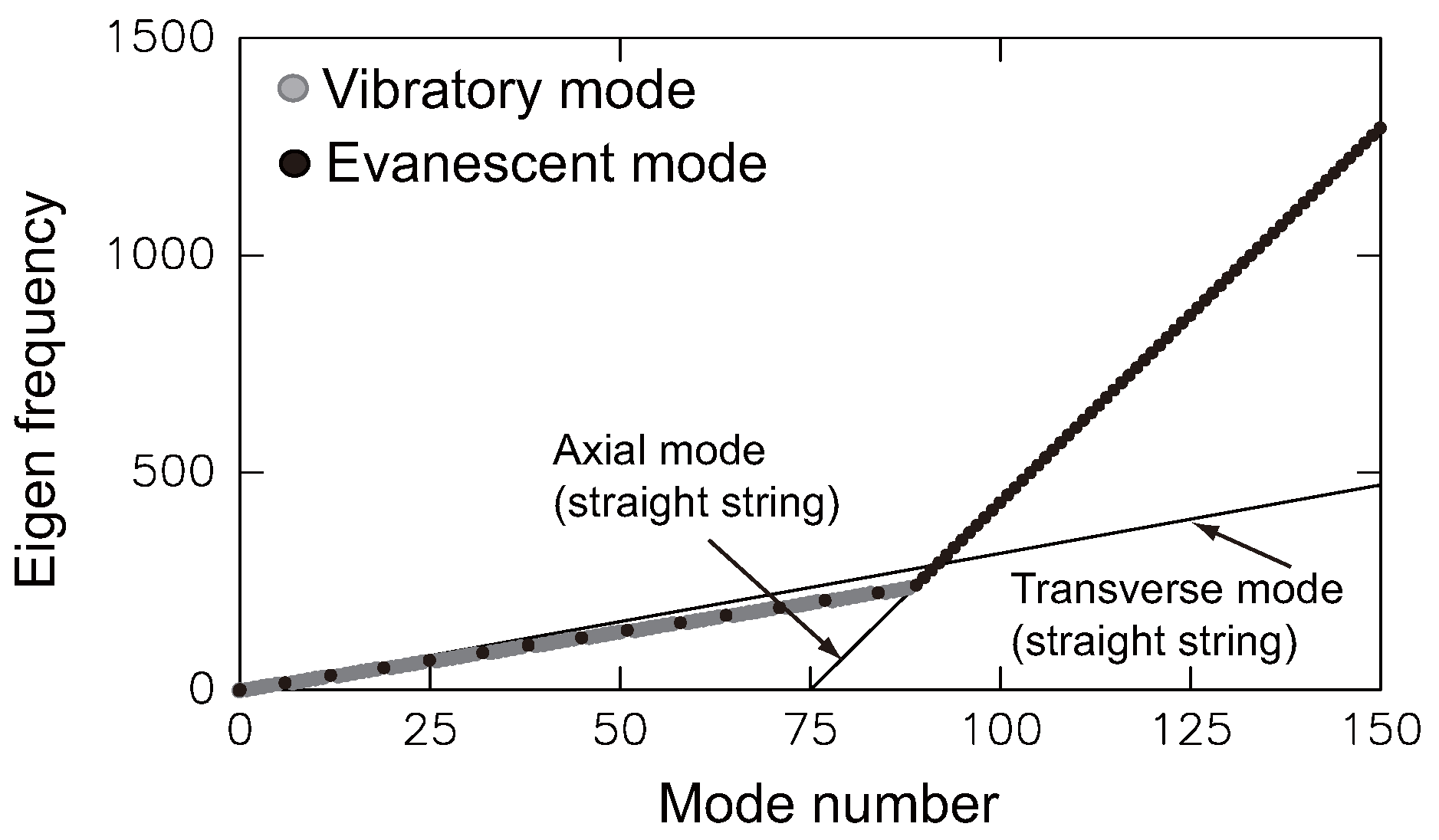
5.3. Eigenvalues
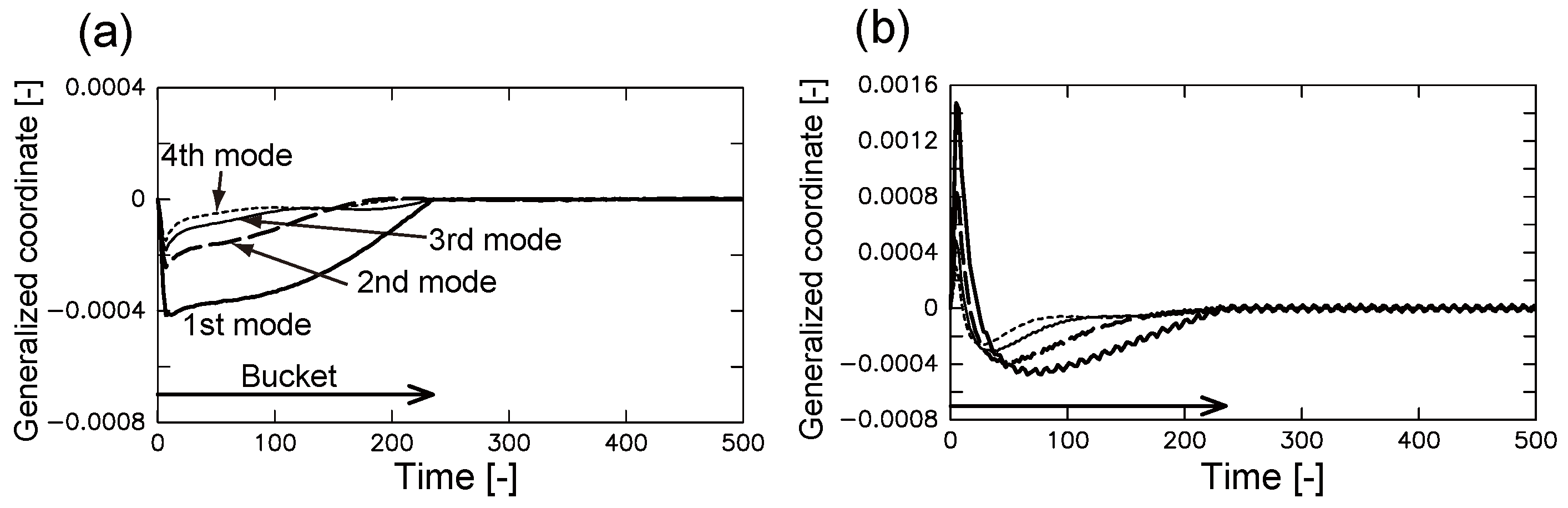
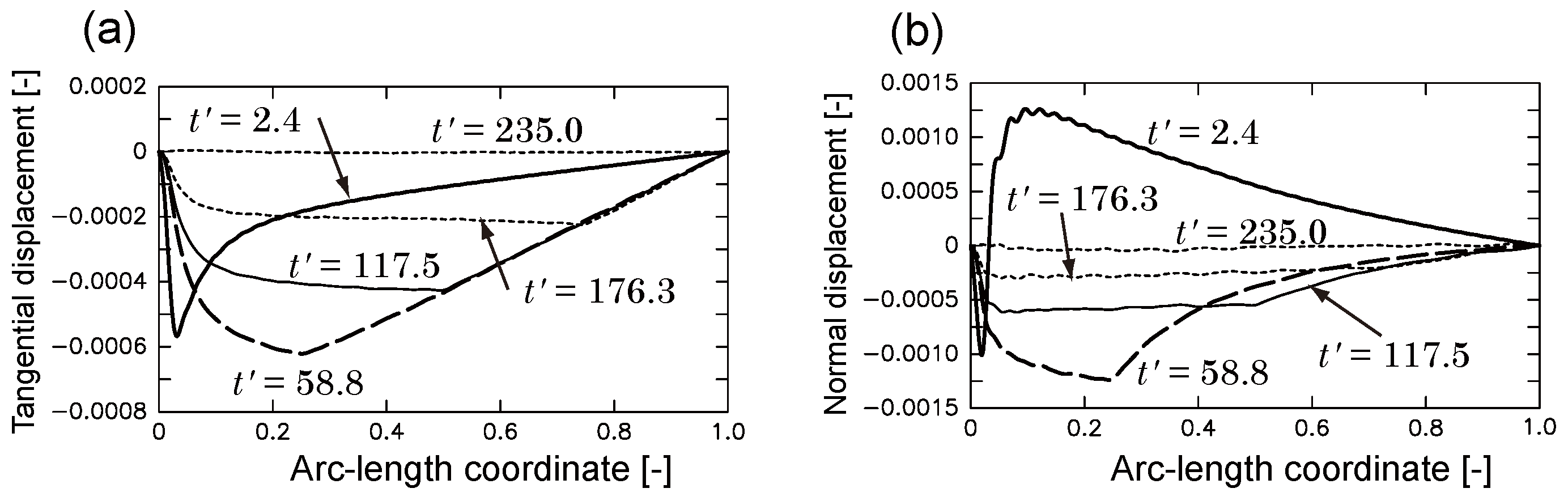
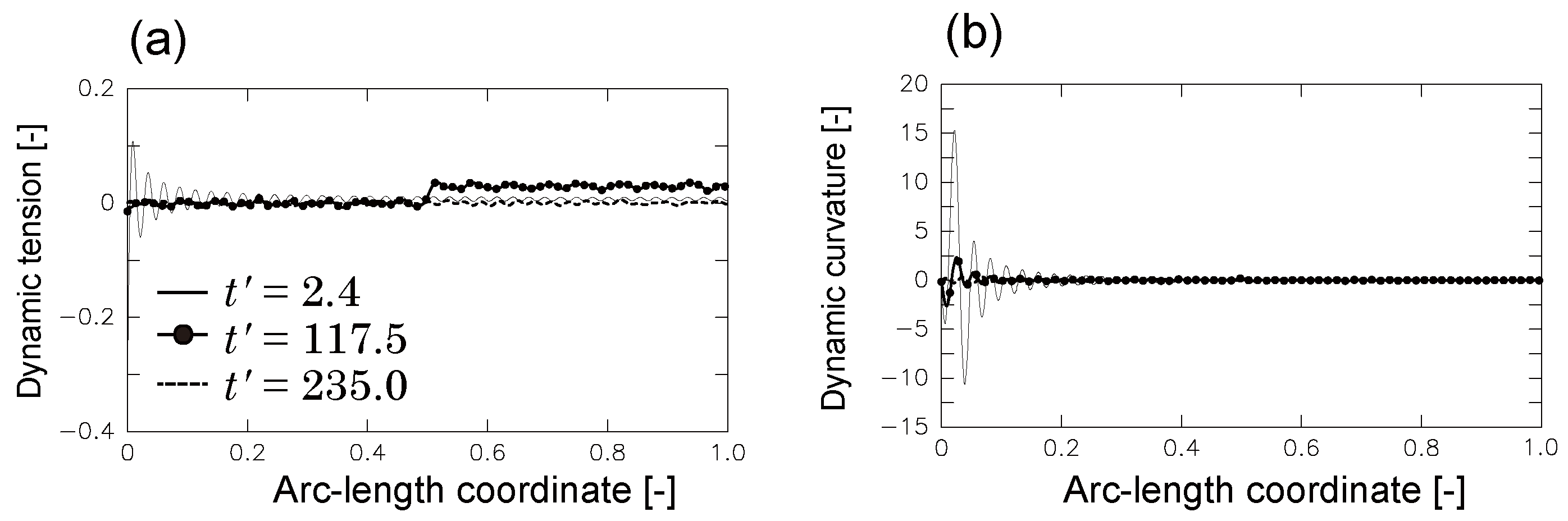
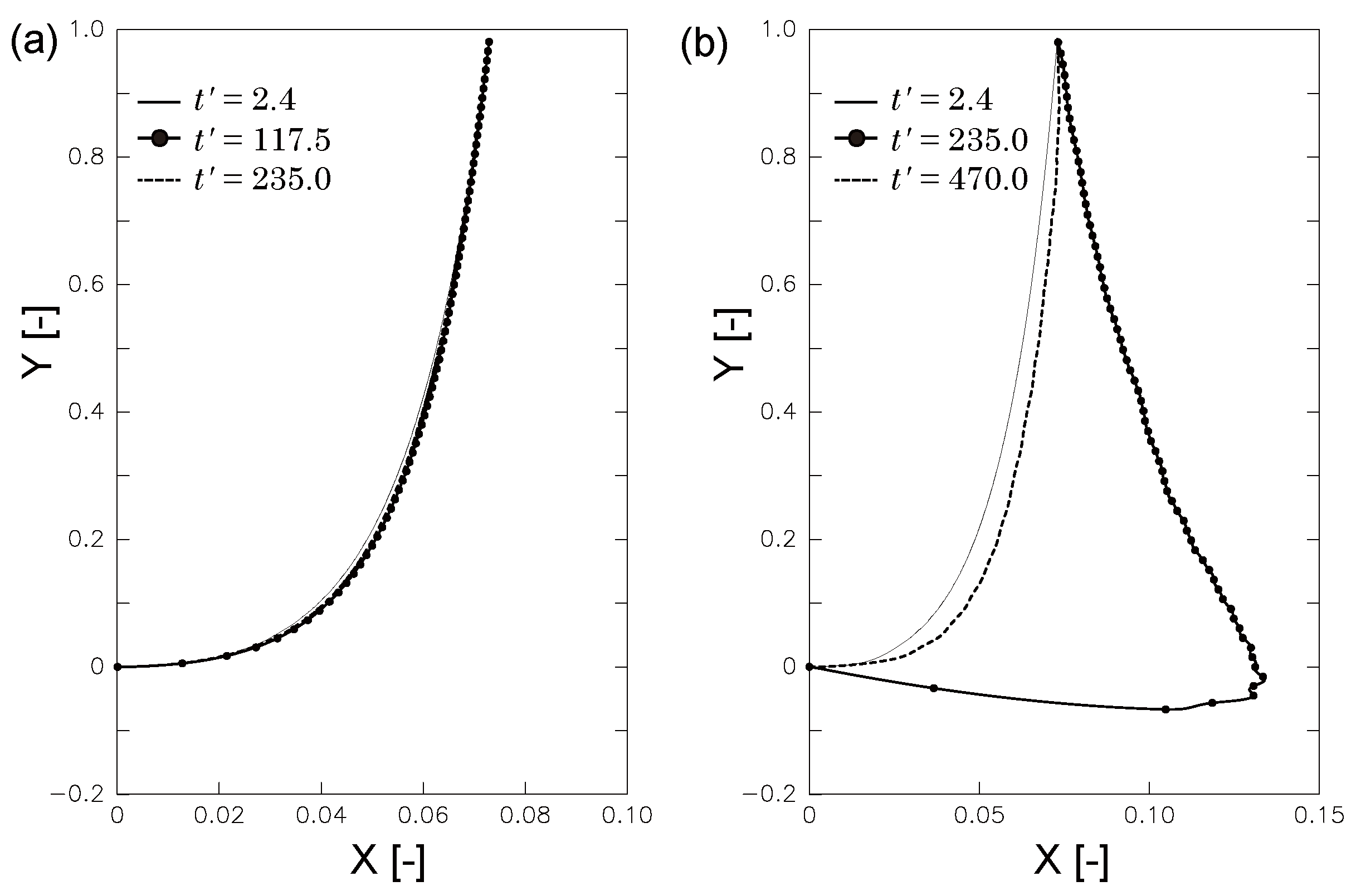
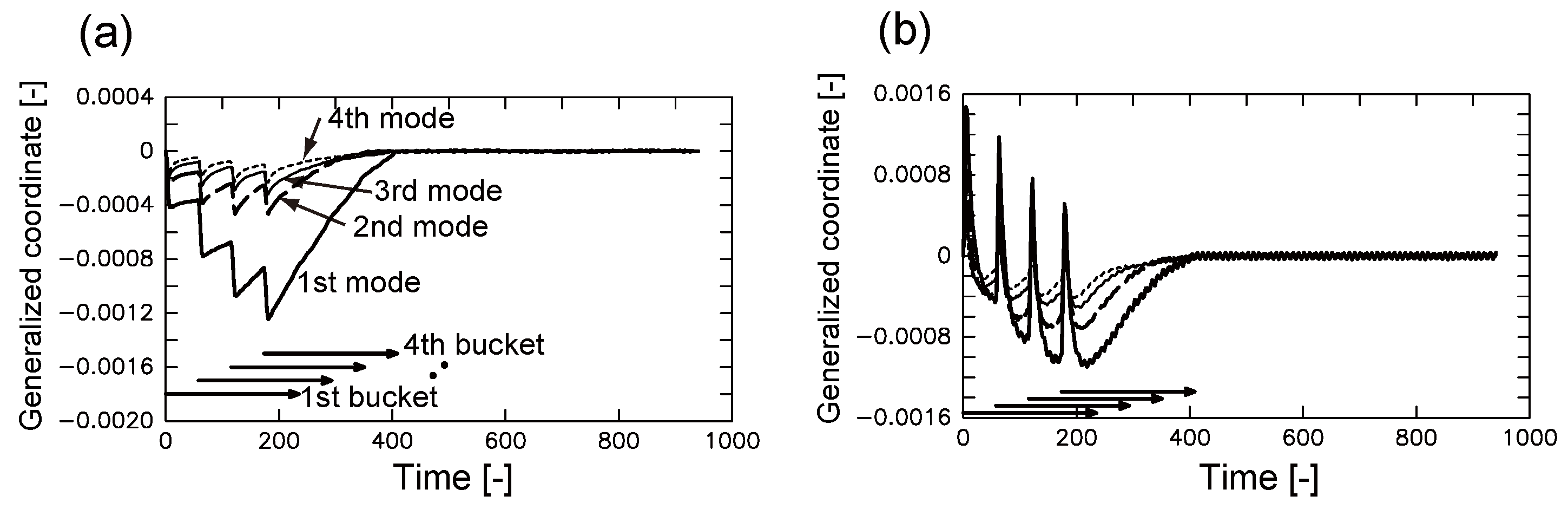
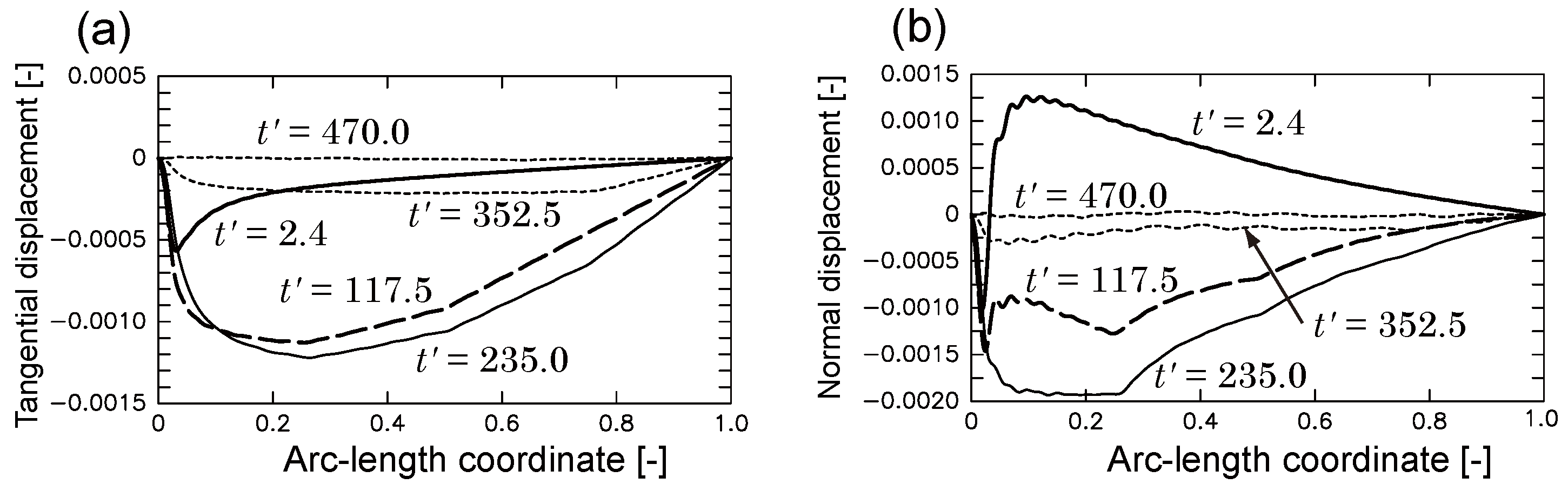
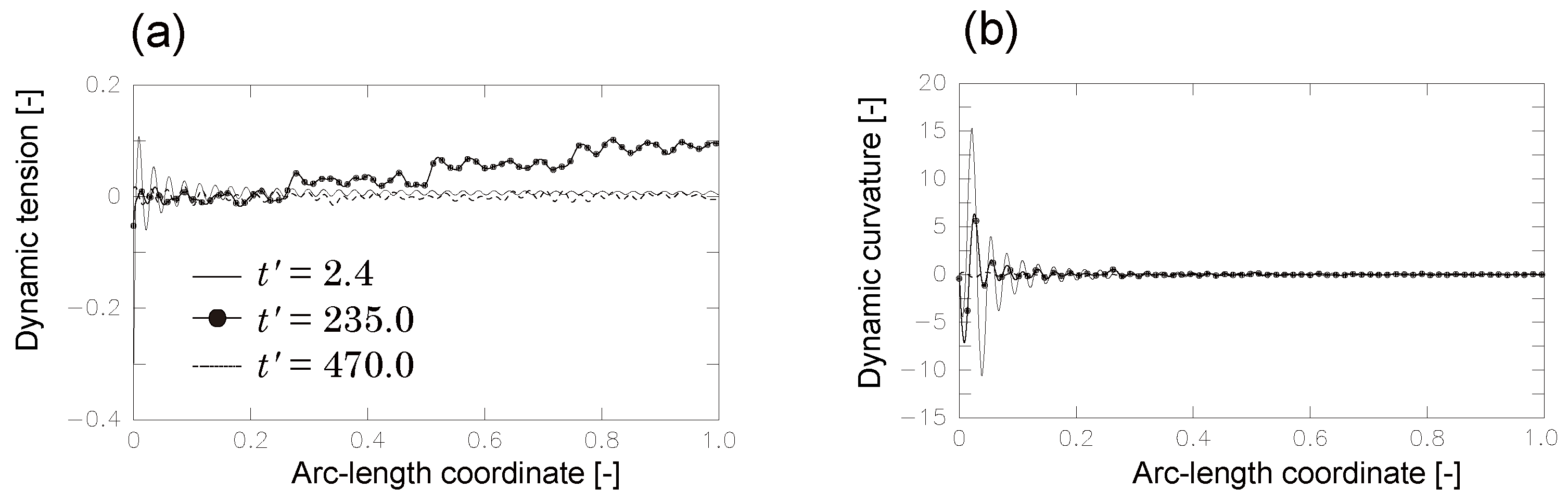
5.4. Response to Moving Load
5.4.1. One Bucket Case
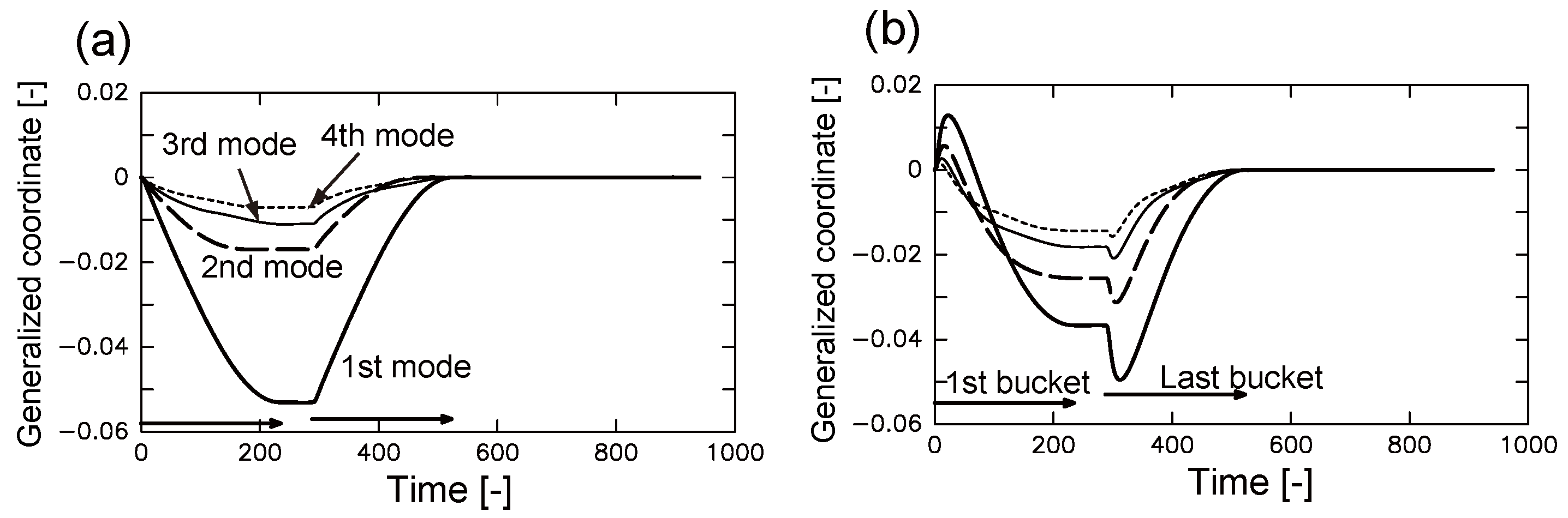
5.4.2. Four Buckets Case
5.4.3. 250 Buckets Case
5.4.4. Relation of In-Plane Deflection and the Design of CLB
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Chen, L.Q. Analysis and control of transverse vibrations of axially moving strings. Appl. Mech. Rev. 2005, 58, 91–116. [Google Scholar] [CrossRef]
- Chung, J.S. Deep-ocean mining technology: Development II. In Proceedings of the Sixth ISOPE Ocean Mining Symposium, Changsha, China, 9–13 October 2005. [Google Scholar]
- Masuda, Y.; Mero, J.L.; Cruickshank, M. Continuous bucket line dredging at 12,000 feet. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 19–21 April 1971; pp. 837–858. [Google Scholar]
- Masuda, Y.; Cruickshank, M.J. Mechanical design developments for a CLB mining system. In Proceedings of the Ocean Technologies and Opportunities in the Pacific for the 90’s (OCEANS’91), Honolulu, HI, USA, 1–3 October 1991; pp. 1583–1586. [Google Scholar]
- Jones, N.P.; Scanlan, R.H. Theory and full-bridge modeling of wind response of cable-supported bridges. J. Bridge Eng. 2001, 6, 365–375. [Google Scholar] [CrossRef]
- Rizzo, F.; Caracoglia, L.; Montelpare, S. Predicting the flutter speed of a pedestrian suspension bridge through examination of laboratory experimental errors. Eng. Struct. 2018, 172, 589–613. [Google Scholar] [CrossRef]
- Simpson, A. On the oscillatory motions of translating elastic cables. J. Sound Vib. 1972, 20, 177–189. [Google Scholar] [CrossRef]
- Triantafyllou, M.S. The dynamics of translating cables. J. Sound Vib. 1985, 103, 171–182. [Google Scholar] [CrossRef]
- Perkins, N.C.; Mote, C.D., Jr. Three-dimensional vibration of travelling elastic cables. J. Sound Vib. 1987, 114, 325–340. [Google Scholar] [CrossRef]
- Nishi, Y. Static analysis of axially moving cables applied for mining nodules on the deep sea floor. App. Ocean Res. 2012, 34, 45–51. [Google Scholar] [CrossRef]
- Nishi, Y. Determining the grounding length of an axially moving cable in a two-ship continuous line bucket system. Appl. Ocean Res. 2013, 40, 42–49. [Google Scholar] [CrossRef]
- Nishi, Y.; Yamai, T.; Ikeda, K. Two-belt continuous line bucket system: Its concept design and fundamental bucket motion experiments. Appl. Ocean Res. 2015, 53, 125–131. [Google Scholar] [CrossRef]
- Wickert, J.A.; Mote, C.D., Jr. Classical vibration analysis of axially moving continua. J. Appl. Mech. 1990, 57, 738–744. [Google Scholar] [CrossRef]
- Meirovitch, L. A new method of solution of the eigenvalue problem for gyroscopic systems. AIAA J. 1974, 12, 1337–1342. [Google Scholar] [CrossRef]
- Meirovitch, L. A modal analysis for the response of linear gyroscopic systems. J. Appl. Mech. 1975, 42, 446–450. [Google Scholar] [CrossRef]
- Swope, R.D.; Ames, W.F. Vibrations of moving threadline. J. Frankl. Inst. 1963, 275, 36–55. [Google Scholar] [CrossRef]
- Hildebr, F.B. Advanced Calculus for Applications, 2nd ed.; Prentice-Hall Inc.: Upper Saddle River, NJ, USA, 1976. [Google Scholar]
- Bliek, A. Dynamic Analysis of Single Span Cables. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1992. [Google Scholar]
- Wilson, J.F. Dynamics of Offshore Structures, 2nd ed.; John Wiley&Sons Inc.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Boas, M.L. Mathematical Methods in the Physical Sciences, 3rd ed.; John Wiley&Sons Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Zibdeh, H.S.; Rackwitz, R. Moving loads of beams with general boundary conditions. J. Sound Vib. 1996, 195, 85–102. [Google Scholar] [CrossRef]
- Meirovitch, L. Elements of Vibration Analysis, 2nd ed.; McGraw-Hill Inc.: New York, NY, USA, 1986. [Google Scholar]
- Canor, T.; Caracoglia, L.; Denoël, V. Application of random eigenvalue analysis to assess bridge flutter probability. J. Wind Eng. Ind. Aerod. 2015, 140, 79–86. [Google Scholar] [CrossRef] [Green Version]
- Schoefs, F.; Yáñz-Godoy, H.; Lanata, F. Polynomial chaos representation for identification of mechanical characteristics of instrumented structures. Comput-Aided Civ. Inf. Eng. 2011, 26, 173–189. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit | Definition |
|---|---|---|---|
| 0.1 | − | ||
| Normal damping coefficient | |||
| 0.1 | − | ||
| Tangential damping coefficient | |||
| N | Longitudinal stiffness | ||
| g | m s | Gravitational acceleration | |
| H | m | Water depth | |
| L | m | Entire cable length | |
| m | Cable mass per unit length | ||
| V | 0.60 | Velocity of axial motion | |
| - | Speed of axial motion | ||
| - | Longitudinal wave speed | ||
| - | Transverse wave speed | ||
| 0.30 | Underwater weight of bucket per unit longitudinal length | ||
| - | 500 | m | Bucket interval for the case with four buckets |
| - | m | Bucket interval for the case with 250 buckets |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Itoh, D.; Nishi, Y. Linear Analysis of the Static and Dynamic Responses of the Underwater Axially Moving Cables to Bucket Loads. J. Mar. Sci. Eng. 2019, 7, 301. https://doi.org/10.3390/jmse7090301
Itoh D, Nishi Y. Linear Analysis of the Static and Dynamic Responses of the Underwater Axially Moving Cables to Bucket Loads. Journal of Marine Science and Engineering. 2019; 7(9):301. https://doi.org/10.3390/jmse7090301
Chicago/Turabian StyleItoh, Daiki, and Yoshiki Nishi. 2019. "Linear Analysis of the Static and Dynamic Responses of the Underwater Axially Moving Cables to Bucket Loads" Journal of Marine Science and Engineering 7, no. 9: 301. https://doi.org/10.3390/jmse7090301