Prediction of Self-Propulsion Performance of Ship Model with Double L-Type Podded Propulsors and Conversion Method for Full-Scale Ship



Abstract
:1. Introduction
2. Materials and Methods
2.1. Model Parameters for Ship Model Self-Propulsion Performance Estimation
2.2. Boundary Conditions and Hull Meshing for Ship Model Self-Propulsion Performance Estimation
2.3. Calculation Results for Ship Model Self-Propulsion Performance
2.4. Methods for Performance Prediction of Full-Scale Podded Propulsors
2.4.1. Resistances of the Pod Hull and Bracket
2.4.2. Interference Resistance of the Pod Hull and Bracket
2.4.3. Additional Flow Resistance Caused by Wake Flow
2.5. Performance Conversion Method for A Full-Scale Ship with Double L-Type Podded Propulsors
3. Results and Discussion
3.1. Conversion of Self-Propulsion Performance for Full-Scale Double L-Type Podded Propeller
3.2. Numerical Calculation of the Self-Propulsion Performance for a Full-Scale Ship with Double Podded Propulsors
4. Conclusions
- (1)
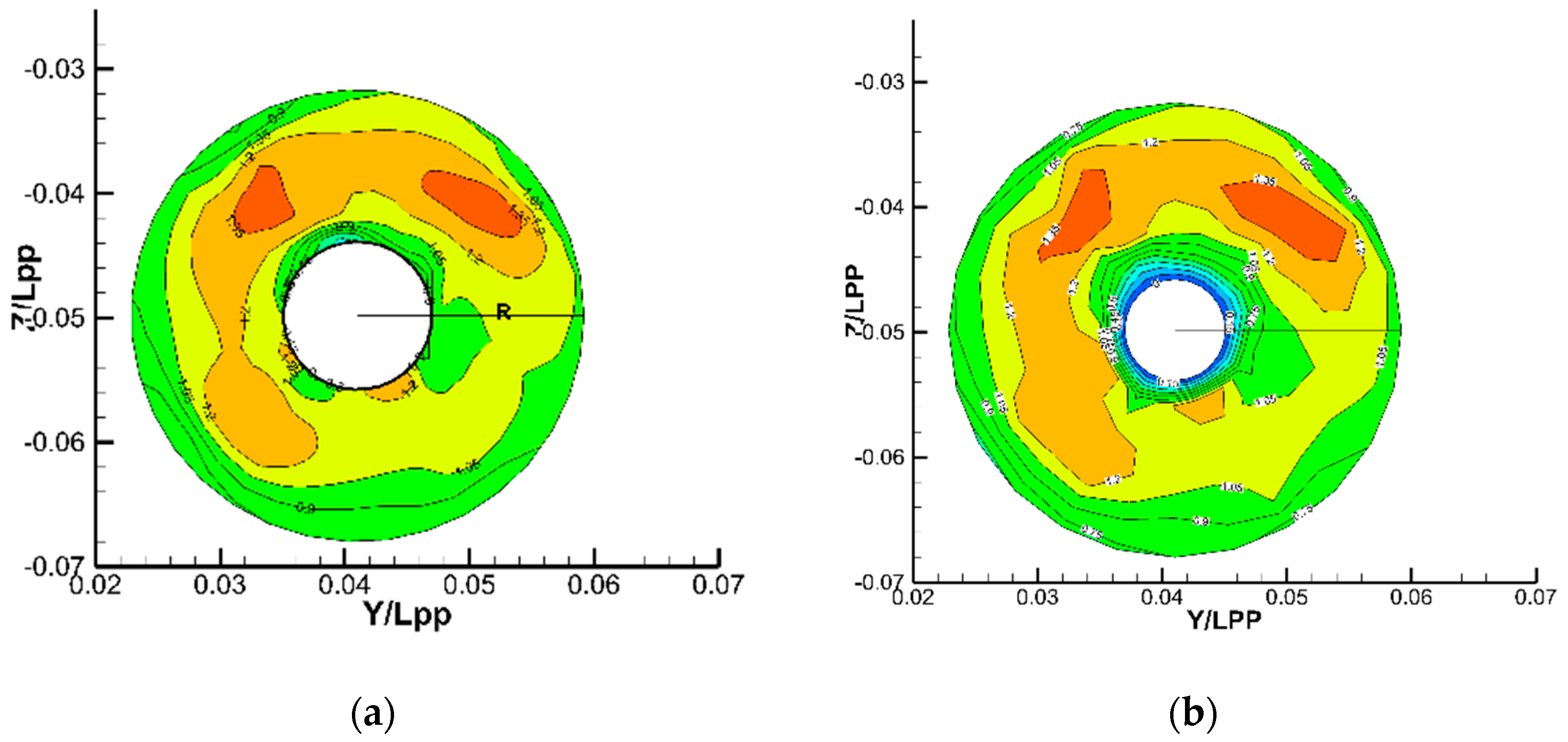
- The influence of dead wood on the wake flow at the stern of the ship improves the performance of the podded propeller.
- (2)
- The calculation results for the full-scale case indicate that the conversion method for the self-propelled double pods is feasible to some extent.
- (3)
- The Reynolds numbers of the full scale and model scale podded propulsors are quite different, resulting in a significant difference in the thicknesses of the boundary layer and dissimilarity of the flow fields near the wall.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lobachev, M.P.; TchitcherineL, A. The full-scale resistance estimation for podded propulsion system by RANS method. In Proceedings of the International Symposium on Ship Propulsion, St Petersburg, Russia, 19–21 June 2001; pp. 39–44. [Google Scholar]
- Chicherin, I.A.; Lobachev, M.P.; Pustoshny, A.V.; Sanchez, C.A. On a propulsion prediction procedure for ships with podded propulsors using RANS-code analysis. In Proceedings of the 1st International Conference on Technological Advances in Podded Propulsion; Atlar, M., Clarke, D., Glover, E.J., Sampson, R., Woodward, M., Eds.; University of Newcastle: Newcastle upon Tyne, UK, 2004; pp. 223–233. [Google Scholar]
- Sanchez-Caja, A.; Slaminen, E.; Rautaheimo, P.; Siikonen, T. Computation of the incompressible viscous-flow around a tractor thruster using a sliding-mesh technique. In Proceedings of the 7th International Conference on Numerical Ship Hydrodynamics, Nantes, France, 19–22 July 1999; pp. 1–12. [Google Scholar]
- Lee, S.K.; Chen, H.C. A coupled RANS/VLM approach for multi-component propulsor analysis. In Proceedings of the Propellers/Shafting’s 2003 Symposium, Virginia Beach, VA, USA, 17–18 September 2003; pp. 1–19. [Google Scholar]
- English, J.W. Propeller/Hull interaction. In Proceedings of the 14th International Towing Tank Conference, Ottawa, ON, Canada, September 1975. [Google Scholar]
- Streckwall, H.; Gatchell, S.; Tigges, K. A completer numerical model for podded propulsion. In Proceedings of the 9th Symposium on Practical Design of Ships and Other Floating Structures, Luebeck-Travemuende, Germany, 12–17 September 2004; pp. 1–6. [Google Scholar]
- Ohashi, K.; Hino, T. Numerical simulations of flows around a ship with podded propulsor. In Proceedings of the 1st International Conference on Technological Advances in Podded Propulsion; Atlar, M., Clarke, D., Glover, E.J., Sampson, R., Woodward, M., Eds.; University of Newcastle: Newcastle upon Tyne, UK, 2004; pp. 211–221. [Google Scholar]
- Kang, D. Study on Hydrodynamic Performance of Container Ship with Podded Propulsor Based on CFD Method. Master’s Thesis, Zhejiang University, Hangzhou, China, 2016. [Google Scholar]
- Chuang, Z. Using CFD Method to Research on the Hydrodynamic Performance of Podded Propulsor. Master’s Thesis, Harbin Engineering University, Harbin, China, 2009. [Google Scholar]
- Shamsi, R.; Ghassemi, H.; Iranmanesh, M. A Comparison of the BEM and RANS Calculations for the hydrodynamic performance of the PODS. Mech. Ind. 2017, 18, 205. [Google Scholar] [CrossRef]
- Shamsi, R.; Ghassemi, H. A BEM/RANS Coupled Method for Numerical Simulations of Podded Drive System. Modares Mech. Eng. 2017, 17, 65–76. [Google Scholar]
- The Specialist Committee on Azimuthing Podded Propulsion. In Proceedings of the 25th ITTC, Fukuoka, Japan, 14–20 September 2008. Final Report and Recommendations to the 25th ITTC.
- Ilkka, S.; Ahti, A. New type of dynamometers for pod-propulsor model tests. Marit. Res. News 2003, 17, 11. [Google Scholar]
- Wang, D.; Atlar, M.; Glover, E.J.; Paterson, I. Experimental investigation of flow field around a podded propulsor using LDA. In Proceedings of the 1st International Conference on Technological Advances in Podded Propulsion; Atlar, M., Clarke, D., Glover, E.J., Sampson, R., Woodward, M., Eds.; University of Newcastle: Newcastle upon Tyne, UK, 2004; pp. 483–498. [Google Scholar]
- Pustoshny, A.V.; Kaprantsev, S.V. Azipodded propeller blade cavitation observations during ship maneuvering. In Proceedings of the 4th Symposium on Cavitation, Pasadena, CA, USA, 20–23 June 2001. [Google Scholar]
- Friesch, J. Investigations of podded drivers in a large cavitation tunnel. In Proceedings of the PRADS 2001, Shanghai, China, 16–21 September 2001; pp. 749–756. [Google Scholar]
- Friesch, J. Cavitation and vibration investigations for podded drivers. In Proceedings of the 1st International Conference on Technological Advances in Podded Propulsion; Atlar, M., Clarke, D., Glover, E.J., Sampson, R., Woodward, M., Eds.; University of Newcastle: Newcastle upon Tyne, UK, 2004; pp. 387–399. [Google Scholar]
- Gierusz, W. Simulation model of the LNG carrier with podded propulsion, Part II: Full model and experimental results. Ocean Eng. 2016, 123, 28–44. [Google Scholar] [CrossRef]
- Pacuraru, F.; Lungu, A. Numerical Investigation on Ship Podded Propulsion. In Proceedings of the International Conference on Numerical Analysis and Applied Mathematics, Rhodes, Greece, 19–25 September 2010; Volume 1281, pp. 111–114. [Google Scholar]
- Hanninen, S.; Ojanen, M.; Uuskallio, A.; Vuorio, J. Recent development of podded propulsion in arctic shipping. In Proceedings of the 19th International Conference on Port and Ocean Engineering Under Arctic Conditions (POAC 2007), Dalian University of Technology, Dalian, China, 27–30 June 2007; pp. 469–481. [Google Scholar]
- Report of Resistance Committee. In Proceedings of the 15th ITTC, Hague, The Netherlands, 3–10 September 1978.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length overall Loa (m) | 122.5 |
| Length between perpendiculars Lpp (m) | 117.0 |
| Molded breadth B (m) | 22 |
| Molded depth D (m) | 11.8 |
| Design draught T (m) | 8.0 |
| Wetted surface area S (m2) | 350 |
| Contracted scale | 17.708 |
| Parameter | Value |
|---|---|
| Bracket angle (°) | 60 |
| Overall length of the pod (m) | 0.473 |
| Maximum radius of the pod (m) | 0.049 |
| Number of blades | 4 |
| Diameter of propeller (m) | 0.240 |
| Pitch ratio (0.7 R) | 1.284 |
| Number of Grid Cells (×10,000) | Value of y+ max | Resistance Value (KN) | |
|---|---|---|---|
| 1 | 112 | 764 | 50.583 |
| 2 | 156 | 585 | 41.857 |
| 3 | 220 | 432 | 35.285 |
| 4 | 345 | 224 | 33.852 |
| 5 | 552 | 119 | 33.322 |
| 6 | 753 | 78 | 33.315 |
| VS | NS | TS | QS | PE | PDS | |
| (kn) | (rps) | (rpm) | (KN) | (KNm) | (KW) | (KW) |
| 4 | 0.543 | 32.586 | 49.182 | 17.880 | 70.323 | 61.015 |
| 6 | 0.876 | 52.547 | 120.237 | 49.355 | 263.170 | 271.583 |
| 8 | 1.089 | 65.331 | 185.010 | 76.753 | 533.352 | 525.099 |
| 10 | 1.306 | 78.374 | 267.041 | 111.881 | 953.825 | 918.241 |
| 12 | 1.594 | 95.635 | 395.021 | 163.862 | 1676.243 | 1641.060 |
| 14 | 1.945 | 116.710 | 588.609 | 243.019 | 2918.287 | 2970.138 |
| 16 | 2.299 | 137.957 | 818.460 | 345.813 | 4979.976 | 4995.888 |
| 18 | 2.780 | 166.790 | 1201.100 | 480.019 | 8250.330 | 8384.083 |
| VS | KTS/JS2 | JS | tS | ωS | ηPs | ηHs |
| (kn) | ||||||
| 4 | 0.9297 | 0.711 | 0.305 | 0.2252 | 0.647 | 0.897 |
| 6 | 0.9249 | 0.712 | 0.290 | 0.1930 | 0.567 | 0.879 |
| 8 | 0.9145 | 0.714 | 0.299 | 0.2305 | 0.569 | 0.911 |
| 10 | 0.9211 | 0.713 | 0.305 | 0.2542 | 0.568 | 0.932 |
| 12 | 0.9064 | 0.716 | 0.312 | 0.2447 | 0.571 | 0.911 |
| 14 | 0.9074 | 0.716 | 0.311 | 0.2186 | 0.571 | 0.882 |
| 16 | 0.8967 | 0.718 | 0.260 | 0.1805 | 0.573 | 0.903 |
| 18 | 0.906 | 0.716 | 0.258 | 0.1360 | 0.571 | 0.859 |
| VS | ηRs | ηUs | NT | PDT | ||
| (kn) | (rps) | (rpm) | (KW) | (hp) | ||
| 4 | 0.994 | 0.576 | 0.543 | 32.586 | 61.015 | 83.013 |
| 6 | 0.971 | 0.485 | 0.876 | 52.547 | 271.583 | 369.501 |
| 8 | 0.979 | 0.508 | 1.089 | 65.331 | 525.099 | 714.420 |
| 10 | 0.980 | 0.519 | 1.306 | 78.374 | 918.241 | 1249.307 |
| 12 | 0.982 | 0.511 | 1.594 | 95.635 | 1641.060 | 2232.735 |
| 14 | 0.976 | 0.491 | 1.945 | 116.710 | 2970.138 | 4041.005 |
| 16 | 0.963 | 0.498 | 2.299 | 137.957 | 4995.888 | 6797.126 |
| 18 | 1.002 | 0.492 | 2.780 | 166.790 | 8384.083 | 11,406.915 |
| Number of Grid Cells (×10,000) | Value of y+ max | Resistance Value (KN) | |
|---|---|---|---|
| 1 | 1000 | 628 | 178.952 |
| 2 | 1200 | 573 | 206.324 |
| 3 | 1500 | 381 | 237.561 |
| 4 | 1980 | 234 | 256.853 |
| 5 | 2200 | 112 | 265.385 |
| Rs (KN) | Ns (rps) | Ts (KN) | Qs (KNm) | |
|---|---|---|---|---|
| Cal-Real | 256.853 | 1.555 | 341.218 | 142.450 |
| EXP-Model | 271.715 | 1.594 | 395.021 | 163.863 |
| ε/% | 5.79 | 2.51 | 15.77 | 15.03 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Guo, C.; Lin, J.; Zhang, Z.; Bai, X. Prediction of Self-Propulsion Performance of Ship Model with Double L-Type Podded Propulsors and Conversion Method for Full-Scale Ship. J. Mar. Sci. Eng. 2019, 7, 162. https://doi.org/10.3390/jmse7050162
Zhao D, Guo C, Lin J, Zhang Z, Bai X. Prediction of Self-Propulsion Performance of Ship Model with Double L-Type Podded Propulsors and Conversion Method for Full-Scale Ship. Journal of Marine Science and Engineering. 2019; 7(5):162. https://doi.org/10.3390/jmse7050162
Chicago/Turabian StyleZhao, Dagang, Chunyu Guo, Jianfeng Lin, Zuotian Zhang, and Xue Bai. 2019. "Prediction of Self-Propulsion Performance of Ship Model with Double L-Type Podded Propulsors and Conversion Method for Full-Scale Ship" Journal of Marine Science and Engineering 7, no. 5: 162. https://doi.org/10.3390/jmse7050162