HAMS: A Frequency-Domain Preprocessor for Wave-Structure Interactions—Theory, Development, and Application


Abstract
:1. Introduction
2. Theory and Algorithm
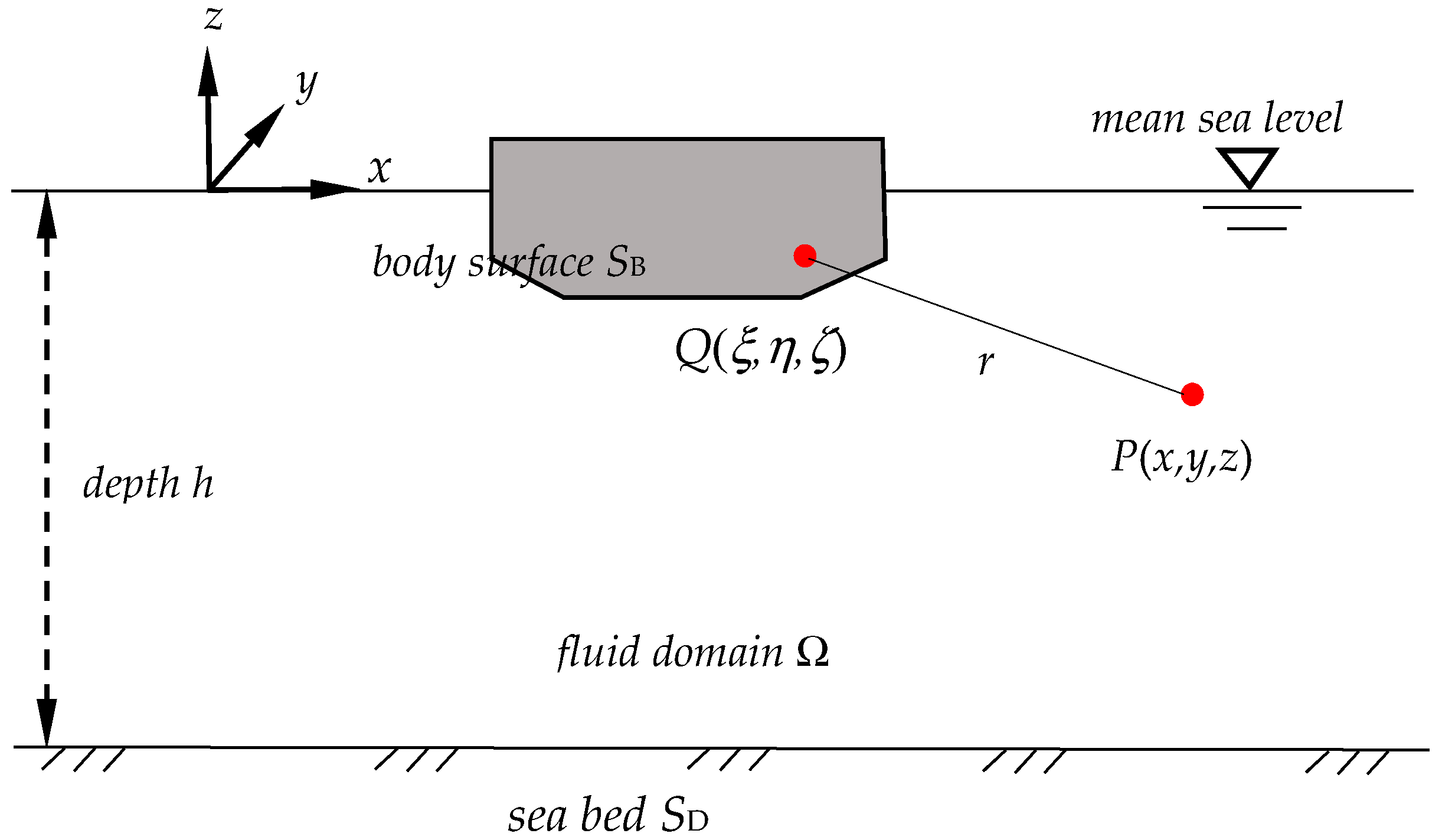
2.1. Governing Equation and Boundary Conditions
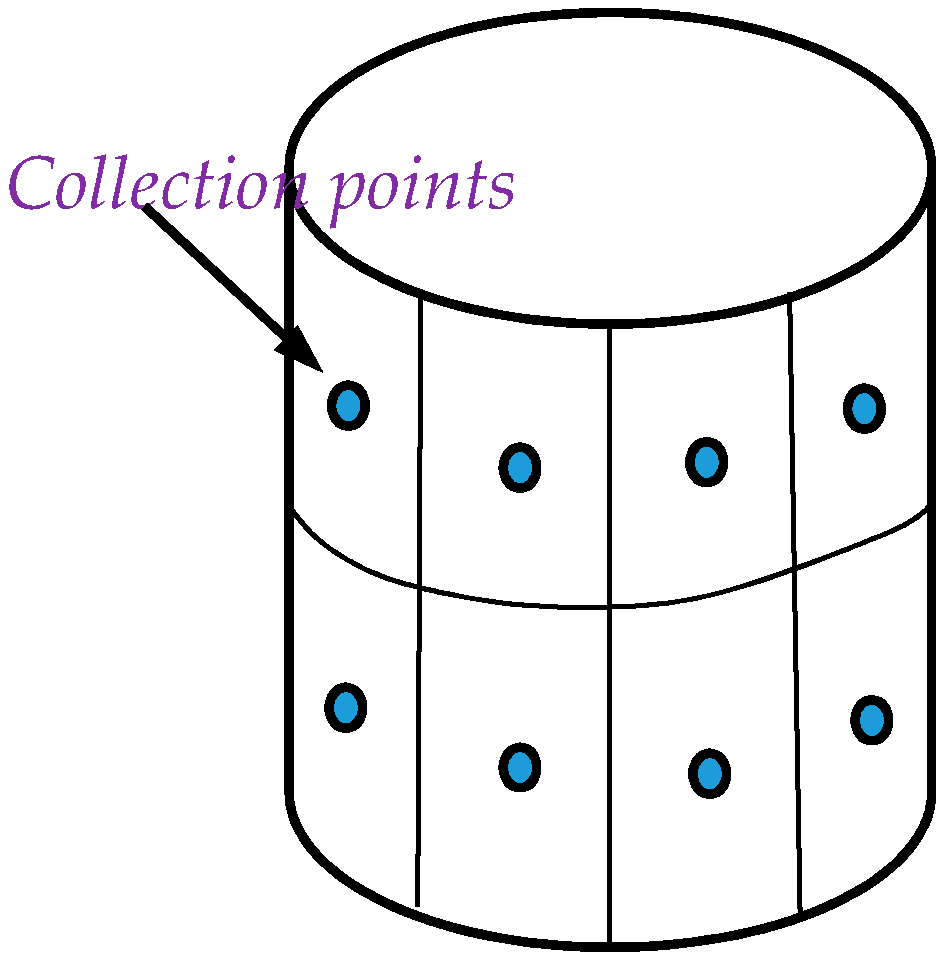
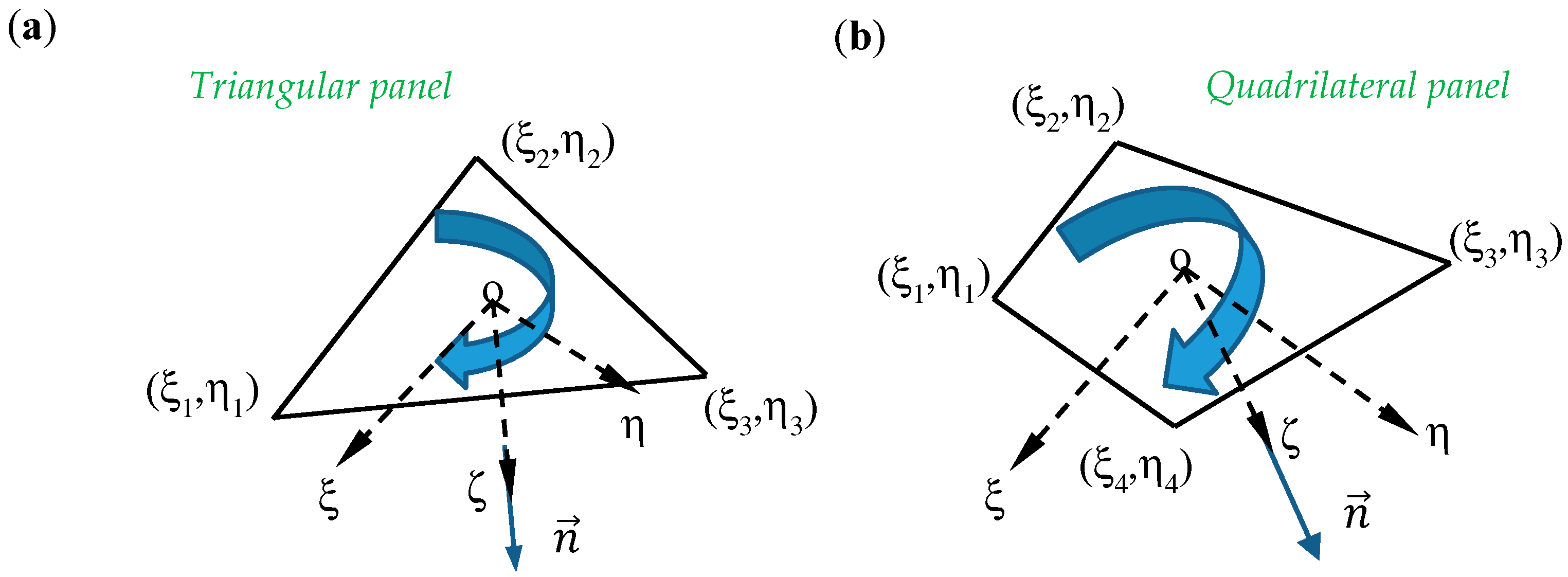
2.2. Mixed Source/Dipole Formulation and Discretization of the Integral Equations
2.3. Evaluation of Green’s Function and Self-Influences
2.4. Solution of the Linear Algebraic System
3. Numerical Techniques in Specialized Topics
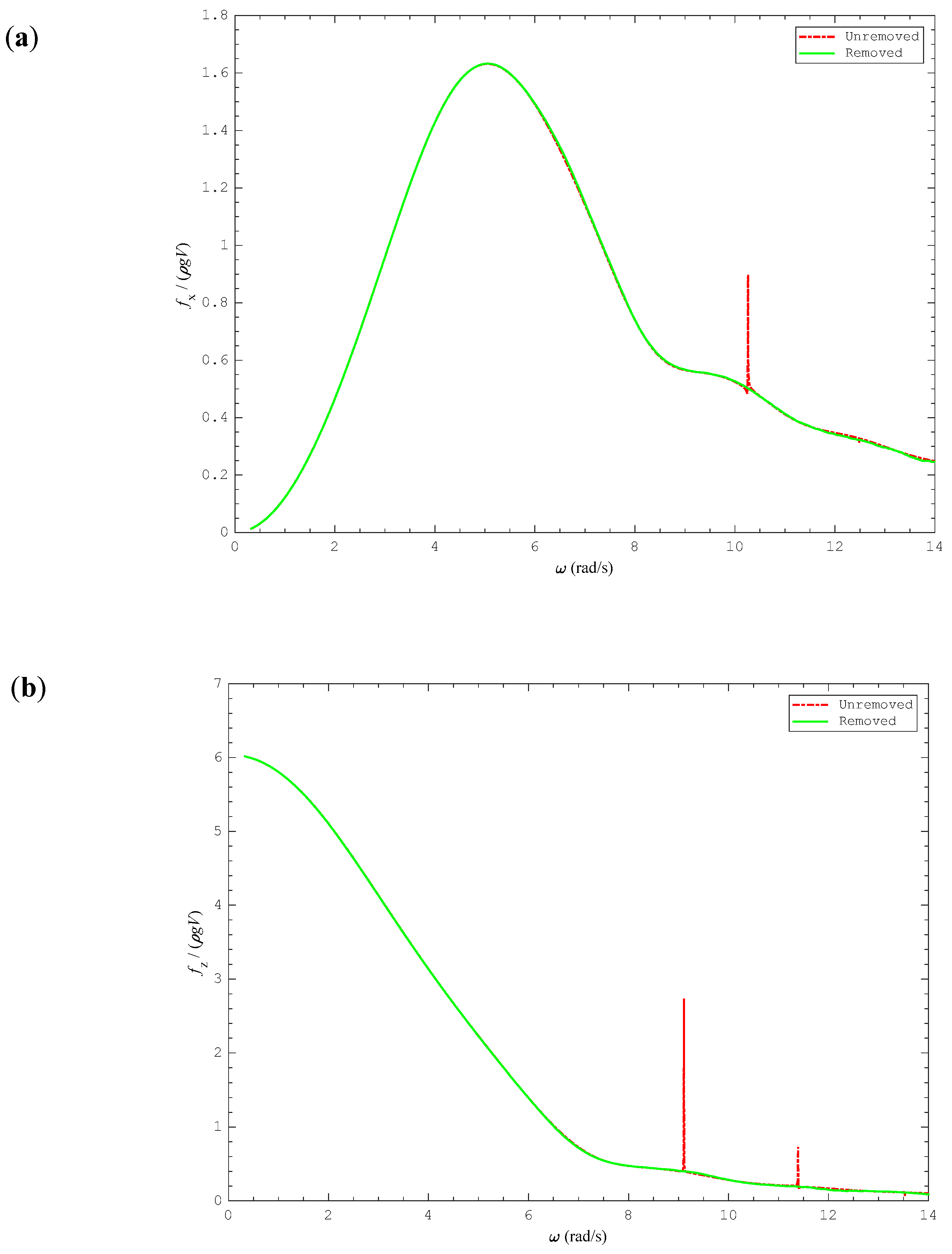
3.1. Removal of Irregular Frequencies
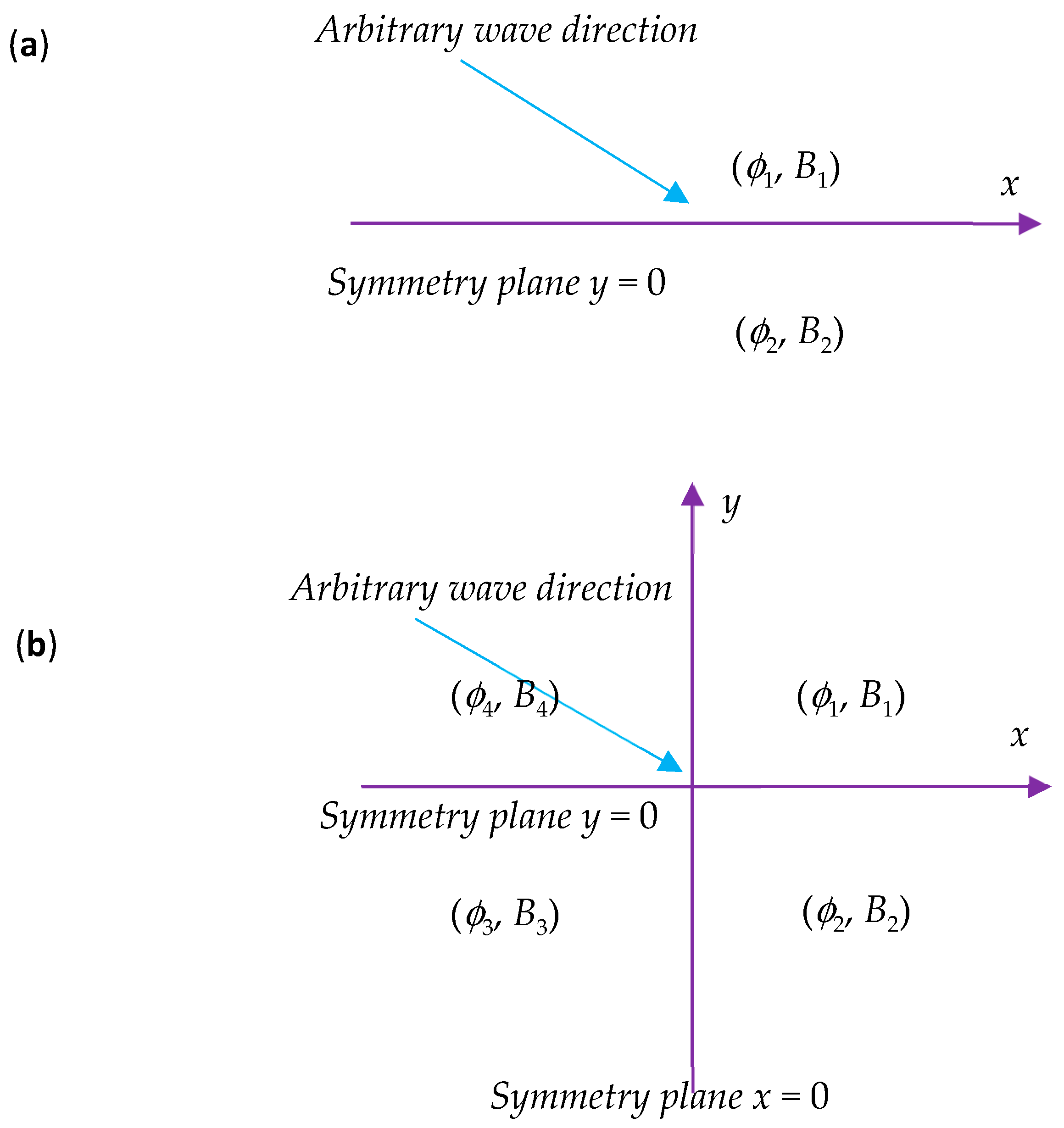
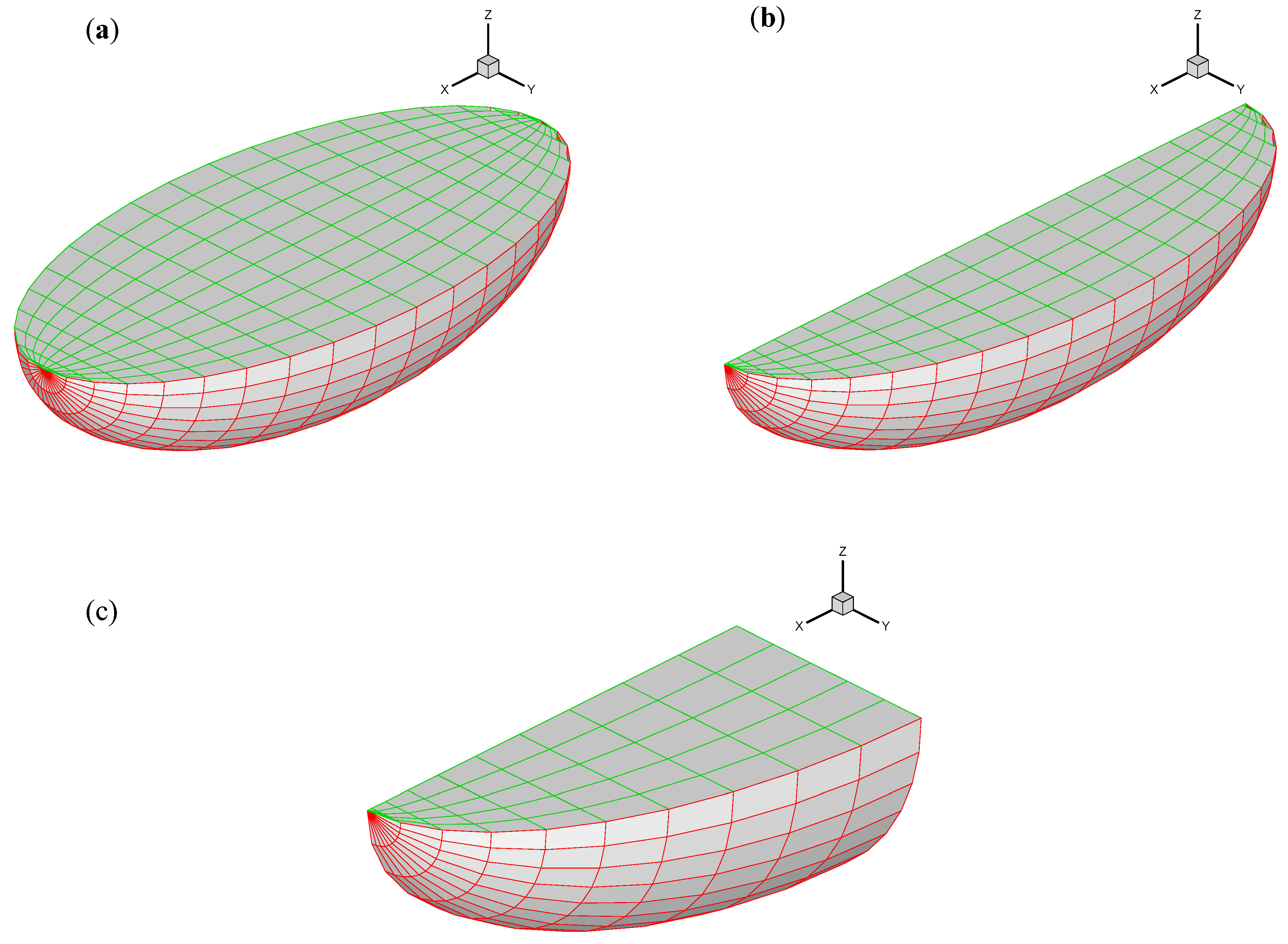
3.2. Exploitation of Symmetrical Properties
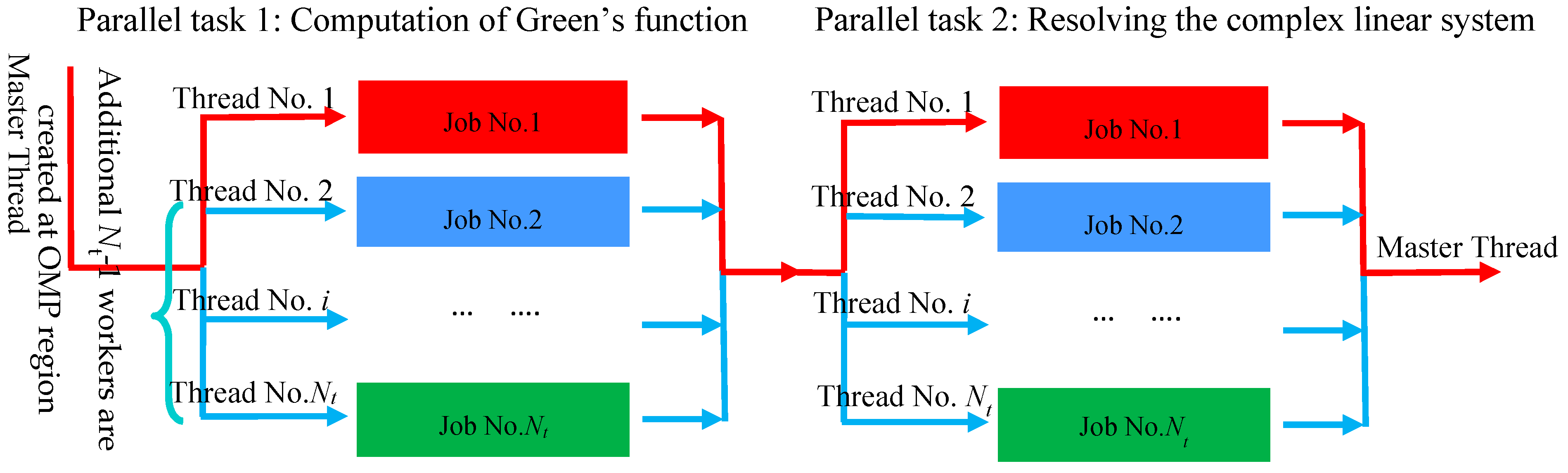
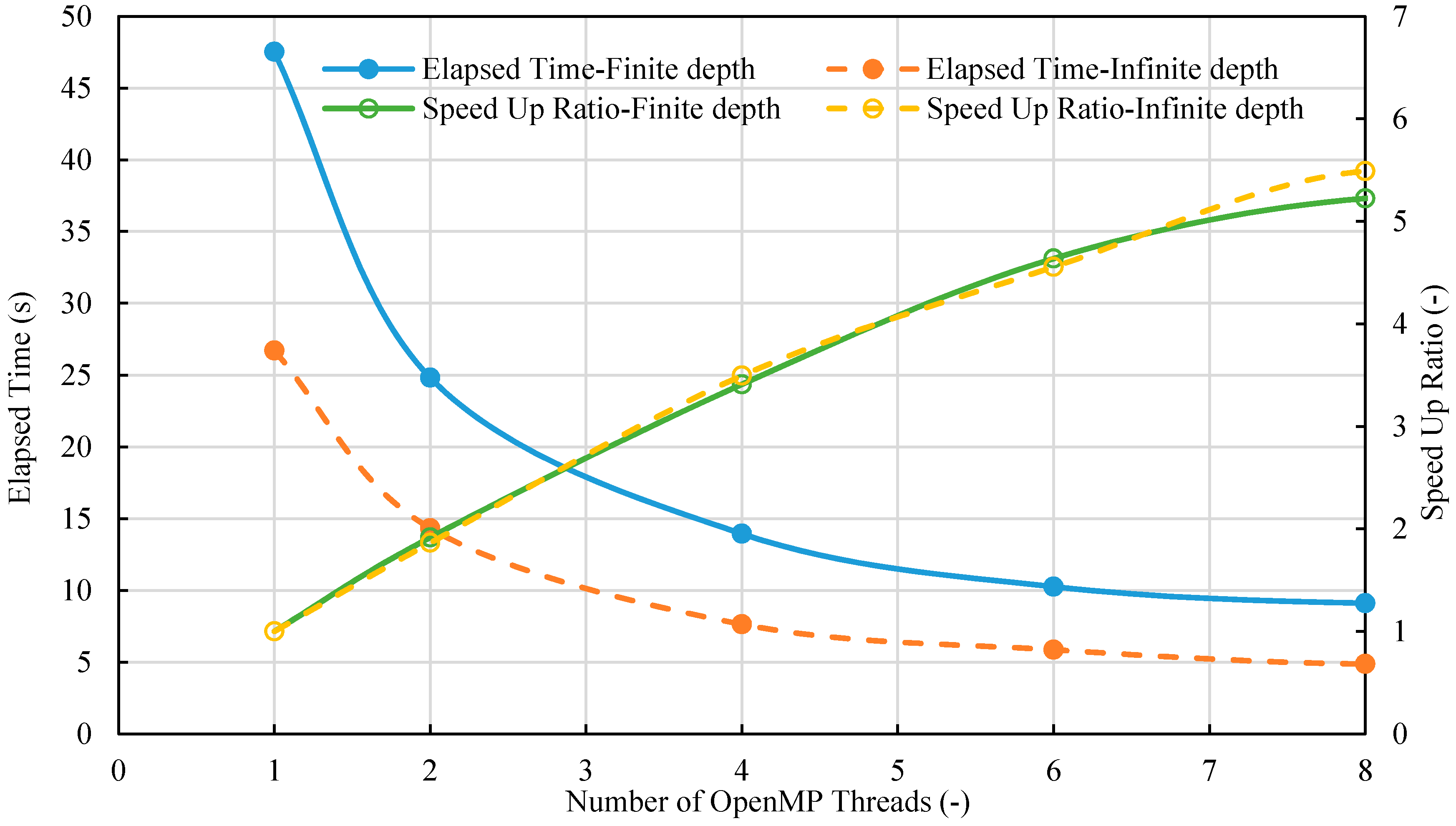
3.3. OpenMP Parallelization on Multi-core Machines
4. Applications to Waves–Structure Interactions
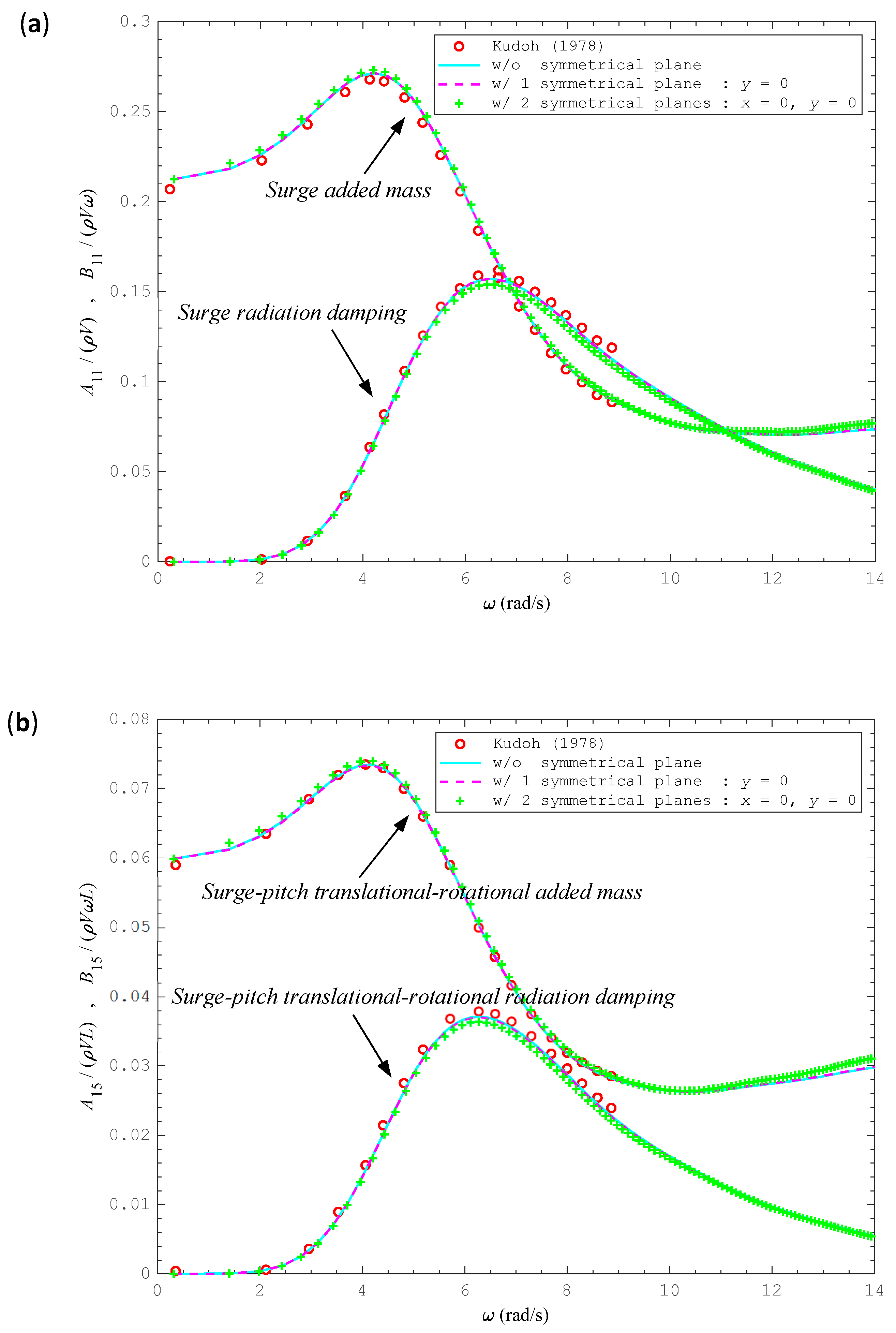
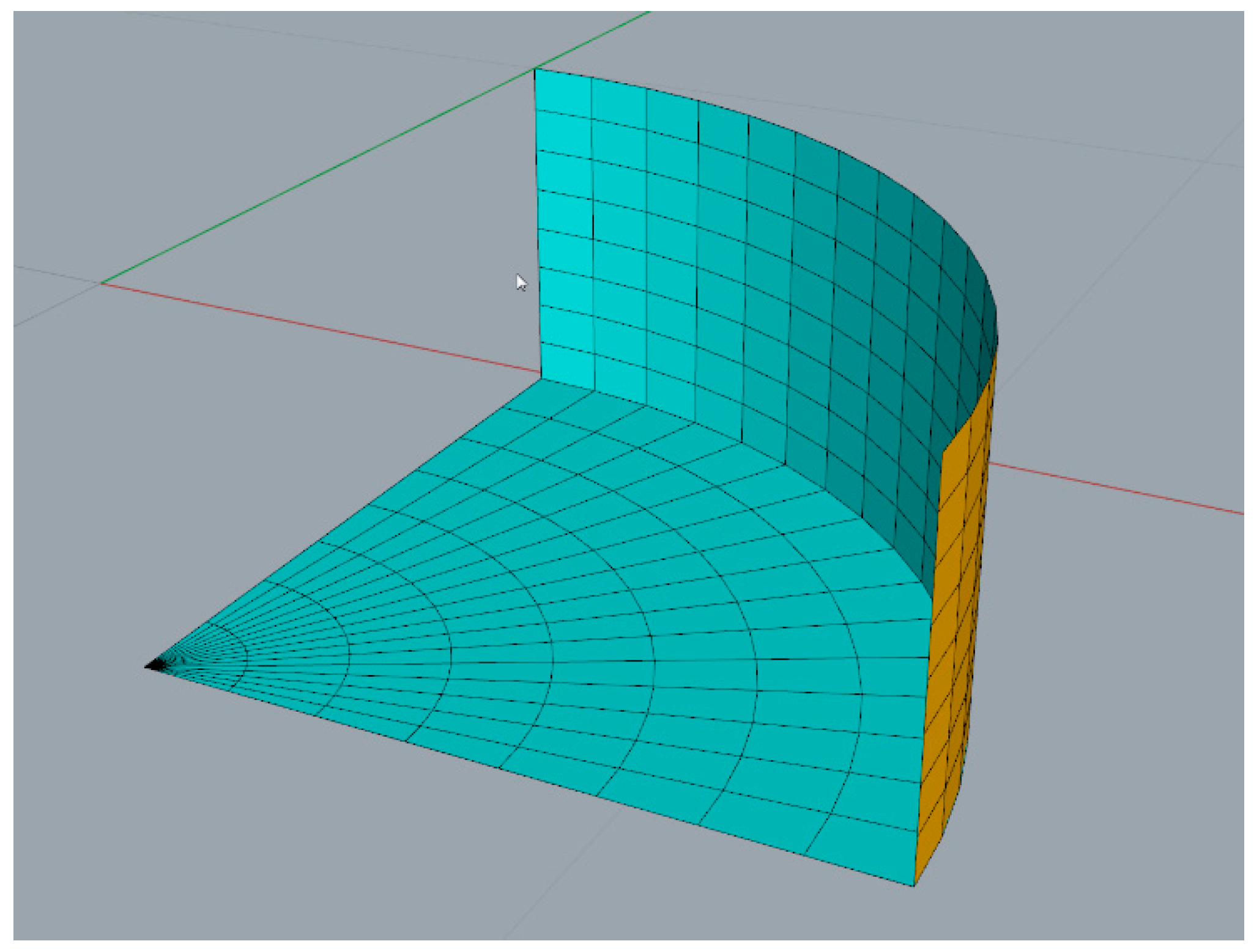
4.1. Computation of an Analytical Geometry for Verification
4.2. Computation of a Truncated Circular Cylinder
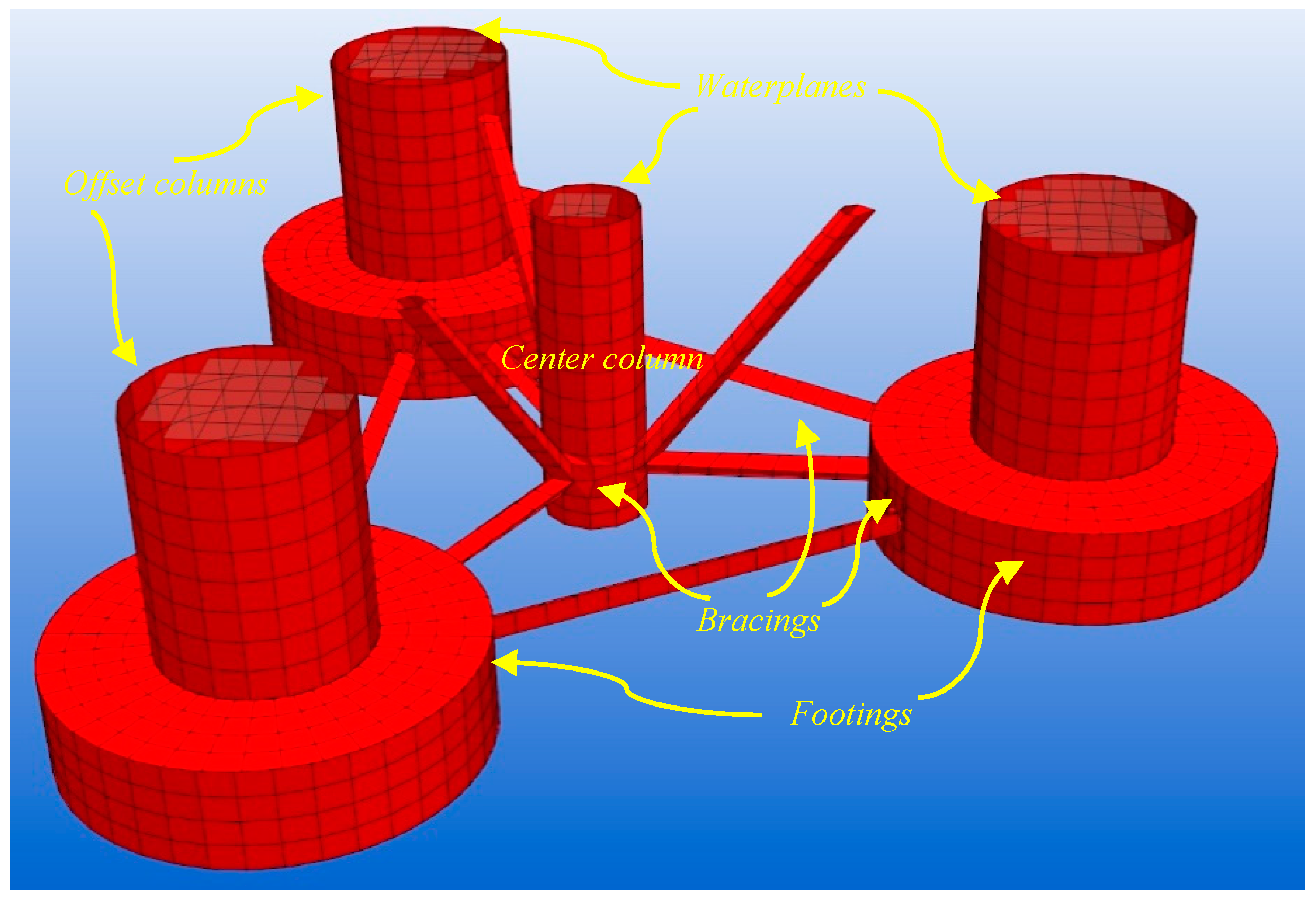
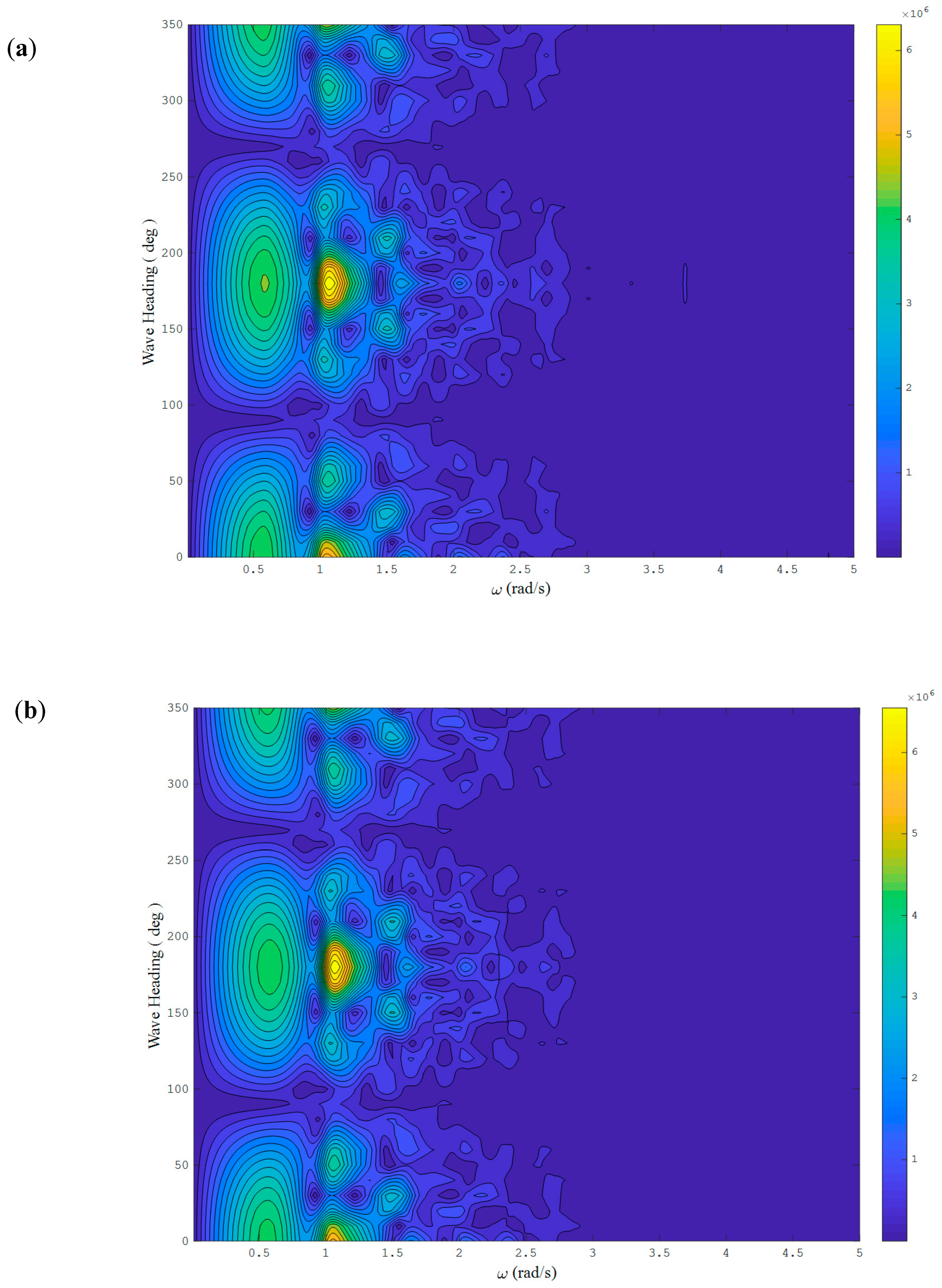
4.3. Computation of a Complex Marine Structure
5. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Instructions for the software acquisition
Nomenclature
| API | Application Programming Interface |
| BIEM | Boundary Integral Equation Method |
| CFD | Computational Fluid Dynamics |
| GMRES | Generalized Minimum Residual |
| JONSWAP | Joint North Sea Wave Observation Project |
| LU | Lower–Upper |
| N-S | Navier-Stokes |
| OpenMP | Open Multi-Processing |
| RAO | Response Amplitude Operator |
References
- Li, Y.; Yu, Y.H. A synthesis of numerical methods for modeling wave energy converter-point absorbers. Renew. Sustain. Energy Rev. 2012, 16, 4352–4364. [Google Scholar] [CrossRef]
- Li, Y.; Teng, B. Wave Action on Maritime Structures, 3rd ed.; Ocean Press: Beijing, China, 2015. [Google Scholar]
- Newman, J.N. Algorithms for free-surface Green function. J. Eng. Math. 1985, 19, 57–67. [Google Scholar] [CrossRef]
- Newman, J.N. The approximation of free-surface Green functions. In Wave Asymptotics; Retirement Meeting for Professor Fritz Ursell, University of Manchester; Martin, P.A., Wickham, G.R., Eds.; Cambridge University Press: Cambridge, UK, 1992; pp. 107–135. [Google Scholar]
- Telste, J.G.; Noblesse, F. Numerical evaluation of the Green function of water-wave radiation and diffraction. J. Ship Res. 1986, 30, 69–84. [Google Scholar]
- Wu, H.; Zhang, C.; Zhu, Y.; Li, W.; Wan, D.; Noblesse, F. A global approximation to the Green function for diffraction radiation of water waves. Eur. J. Mech.-B/Fluids 2017, 65, 54–64. [Google Scholar] [CrossRef]
- Chen, X.B. Evaluation de la fonction de Green du probleme de diffraction/radiation en profondeur d’eau finie-une nouvelle méthode rapide et précise, Actes des 4e Journées de l’Hydrodynamique. Nantes (Franc.) 1993, 371–384. [Google Scholar]
- Chen, X.B. Hydrodynamics in offshore and naval applications—Part I. In Proceedings of the 6th International Conference on Hydrodynamics, Perth, Australia, 24–26 November 2004. [Google Scholar]
- Liu, Y.; Iwashita, H.; Hu, C. A calculation method for finite depth free-surface green function. International. J. Nav. Archit. Ocean Eng. 2015, 7, 375–389. [Google Scholar] [CrossRef]
- Liu, Y.; Yoshida, S.; Hu, C.; Sueyoshi, M.; Sun, L.; Gao, J.; Cong, P.; He, G. A reliable open-source package for performance evaluation of floating renewable energy systems in coastal and offshore regions. Energy Convers. Manag. 2018, 174, 516–536. [Google Scholar] [CrossRef]
- Saad, Y.; Schultz, M.H. GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef]
- John, F. On the motion of floating bodies II. Commun. Pure Appl. Math. 1950, 3, 45–101. [Google Scholar] [CrossRef]
- Ursell, F. Irregular frequencies and the motion of floating bodies. J. Fluid Mech. 1981, 105, 143–156. [Google Scholar] [CrossRef]
- Lee, C.H.; Sclavounos, P.D. Removing the irregular frequencies from integral equations in wave-body interactions. J. Fluid Mech. 1989, 207, 393–418. [Google Scholar] [CrossRef]
- Lee, C.H.; Newman, J.N.; Zhu, X. An extended boundary integral equation method for the removal of irregular frequency effects. Int. J. Numer. Methods Fluids 1996, 23, 637–660. [Google Scholar] [CrossRef]
- Malenica, S.; Chen, X.B. On the irregular frequencies appearing in wave diffraction-radiation solutions. Int. J. Offshore Polar Eng. 1998, 8, 110–114. [Google Scholar]
- Sun, L.; Teng, B.; Liu, C.F. Removing irregular frequencies by a partial discontinuous higher order boundary element method. Ocean Eng. 2008, 35, 920–930. [Google Scholar] [CrossRef] [Green Version]
- Kashiwagi, M.; Takagi, K.; Yoshida, H.; Murai, M.; Higo, Y. Fluid Dynamics of Floating Bodies in Practice: Part 1 Numerical Computation Method of the Motion Response Problems; Seisando Press: Tokyo, Japan, 2003. [Google Scholar]
- Newman, J.N. Distributions of sources and normal dipoles over a quadrilateral panel. J. Eng. Math. 1986, 20, 113–126. [Google Scholar] [CrossRef]
- Lau, S.M.; Hearn, G.E. Suppression of irregular frequency effects in fluid–structure interaction problems using a combined boundary integral equation method. Int. J. Numer. Methods Fluids 1989, 9, 763–782. [Google Scholar] [CrossRef]
- Lee, C.H. WAMIT Theory Manual: MIT Report 95-2; Dept. of Ocean Engineering, Massachusetts Institute of Technology: Cambridge, MA, USA, 1995. [Google Scholar]
- Chau, F.P. The Second Order Velocity Potential for Diffraction of Waves by Fixed Offshore Structures. Ph.D. Thesis, University College London, London, UK, 1989. [Google Scholar]
- Matsui, T.; Kato, K.; Shirai, T. A hybrid integral equation method for diffraction and radiation of water waves by three-dimensional bodies. Comput. Mech. 1987, 2, 119–135. [Google Scholar] [CrossRef]
- Kiessling, A. An Introduction to Parallel Programming with OpenMP. In A Pedagogical Seminar; Edinburgh University: Edinburgh, UK, 2009. [Google Scholar]
- Kudou, K.; Kobayashi, K. The drifting force acting on a three-dimensional body in waves (2nd Report). J. Soc. Nav. Arch. Jap. 1978, 144, 155–162. [Google Scholar] [CrossRef]
- Robertson, A.; Jonkman, J.M.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2014. [Google Scholar]
- McCormick, M.E. Ocean Engineering Mechanics: With Applications; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A11 (kg) | B11 (kg/s) | |||||
|---|---|---|---|---|---|---|
| ω | HAMS | WAMIT® | Hydrostar® | HAMS | WAMIT® | Hydrostar® |
| 0.2 | 6.7543 × 102 | 6.7568 × 102 | 6.9207 × 102 | 1.7266 × 10−5 | 1.7268 × 10−5 | 1.8018 × 10−5 |
| 0.4 | 6.7910 × 102 | 6.7936 × 102 | 6.9587 × 102 | 2.2008 × 10−3 | 2.2011 × 10−3 | 2.2972 × 10−3 |
| 0.6 | 6.8554 × 102 | 6.8579 × 102 | 7.0252 × 102 | 3.7342 × 10−2 | 3.7344 × 10−2 | 3.8977 × 10−2 |
| 0.8 | 6.9525 × 102 | 6.9549 × 102 | 7.1257 × 102 | 2.7704 × 10−1 | 2.7705 × 10−1 | 2.8915 × 10−1 |
| 1 | 7.0898 × 102 | 7.0922 × 102 | 7.2679 × 102 | 1.3046 × 100 | 1.3046 × 100 | 1.3616 × 100 |
| 1.2 | 7.2764 × 102 | 7.2788 × 102 | 7.4612 × 102 | 4.6032 × 100 | 4.6031 × 100 | 4.8047 × 100 |
| 1.4 | 7.5214 × 102 | 7.5238 × 102 | 7.7152 × 102 | 1.3292 × 101 | 1.3291 × 101 | 1.3876 × 101 |
| 1.6 | 7.8308 × 102 | 7.8334 × 102 | 8.0363 × 102 | 3.3087 × 101 | 3.3080 × 101 | 3.4547 × 101 |
| 1.8 | 8.2032 × 102 | 8.2058 × 102 | 8.4225 × 102 | 7.3328 × 101 | 7.3303 × 101 | 7.6586 × 101 |
| 2 | 8.6221 × 102 | 8.6241 × 102 | 8.8561 × 102 | 1.4765 × 102 | 1.4757 × 102 | 1.5426 × 102 |
| 2.2 | 9.0462 × 102 | 9.0476 × 102 | 9.2939 × 102 | 2.7338 × 102 | 2.7317 × 102 | 2.8566 × 102 |
| 2.4 | 9.4047 × 102 | 9.4056 × 102 | 9.6610 × 102 | 4.6820 × 102 | 4.6770 × 102 | 4.8918 × 102 |
| 2.6 | 9.6011 × 102 | 9.6010 × 102 | 9.8548 × 102 | 7.4309 × 102 | 7.4201 × 102 | 7.7582 × 102 |
| 2.8 | 9.5346 × 102 | 9.5338 × 102 | 9.7703 × 102 | 1.0927 × 103 | 1.0906 × 103 | 1.1391 × 103 |
| 3 | 9.1418 × 102 | 9.1415 × 102 | 9.3441 × 102 | 1.4891 × 103 | 1.4858 × 103 | 1.5488 × 103 |
| A11 (kg) | B11 (kg/s) | |||||
|---|---|---|---|---|---|---|
| ω | HAMS | WAMIT® | Hydrostar® | HAMS | WAMIT® | Hydrostar® |
| 0.2 | 8.3818 × 102 | 8.3854 × 102 | 8.6347 × 102 | 5.9702 × 10−1 | 5.9721 × 10−1 | 6.2698 × 10−1 |
| 0.4 | 8.5111 × 102 | 8.5148 × 102 | 8.7701 × 102 | 4.8315 × 100 | 4.8329 × 100 | 5.0754 × 100 |
| 0.6 | 8.6790 × 102 | 8.6824 × 102 | 8.9452 × 102 | 1.6554 × 101 | 1.6558 × 101 | 1.7395 × 101 |
| 0.8 | 8.8657 × 102 | 8.8693 × 102 | 9.1401 × 102 | 3.9904 × 101 | 3.9913 × 101 | 4.1945 × 101 |
| 1 | 9.0548 × 102 | 9.0584 × 102 | 9.3367 × 102 | 7.9279 × 101 | 7.9292 × 101 | 8.3352 × 101 |
| 1.2 | 9.2291 × 102 | 9.2323 × 102 | 9.5164 × 102 | 1.3917 × 102 | 1.3918 × 102 | 1.4633 × 102 |
| 1.4 | 9.3720 × 102 | 9.3726 × 102 | 9.6595 × 102 | 2.2390 × 102 | 2.2386 × 102 | 2.3536 × 102 |
| 1.6 | 9.4581 × 102 | 9.4593 × 102 | 9.7449 × 102 | 3.3699 × 102 | 3.3692 × 102 | 3.5412 × 102 |
| 1.8 | 9.4700 × 102 | 9.4728 × 102 | 9.7517 × 102 | 4.8075 × 102 | 4.8064 × 102 | 5.0489 × 102 |
| 2 | 9.3921 × 102 | 9.3948 × 102 | 9.6609 × 102 | 6.5558 × 102 | 6.5535 × 102 | 6.8779 × 102 |
| 2.2 | 9.2083 × 102 | 9.2108 × 102 | 9.4576 × 102 | 8.5924 × 102 | 8.5877 × 102 | 9.0016 × 102 |
| 2.4 | 8.9104 × 102 | 8.9127 × 102 | 9.1343 × 102 | 1.0865 × 103 | 1.0857 × 103 | 1.1362 × 103 |
| 2.6 | 8.4981 × 102 | 8.5006 × 102 | 8.6922 × 102 | 1.3295 × 103 | 1.3283 × 103 | 1.3873 × 103 |
| 2.8 | 7.9810 × 102 | 7.9838 × 102 | 8.1423 × 102 | 1.5780 × 103 | 1.5761 × 103 | 1.6426 × 103 |
| 3 | 7.3805 × 102 | 7.3801 × 102 | 7.5047 × 102 | 1.8209 × 103 | 1.8180 × 103 | 1.8902 × 103 |
| Properties | HAMS | Hydrostar® | Relative Error |
|---|---|---|---|
| Displacement | 1.3683 × 104 m3 | 1.3683 × 104 m3 | 0.00 |
| z-Coordinate of the Buoyancy Center | −1.3157 × 101 m | −1.3185 × 101 m | 2.12 × 10−3 |
| Area of the Immersed Body Surface | 6.5010 × 103 m2 | 6.5007 × 103 m2 | 4.61 × 10−5 |
| Inner Water Plane Area | 3.7027 × 102 m2 | 3.7128 × 102 m2 | −2.72 × 10−3 |
| Hydrodynamic Restoring in Heave | 3.7219 × 106 N/m | 3.7736 × 106 N/m | −1.37 × 10−2 |
| Hydrodynamic Restoring in Roll | −3.7649 × 108 Nm/rad | −3.6278 × 108 Nm/rad | 3.78 × 10−2 |
| Hydrodynamic Restoring in Pitch | −3.7649 × 108 Nm/rad | −3.6278 × 108 Nm/rad | 3.78 × 10−2 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y. HAMS: A Frequency-Domain Preprocessor for Wave-Structure Interactions—Theory, Development, and Application. J. Mar. Sci. Eng. 2019, 7, 81. https://doi.org/10.3390/jmse7030081
Liu Y. HAMS: A Frequency-Domain Preprocessor for Wave-Structure Interactions—Theory, Development, and Application. Journal of Marine Science and Engineering. 2019; 7(3):81. https://doi.org/10.3390/jmse7030081
Chicago/Turabian StyleLiu, Yingyi. 2019. "HAMS: A Frequency-Domain Preprocessor for Wave-Structure Interactions—Theory, Development, and Application" Journal of Marine Science and Engineering 7, no. 3: 81. https://doi.org/10.3390/jmse7030081