
Analyses of the Suction Anchor–Sandy Soil Interactions under Slidable Pulling Action Using DEM-FEM Coupling Method: The Interface Friction Effect
Abstract
:1. Introduction
2. Numerical Research on Suction Anchor–Soil Interaction
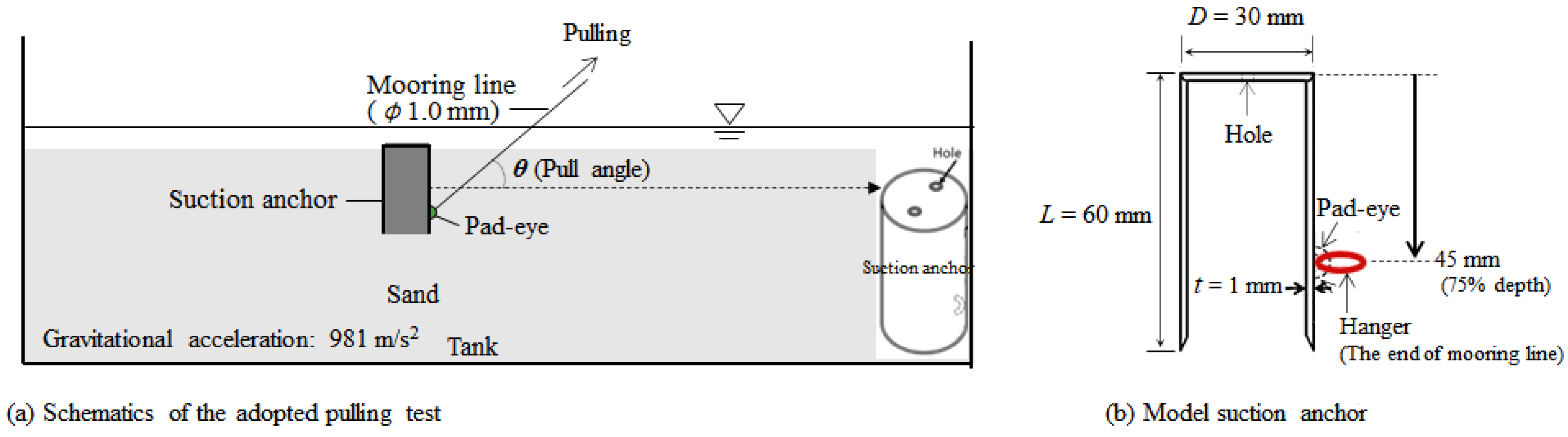
2.1. The Centrifuge Model Tests
2.2. The Numerical Model in DEM-FEM Simulations
3. Results and Analyses
4. Discussion
4.1. The Interface Friction Effect on Failure Patterns of Anchor–Soil Interactions
4.2. The Limitations of the Study and Future Research Directions
5. Conclusions
- (1)
- Interface friction significantly influenced the shapes of pulling force–displacement curves of suction anchors due to its effect on the pattern of suction anchor–soil interactions. Under low interface friction conditions, the pulling forces increased with pulling distance first and then tended to be stable, which corresponded to the stable interface slide during suction anchor–soil interactions. However, under high interface friction conditions, a distinct peak pulling force emerged with an increase in pulling distance, corresponding to internal soil shear failure.
- (2)
- The interface friction alters the movement of suction anchors and the surrounding soil deformation. Low interface friction leads to large pullout displacements and small rotation angles of suction anchors due to the weak impede effect on the pullout behaviors of suction anchors. In contrast, high interface friction leads to stronger suction anchor–sandy soil interaction forces, which impede the pullout of suction anchors and further result in obvious anchor rotation, larger soil deformations, and the emergence of an additional banded particle rotation area within the soil.
- (3)
- The conclusion on the effect of interface friction on the failure patterns of suction anchor–sandy soil interactions was drawn after the analyses of macro-to-particle-scale soil behaviors. Under high interface friction, longer particle trajectories and wider soil disturbance areas corresponded well to the much larger rotation angle of suction anchors and huge soil deformation. Finally, the characteristics of the two definitive soil failure patterns, namely the interface shear failure and internal soil shear failure during suction anchor–soil interactions, were identified.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fu, D.; Zhou, Z.; Yan, Y.; Pradhan, D.L.; Hennig, J. A method to predict the torsional resistance of suction caisson with anti-rotation fins in clay. Mar. Struct. 2021, 75, 102866. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, S.; Ren, Y.; Xu, H.; Ren, B.; Zhang, Y.; Gaunt, P. Site investigation and soil parameters for offshore suction bucket design: A case study of Houhu wind turbine. Ocean Eng. 2022, 255, 111458. [Google Scholar] [CrossRef]
- Wang, X.; Yang, X.; Zeng, X. Seismic centrifuge modelling of suction bucket foundation for offshore wind turbine. Renew. Energy 2017, 114, 1013–1022. [Google Scholar] [CrossRef]
- Yang, Y.; Bao, J.; Yang, H.; Pang, Z.; Wang, Y. Microscopic analysis of the influence of soil properties on the suction bucket installation in sand based on the CFD-DEM model. Comput. Geotech. 2023, 156, 105249. [Google Scholar] [CrossRef]
- Lai, H.; Gu, X.; Tu, W.; Lin, Y.; Xiao, J. Effects of soil small strain nonlinearity on dynamic impedance of horizontally loaded suction caisson for offshore wind turbines. Soil Dyn. Earthq. Eng. 2023, 165, 107731. [Google Scholar] [CrossRef]
- Huang, Z.; Shi, L.; Cai, Y. Suction contribution to uplift capacity of suction buckets under serviceability conditions. Ocean Eng. 2023, 283, 115041. [Google Scholar] [CrossRef]
- Ueda, K.; Uzuoka, R.; Iai, S.; Okamura, T. Centrifuge model tests and effective stress analyses of offshore wind turbine systems with a suction bucket foundation subject to seismic load. Soils Found. 2020, 60, 1546–1569. [Google Scholar] [CrossRef]
- Houlsby, G.; Kelly, R.; Huxtable, J.; Byrne, B. Field trials of suction caissons in sand for offshore wind turbine foundations. Géotechnique 2006, 56, 3–10. [Google Scholar] [CrossRef]
- Zhang, P.; Li, J.; Le, C.; Ding, H. Seismic responses of two bucket foundations for offshore wind turbines based on shaking table tests. Renew. Energy 2022, 187, 1100–1117. [Google Scholar] [CrossRef]
- Peng, Y.; Tan, Y.; Qu, L. Micromechanical analysis of the suction bucket-granular soil interactions under the pull action of anchor lines: Embedded length effect. Ocean Eng. 2024, 291, 116443. [Google Scholar] [CrossRef]
- Cheng, X.; Cheng, W.; Wang, P.; El Naggar, M.H.; Zhang, J.; Liu, Z. Response of offshore wind turbine tripod suction bucket foundation to seismic and environmental loading. Ocean Eng. 2022, 257, 111708. [Google Scholar] [CrossRef]
- Tu, W.; He, Y.; Liu, L.; Liu, Z.; Zhang, X.; Ke, W. Time Domain Nonlinear Dynamic Response Analysis of Offshore Wind Turbines on Gravity Base Foundation under Wind and Wave Loads. J. Mar. Sci. Eng. 2022, 10, 1628. [Google Scholar] [CrossRef]
- Ahmed, S.S.; Hawlader, B.C. Numerical analysis of inclined uplift capacity of suction caisson in sand. Int. J. Offshore Polar Eng. 2015, 25, 145–155. [Google Scholar] [CrossRef]
- Peng, Y.; Yin, Z.-Y. Micromechanical analysis of suction pile-granular soil interaction under inclined pulling load: Effect of pulling angle. Ocean Eng. 2023, 270, 113615. [Google Scholar] [CrossRef]
- Wensrich, C.M.; Katterfeld, A. Rolling friction as a technique for modelling particle shape in DEM. Powder Technol. 2012, 217, 409–417. [Google Scholar] [CrossRef]
- Peng, Y.; Yin, Z.-Y.; Ding, X. Analysis of particle corner-breakage effect on pile penetration in coral sand: Model tests and DEM simulations. Can. Geotech. J. 2023, 60, 749–765. [Google Scholar] [CrossRef]
- Bang, S.; Jones, K.; Kim, K.; Kim, Y.; Cho, Y. Inclined loading capacity of suction piles in sand. Ocean Eng. 2011, 38, 915–924. [Google Scholar] [CrossRef]
- Xu, Q.; Ye, J. An adaptively coupled DEM–FEM algorithm for geometrical large deformation analysis of member structures. Comput. Part. Mech. 2020, 7, 947–959. [Google Scholar] [CrossRef]
- Peng, Y.; Yin, Z.-Y. Micromechanical analysis of suction pile-granular soil interaction under inclined pulling load of mooring line: Mooring depth effect. Mar. Struct. 2023, 92, 103499. [Google Scholar] [CrossRef]
- Bang, S.; Leahy, J.C.; Cho, Y.; Kwon, O. Horizontal bearing capacity of suction piles in sand. Transp. Res. Rec. 2006, 1975, 21–27. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, K.; Cho, Y.; Bang, S. Centrifuge Model Tests on Suction Pile Pullout Loading Capacity in Sand; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Liu, F.; Yi, J.; Cheng, P.; Yao, K. Numerical simulation of set-up around shaft of XCC pile in clay. Geomech. Eng. 2020, 21, 489–501. [Google Scholar]
- Qu, L.; Yang, C.; Ding, X.; Kouroussis, G.; Zheng, C. A continuum-based model on axial pile-head dynamic impedance in inhomogeneous soil. Acta Geotech. 2021, 16, 3339–3353. [Google Scholar] [CrossRef]
- Kešner, A.; Chotěborský, R.; Linda, M.; Hromasová, M.; Katinas, E.; Sutanto, H. Stress distribution on a soil tillage machine frame segment with a chisel shank simulated using discrete element and finite element methods and validate by experiment. Biosyst. Eng. 2021, 209, 125–138. [Google Scholar] [CrossRef]
- Peng, Y.; Yin, Z.-Y. Micromechanical analysis of suction bucket-granular soil interaction under eccentric pulling action of mooring lines: Effect of horizontal pulling angle. Ocean Eng. 2023, 284, 115217. [Google Scholar] [CrossRef]
- Dratt, M.; Katterfeld, A. Coupling of FEM and DEM simulations to consider dynamic deformations under particle load. Granul. Matter 2017, 19, 49. [Google Scholar] [CrossRef]
- Bernhardt, M.L.; Biscontin, G. Experimental validation study of 3D direct simple shear DEM simulations. Soils Found. 2016, 56, 336–347. [Google Scholar] [CrossRef]
- Zheng, Z.; Zang, M.; Chen, S.; Zhao, C. An improved 3D DEM-FEM contact detection algorithm for the interaction simulations between particles and structures. Powder Technol. 2017, 305, 308–322. [Google Scholar] [CrossRef]
- Chan, E.L.; Washino, K. Coarse grain model for DEM simulation of dense and dynamic particle flow with liquid bridge forces. Chem. Eng. Res. Des. 2018, 132, 1060–1069. [Google Scholar] [CrossRef]
- Ahlman, B. Coarse-Graining Fields in Particle-Based Soil Models. Master’s Thesis, Umeå University: 2020.
- Kotrocz, K.; Mouazen, A.M.; Kerényi, G. Numerical simulation of soil–cone penetrometer interaction using discrete element method. Comput. Electron. Agric. 2016, 125, 63–73. [Google Scholar] [CrossRef]
- Fu, Z.; Chen, S.; Liu, S. Discrete Element Simulations of Shallow Plate-Load Tests. Int. J. Geomech. 2016, 16, 04015077. [Google Scholar] [CrossRef]
- Falagush, O.; McDowell, G.R.; Yu, H.-S.; de Bono, J.P. Discrete element modelling and cavity expansion analysis of cone penetration testing. Granul. Matter 2015, 17, 483–495. [Google Scholar] [CrossRef]
- Antypov, D.; Elliott, J. On an analytical solution for the damped Hertzian spring. Europhys. Lett. 2011, 94, 50004. [Google Scholar] [CrossRef]
- Diaz, B.D.; Rasulo, M.; Aubeny, C.P.; Fontana, C.M.; Arwade, S.R.; DeGroot, D.J.; Landon, M. Multiline anchors for floating offshore wind towers. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–9. [Google Scholar]
- Hung, L.C.; Lee, S.; Tran, N.X.; Kim, S.-R. Experimental investigation of the vertical pullout cyclic response of bucket foundations in sand. Appl. Ocean Res. 2017, 68, 325–335. [Google Scholar] [CrossRef]
- Khanal, M.; Elmouttie, M.; Poulsen, B.; Olsson, A.; Adhikary, D. Effect of loading rate on sand pile failure: 2D DEM simulation. Geotech. Geol. Eng. 2017, 35, 889–896. [Google Scholar] [CrossRef]
- Mondal, S.; Disfani, M.; Narsilio, G.A. Battered minipiles in fine-grained soils: Soil-structure interaction. Comput. Geotech. 2022, 147, 104762. [Google Scholar] [CrossRef]
- Brunelli, A.; De Silva, F.; Piro, A.; Parisi, F.; Sica, S.; Silvestri, F.; Cattari, S. Numerical simulation of the seismic response and soil–structure interaction for a monitored masonry school building damaged by the 2016 Central Italy earthquake. Bull. Earthq. Eng. 2021, 19, 1181–1211. [Google Scholar] [CrossRef]
- Qu, T.; Wang, M.; Feng, Y. Applicability of discrete element method with spherical and clumped particles for constitutive study of granular materials. J. Rock Mech. Geotech. Eng. 2022, 14, 240–251. [Google Scholar] [CrossRef]
- Du, L.; Liu, X.; Han, Y.; Deng, Z. Generation of irregular particle packing with prescribed statistical distribution, spatial arrangement, and volume fraction. J. Rock Mech. Geotech. Eng. 2022, 15, 375–394. [Google Scholar] [CrossRef]
- Arany, L.; Bhattacharya, S. Simplified load estimation and sizing of suction anchors for spar buoy type floating offshore wind turbines. Ocean Eng. 2018, 159, 348–357. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, X.; Li, J.; Yang, X.; Wang, H. A review on recent advancements of substructures for offshore wind turbines. Energy Convers. Manag. 2018, 158, 103–119. [Google Scholar] [CrossRef]
- Byrne, B.; Houlsby, G.; Martin, C.; Fish, P. Suction caisson foundations for offshore wind turbines. Wind Eng. 2002, 26, 145–155. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Grains | ||
| Density (ρ) | 1650 | kg/m3 |
| Elasticity modulus (E) | 1.0 × 106 | N/m2 |
| Friction coefficient (f) | 0.5 | \ |
| Restitution coefficient | 0.30 | \ |
| Rolling resistance (RR) | 0.20 | \ |
| Timestep | 5.0 × 10−5 | s |
| Poisson ratio (υ) | 0.30 | \ |
| Acceleration of gravity (g) | 981 | m/s2 |
| Suction anchor | ||
| Elasticity modulus (E) | 2.0 × 1011 | N/m2 |
| Friction coefficient (f) | 0.35, 0.55 | \ |
| Restitution coefficient | 0.80 | \ |
| Poisson ratio (υ) | 0.30 | \ |
| Roller | ||
| Elasticity modulus (E) | 2.0 × 1011 | N/m2 |
| Friction coefficient (f) | 0.0 | \ |
| Restitution coefficient | 0.8 | \ |
| Poisson ratio (υ) | 0.3 | \ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, Y.; Liu, B.; Wang, G.; Wang, Q. Analyses of the Suction Anchor–Sandy Soil Interactions under Slidable Pulling Action Using DEM-FEM Coupling Method: The Interface Friction Effect. J. Mar. Sci. Eng. 2024, 12, 535. https://doi.org/10.3390/jmse12040535
Peng Y, Liu B, Wang G, Wang Q. Analyses of the Suction Anchor–Sandy Soil Interactions under Slidable Pulling Action Using DEM-FEM Coupling Method: The Interface Friction Effect. Journal of Marine Science and Engineering. 2024; 12(4):535. https://doi.org/10.3390/jmse12040535
Chicago/Turabian StylePeng, Yu, Bolong Liu, Gang Wang, and Quan Wang. 2024. "Analyses of the Suction Anchor–Sandy Soil Interactions under Slidable Pulling Action Using DEM-FEM Coupling Method: The Interface Friction Effect" Journal of Marine Science and Engineering 12, no. 4: 535. https://doi.org/10.3390/jmse12040535