
Study of Hydrokinetic Energy Harvesting of Two Tandem Three Rigidly Connected Cylinder Oscillators Driven by Fluid-Induced Vibration

Abstract
:1. Introduction
2. The Oscillator Model of VIV
2.1. Physical Model
2.2. Fluid control Equation
2.2.1. Fluid Control Equation
2.2.2. Solids Governing Equation
2.2.3. Energy Calculation Equations
2.3. Computational Domain and Meshing
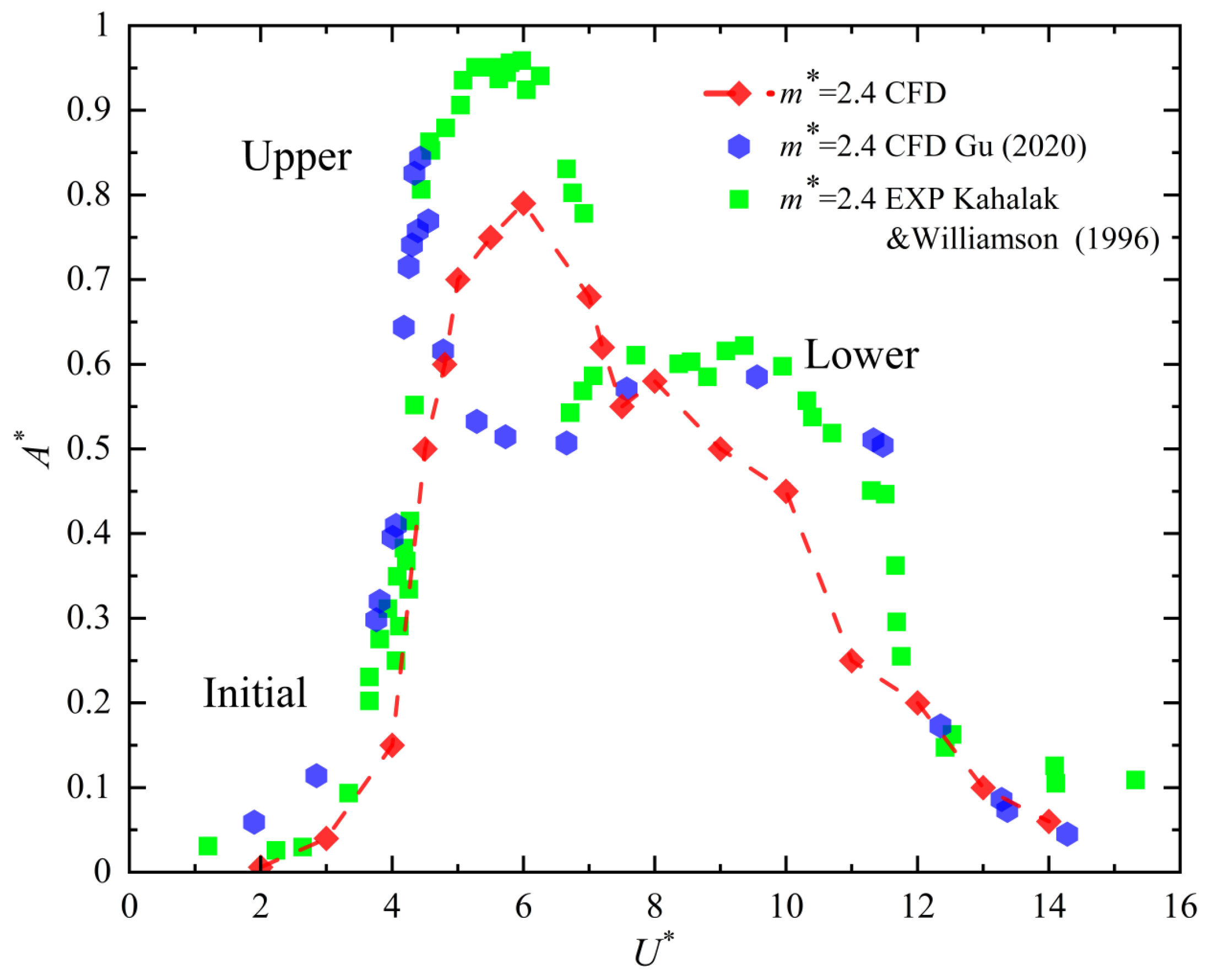
2.4. Numerical Method Validation
2.5. Verification of Grid Independence
3. Results and Discussion
3.1. Verification of Grid Independence
3.2. The FIV Response Results of Two Tandem Three-Cylinder Oscillators
3.2.1. Characterization of the Wake Vortexes
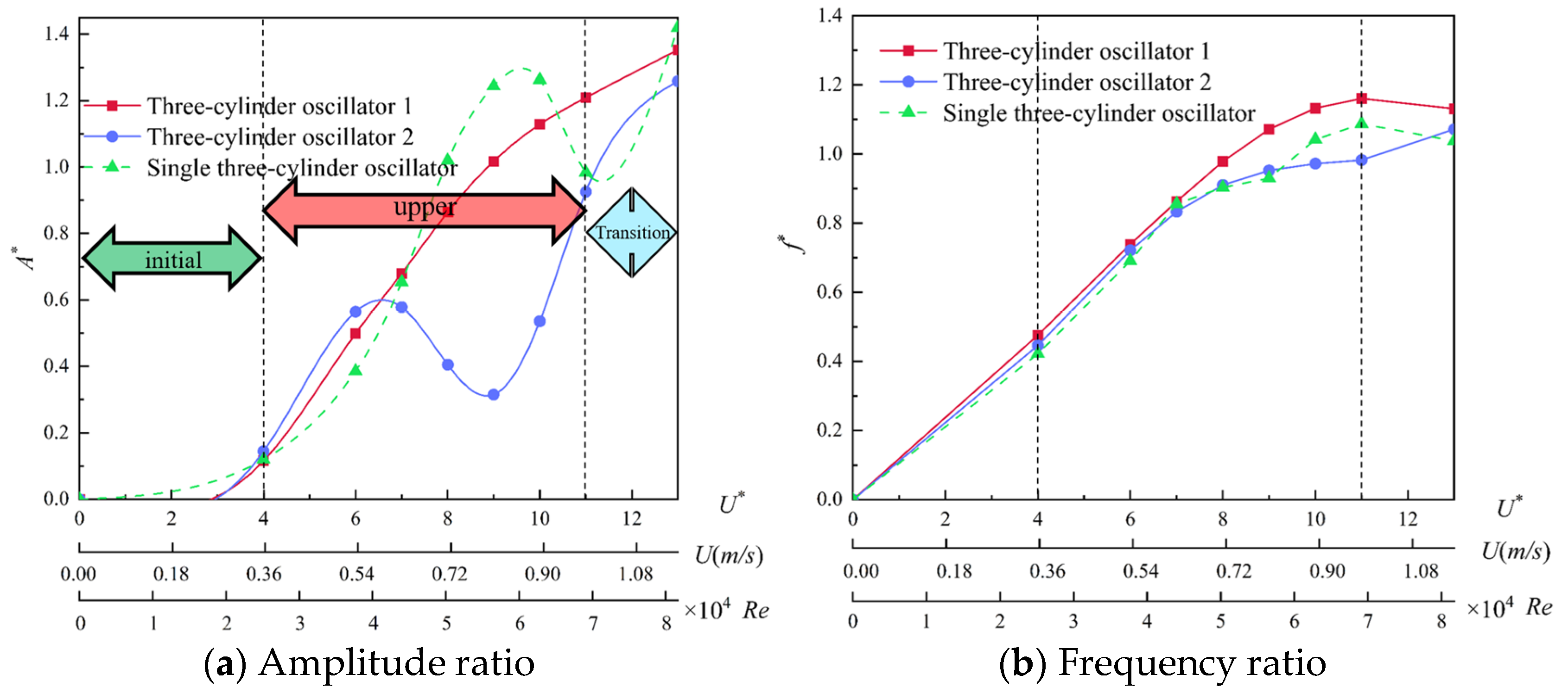
3.2.2. Analysis of the Amplitude Ratio and Frequency Ratio
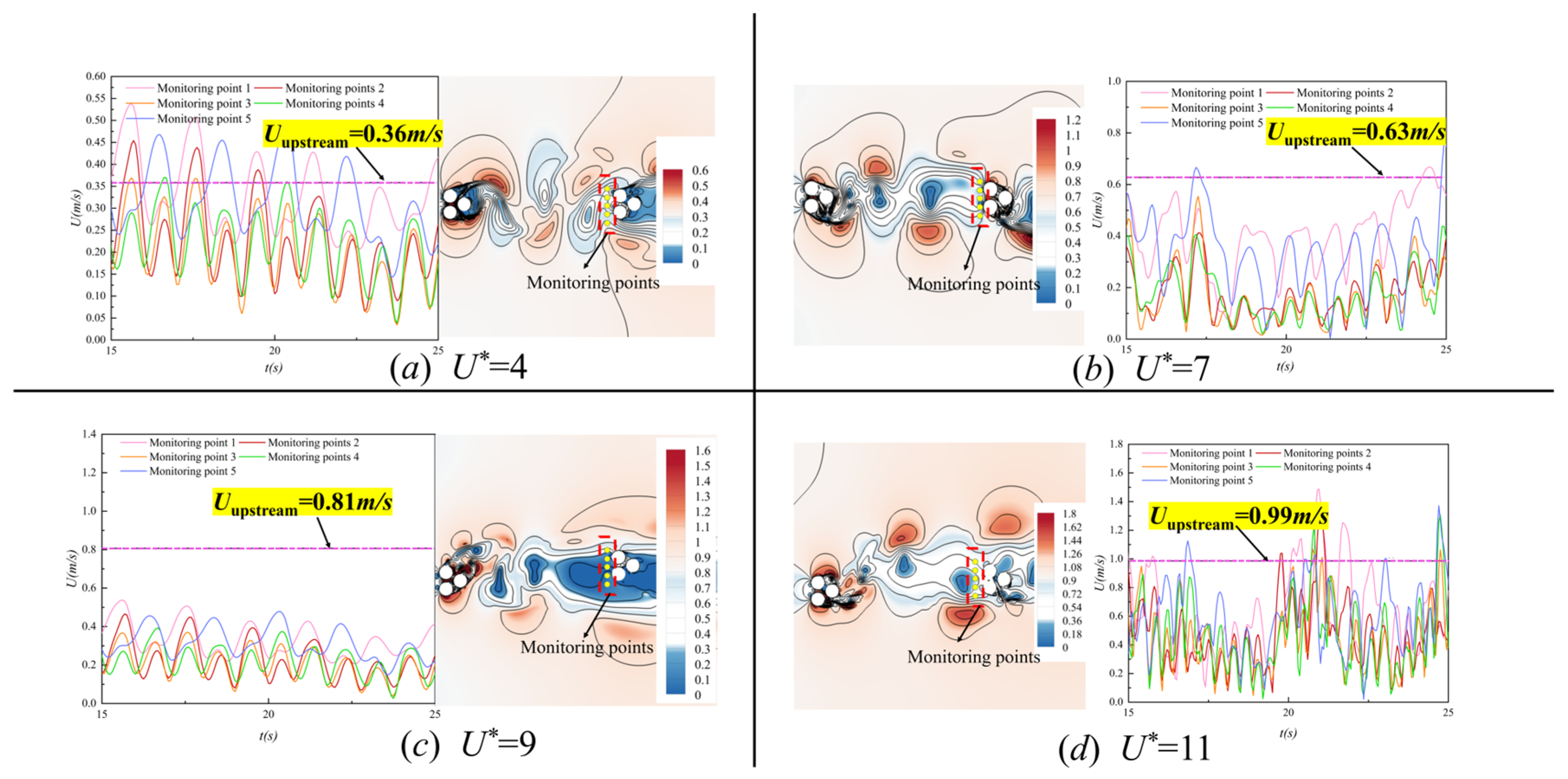
3.2.3. Effect of Incoming Flow Velocity on the Downstream Oscillator
3.2.4. Analysis of the Lift of Two Tandem Three-Cylinder Oscillators
4. Analysis of Energy Harvesting of the Two Tandem Three-Cylinder Oscillators
5. Conclusions
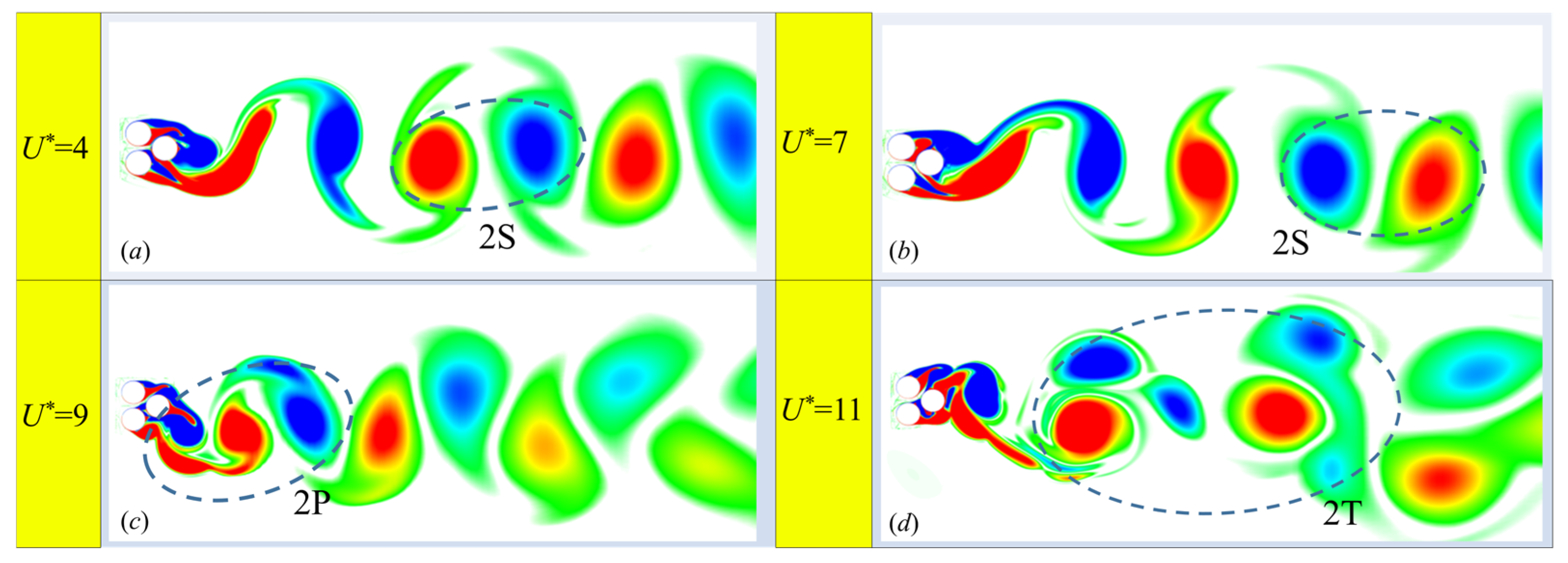
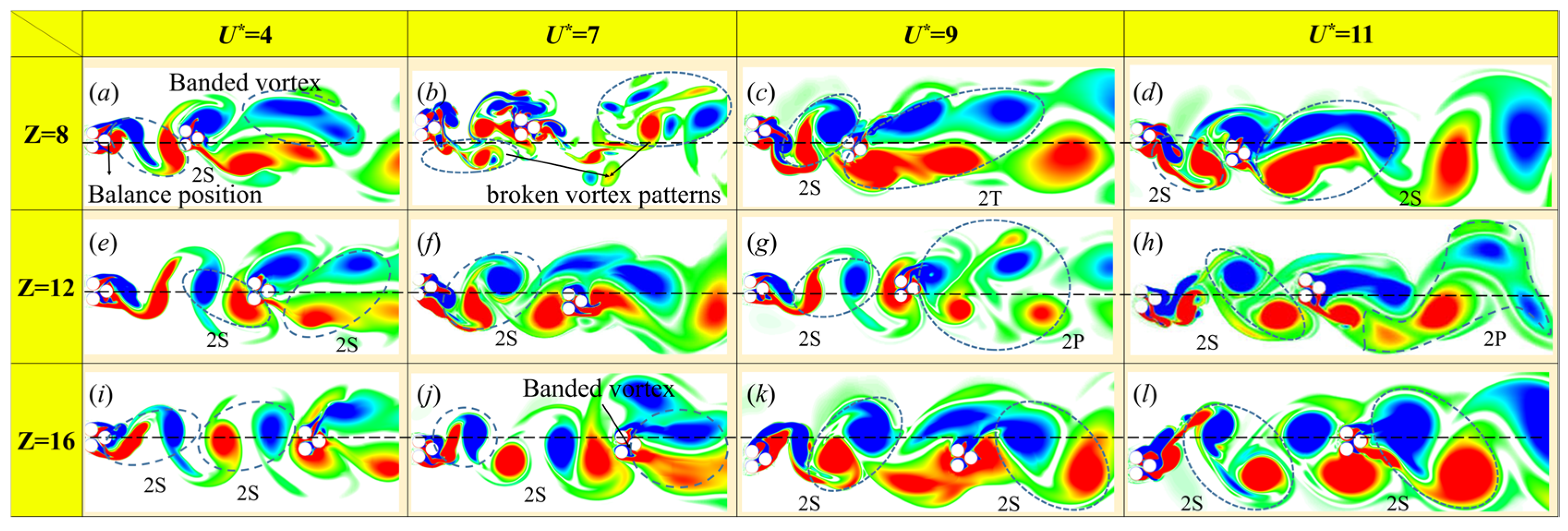
- When analyzing two rigidly connected oscillators with different inter-oscillator space ratios, the shedding vortices and wake flow patterns of the energy harvesting structure demonstrate more complex fluid–structure coupling effects compared with independent single oscillators. The wake vortices primarily correspond to the 2S and 2P modes. For a specific scenario where Z = 12 and U* = 9 or 11, the wake patterns of the downstream oscillator are in the 2P mode. In individual cases, the oscillators strongly interfere with each other, resulting in the formation of banded vortices and a significant number of broken vortices.
- In the structure of two tandem rigidly connected oscillators, the amplitude ratio of the vortex-excited vibration response of the upstream oscillator is not significantly influenced by the spacing ratio between the oscillators. However, the downstream oscillator, which is interfered with by the upstream shedding tail vortex, has a significantly disturbed VIV response and a large change in the amplitude ratio.
- At Z = 8, there is a clear interaction between the upstream and downstream oscillators, with the frequency ratio changing alternately. The spacing ratio between oscillators increases, allowing the upstream oscillator to achieve a higher amplitude ratio. At Z = 16, the amplitude ratio of the upstream oscillator is consistently larger than that of the downstream oscillator across all reduced velocities.
- When the inter-oscillator spacing is small (Z = 8), the downstream oscillator experiences intense flow velocity fluctuations with a fast fluctuation frequency. As Z increases, the velocity fluctuations gradually decrease, exhibiting more noticeable regularity. With U* = 4, as Z increases, the downstream oscillator flow velocity is weakened by interference from the upstream tail vortex, allowing it to eventually approach the inlet flow velocity.
- Overall, the lift value of the upstream oscillator increases as the reduced velocity increases, but the lift value of the downstream oscillator is noticeably affected by the inter-oscillator spacing ratio. When U* = 7, the lift value of the downstream oscillator decreases as the inter-oscillator spacing ratio increases. The difference in lift value between Z = 8 and Z = 16 is 42.34%.
- The energy harvesting effect of the tandem rigidly connected oscillator structure is minimally impacted by parameter Z within the vortex-induced vibration range. Variations in inter-oscillator spacing ratios result in noticeable differences in the upper branch. The interference between the upstream and downstream oscillators is most pronounced when U* = 9. The upstream oscillator achieves maximum energy harvesting efficiency, reaching 38.77%, while the downstream oscillator achieves a minimum efficiency of 3.92%. This results in a significant difference of 34.85% in energy harvesting efficiency. Under this condition, the majority of incoming energy is harvested by the upstream oscillator.
- PVIV and PDenisty increase with increasing U*. The rate of increase in the energy harvesting value and energy density is greatest in the upper branch. The maximum growth rate of the energy density of the upstream oscillator is 39.71% from U* = 8 to U* = 9 when Z = 8. Additionally, the maximum growth rate of the captured energy value is 32.19% when Z = 16.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, D.; Zhou, J.; Tan, T.; Yan, Z.; Sun, W.; Yin, J.; Zhang, W. Hydrokinetic piezoelectric energy harvesting by wake induced vibration. Energy 2021, 220, 119722. [Google Scholar] [CrossRef]
- Ibrahim, W.I.; Mohamed, M.R.; Ismail, R.M.T.R.; Leung, P.K.; Xing, W.W.; Shah, A.A. Hydrokinetic energy harnessing technologies: A review. Energy Rep. 2021, 7, 2021–2042. [Google Scholar] [CrossRef]
- Neshat, M.; Mirjalili, S.; Sergiienko, N.Y.; Esmaeilzadeh, S.; Amini, E.; Heydari, A.; Garcia, D.A. Layout optimisation of offshore wave energy converters using a novel multi-swarm cooperative algorithm with backtracking strategy: A case study from coasts of Australia. Energy 2022, 239, 122463. [Google Scholar] [CrossRef]
- Rostami, A.B.; Armandei, M. Renewable energy harvesting by vortex-induced motions: Review and benchmarking of technologies. Renew. Sustain. Energy Rev. 2017, 70, 193–214. [Google Scholar] [CrossRef]
- Wang, J.; Geng, L.; Ding, L.; Zhu, H.; Yurchenko, D. The state-of-the-art review on energy harvesting from flow-induced vibrations. Appl. Energy 2020, 267, 114902. [Google Scholar] [CrossRef]
- Wu, Z.; Ye, W.; Liu, R. Dynamics of a novel bistable electromagnetic vibration energy harvester. Chin. J. Appl. Mech. 2017, 34, 848–854. [Google Scholar] [CrossRef]
- Laws, N.D.; Epps, B.P. Hydrokinetic energy conversion: Technology, research, and outlook. Renew. Sustain. Energy Rev. 2016, 57, 1245–1259. [Google Scholar] [CrossRef]
- Wang, J.; Su, Z.; Li, H.; Ding, L.; Zhu, H.; Gaidai, O. Imposing a wake effect to improve clean marine energy harvesting by flow-induced vibrations. Ocean Eng. 2020, 208, 107455. [Google Scholar] [CrossRef]
- Kim, G.-Y.; Lim, C.; Kim, E.S.; Shin, S.-C. Prediction of Dynamic Responses of Flow-Induced Vibration Using Deep Learning. Appl. Sci. 2021, 11, 7163. [Google Scholar] [CrossRef]
- Yuce, M.I.; Muratoglu, A. Hydrokinetic energy conversion systems: A technology status review. Renew. Sustain. Energy Rev. 2015, 43, 72–82. [Google Scholar] [CrossRef]
- Mohammadi, S.; Hassanalian, M.; Arionfard, H.; Bakhtiyarov, S. Optimal design of hydrokinetic turbine for low-speed water flow in Golden Gate Strait. Renew. Energy 2020, 150, 147–155. [Google Scholar] [CrossRef]
- Shi, X.; Dong, J.; Yan, G.; Zhu, C. Flow around a rectangular cylinder placed in achannel with a high blockage ratio under a subcritical Reynolds number. Water 2021, 13, 3388. [Google Scholar] [CrossRef]
- Park, H.; Mentzelopoulos, A.P.; Bernitsas, M.M. Hydrokinetic energy harvesting fb3berom slow currents using flow-induced oscillations. Renew. Energy 2023, 214, 242–254. [Google Scholar] [CrossRef]
- Ding, L.; Bernitsas, M.M.; Kim, E.S. 2-D URANS vs. experiments of flow induced motions of two circular cylinders in tandem with passive turbulence control for 30,000 < Re < 105,000. Ocean Eng. 2013, 72, 429–440. [Google Scholar] [CrossRef]
- Kim, E.S.; Sun, H.; Park, H.; Shin, S.-C.; Chae, E.J.; Ouderkirk, R.; Bernitsas, M.M. Development of an alternating lift converter utilizing flow-induced oscillations to harness horizontal hydrokinetic energy. Renew. Sustain. Energy Rev. 2021, 145, 111094. [Google Scholar] [CrossRef]
- Modir, A.; Goudarzi, N. Experimental investigation of Reynolds number and spring stiffness effects on vortex induced vibrations of a rigid circular cylinder. Eur. J. Mech. B Fluids 2019, 74, 34–40. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Ben-Simon, Y.; Raghavan, K.; Garcia, E.M.H. The VIVACE converter: Model tests at high damping and reynolds number around 105. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 639–653. [Google Scholar] [CrossRef]
- Bernitsas, M.M.; Raghavan, K.; Ben-Simon, Y.; Garcia, E.M.H. VIVACE (Vortex Induced Vibration Aquatic Clean Energy): A New Concept in Generation of Clean and Renewable Energy From Fluid Flow. J. Offshore Mech. Arct. Eng. 2008, 130, 10–24. [Google Scholar] [CrossRef]
- Sun, H.; Ma, C.; Bernitsas, M.M. Hydrokinetic Power Conversion using Flow Induced Vibrations with Nonlinear (adaptive piecewise-linear) Springs. Energy 2016, 143, 1085–1106. [Google Scholar] [CrossRef]
- Narendran, K.; Murali, K.; Sundar, V. Investigations into efficiency of vortex induced vibration hydro-kinetic energy device. Energy 2016, 109, 224–235. [Google Scholar] [CrossRef]
- Williamson, C.H.K.; Govardhan, R. Vortex-Induced Vibrations. Annu. Rev. Fluid Mech. 2004, 36, 413–455. [Google Scholar] [CrossRef]
- Sun, H.; Ma, C.; Kim, E.S.; Nowakowski, G.; Mauer, E.; Bernitsas, M.M. Hydrokinetic energy conversion by two rough tandem-cylinders in flow inducedmotions: Effect of spacing and stiffness. Renew. Energy 2017, 107, 61–80. [Google Scholar] [CrossRef]
- Ma, C.; Sun, H.; Nowakowski, G.; Mauer, E.; Bernitsas, M.M. Nonlinear piecewise restoring force in hydrokinetic power conversion using flow induced motions of single cylinder. Ocean Eng. 2016, 128, 1–12. [Google Scholar] [CrossRef]
- Sun, H.; Ma, C.; Kim, E.S.; Nowakowski, G.; Mauer, E.; Bernitsas, M.M. Flow-induced vibration of tandem circular cylinders with selective roughness: Effect of spacing, damping and stiffness. Eur. J. Mech. B Fluids 2019, 74, 219–241. [Google Scholar] [CrossRef]
- Zhang, B.; Song, B.; Mao, Z.; Li, B.; Gu, M. Hydrokinetic energy harnessing by spring-mounted oscillators in FIM with different cross sections: From triangle to circle. Energy 2019, 189, 116249. [Google Scholar] [CrossRef]
- Zhu, H.; Tang, T.; Zhou, T.; Cai, M.; Gaidai, O.; Wang, J. High performance energy harvesting from flow-induced vibrations in trapezoidal oscillators. Energy 2021, 236, 121484. [Google Scholar] [CrossRef]
- Sun, C.; Zhou, T.; An, H.; Zhu, H.; Cheng, L. On the study of vortex-induced vibration of circular cylinders covered with different roughness. Appl. Ocean Res. 2022, 124, 103215. [Google Scholar] [CrossRef]
- Zhang, B.; Song, B.; Mao, Z.; Tian, W.; Li, B. Numerical investigation on VIV energy harvesting of bluff bodies with different cross sections in tandem arrangement. Energy 2017, 133, 723–736. [Google Scholar] [CrossRef]
- Xu, W.; Yang, M.; Wang, E.; Sun, H. Performance of single-cylinder VIVACE converter for hydrokinetic energy harvesting from flow-induced vibration near a free surface. Ocean Eng. 2020, 218, 108168. [Google Scholar] [CrossRef]
- Assi, G.R.S.; Bearman, P.W.; Meneghini, J.R. On the wake-induced vibration of tandem circular cylinders: The vortex interaction excitation mechanism. J. Fluid Mech. 2010, 661, 365–401. [Google Scholar] [CrossRef]
- Zhang, B.; Mao, Z.; Song, B.; Ding, W.; Tian, W. Numerical investigation on effect of damping-ratio and mass-ratio on energy harnessing of a square cylinder in FIM. Energy 2018, 144, 218–231. [Google Scholar] [CrossRef]
- Zhang, B.; Mao, Z.; Song, B.; Tian, W.; Ding, W. Numerical investigation on VIV energy harvesting of four cylinders in close staggered formation. Ocean Eng. 2018, 165, 55–68. [Google Scholar] [CrossRef]
- Luo, Z.; Nie, C.; Guo, T. Study on concentrated capture of Marine current power by VIV driven cylinder group structure. Acta Energiae Solaris Sin. 2020, 42, 89–94. (In Chinese) [Google Scholar] [CrossRef]
- Kim, E.S.; Bernitsas, M.M. Performance prediction of horizontal hydrokinetic energy converter using multiple-cylinder synergy in flow induced motion. Appl. Energy 2016, 170, 92–100. [Google Scholar] [CrossRef]
- Qiu, T.; Xu, Q.; Du, X.; Zhao, Y.; Lin, W. VIV of twin square cylinders in various configurations at a low Reynolds number. Ocean Eng. 2022, 260, 112067. [Google Scholar] [CrossRef]
- Wang, W.; Song, B.; Mao, Z.; Tian, W.; Zhang, T. Numerical investigation on VIV suppression of the cylinder with the bionic surface inspired by giant cactus. Ocean Eng. 2020, 214, 107775. [Google Scholar] [CrossRef]
- Chen, W.; Ji, C.; Williams, J.; Xu, D.; Yang, L.; Cui, Y. Vortex-induced vibrations of three tandem cylinders in laminar cross-flow: Vibration response and galloping mechanism. J. Fluids Struct. 2018, 78, 215–238. [Google Scholar] [CrossRef]
- Zou, Q.; Ding, L.; Zou, R.; Kong, H.; Wang, H.; Zhang, L. Two-degree-of-freedom flow-induced vibration of two circular cylinders with constraint for different arrangements. Ocean Eng. 2021, 225, 108806. [Google Scholar] [CrossRef]
- Liu, G.; Song, Z.; Xu, W.; Sha, M. Numerical study on the VIVs of two side-by-side elastically coupled cylinders under different Re and natural frequencies. Ocean Eng. 2023, 284, 115261. [Google Scholar] [CrossRef]
- Zhu, H.; Zhao, Y.; Qiu, T.; Lin, W.; Du, X.; Dong, H. Vortex-induced vibrations of two tandem rigidly coupled circular cylinders with streamwise, transverse, and rotational degrees of freedom. Phys. Fluids 2023, 35, 023606. [Google Scholar] [CrossRef]
- Han, P.; Pan, G.; Tian, W. Numerical simulation of flow-induced motion of three rigidly coupled cylinders in equilateral-triangle arrangement. Phys. Fluids 2018, 30, 125107. [Google Scholar] [CrossRef]
- Han, P.; Pan, G.; Zhang, B.; Wang, W.; Tian, W. Three-cylinder oscillator under flow: Flow induced vibration and energy harvesting. Ocean Eng. 2020, 211, 107619. [Google Scholar] [CrossRef]
- Barrero-Gil, A.; Alonso, G.; Sanz-Andres, A. Energy harvesting from transverse galloping. J. Sound Vib. 2010, 329, 2873–2883. [Google Scholar] [CrossRef]
- Zhao, M.; Tong, F.; Cheng, L. Numerical Simulation of Two-Degree-of-Freedom Vortex-Induced Vibration of a Circular Cylinder Between Two Lateral Plane Walls in Steady Currents. J. Fluids Eng. 2012, 134, 1097–1110. [Google Scholar] [CrossRef]
- Khalak, A.; Williamson, C.H.K. Dynamics of a hydroelastic cylinder with very low mass and damping. J. Fluids Struct. 1996, 10, 455–472. [Google Scholar] [CrossRef]
- Gu, M.; Song, B.; Zhang, B.; Mao, Z.; Tian, W. The effects of submergence depth on Vortex-Induced Vibration (VIV) and energy harvesting of a circular cylinder. Renew. Energy 2020, 151, 931–945. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| A (mm) | Amplitude of vibration | A* = A/D | Amplitude ratio |
| fosc | Oscillating cylinder frequency | f* = fosc/fn,water | Frequency ratio |
| Z = SD | Inter-oscillator spacing ratio | Ca | Added mass coefficient |
| K (Nm) | Spring stiffness | m* = mosc/md | Mass ratio |
| C | Total system damping | Re = UD/v | Reynolds number |
| Damping ratio | Natural Frequency in water | ||
| v (m2/s) | Kinematic viscosity | U (m/s) | Flow velocity |
| Mass of cylinders | U* = U/( D) | Reduced velocity | |
| L (m) | Length of cylinder | ma = Camd | Added mass |
| D (m) | Cylinder’s diameter | Cylindrical drainage quality |
| Description | Symbol | Value |
|---|---|---|
| Height of the square cylinder | D (m) | 0.08 |
| Spring stiffness | K (Nm) | 592 |
| Mass ratio | m* | 1.8 |
| Flow velocity | U (m/s) | 0.16~1.12 |
| Reduced velocity | U* | 2~13 |
| Natural frequency in water | 1.12 | |
| Length of cylinder | L (mm) | 1000 |
| Kinematic viscosity of water | v (m2/s) | 1.14 10−6 |
| Damping ratio | 0.1 |
| Description | Symbol | Value |
|---|---|---|
| Diameter of the cylinder | D (m) | 0.0508 |
| Spring stiffness | K (Nm) | 43.5 |
| Mass ratio | m* | 2.4 |
| Reduced velocity | U* | 2–14 |
| Natural frequency | fn,water | 1.12 |
| Kinematic viscosity | 1.14 × 10−6 | |
| Water density | ρ | 1000 |
| Number of Minimum Grid | Number of Grid | Average Max Lift Coefficient |
|---|---|---|
| 0.005 | 74,712 | 2.347314 |
| 0.001 | 418,989 | 2.179511 (7.148%) |
| 0.0005 | 11,459,669 | 2.17680 (0.124%) |
| Time Step | Average Max Lift Coefficient |
|---|---|
| 0.003 | 2.2954 |
| 0.0025 | 2.256 (1.718%) |
| 0.001 | 2.2457 (0.456%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chao, H.; Luo, Z.; Yang, T.; Dong, G. Study of Hydrokinetic Energy Harvesting of Two Tandem Three Rigidly Connected Cylinder Oscillators Driven by Fluid-Induced Vibration. J. Mar. Sci. Eng. 2024, 12, 515. https://doi.org/10.3390/jmse12030515
Chao H, Luo Z, Yang T, Dong G. Study of Hydrokinetic Energy Harvesting of Two Tandem Three Rigidly Connected Cylinder Oscillators Driven by Fluid-Induced Vibration. Journal of Marine Science and Engineering. 2024; 12(3):515. https://doi.org/10.3390/jmse12030515
Chicago/Turabian StyleChao, Haocheng, Zhumei Luo, Tao Yang, and Guanghe Dong. 2024. "Study of Hydrokinetic Energy Harvesting of Two Tandem Three Rigidly Connected Cylinder Oscillators Driven by Fluid-Induced Vibration" Journal of Marine Science and Engineering 12, no. 3: 515. https://doi.org/10.3390/jmse12030515